一种多传感器云融合技术的亚面表缺陷深度检测算法研究*
2017-12-26刘半藤陈友荣杨海波王章权
刘半藤,陈友荣,杨海波,王章权
(1.浙江树人大学信息工程学院,杭州 310015;2.浙江大学控制工程学院,杭州 310058)
一种多传感器云融合技术的亚面表缺陷深度检测算法研究*
刘半藤1,2*,陈友荣1,杨海波1,王章权1
(1.浙江树人大学信息工程学院,杭州 310015;2.浙江大学控制工程学院,杭州 310058)
针对未知深度的亚表面缺陷检测,各种传感器产生的特征信息难以直接应用的难题,提出了一种多传感器云融合技术的亚表面缺陷深度检测算法。首先,本文简要介绍涡流检测与超声检测两种经典无损检测模式;然后,在已知缺陷深度的样本集上建立云滴数学模型获取单一测量模式下缺陷深度的隶属度分布函数;最后,提出了一种D-S+PCR信息融合算法将不同传感器获取的隶属度分布转化为概率分布进行数据融合,以高斯拟合的方式实现亚表面缺陷深度的检测估计。实验结果显示:对比传统Bayes变换的D-S证据融合检测技术与单传感检测技术,本文提出的检测算法对亚表面缺陷深度检测具有较高的识别准确率。
亚表面缺陷;无损检测;云滴模型;D-S证据;PCR融合
大型构件导电结构件的亚表面缺陷(诸如扣件或搭接部位下的疲劳裂纹、应力腐蚀等弊病)的定量化无损检测,一直是航空航天、轨道交通、加工制造等重要领域需要研究解决的一类课题[1]。作为检测技术的一个重要组成部分,无损检测是指在不损伤检测对象的条件下,对检测对象自身的物理或结构特性进行检测、探伤和评估等一系列环节的综合性过程[2-3]。其对于控制和改进产品质量以及保证材料、零件、产品和设备的可靠性起着关键的作用,是现代工业生产不可分割的重要组成部分。
近年来,随着航空航天、交通、核电等重要行业的迅速发展,亚表面缺陷检测已然成为行业亟需解决的重要问题。无损检测作为一种安全性高、完整性强的技术,也成为国内外专业学者研究的热点领域[4-7]。文献[4]中作者结合涡流效应与法拉第光电效应提出了磁光成像传感器检测亚表面缺陷形状的方法,该方法具有快速、实时、大面积和可视化等优势。文献[5]中作者研究了基于水浸超声传感器的曲面构件缺陷检测定量方法,并对凹、凸两种曲面内的缺陷回波进行有效性验证,该方法克服了传统检测方法成本高以及适用性较差等问题。文献[6]中作者提出了一种步骤简单、实用性强、效率高的无损探伤方法,在高速动车组列车车体运用渗透法检测焊接缺陷。文献[7]中作者研究了脉冲涡流传感器进行亚表面缺陷检测,并利用有限元分析方法验证该技术的有效性。该技术可以同时检测部件中不同深度的缺陷,获得更多的缺陷信息。
由于单一传感器检测具有各自的特点和有限的适用范围,无法全面地检测各类亚表面缺陷。因此,多传感器复合无损检测技术应运而生。基于多传感器复合无损检测的技术主要涉及信号处理分析、数值建模、数据融合以及反演分析等学科领域,属于新型检测技术的研究范畴[8-9]。多传感器复合无损检测理论与技术的基础研究与集成应用已成为美国、英国、俄罗斯等国家无损检测研究领域的一个重要研究方向。在国内,随着重点航空飞行器的研制和航空产品进入批量制造阶段、轨道交通、核电事业的蓬勃发展,重大装备快速可靠复合式无损检测需求日益迫切。
