不同定子磁链幅值给定下的永磁同步电机直接转矩控制
2017-12-22樊明迪谢门喜
樊明迪,杨 阳,杨 勇,谢门喜
(1.苏州大学 轨道交通学院,江苏 苏州,215131;2.海工英派尔工程有限公司,山东 青岛,266101)
不同定子磁链幅值给定下的永磁同步电机直接转矩控制
樊明迪1,杨 阳2,杨 勇1,谢门喜1
(1.苏州大学 轨道交通学院,江苏 苏州,215131;2.海工英派尔工程有限公司,山东 青岛,266101)
永磁同步电机直接转矩控制最常见的控制策略是定子磁链幅值恒定,而且通常情况下其大小等于永磁体磁链幅值。文中不仅对定子磁链幅值恒定进行了分析,还阐述了另外几种直接转矩控制的定子磁链给定策略,比如最大转矩电流比控制、单位功率因数控制和最大效率控制。基于永磁同步电机直接转矩控制的原理,文中逐步推导了这4种控制策略,并分析了它们的转矩控制的稳定性,提出了通过限制转矩最大值来限制电机定子电流的方法。Matlab/Simulink 的仿真结果分别验证了控制策略的正确性。
永磁同步电机;直接转矩控制; 最大转矩电流比; 单位功率因数; 最大效率
在交流传动中,永磁同步电机在航空、航天、数控机床、机器人、电动汽车的高性能领域应用广泛。这主要得益于其优异的性能指标,比如高转矩电流比、高功率密度、高效率、高功率因数、高可靠性等。
目前,永磁同步电机最主流的控制方法有两种,VC(Vector Control)矢量控制和DTC(Direct Torque Control)直接转矩控制。