基于模糊纠偏控制的磁导航AGV设计与实现
2017-12-26舒志兵
李 照,舒志兵
(南京工业大学电气工程与控制科学学院,南京 211800)
基于模糊纠偏控制的磁导航AGV设计与实现
李 照,舒志兵*
(南京工业大学电气工程与控制科学学院,南京 211800)
AGV作为一种典型的非完整约束型机器人,在工业和物流业中用于组建高效、快捷的物流系统。在电磁引导的基础上提出一种智能的控制方式,使AGV在工作中具有较强的稳定性、较快的响应速度和自动纠偏的能力。当AGV在运行过程中产生位置偏差和角度偏差时,使用模糊控制来调控AGV两个主动轮的速度,保证AGV运行于预定的轨迹。最后通过使用SIMULINK仿真验证AGV的纠偏能力,并在工业现场验证了AGV系统所需实现的功能,证明了该系统达到了速度快反应、智能化、稳定性强的要求。
AGV;电磁引导;模糊控制;轨迹纠偏
AGV是Automated Guided Vehicle的简写,翻译成中文为自动导航车[1],是一种自主驾驶、无人操纵、以蓄电池为动力的自动化运输设备[2-3]。AGV运行时能承载一定的重量在出发地和目的地之间自动运行[4]。AGV集声、光、电、计算机于一体,是轮式移动机器人的一个重要分支[5-7]。随着自动化仓储系统、柔性制造系统、柔性搬运系统和柔性装配系统等物流系统的快速发展,AGV的使用量逐步增加。
本文主要是对电磁引导下的AGV在一些复杂环境下运行时能够自动寻迹的控制方式进行优化,以达到系统具有较强的抗干扰能力[8]。根据AGV的运行状态,提出人机界面+运动控制器+伺服驱动器+电机的控制方案;根据设定的方案以CDF驱动器为基础,建立EtherCAT总线的从站模块,通过EtherCAT总线为控制器和伺服驱动器传输数据;为AGV选择合适的软件方案。当AGV在运行过程中产生偏差时,运用模糊控制来调控AGV的位姿。
1 AGV运动学模型
1.1 差动式AGV运动学模型