针对亚表面缺陷深度的检测,不同传感器产生的各种特征信息难以直接应用的难题,本文提出了一种基于多传感器云融合技术的亚表面缺陷深度检测算法。多传感器融合技术起源于20世纪70年代,被广泛地应用于各种智能平台以及许多民事领域。多传感器信息融合实际上是对人脑综合处理复杂问题的一种功能模拟。与单一传感器检测相比,运用多传感器信息融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和健壮性。作为多传感器融合的研究热点之一,国内外专家已经进行了大量的研究,提出了许多信息融合技术[10-11]。目前,多传感器数据融合的不同层次对应不同的算法,包括加权平均融合、卡尔曼滤波法、Bayes估计、统计决策理论、概率论方法、模糊逻辑推理、人工神经网络、D-S证据理论等。文献[10]中作者提出了利用各数据源有效像元所占的比例来确定其对应权值的加权平均融合算法,降低数据源噪声,提高数据空间覆盖率与置信度。文献[11]中作者提出了多传感器卡尔曼滤波融合算法,具有较高的滤波精度,且能够成功消除测量系统误差。文献[12]中作者在D-S证据理论的基础上提出了电子电路故障定位的多传感器融合算法,说明多传感器融合计算方法的优越性。文献[13]中作者利用数据融合原理,将神经网络和证据理论进行有机融合,提出了多神经网络与证据理论融合的变压器故障综合诊断方法。
但是,传统数据融合方法无法处理大量实验数据产生的模糊隶属度函数,且为了提高传统数据融合方法的计算精度,本文提出了一种多传感器云融合技术的亚表面缺陷深度检测算法,克服单一传感器检测的局限性。对于涡流检测与超声检测两类传感器提取的特征信息,引用云滴数学模型获取各种传感器测量下各类缺陷的隶属度分布,并在此基础上提出了一种D-S+PCR信息融合算法对不同传感器获取的信息进行融合,以实现检测亚表面缺陷深度的目的。
1 基于云滴的隶属度计算模型
通过文献分析[4-13],发现超声传感器检测与涡流传感器检测是无损检测的两种典型方法。本文利用此两种传感器对亚表面缺陷深度进行检测。相比传统的拟合方法和Bayes变换方法来获取BPA分布,云滴模型汲取了自然语言的优点,能在数据挖掘中兼顾随机性和模糊性,合理构建其定性概念与定量表示之间的相互映射关系,在本文通过将单个传感器获得的数据转化为各类缺陷深度的隶属度分布,进一步求取更准确获得量化BPA;并且云滴模型可以降低实验样本的需求,适合于构建小样本检测模型。
首先,本文简要地介绍云滴数学模型的一些基本概念。一维正态云滴模型可以用期望E,熵En,超熵He 3个数字特征来反映。设U是一个用精确数值表示的一维定量论域,T是论域U上的定性概念,x是定义于U上的随机变量X的一次实现。若x满足:x~N(Ex,En′2),En′~N(En,He2),且x对T的隶属度是有稳定倾向的随机变量,x在论域U上的分布就叫做一维正态云,其中每一个x称为一个云滴。隶属度分布函数如下所示:
(1)
以矩形缺陷为例,本文采用多频电涡流检测试验系统测量缺陷的幅度信息,超声波检测系统测量缺陷的回波时间信息。为获得不同亚表面缺陷深度的期望、熵、超熵,对已知深度为1 mm~4.5 mm的亚表面缺陷每隔0.5 mm各采样100组数据,获得幅度数据为W=(wij)100×8,回波时间数据为C=(cij)100×8。通过样本数据,利用一阶绝对中心矩理论可以对云滴模型的期望E、熵En、超熵He进行参数估计。估计方法如下:
