多杆式栽植机构参数化设计与仿真分析
2017-12-27黎宁慧薛金林丁兰英
黎宁慧,薛金林,丁兰英,张 炜,康 敏
南京农业大学 工学院,江苏 南京 210031
种植业占我国农业生产总值的一半以上,移栽是种植业中极其重要的生产环节,目前我国旱地作物的移栽作业多采用人工移栽的方式,由于农村从业人员外出就业比例的增多以及整体产业结构的调整,实际劳动力成本已明显高于机械化作业,因此,发展自动化、机械化移栽并提高其移栽效率势在必行[1]。旱地移栽机是主要针对玉米、棉花、包菜等旱地作物移栽的农业装备,能够代替人工实现自动、半自动移栽工作,已经在我国不同地域区块得到越来越广泛的应用[2]。
栽植机构作为旱地移栽机上的重要组成部件,根据其结构类型,可以将移栽机分为吊篮式、挠性圆盘式、链夹式[3-5]等多种,目前常见的栽植机构存在稳定性差、工作效率低、准确性低等缺点。因此,本文设计一种多杆式平行杆组栽植机构,实现栽植鸭嘴的平动,提升栽植机构的整体稳定性,并通过多杆机构的传动保证整体运动准确性。针对多杆机构设计较为困难的问题,本文采用ADAMS软件对所设计的栽植机构进行仿真分析[6-9],通过参数化设计理念开发用于参数化设计的人机交互界面,利用人机交互界面设定并调整栽植机构的结构参数,最终可以得到符合设计目标的多杆式平行杆组栽植机构的结构参数。此方法便于对多杆式平行杆组栽植机构进行设计,为多杆机构的设计方法提供了新思路,开辟了新道路。
1 多杆式栽植机构的结构与工作原理
多杆式栽植机构结构示意图如图1所示,其主要由鸭嘴组件和平行杆组两部分组成。

图1 多杆式平行杆组栽植机构结构示意图Fig.1 Structure of multi-linkage parallel bar group transplanting mechanism
鸭嘴组件主要由左栽植鸭嘴、右栽植鸭嘴、直线推杆、销钉等构件组成,其中杆IJ与直线推杆电机控制栽植鸭嘴的张合,其简化模型为曲柄滑块机构,I点定位销固定于右栽植鸭嘴上,同时通过滑槽与左栽植鸭嘴连接,当直线推杆电机推杆伸出时,推动杆IJ运动,I点上升,两片鸭嘴打开,当推杆收缩时,两片鸭嘴闭合。
平行杆组作为栽植机构中的传动部分,通过多个连杆带动鸭嘴按照既定轨迹精确运动,其整体机构简化模型为平行四杆机构,其中杆AB与杆EF平行且相等,杆BCD与杆FHK平行且相等,杆CG与杆HL平行且相等,而AE、BF、GL、CH、DK分别平行且相等,整体构成平行四杆机构实现鸭嘴的平动,D、K点处装有销轴,分别与鸭嘴支撑架及左、右栽植鸭嘴连接,杆GC作为原动件,通过电机实现逆时针方向的匀速转动,带动整个机构运动。
工作时,平行杆组与鸭嘴实现节拍配合,当平行杆组带动鸭嘴从最高点投苗点到达最低点栽植点时,鸭嘴打开,实现栽植;当平行杆组带鸭嘴上升离开栽植点时,鸭嘴闭合,到达最高点时,进行人工手动投苗,以此完成一个工作周期。
2 多杆式栽植机构运动学模型
为了研究多杆式栽植机构整体运动规律,采用解析法对该机构进行运动分析[10],建立机构的封闭矢量位置方程式,以原动件转动角度和各个杆件长度为已知量求得各个杆件转角等未知量,推导出关键点鸭嘴尖端的位置坐标即得知其位移规律,通过进一步求导可得到其速度、加速度规律。该多杆式栽植机构的机构运动简图见图2。

