气动加载闭环试验控制系统的研究
2017-12-25杨志永马扎根
杨志永,马扎根
(上汽大众汽车有限公司,上海201805)
气动加载闭环试验控制系统的研究
杨志永,马扎根
(上汽大众汽车有限公司,上海201805)
气动控制由于其低成本,无污染,低能耗等优点,一直是汽车零部件耐久试验的主要手段。由于空气具有可压缩特性,导致加载不稳定,不能满足精准试验的要求。从气源、气动控制元件、气动执行机构、传感器、控制逻辑及人机界面等方面,对气动加载闭环试验控制系统的稳定控制方法进行研究。
气动控制 加载 闭环控制 汽车零部件 耐久试验
1 前言
气动控制是指利用压缩空气作为动力源,通过可编程逻辑控制器(PLC)和气动控制元件来控制气动执行元件运动,从而实现规定动作的控制。由于气动控制低成本、无污染、低能耗等优点,一直是汽车零部件耐久试验的主要方法之一。由于下列原因,导致气动试验装置的加载不稳定:(1)空气具有可压缩特性;(2)气压受到使用设备数量的影响而产生波动;(3)高低温环境下,气体膨胀系数发生变化;(4)随着试验次数的增加,试件状态发生变化[1-2]。
随着试验要求的不断提高,试验过程中需要监控并反馈加载信号,光靠原先的开环控制系统已经不能满足要求。
以发明专利“气动力加载闭环控制装置和方法”[3]为核心技术,对气动试验系统进行改造升级,实现气动加载试验系统的闭环控制。
2 控制设备
闭环控制系统采用低成本硬件:储气罐、气源处理装置、伺服阀、气缸、传感器、PLC和触摸屏;软件采用独创而实用的控制算法,可实现闭环自动调节。
图1是发明专利“气动力加载闭环控制装置及方法”中的装置示意图。
装置的工作原理:现场气源(储气罐稳定气源)提供压缩空气给气动试验控制系统,控制器根据加载信号的反馈,程序化地调节加载气压。
从气源供给、干燥机、控制阀、执行机构、加热装置、下位机PLC程序、上位机人机界面等各个方面进行研究,采取相应措施,以实现加载的精确控制。
3 控制系统各组成部分的介绍和研究
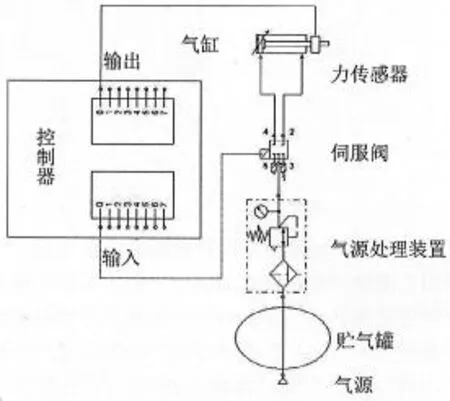
图1 气动力加载闭环控制装置示意图
3.1 气源
对气动控制系统的气源进行改造。使用高质量的气源处理系统,增加储气罐,降低气源的压力露点。
压缩空气是气动控制系统的动力源,由于空气具有可压缩性,气压容易产生波动,进而会影响试验加载的精度。要保证气动加载闭环系统的气源具有足够的流量和压力,必要时可以配备独立的压缩空气处理系统。同时,为每个单独的试验台架配备10~20 L容量的储气罐,进一步保障气源压力稳定。
压缩空气受环境温度影响较大,压缩系数随温度会产生较大的变化。一般来说,高温时气缸的输出力会变大,低温时气缸的输出力会变小,且容易结冰冻住。气缸输出力的变化可以通过PLC控制系统对输入气压的自动调节来解决,而气缸结冰冻住问题则需要通过降低气源压力露点来解决。
当环境温度低时,压缩空气受冷,其相对湿度会增加;当环境温度下降至相对湿度增加至100%时,便有水滴从压缩空气中析出,这时的温度就是压缩空气的压力露点。可按下列公式求得压力露点:

式中,
φ'——压缩后空气相对湿度,%;
φ——压缩前空气相对湿度,%;
p'——压缩后空气绝对压力,kPa;
p——压缩前空气绝对压力,kPa;
pb——压缩前在某一温度下的饱和水蒸气分压力,kPa;
pb'——压缩后在同一温度下的饱和水蒸气分压力,kPa;
令φ'=1,由式(1)得式(2)

由式(2)得到,空气压缩后开始析出水滴时的饱和水蒸气分压力pb'值,查阅参考文献[1]P25表3-1各压力下饱和水蒸气密度、分压力与温度的关系,可得到对应的温度,即为压力露点[1][4-5]。表1是101.3 kPa压力下的饱和水蒸气密度、分压力与温度的关系的示意表。
可以通过微热吸附式干燥机,将气源的压力露点降低。如果汽车零部件的耐久试验最低温度要求是-40℃,则需要配置能产生更低压力露点的压缩空气设备,以保证其正常工作。