(2)

(3)

2 D-S+PCR多传感融合模型
获得未知深度的待检验亚表面缺陷样本t的各类隶属度后,需将涡流传感器与超声传感器的数据进行融合。20世纪60年代美国哈佛大学数学家Dempster在利用上、下限概率解决多值映射问题时,提出了著名的D-S证据理论以及对应的数据融合方法[14]。


(4)
引入PCR理论[15-17]对经典D-S正交融合进行改进,得到新的融合规则如下所示:
(5)
(6)
通过式(6)可以计算得到待检测样本t属于第i类深度的概率ni(t)。综上所示,基于多传感器云融合技术的亚表面缺陷深度检测算法过程如图1所示。

图1 基于多传感器云融合技术的亚表面缺陷深度检测算法流程图
由于待检验样本的缺陷深度未知,且并不一定严格属于上述的八类缺陷深度。因此,获得待检测样本t属于第i类缺陷深度的概率ni(t)后,并非采用最大概率对缺陷深度进行定量化估计,而是将概率分布(di,ni(t))进行高斯函数拟合。其中,di表示第i类缺陷深度的数值。拟合方程中的期望即为样本t的缺陷深度检测估计。高斯拟合方程式如下所示:
d=a×e[-(n-b)/c]2
(7)
式中:a、b、c表示待拟合的参量。
3 仿真实验
本文设计实验对比经典Bayes变换的D-S融合检测算法、单传感器检测算法与多传感器云融合技术的检测算法,分别检测不同深度的亚表面缺陷来验证本文算法的有效性。本文设计的涡流检测系统与超声检测系统如图2所示。
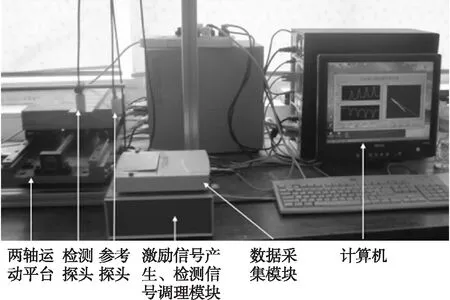
图2 涡流检测系统

图3 超声波检测仪
涡流检测设备由探头、激励信号产生电路、检测信号调理电路、数据采集卡、计算机以及两轴运动平台组成。其中探头分为检测探头和参考探头,探头同时包含了激励线圈和检测线圈,检测探头置于试件之上,参考探头一般置于参考试件上或简单悬空,本设计中将参考探头悬空,检测探头信号和参考探头信号进行差分得到有用信号;激励信号产生电路用来产生不同频率的电涡流激励信号;检测信号调理电路用于对探头的输出信号进行硬件处理,通常包括滤波、放大和检波等电路环节;信号调理单元的输出信号由NI的数据采集卡进行A/D转换并采集到计算机中,用Labview软件在计算机中编写相应上位机程序,对采集信号进一步进行软件滤波,去噪等信号预处理,通过上位机可以控制激励信号产生电路产生不同频率的电涡流激励信号和运动平台根据需求拖动试件;运动平台采用固高公司的两轴伺服机构。
实验时试件在运动平台的拖动下移动,检测探头挂在被测试件上方,试件拖动的速度为0.02 m/s,由于运动平台的抖动性,使得探头的提离在0.1 mm~0.5 mm之间随机变化,涡流信号的激励频率采用250 Hz,每种试件在不同提离的条件下各扫描100次。
本文设计导电结构体背面缺陷的检测实验,被测缺陷深度存在较小的区别,旨在通过实验检测和数据分析,对缺陷深度做出定量化估计。实验采用超声检测设备是上材电磁的UTA-3062E型双通道超声检测仪,主要由超声检测探头、内置的数据采集卡以及工控机组成。
实验采用食用油作为耦合剂,使超声波探头和被测试件紧密黏合,将超声波探头移动至试件背面有缺陷的位置处(提前标出),观察在上位机上显示的超声波波形,待波形稳定后,存储超对应的波形数据,如此反复测试。