图2 机构运动简图Fig.2 Kinematic diagram of mechanism
以G点为坐标原点建立直角坐标系,其中原动件转动方向为逆时针,机组前进速度方向即多杆式栽植机构整体运动方向向左。多杆机构参数见表1。
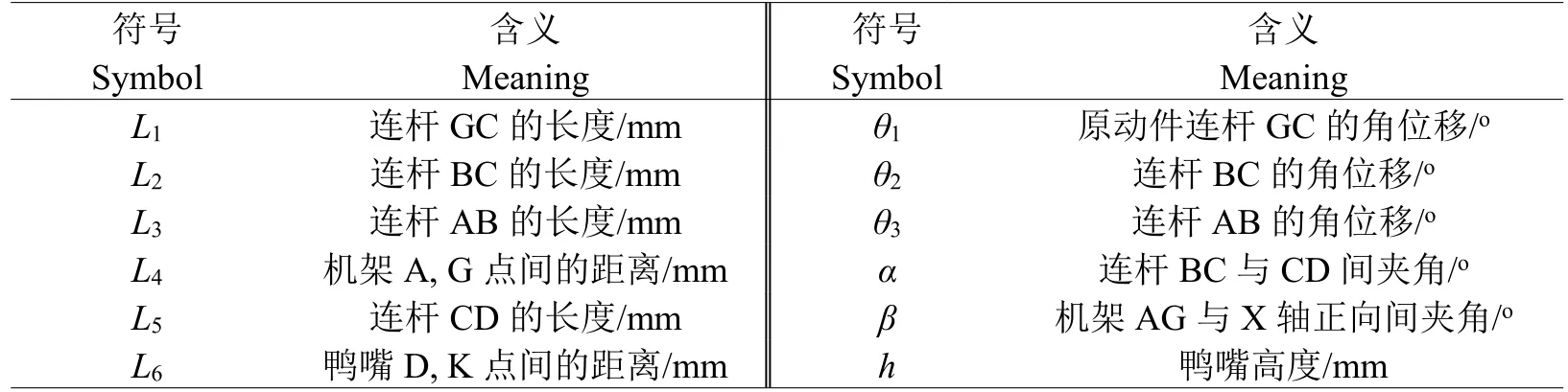
表1 多杆机构参数Table 1 Parameters of multi-linkage mechanism
若θ1、α、β、h、L1至L6为已知量,由矢量封闭图形GCAB可得封闭矢量方程为:

将式(1)向两坐标轴投影,即可得:

为了求得θ2,将方程组(2)整理并简化为:

式中:

解之可得:

通过式(4),可得到θ2。
C点位移方程为:

则D点位移方程为:

K点位移方程为:

而M点位于鸭嘴中心线上,其位移方程为:

综合式(1)~(8)可求得鸭嘴尖端M的位移方程,将其对时间分别求一阶及二阶导数可得到鸭嘴尖端M的速度及加速度方程。
3 多杆式栽植机构的参数化设计
3.1 多杆式栽植机构参数化模型的建立
由于采用传统计算手段完成多杆机构的设计较为困难,计算量过大,效率低[11],若采用计算机辅助完成多杆机构参数化设计,能够极大提高设计效率,并较易从数值分析角度验证机构性能。因此本文根据所建运动学模型利用ADAMS软件建立多杆式栽植机构的参数化模型,以便随时调整有关参数来观察栽植机构的运动规律。
(1)变量设计:参考《平面连杆曲线图谱》和所建的运动学模型,最后选定6个杆长参数和1个角度参数及其相应变化范围,具体参数信息如表2所示。
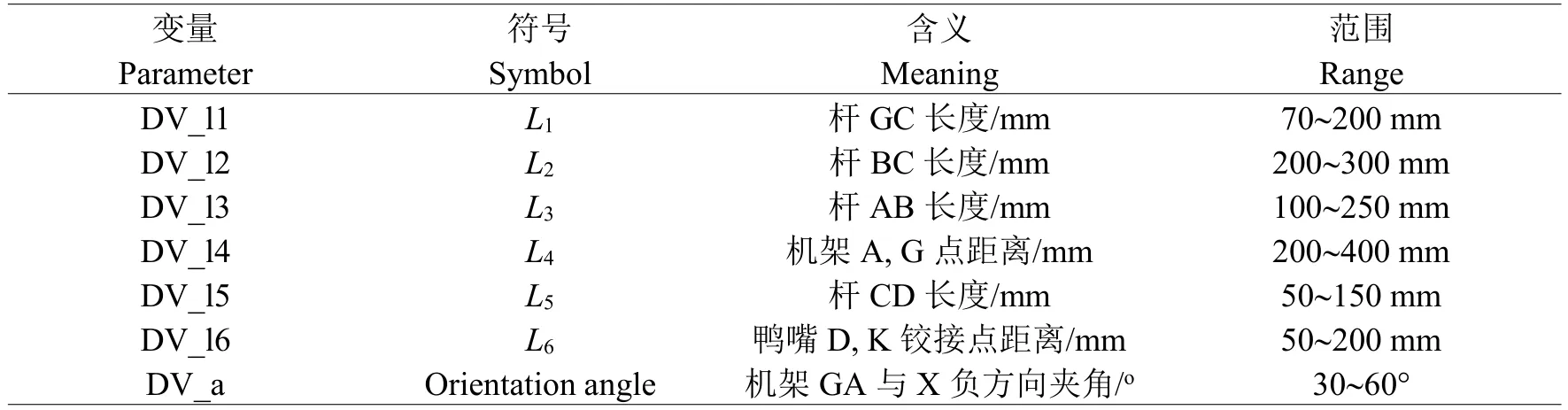
表2 参数信息表Table 2 Parameter information table
(2)参数化模型建立:利用Bodies中的LINKS及PLATE根据对应变量参数,建立相应参数化模型,其中各杆宽度设为10 mm,厚度为5 mm,L1至L6杆长分别设置为对应变量DV_l1到DV_l6,而DV_a角度变量通过E点坐标引入,即将E点X坐标设置为DV_l4*cos(DV_a),Y坐标设置为DV_l4*sin(DV_a),最后建立完成的多杆机构模型如图3所示。
(3)驱动及运动副添加:使用Bodies中的PLANE代替地面建立模型,为了便于参数化设计,采用虚拟装配方式建立运动副连接,即在各个杆件铰接MARKER点处建立对应转动副,同时对代替地面的平面添加水平移动副。最后,对平面添加移动驱动,对杆GC添加转动驱动,完成虚拟样机参数化模型的建立。
3.2 人机交互界面开发
为了方便地修改参数化模型中的各个参数变量,实时地对该栽植机构进行虚拟仿真试验,利用ADAMS软件的二次开发功能开发人机交互界面,如图4所示。
人机交互界面中信息栏左边显示的是信息栏里数值所代表含义,右边是数值的单位,通过改变信息栏的数值可实现杆组尺寸(L1至L6)、机组前进速度(Forward velocity)、原动件转动角速度(Rotational velocity)、机架定位角(Orientation angle)的动态调节。界面左上角显示的是该多杆机构模型示意图,图下方的四个按钮分别点击可以实现这些功能:虚拟样机装配(Assemble)、虚拟样机动作(Take action)、绘制静态轨迹(Draw static curve)、绘制动态轨迹(Draw dynamic curve)。
虚拟样机模型构件尺寸根据所设定的数值进行调整,并完成虚拟装配,虚拟样机模型经过设定时长的运动可实时地仿真出栽植鸭嘴的静态轨迹和动态轨迹。

图3 多杆机构模型Fig.3 Model of multi-linkage mechanism

图4 人机交互界面Fig.4 Human machine interface
4 机构虚拟试验及栽植轨迹分析
4.1 机构虚拟试验
根据相关设计资料和所设计栽植机构的性能需求,设定栽植机构设计目标如下:
(1)移栽机栽植效率:50~70株/min;
(2)秧苗株距要求:400~650 mm;
(3)秧苗栽植深度:40~60 mm;
(4)栽植投苗入土至出土水平分速度接近于0,且入土点、放苗点和出土点的水平位移为0;
(5)秧苗栽植后的直立度良好。
栽植鸭嘴的静态轨迹特性、动态轨迹特性、栽植轨迹最低端鸭嘴尖端的水平分速度和加速度是考查多杆式栽植机构性能的重要评价指标。通过人机交互界面上参数的设定进行栽植机构的虚拟运动试验,每设定一组参数可以得到一组鸭嘴的静、动态轨迹和鸭嘴尖端的位移、速度、加速度规律曲线图,从静、动态轨迹图和鸭嘴尖端规律曲线图可观察到该组参数下栽植机构各指标是否达标,根据设计目标判断此组参数的优劣并根据几组参数间的变化趋势调整参数的数值,重复此过程最终得到一组较优的参数:原动件转动角速度为300°/s,机组前进速度为520 mm/s时,机架定位角度为42°,L1杆长为120 mm,L2杆长为242 mm,L3杆长为180 mm,L4杆长为300 mm,L5杆长为80 mm,L6距离为120 mm。
4.2 栽植鸭嘴静、动态轨迹特性分析
该组较优参数下,栽植鸭嘴的静、动态轨迹分别如图5和图6所示。当原动件转动角速度为300°/s时,移栽机栽植效率为50株/min。栽植鸭嘴的静态轨迹配合机组前进速度520 mm/s可得到动态轨迹图,如图6所示。由图6可知,这时秧苗的栽植深度为60 mm,秧苗株距为624 mm,且出、入土动态轨迹与水平地面基本垂直,即能保证一定直立度,整体移栽轨迹平滑,可满足栽植要求。
为了进一步验证该组设计变量参数满足设计目标的要求,对栽植鸭嘴的尖端进行位移、水平速度、加速度的仿真分析[12],仿真结果如图7所示。