本文中的小车模型是四轮差速式AGV,后轮提供驱动力的同时,运动方向也是通过由小车的两个后轮调节速度来完成的,此类AGV的两个前轮的作用主要是保证运行过程中小车的平稳性。当AGV运行过程中需要转向时,可以调节两个后轮的速度使小车进行差速运动,从而达到纠偏的效果[7,9-11]。故小车的二维坐标运行图如图1所示,其中的主动轮用黑色表示。
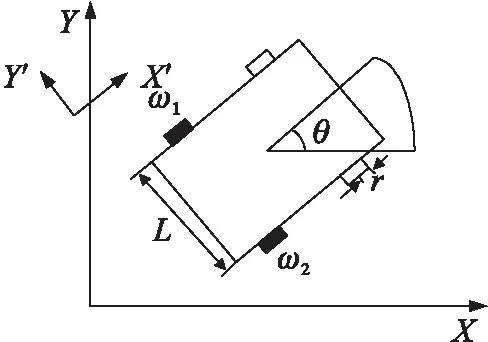
图1 AGV运动学模型
在图1中,G(X,Y)是AGV车体重心的位置;ω1和ω2分别表示AGV左右两个主动轮的角速度,θ是AGV运行时的方向角;L为车体宽度;r为车轮的半径;此时AGV满足公式:

(1)
(2)
(3)
将式(2)和式(3)进行离散化后可得:
(4)
(5)
在式(4)中,Ts为系统扫描周期。如果在AGV主动轮的电机上安装上编码器用于发送主动轮的速度信号给驱动器用于计算小车的位置,则可以得到系统的行程为:
(6)
S(k)=[s1(k)+s2(k)]/2
(7)
式中:S(k)为AGV在一个扫描周期内运行的距离。
2 AGV总体方案设计
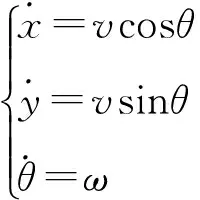
本项目中的AGV是一款电磁导航的四轮小车。该AGV的车体主要分为3个部分:(1)机械部分;(2)动力系统;(3)控制系统。由图2可知,小车的3个系统同时可以划分为多个小的组成部分[12]。
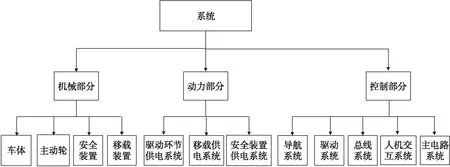
图2 AGV系统组成
AGV的控制环节可以分成:人机界面+控制器+EtherCAT总线+伺服系统+电磁检测模块及安全警报环节。控制器依靠EtherCAT总线数据传输的快速性和准确性对系统的运行状态进行实际检测。
2.1 EtherCAT从站模块建立
在搭建AGV实验平台时选择的控制器为Trio公司生产的MC4N。该产品在机器人领域有着较为广泛运用,其处理器是运算速率达到532 MHz的提速版ARM11。MC4N的通信方式是使用EtherCAT总线进行系统的数据传输,故选择的驱动器要能进行EtherCAT通信。