为此,对已知深度为1 mm~4.5 mm的亚表面缺陷每隔0.5 mm分别采用涡流传感器与超声传感器各采样100组数据,估算云滴模型的期望、熵、超熵,如表1和表2所示。
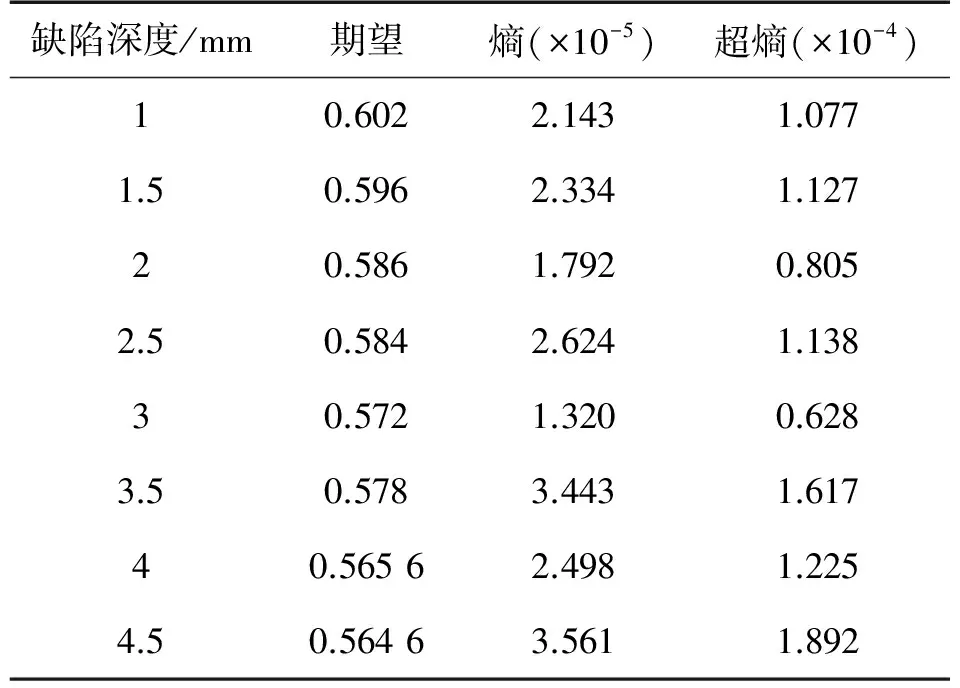
表1 涡流传感器采集幅度数据的云滴模型数字特征

表2 超声传感器采集回波时间数据的云滴模型数字特征
通过参数绘制了4.5 mm、4 mm以及3.5 mm三类深度缺陷的涡流传感器隶属度函数曲线与超声传感器隶属度函数曲线,如图4和图5所示。

图4 涡流传感器获得的幅值隶属度曲线

图5 超声传感器获得的回波时间隶属度曲线
从图4和图5中可以看出:每类缺陷深度隶属度曲线都呈现清晰的高斯分布特性;且不同的缺陷深度隶属度函数有重叠区域,说明采用单一的测量方法易出现误判现象。
通过表1和表2获得的数字特征建立的云滴数学模型,对未知深度的20个缺陷样本进行检测,计算缺陷深度估计值与真实值的误差。运用式(4)~式(7),计算出此20个样本的缺陷深度估计值。对比经典Bayes变换的D-S融合检测算法与多传感器云融合技术的检测算法,20个未知深度的缺陷样本检测误差如图6所示。对比多传感器云融合技术的检测算法与超声检测、涡流检测等单一传感器检测算法,20个未知深度的缺陷样本检测误差如图7所示。
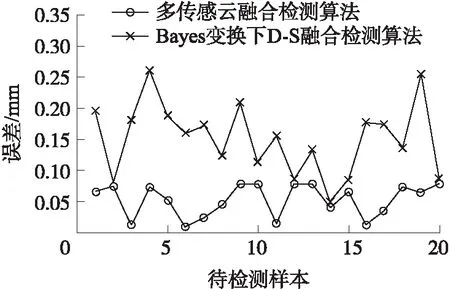
图6 两种融合算法检测误差对比图
实验结果显示:对比传统Bayes变换下的D-S证据融合检测技术与单传感器检测技术,本文提出多传感云融合技术的检测算法具有较高的识别准确率。
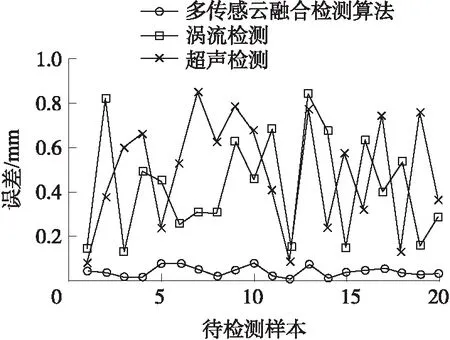
图7 多传感融合算法与单传感器检测算法误差对比图
4 结束语
为检测亚表面缺陷的深度,本文提出了一种多传感器云融合技术的检测算法。通过超声传感器与涡流传感器两种方法检测亚表面缺陷的深度,提取回波时间信息与幅度信息。在已知缺陷深度的样本集中,引入云滴模型估算数字特征,获取待检测样本单一测量模式下缺陷深度的隶属度分布函数。在此基础上,提出了一种D-S+PCR信息融合算法将不同传感器获取的隶属度分布转化为概率分布进行数据融合,以实现亚表面缺陷深度检测的目的。
[1] Wang Quanlong,Bai Qingshun,Chen Jiaxuan,et al. Subsurface Defects Structural Evolution in Nano-Cutting of Single Crystal Copper[J]. Applied Surface Science,2015,344:38-46.
[2] Arjun V,Sasi B,Purna Chandra Rao B,et al. Optimisation of Pulsed Eddy Current Probe for Detection of Sub-Surface Defects in Stainless Steel Plates[J]. Sensors and Actuators A:Physical,2015,226:69-75.