图5 静态轨迹图Fig.5The static track

图6 动态轨迹图Fig.6The dynamic track

图7 位移、水平速度、加速度图线Fig.7Graphs of displacement,horizontal velocity and acceleration
图7中的位移是栽植鸭嘴尖端随着时间变化相对于地面的位移,位置I是位移的峰值点也是人工投苗点,随着位移从位置I运动到位置II,鸭嘴向地面运动,鸭嘴尖端的水平分速度绝对值从1.1 m/s逐渐减小,加速度绝对值也在较小的范围(0.5 m/s2至2 m/s2)内变化;到达位置II时,鸭嘴尖端达到最低点栽植点,此时鸭嘴尖端的水平分速度绝对值为0.04 m/s接近于0,加速度也较小;在位置II附近鸭嘴尖端的水平分速度也基本保持接近于0,结合图6可见,在垂直方向位移约为-320 mm时出土点与入土点重合,位置II栽植点的水平方向位置坐标与出土点和入土点相同,即栽植鸭嘴从入土到出土这一过程在水平方向上的绝对位移量趋于0,充分地保证了零速移栽的作业要求。
综合以上栽植鸭嘴的静、动态轨迹特性分析及鸭嘴尖端的位移、速度、加速度仿真结果分析,该组参数能够很好地满足设计目标的要求。
5 结论
(1)设计一种具有准确度高、稳定性好等优点的多杆式栽植机构,建立该多杆式栽植机构的运动学模型为栽植鸭嘴尖端的动态特性分析提供理论依据;
(2)建立该栽植机构的虚拟样机参数化模型,开发便于参数化设计的人机交互界面,通过界面上参数的设定进行多杆式栽植机构的仿真分析。此方法便于对多杆式平行杆组栽植机构进行设计,为多杆机构的设计方法提供了新思路;
(3)通过ADAMS软件进行辅助虚拟试验,通过分析栽植静、动态轨迹,得出一组较为合理的栽植机构对应参数,并通过仿真分析栽植鸭嘴尖端的位移、速度、加速度规律,可知鸭嘴到达运动最低点时水平分速度约为0.04 m/s、加速度也较小,从而进一步验证该组参数的合理性,仿真结果表明该组参数能够满足设计目标。
[1]臧 英,罗锡文,周志艳.南方水稻种植和收获机械化的发展策略[J].农业机械学报,2008,39(1):60-63
[2]刘存祥,李晓虎,岳修满,等.我国旱地移栽机的现状与发展趋势[J].农机化研究,2012(11):249-251
[3]李其昀.机械化育苗移栽的现状与展望[J].农机化研究,2006(3):26-27
[4]韩占全,封 俊,曾爱军.我国旱地栽植机械的现状和发展前景[J].现代化农业,2000(8):29-31
[5]陈 风,陈永成,王维新.旱地移栽机现状和发展趋势[J].农机化研究,2005(3):24-26
[6]李松坡,余泳昌,陈新昌,等.基于ADAMS的移栽机关键机构设计与运动仿真分析[J].农机化研究,2015(1):47-49
[7]刘海彬.基于ADAMS的多连杆压力机参数化设计与优化研究[D].青岛:山东科技大学,2011:11-49
[8]潘启明,刘明刚.基于ADAMS的移栽机用凸轮摆杆扶苗机构设计及运动仿真分析[J].林业机械与木工设备,2009,37(9):34-36
[9]徐金苏,赵 匀.基于ADAMS和ANSYS的辣椒移栽机构的力学仿真与应力分析[J].浙江理工大学学报,2009,26(5):731-733
[10]孙 桓,陈作模,葛文杰.机械原理[M].北京:高等教育出版社,2006:37-43
[11]陈建能,王伯鸿,张 翔,等.多杆式零速度钵苗移栽机植苗机构运动学模型与参数分析[J].农业工程学报,2011,27(9):7-12
[12]Hua JP,Yan XY,Ma J,et al.Dimensional synthesis and kinematics simulation of a high-speed plug seedling transplanting robot[J].Computers and Electronics in Agriculture,2014(107):64-72