在本文中AGV的两个主动轮分别是由两个驱动器驱动,而驱动器通过EtherCAT总线将其内部参数发送给控制器,控制器通过得到数据判断AGV的运行状况,再将新的指令发送到伺服驱动器中,从而控制AGV的运行,使之运行在正确轨迹上。
3 模糊控制
3.1 模糊控制原理
模糊控制是一种相比于传统控制更加贴近于人类思维的控制方法。与传统的控制方式不同之处,模糊控制技术在复杂的多变量系统中,可以通过各种变量之间的关系完成对系统进行控制,从而使得系统的控制在直观上更加简便[13-17]。
模糊控制最重要环节是建立系统所需要的模糊控制器,在模糊控制中,将输出的被控制量与系统输入的数值进行对比,从而获得两者之间的偏差,再将通过模糊语言表示出来,并作为模糊控制器的实际输入变量[11]。
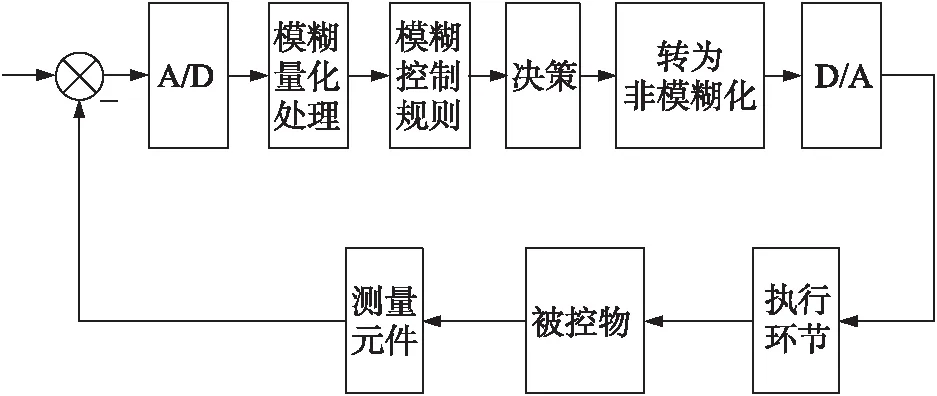
图3 模糊控制原理图
3.2 AGV的模糊控制
系统通过安装于AGV车体的多组传感器检测埋藏于地下的电缆,从而判断此时AGV的运行状况。将传感器检测得到的数据输入控制器中,并由系统计算得到AGV在运行时与正确轨迹之间的方向偏差角α和位置偏差量ΔS。通过设计一款两输入单输出的模糊控制器,帮助AGV正确运行于预定轨迹上,对存在的偏差进行及时的纠正。
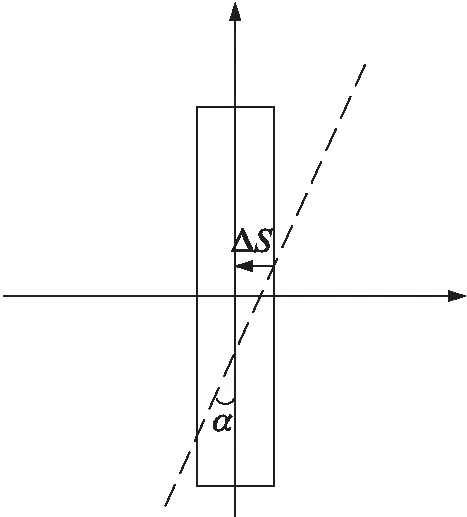
图4 偏差示意图
从理论上而言,位置偏差量ΔS的取值范围为[-∞,+∞],但是在实际情况中,由于受到客观条件限制,当ΔS的取值过大时,AGV的检测元件无法检测AGV的运行状态。故ΔS取值范围取[-240,+240],单位为mm。
方向偏差角α理论取值范围为[-90°,90°],实际可能偏差量范围的较小,其取值范围为[-45°,45°]。
AGV左右两轮角速度差(此处的速度为车轮速度而非电机转速)作为模糊控制器的输出量,其取值范围为[-30,30],单位设定成RPM。
方向偏差角α、位置偏差量ΔS和两车轮的转速的关系可以通过下列公式表示:
(8)
当Δt趋向于0时,式(8)可化简为:
(9)
对式(9)使用拉式变换可得到:
(10)
3.3 模糊控制器的设计
3.3.1 模糊控制器的思路
模糊控制器的基本原理如图5所示,首先对输入的数据使用模糊化处理,最终变成系统所需要的模糊量;紧接着输入的数据通过对照着由模糊规则所制定的模糊推理机,并由推理机得到输入与模糊规则的关系,从而推出结论,得到的结论将会作用于系统的执行元件上;执行元件执行相关任务得到的数据,再次作为输入量,反馈回模糊控制器中。
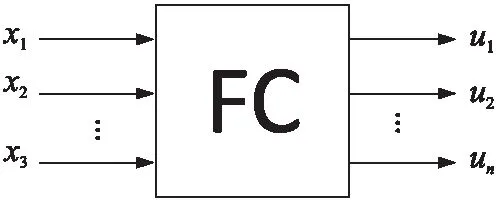
图5 多变量模糊控制器图
在本项目中所选用的模糊控制器是有两个输入和一个输出变量的模糊控制器。输入变量为方向偏差角α和位置偏差量ΔS;输出变量为AGV主动轮的角速度差。
3.3.2 模糊化设计
由上文可知方向偏差角α,位置偏差量ΔS和两主动轮角速度差Δω的取值范围。在确定模糊控制的输入变量和输出变量之后,需要根据变量的取值范围为输入量和输出量建立合适的模糊集合。
考虑到系统的运算等原因,在设置系统的模糊集合及运算过程中将不注明变量的单位,因此可以得到方向偏差角α的集合为{-45,-30,-10,0,10,30,45},单位为度。位置偏差量ΔS集合是{-240,-150,-60,0,60,150,240},该变量的单位是mm。主动轮的角速度差Δω的集合是{-30,-30,-10,0,10,20,30},单位为r/min(每分钟转数)。
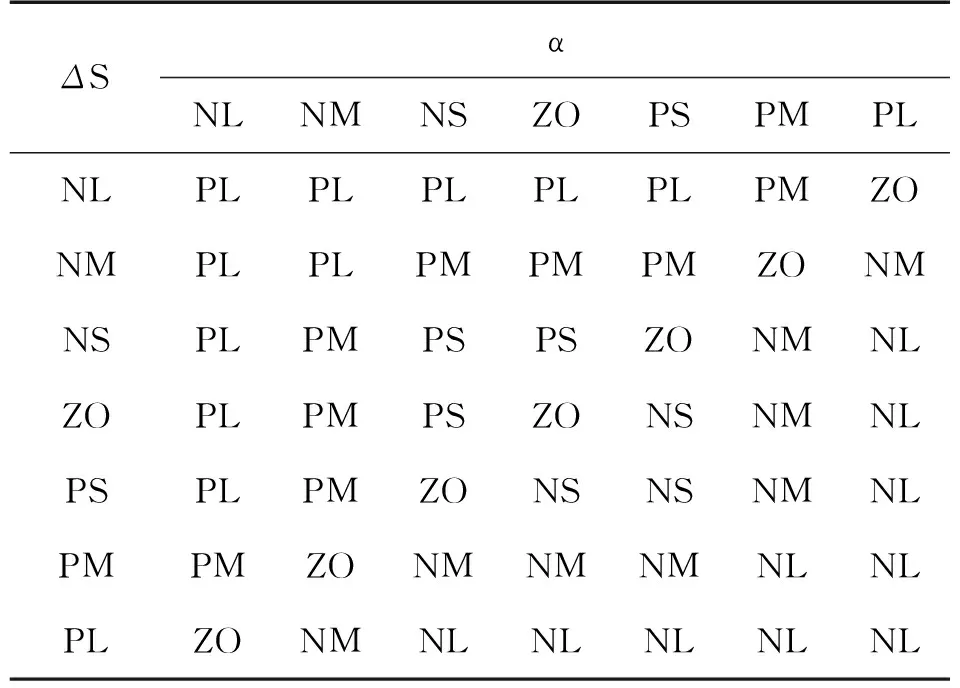
将模糊子集{NL,NM,NS,ZO,PS,PM,PL}与控制系统中的3个变量的集合对应,从而得到变量定义的模糊子集。
本文在定义参数的隶属度时选取的是三角形函数。当输入量超过范围时,由于无法得到相关的数据,系统将无法确定AGV的状态,故系统将产生报警信号,AGV停止工作。
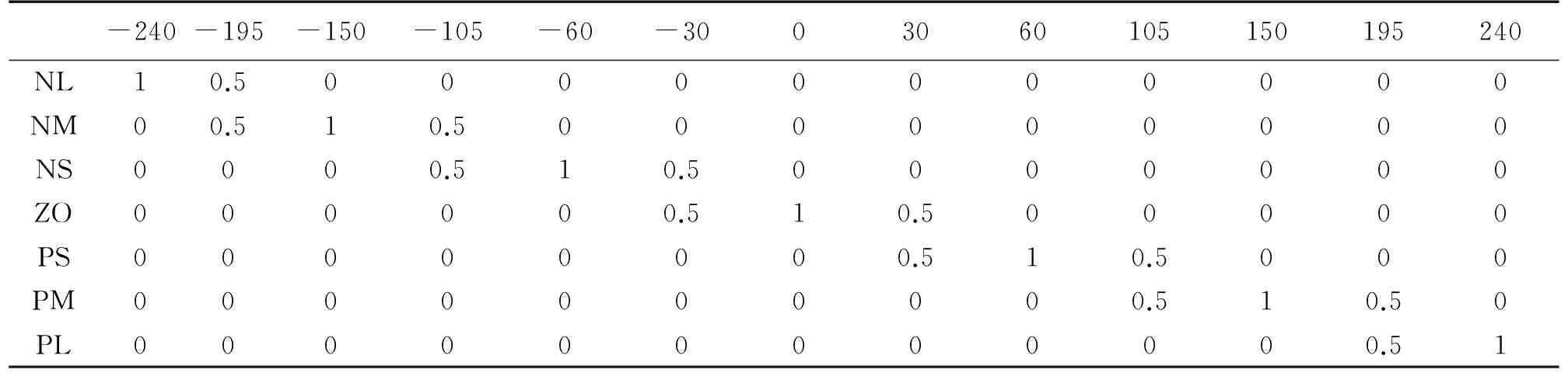
表1 位置偏差量的隶属度

表2 方向偏差角的隶属度
3.3.3 建立模糊控制器

(11)
3.4 仿真设计