3.2 气动控制元件
在气动控制系统中,气动控制元件(即各种控制阀)的作用是控制和调节压缩空气的压力、流量和方向,从而控制气动执行机构的运动速度和运动方向,并按规定的程序工作。利用气动控制元件组成各种气动控制回路,以保证气动执行元件或机构按设计的程序正常工作[5]。
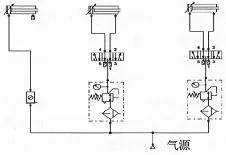
图2 某汽车零部件耐久试验台气路图
图2 为某汽车零部件耐久试验台架的气路示意图。试验台架采用比例伺服阀,对相关执行气缸的气压和流量进行独立自动调节,以保证试验的精度。比例伺服阀根据控制器模拟量输出模块输出的不同电流值,线性地调节输出气压和流量,从而控制气缸的推力及速度。
图3是4通道气动加载试验台架气路图。用比例伺服阀对各气缸进行闭环控制;同时在各比例伺服阀与气缸连接的气路中串入2位3通气控换向阀,并通过1个电控换向阀控制气控换向阀的换向。这样实现了试验台架停止工作后的卸气功能,保证操作工人及试件的安全。
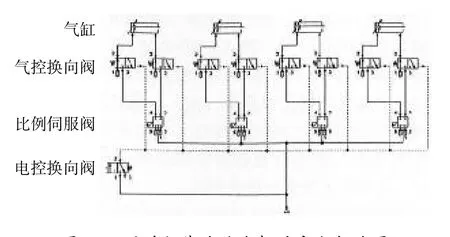
图3 4通道加载试验台架的安全气路图
3.3 气动执行机构
利用压缩空气驱动机构作直线运动、摇摆运动和旋转运动的元件,称为气动执行元件[6]。
可以采用以下方法来保证气动加载闭环试验控制系统执行机构的加载精度及平稳性:
(1)低温环境下试验时,在气缸上包裹电子加热装置,以保持一定的温度,防止气缸内部结冰。
(2)对于一些固定操作力的试验,可以通过在执行机构上串联砝码装置的形式来实现加载力。
(3)对于一些固定操作力的试验又不方便加砝码的时候,可以在执行机构上采用弹簧限力装置,用位移控制来保证力的精度。
3.4 传感器
传感器是气动加载闭环控制系统的主要信号。根据不同的试验要求,通过位置传感器,位移传感器,力传感器,扭矩传感器,速度传感器等反馈加载信号,检测试验及试件状态,记录加载曲线。
3.5 PLC控制逻辑
PLC是气动控制系统的大脑。PLC发出指令,使气动执行元件按照一定的控制逻辑运行。此处的控制逻辑是指PLC程序中的程序逻辑[5]。
图4是发明专利“气动力加载闭环控制装置及方法”中的控制方法流程图。这是一套独创而实用、性能稳定的控制算法,可以实现闭环自动调节。
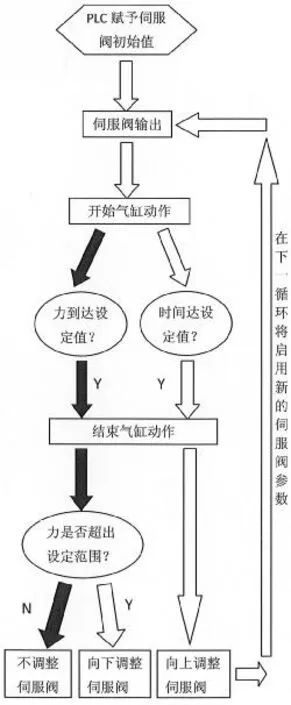
图4 控制流程图
逻辑说明:程序首次运行时,根据作用力设定值及气压值赋予比例阀一个初始值,这个值将决定气缸输出力的大小;然后设定结束气缸动作的条件:或作用力达到设定值,或时间到达设定值;在气缸结束动作后,根据结束气缸动作的条件来调整伺服阀的参数。如果是因时间达到设定值而结束气缸动作,说明作用力无法达到设定值,气缸压力偏小,则往上调整伺服阀参数;如果因作用力达到设定值而结束气缸动作,则比较该作用力数值是否超过设定的范围,如果超过,说明作用力偏大,则往下调整伺服阀的参数,如果作用力在设定的范围内,则保持伺服阀的参数不变。在下一个循环开始时,将新参数赋予伺服阀。经过一定的循环数后,程序将稳定在黑色箭头标记的流程内,即作用力数值稳定在设定的范围内。如果气压波动或试件状态改变,程序则继续进行调整,直到达到新的平衡。
应用举例:某发动机零件的疲劳耐久试验,需要进行一定次数的加载与释放,加载力为400 N。利用气动力加载闭环控制系统来完成此试验。伺服阀的输入信号为电流4~20mA,当控制器的输出电流为4~12mA时,伺服阀控制气缸缩回;当控制器的输出电流为12~20mA时,伺服阀控制气缸伸出。为使气缸快速回位,控制器将气缸缩回时的伺服阀值固定在4mA,该值对试验的加载没有影响,故不需要调节。控制器对控制气缸伸出的伺服阀值按前面所描述的流程进行控制。伺服阀初始值设定为16mA,作用力的设定值为395 N,作用力的稳定范围设定为395~405 N,时间设定值为5 s。程序运行后,气缸将进行加载与释放的动作;同时,程序在每个动作循环后,将按如下逻辑对伺服阀参数进行调节:
(1)如果时间先到达设定值5 s,说明作用力无法到达395 N,则下个循环必须将比例阀的电流往上调0.1mA;
(2)如果作用力先在5 s前到达规定值,并且大于405N,则在下个循环将比例阀的电流往下调0.1mA;如果作用力介于395~405N之间,则保持伺服阀的参数不变,程序进入稳定状态[3][6]。
3.6 人机界面
人机界面产品,即触摸屏,有HMI硬件和相应的专用画面编辑软件。一般情况下,不同厂商的HMI硬件使用不同的画面编辑软件,主要连接设备种类是PLC[7]。
根据多年的试验经验,设计了一套操作方便的人机界面。试验人员无需调节各种参数,无需进行特殊培训,只需按要求输入目标值,其它由程序自动处理。
图5是某零件的气动力加载闭环试验控制系统界面。试验人员可以对1号通道(即1号气缸)和2号通道(即2号气缸)进行独立控制。在目标力输入框内输入加载力,次数设定输入框内输入试验次数,然后按下开始按钮,程序将自动运行。

图5 某零件的气动力加载闭环试验控制系统界面
4 结束语
从气源,气动控制元件,气动执行机构,传感器,控制逻辑及人机界面等方面,对气动力加载闭环试验控制系统进行了研究。经过多个项目的实际验证,该方法用于气动控制的汽车零部件耐久试验台架,效果明显,控制稳定、操作方便。本研究对气动力加载控制系统的搭建具有指导意义。根据不同的试验要求,适当调整控制逻辑及算法,气动力加载控制系统就可用于更多的试验台架。
[1]SMC(中国)有限公司.现代实用气动技术[M].北京:机械工业出版社,2008.
[2]吴晓明.现代气动元件与系统[M].北京:化学工业出版社,2014.
[3]杨志永.气动力加载闭环控制装置及方法:中国,10411076.9[P].2014-04-09.
[4]翟秀慧.气动与液压技术基本功[M].北京:人民邮电出版社,2011.
[5]陶国良,刘昊.气动电子技术[M].机械工业出版社,2014.
[6]SIMATIC S7-200可编程序控制器系统手册[G].北京:西门子(中国)有限公司,2000.
[7]魏克新.自动控制综合应用技术[M].北京:机械工业出版社,2012.
Research on Closed-loop Pneumatic Loading System For Test
Yang Zhiyong,Ma Zhagen
(ShanghaiVolkswagen Co.,Ltd.,Shanghai,201805)
Having low cost,no pollution and low energy consumption,pneumatic control system has been amainmeans forautomotive partsdurability test.However,because of the compressible characteristics ofair,the pneumatic controlsystem can'tmeet the test requirementson loading stability.Thispaper presents a research on the stable controlofpneumatic controlsystem from perspectivesofcompression air,pneumatic controlunits,pneumatic actuators,sensors,controlmethod andman-machine interface.
pneumatic control,loading,closed-loop,automotive parts,durability test
10.3969/j.issn.1671-0614.2017.04.010
来稿日期:2017-04-07
杨志永(1978-),男,工程师,主要研究方向为汽车零部件试验。