矢量控制是 Blaschke于1972年为异步电机控制发明的,也称为FOC(Field Oriented Control)磁场定向控制[1];Takahashi和Depenbrock等于上世纪80年代发明了直接转矩控制,也是用于异步电机控制[2-3]。鉴于两种控制方法在异步电机应用中都取得了令人满意的效果,所以二者均推广到了永磁同步电机的应用中,且二者都具有优异的动静态性能。
永磁同步电机矢量控制在基速以下,一般采用以下控制策略,CSFM(Constant Stator Flux Magnitude)定子磁链幅值恒定[4]、MTPA(Maximum Torque per Ampere)最大转矩电流比[5-6]、UPF(Unity Power Factor)单位功率因数[7-9]以及ME(Maximum Efficiency)最大效率[10-11]。与矢量控制相比,直接转矩控制无需PWM变换器,对参数和干扰的鲁棒性强,无需旋转坐标变换(只需要转子位置区间信息辅助查表),直接转矩控制最显著的特点是其动态性能特别优异[12-13]。
传统的直接转矩控制,其定子磁链幅值给定通常是常值,大小等于永磁体磁链的幅值[14]。近几年,随着永磁同步电机直接转矩控制的不断发展,在工业应用中,新的控制策略也开始得到了应用,如MTPA[15-17]、UPF 以及 ME[16]。
基于永磁同步电机直接转矩控制的原理,文中叙述了CSFM、MTPA、UPF以及 ME四种控制策略。直接转矩控制需要两个输入,转矩给定和定子磁链幅值给定。四种控制策略的实现便是依靠改变定子磁链幅值大小,而且,还需要结合转矩给定值实时调整。直接转矩控制原有的控制结构均保留不变,滞环比较器的输入依然是转矩误差和定子磁链幅值误差,滞环比较器的输出从表格中选择合适的电压矢量,通过电压源型逆变器施加被选择的电压矢量到永磁同步电机定子端。