根据在AGV运动学模型和各个参数之间的关系式,结合建立的模糊控制器,可以对AGV的纠偏运行进行仿真。
在图6中有两个输入变量K1、K2,其中K1代表的是位置偏移量ΔS,K2代表的是AGV运动方向偏差角α,将仿真数据输入到constant模块中便可以对系统进行仿真。此处的K1值为200,K2值为-35。
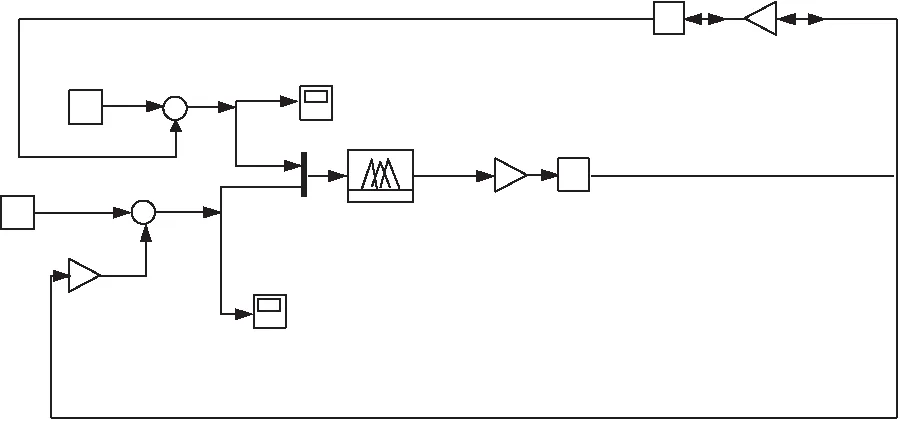
图6 总体控制仿真图

图7 位置偏差仿真图
图7和图8为AGV运行过程中位置和方向角产生偏差的时候,在模糊控制器对两轮角速度差Δω进行调节,使得AGV迅速返回到正确位置上的仿真图。
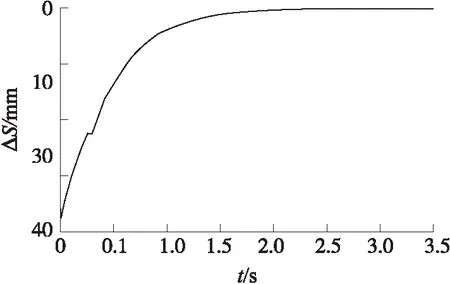
图8 偏差角仿真图
3.5 模糊控制的现场应用
控制器MC4N的内部程序编写是通过安装于电脑上Motion Perfect完成的。该款软件能支持IEC 61131-3协议下的PLC语言以及该公司自定义的编程语言和功能块。
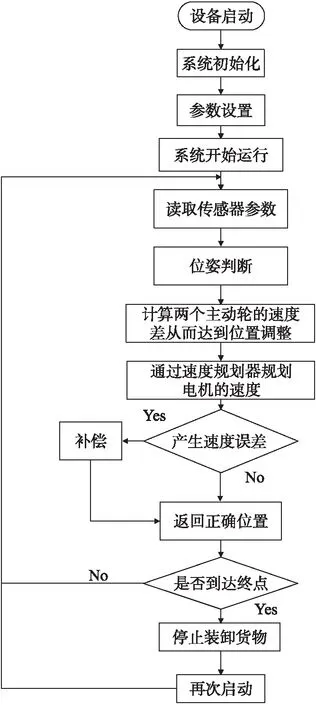
图10 系统运行图
由图9可知,该功能块在运用时能够支持三输入和三输出以内的计算强度,故能满足在本系统中的二输入单输出的要求。具体的软件流程如图10所示。
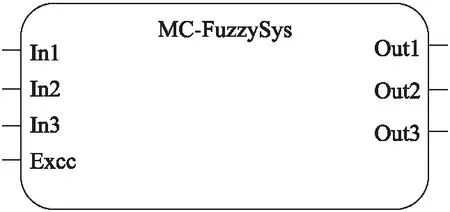
图9 模糊控制功能块
3.6 实际现场测试
为了监控工业现场中AGV运行时的纠偏过程,我们将AGV的初始位置设置为与正确位置存在位置和角度偏差的情况。当AGV运动时,通过电磁传感器输入的电压信号的来反映AGV的位置情况。
在测试过程中AGV的运行状态可由图12得知。初始工作时AGV的位置为A,此时AGV处于静止状态,故通过图11可以知道,此时电磁检测模块(图中车体黑色方块)的输出电压大约为3.5 V;当AGV驱动电机的抱闸松开小车便开始进行纠偏行动直到位置B;此时AGV已经位于电缆线上了,检测模块输出电压达到最低值,电压约为0.4 V;当AGV到达位置B处后,小车的位置仍需要进行调节直到AGV运行在正确的轨迹上,此时AGV的实际位置为C,通过实际采集波形可知,当AGV运行达到预定轨迹上时小车的检测元件仍有约1 V的电压输出。