[3] Grys S,Vokorokos L,Borowik L. Size Determination of Subsurface Defect by Active Thermography-Simulation Research[J]. Infrared Physics and Technology,2014,62:147-153.
[4] 熊新. 铁磁材料表面缺陷的磁光成像检测方法研究[D]. 成都:电子科技大学,2014.
[5] 胡宏伟,彭凌兴,周正干,等. 曲面构件水浸超声检测缺陷定量研究[J]. 航空学报,2014,35(11):3166-3173.
[6] 褚宏宇,于玉杰. 渗透检测在铝合金车体中的实际应用[J]. 焊接,2015(1):61-63.
[7] 李岩松. 脉冲涡流检测频域特征提取与缺陷表征研究[D]. 厦门:厦门大学,2014.
[8] 司学慧,李小兵,张彦,等. 基于平方根UKF的多传感器融合再入段目标跟踪研究[J]. 系统工程与电子技术,2012,34(2):303-306.
[9] 郭忠文,王玺,胡乃军,等. 一种多传感器融合事件识别算法[J]. 中国海洋大学学报(自然科学版),2014,44(10):155-160.
[10] 陈芸芝,汪小钦.基于自适应加权平均的水色遥感数据融合[J]. 遥感技术与应用,2012,27(3):333-338.
[11] 马丽丽,张曼,陈金广. 多传感器集中式增量卡尔曼滤波融合算法[J]. 计算机工程与应用,2014(11):229-232.
[12] 朱大奇. 基于D-S证据理论的数据融合算法及其在电路故障诊断中的应用[J]. 电子学报,2002,30(2):153-155.
[13] 廖瑞金,廖玉祥,杨丽君,等. 多神经网络与证据理论融合的变压器故障综合诊断方法研究[J]. 中国电机工程学报,2006,26(3):119-124.
[14] Si Lei,Wang Zhongbin,Tan Chao,et al. A Novel Approach for Coal Seam Terrain Prediction Through Information Fusion of Improved D-S Evidence Theory and Neural Network[J]. Measurement,2014,54:140-151.
[15] Li Bo,Pang Fuwen. An Approach of Vessel Collision Risk Assessment Based on the D-S Evidence Theory[J]. Ocean Engineering,2013,74:16-21.
[16] Guo Kaihong,Li Wenli. Combination Rule of D-S Evidence Theory Based on the Strategy of Cross Merging Between Evidences[J]. Expert Systems with Applications,2011,38:13360-13366.
[17] Dong Qianjin,Liu Xia. Risk Assessment of Water Security in Haihe River Basin during Drought Periods Based on D-S Evidence Theory[J]. Water Science and Engineering,2014,7:119-132.
ResearchonMulti-SensorsRecognitionAlgorithmBasedonCloudFusionTechnologyforSubsurfaceDefectDepth*
LIUBanteng1,2*,CHENYourong1,YANGHaibo1,WANGZhangquan1
(1.College of Information engineering,Zhejiang Shuren University,Hangzhou 310015,China;2.College of Mechanical Engineering,Zhejiang University,Hangzhou 310058,China)
In consideration of the difficulty of directly using the multi-sensor detecting features information for the defect identification. The paper proposes an improved multi-sensors recognition algorithm based on cloud-fusion technology for subsurface defect depth evaluation. At first,two common nondestructive testing technologies such as ultrasonic testing(UT),eddy current testing(ECT)are introduced;at second the cloud model to calculate the probability distribution of single detecting method is carried out;then a fusion algorithm based on D-S and PCR theory is improved and used to fuse the probability from transformation the membership of multi-sensors,at last Gaussian fitting method is taken to evaluate the subsurface defects depth. The experimental result shows that the improved algorithm is superior to the existing algorithm;it can achieve better synthesis results and improve the correct target recognition rate.
subsurface defects;nondestructive testing;cloud model;D-S fusion;PCR fusion
10.3969/j.issn.1004-1699.2017.12.020
项目来源:浙江省公益性技术应用研究项目(2016C33038);浙江省科技厅重大科技专项项目(2015C01033);浙江树人大学中青年学术团队项目;浙江省基础公益研究项目(LGF18F010005)
2017-03-26修改日期2017-08-17
TP393
A
1004-1699(2017)12-1900-06
刘半藤(1984-),男,浙江余姚人,浙江大学控制科学与工程博士,浙江树人大学信息科技学院,主要从事无损检测技术、异源数据融合技术方面的研究。