1 数学模型
为了简化且不失一般性,论文以SPMSM(Surface Mounted Permanent Magnet Synchronous Motor)面装式永磁同步电机作为研究对象。文中假设条件如下: 1)磁场呈正弦波分布,不考虑谐波与饱和;2)定子绕组星形连接,绕组电流为对称的三相正弦波电流;3)转子无阻尼绕组;4)不考虑电机的磁滞和涡流损耗。在此假设的基础上,SPMSM在定子坐标系下的数学模型为:

(1)
ψs=Lsis+ψf
(2)

(3)

(4)
式中:us是定子电压矢量,is是定子电流矢量,ψs定子磁链矢量,ψf永磁体磁链矢量,Rs定子电阻,Ls是定子电感(对于SPMSM:Ld=Lq=Ls),Es是定子反电动势,Lsdis/dt是感应电动势(Esi),jωeψs旋转电动势(Esm),p是极对数,Te电磁转矩,δ是负载角,ωe电气旋转角速度。注意,对于直接转矩控制,只要定子磁链幅值和负载角可以控制好,那么电磁转矩便可以控制好。
永磁同步电机直接转矩控制框图如图1所示。图1中,所有的变量均在αβ两相静止坐标系下得到的,永磁同步电机的实现过程可描述如下:
电磁转矩的给定值一般由有速度外环的输出或者用户设置确定;
定子磁链幅值给定值根据控制策略的不同而不同;
通过定子电流、定子电压和转子初始位置可以估计定子磁链幅值和电磁转矩的真实值;