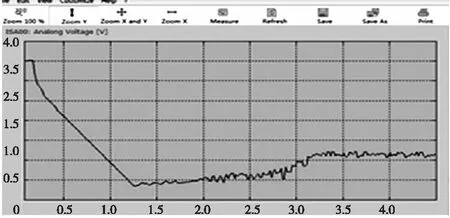
图11 传感器输出电压图

图12 AGV纠偏运行图
4 AGV动态测试
AGV的理想运行状态为直线运行且不发生任何偏滑,不需要进行纠偏等工作。但是基于在实际工程中很难出现这种情况,所以要求AGV系统的动态性能好,能够及时响应,在此对AGV系统的运行过程动态性能进行测试。
在本次测试中,通过控制器MC4N为电机规划速度运行轨迹。电机根据设计的速度轨迹进行运转,通过系统给定速度和电机运行的实际波形来判电机的动态性能。图13表示的是电机运行的速度波形,该图中有两条曲线,分别为电机的实际速度和给定速度,由于误差较小故只能看到一条波形。从图中可知,电机的动态跟随性能较好,误差大约在±2 r/min的范围,而此时的电机电流如图13所示。
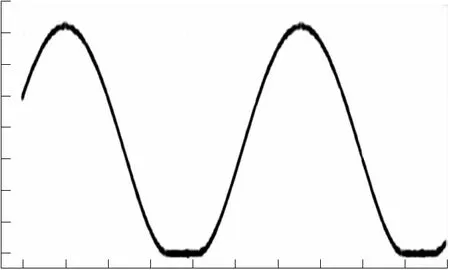
图13 速度跟随曲线
由图13可以看出,由于在测试电机跟随性能时,设定速度的波形一直变化的sin/cos波形,故在电机工作时,q轴电流总体上是一个sin/cos波形。同时由于AGV的运行速度的抖动和一些机械上误差从而导致了q轴电流的波形并非是一个规则的sin/cos波形,由图14可以看出,在q轴电流在上升过程中有一段电流轨迹并不平滑,出现了一段平稳的电流(箭头所指)。这是由于在AGV的机械安装并为达到理论上要求所导致的。

图14 q轴电流曲线
5 测试结果分析
通过对现场AGV主动轮所用电机的电流环、速度环以及动态响应的测试可以看出,系统中所使用的电机在工业现场的工作是正常的。通过波形图可以看出驱动电机的响应速度和精度都达到了实际的需求,但仍需解决一些机械问题。
[1] 蔡自兴.机器人学[M]. 第2版. 北京:清华大学出版社,2009.
[2] 墨菲.人工智能机器人学导论[M]. 北京:电子工业出版社,2004.
[3] Weyns D,Holvoet T,Schelfthout K,et al. Decentralized Control of Automatic Guided Vehicles:Applying Multi-Agent Systems in Practice[C]//Companion To the,ACM Sigplan Conference on Object-Oriented Programming,Systems,Languages,and Applications,OOPSLA 2008,October 19-13,2007,Nashville,Tn,Usa. DBLP,2008:663-674.
[4] 张辰贝西,黄志求. 自动导航车(AGV)发展综述[J]. 中国制造业信息化,2010(1):53-59.
[5] 朱江. AGV车载控制原理研究[D]. 昆明:昆明理工大学,2006.
[6] 史恩秀,黄玉美. 自主导航小车AGV定位方法的研究[J]. 传感技术学报,2007,20(1):233-236.
[7] 钟钜斌. 基于多种导航技术混合的AGV系统设计[D]. 浙江大学,2016:20-27.
[8] 郑炳坤,赖乙宗,叶峰. 磁导航AGV控制系统的设计与实现[J]. 自动化与仪表,2014,29(3):6-10.
[9] 胡跃民,周其节,裴海龙. 非完整控制系统的理论与应用[J]. 控制理论与应用,1996,13(1):1-9.
[10] 胡终须. 非完整移动机器人的鲁棒控制研究[D]. 广州:华南理工大学,2000:41-61.
[11] 蔡涛. AGV的超声波定位与避障研究[D]. 西安:西安理工大学,2008:15-25.
[12] 吕广明,薛渊,陆念力. 自动化仓库控制中心与AGV间的无线通讯技术[J]. 起重运输机械,2005(4):46-48.
[13] 席爱民. 模糊控制技术[M]. 西安:西安电子科技大学出版社,2008:90-102.
[14] 赵晨宇,陈息坤. 差速转向农业专用AGV小车的设计与模糊控制研究[J]. 农机化研究,2016(11):123-127.
[15] 刘超,刘丽萍,安新升,等. 基于模糊控制的太阳能驱动无线传感器网络路由算法[J]. 传感技术学报,2014,27(9):1238-1246.
[16] 宋宏伟,吕玉祥,王启银,等. 模糊算法在混合储能系统中的应用及仿真[J]. 电子器件,2014,37(5):962-967.
[17] 张克玲,钱祥忠.基于模糊控制的电动汽车再生制动系统的研究[J]. 电子器件,2015,38(4):876-881.
DesignandImplementationofMagneticNavigationAGVBasedonFuzzyRectificationControl
LIZhao,SHUZhibing*
(College of Electrical Engineering and Control Science,Nanjing Tech University,Nanjing 211800,China)
AGV(Automatic Guideding Vehicle) is a typical nonholonomic constraint robot,in the industry and logistic industry being used for the formation of efficient,fast logistic system. In order to make AGV strong stability,faster response speed and the ability to automatically correct,an intelligent control method is presented based on electromagnetic guidance. When it works,AGV will generate position deviation and the angular deviation. Aimed at correcting this,using fuzzy control adjusts the speed of the two driving wheels of the AGV to ensure that the AGV runs on a predetermined trajectory. Finally,the SIMULINK simulation is used to verify the error correction ability of AGVand at the same time,the function of AGV system is verified in industrial field. It is proved that the system meets the requirements of fast response,intelligence and stability.
AGV;electromagnetic guided;fuzzy control;trajectory correction
10.3969/j.issn.1005-9490.2017.06.019
2016-10-27修改日期2017-01-17
TM341
A
1005-9490(2017)06-1426-06

李照(1990-),男,现为南京工业大学电气工程与控制科学学院在读硕士研究生;主要从事运动控制技术、机器人等方面的研究,lizhao5776@163.com;
舒志兵(1965-),男,江苏人,南京工业大学运动控制研究所所长,智能系统与机器人研究所副所长,中国人工智能学会智能检测运动控制专委会秘书长,主要研究方向为机器人控制、交流伺服系统、DSP技术、现场总线、数控系统、运动控制系统等,shuzhibing@163.com。