转矩滞环比较器的输入是转矩给定值和真实值的差值,磁链滞环比较器的输入是定子磁链幅值给定值与真实值的差值;
合适的电压矢量是根据两个滞环比较器的输出,从开关表格[2,14]中选择的;
通过电压源性逆变器可以将所选的电压矢量施加到电机定子端,电机的电磁转矩得到控制。
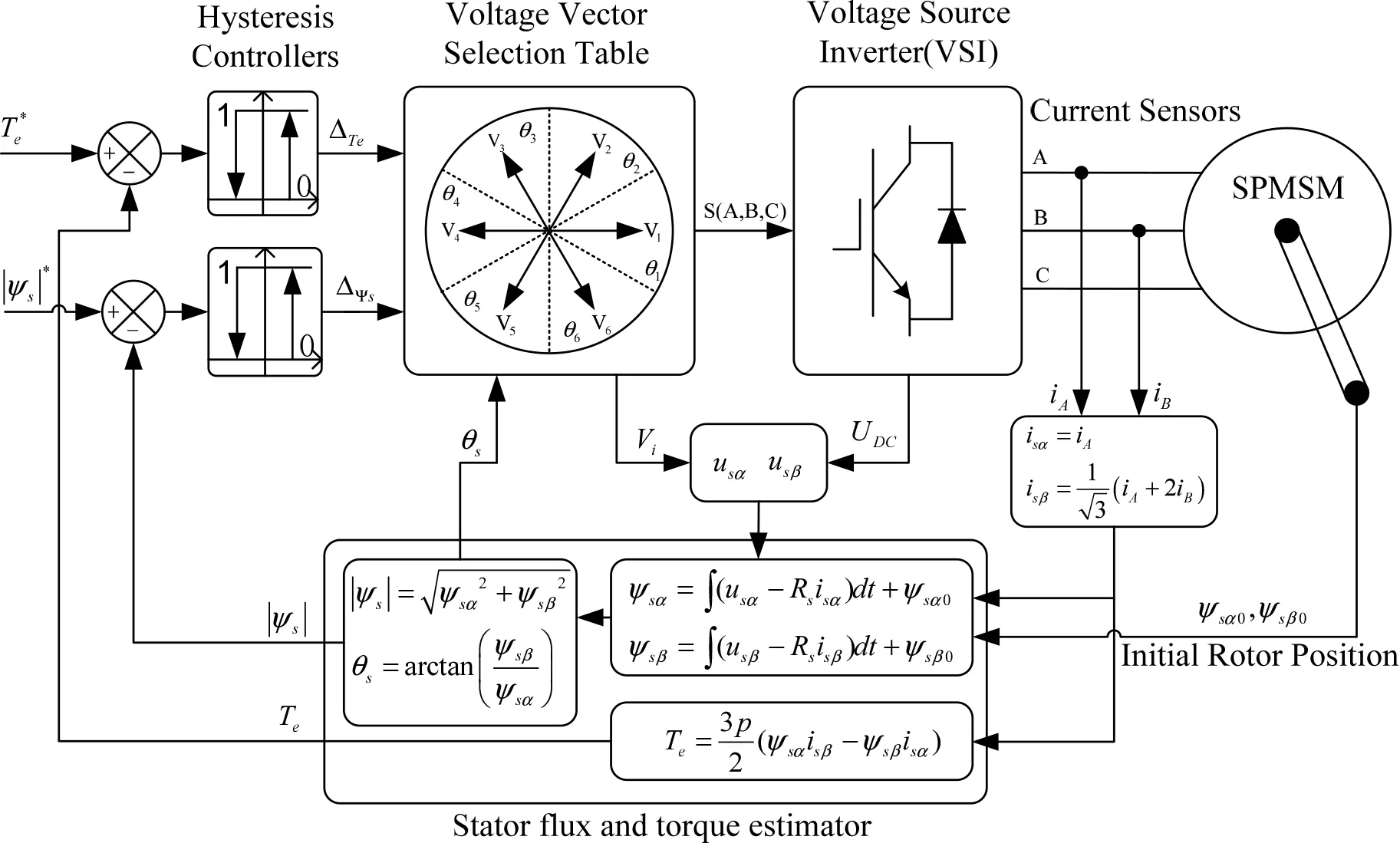
图1 SPMSM-DTC控制框图[14]Fig.1 SPMSM-DTC control diagram
2 控制策略
基于前文所述的直接转矩控制原理,本节主要阐述四种实现直接转矩控制的控制策略,分别为CSFM、MTPA、UPF以及ME。通过调节定子磁链幅值给定值,可以实现这四种控制策略。定子磁链幅值的给定值是直接转矩控制两个输入中的一个,其另外一个输入是转矩给定值,通常情况下,转矩给定值由用户设置或者是等于速度外环的输出值。
不同的控制策略在不同的应用中有着各自的重要性。例如,CSFM可以在恒转矩区域平滑调速,而且通过很小的调整就可以实现弱磁调速;与之相似UPF和ME在对节能和经济性要求比较高的居家应用中应用广泛,比如风扇、水泵、混合电动汽车和纯电动汽车等[4]。这四种控制策略的推导过程及其转矩控制稳定性将在本节中进行叙述。为简化起见,在文章中,温度对电机的影响因素暂且忽略,永磁体磁链幅值视为常值。
2.1 CSFM定子磁链幅值恒定控制
定子磁链幅值恒定控制策略的主要优点是通过限制幅值大小,可以使电机对定子电压的需求降低[4]。
定子磁链幅值给定值 |ψs|*可以写成:
|ψs|*=|ψf|
(5)
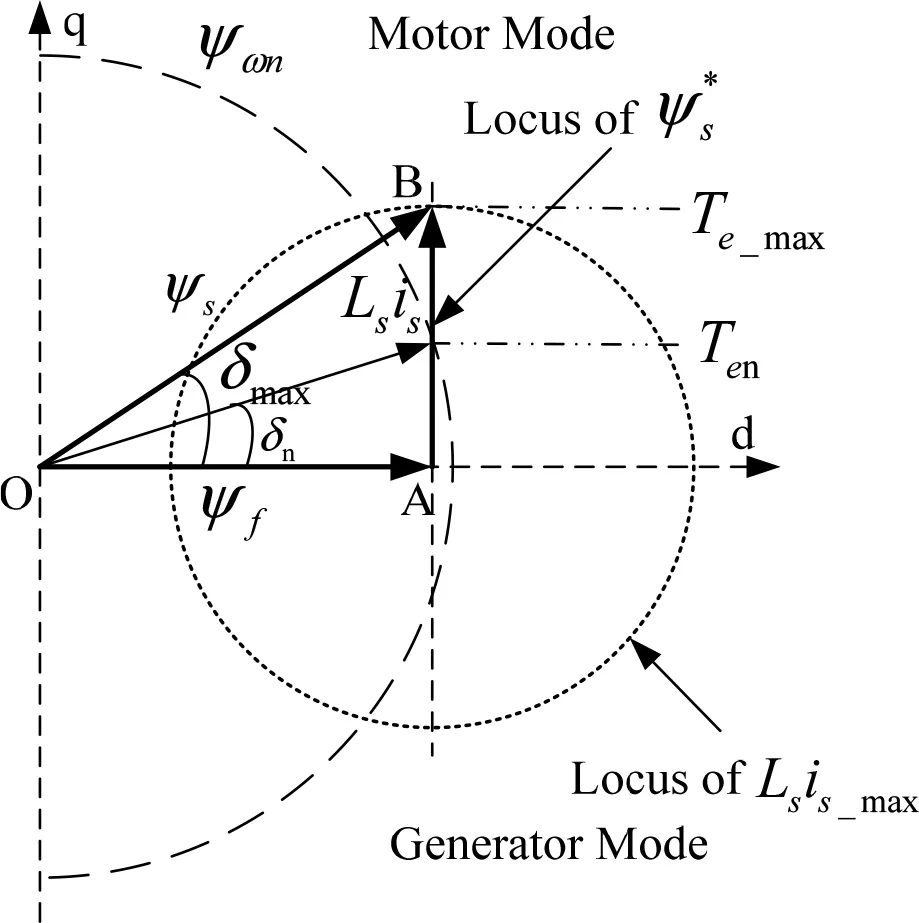
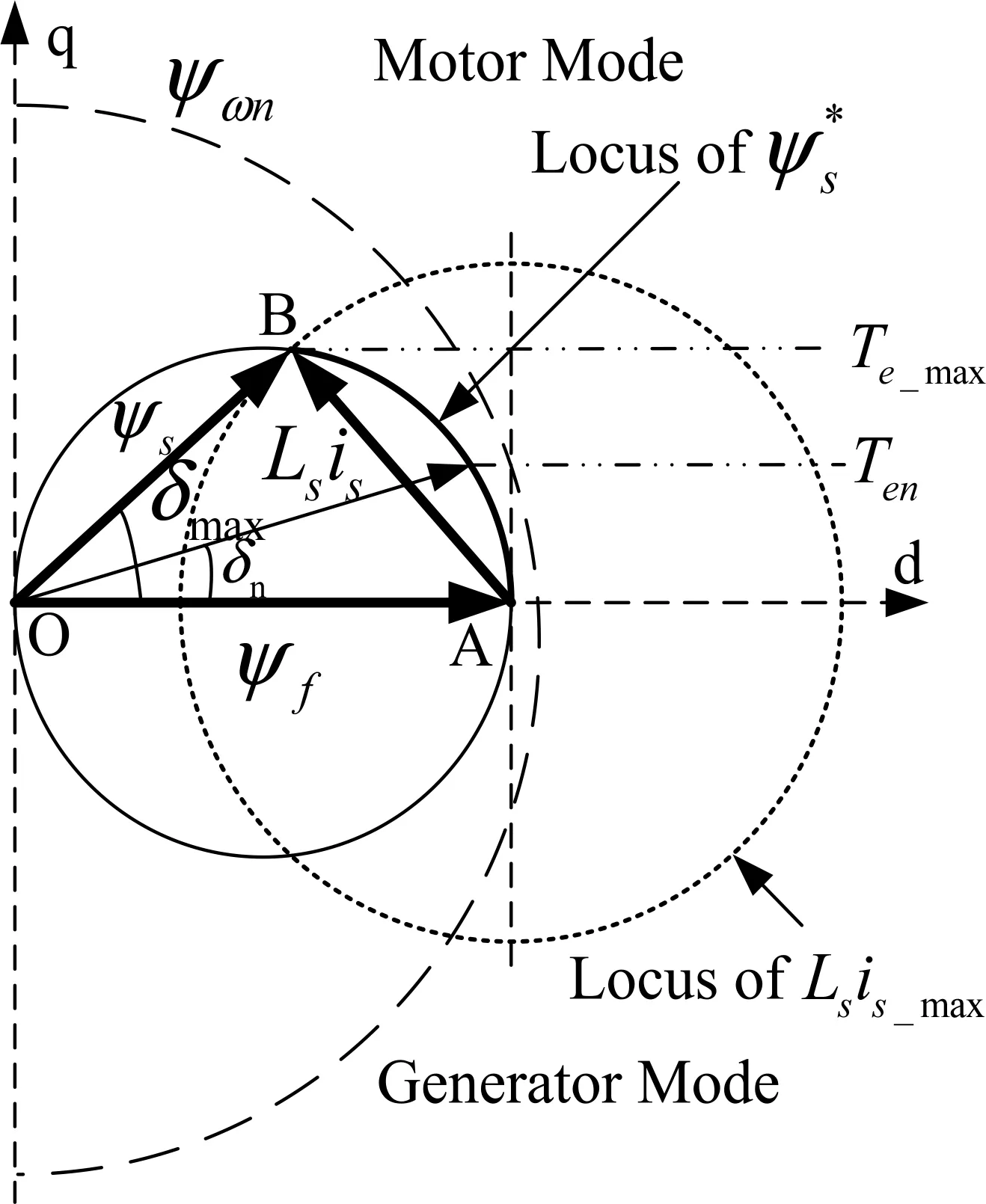
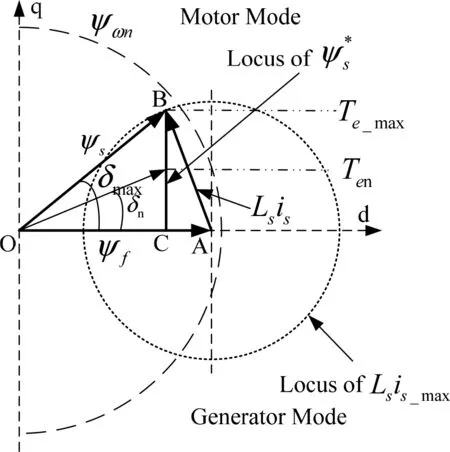
定子磁链矢量在dq两相旋转坐标系下的运行轨迹如图2所示。图中,永磁体磁链矢量ψf的起点和终点分别为O和A,定子绕组所允许流过的最大电流为is_max,定子电流极限圆Lsis_max便是以A为圆心,以Ls|is_max|为半径画出来的,定子磁链幅值恒定下的磁链给定轨迹便是以A为圆心,以OA为半径作圆得到的。B是定子磁链给定轨迹圆与定子电流极限圆的其中一个交点,ψωn为额定转速下的电压极限圆,是转子速度为额定转速时的定子磁链轨迹,当定子磁链幅值在ψωn内部时,电机转速可以工作可以一定程度上高于额定转速,定子磁链幅值越小,所对应的电机的极限转速越高,Ten和Te_max分别对应电磁转矩额定值和最大值,同样,δn和δmax分别是负载角的额定值和最大值。由此可以得到,在图2中,弧A-B 是CSFM转矩控制稳定运行的轨迹区间。
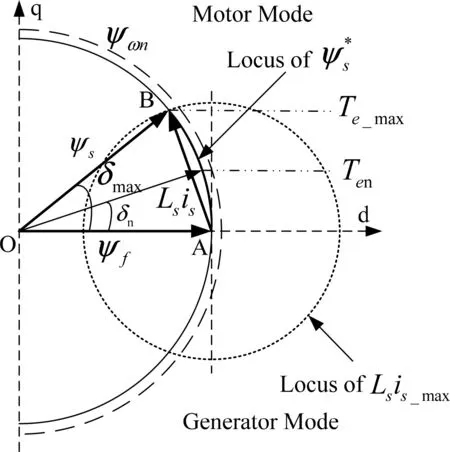
图2 CSFM下定子磁链运行轨迹图Fig.2 Locus of the stator flux vector with CSFM
负载角δ的大小可以通过圆周角定理来计算。圆周角定理指的是:同一段圆弧所对应的圆周角的大小等于圆心角的一半,直径所对的圆周角为90°,这是圆周角定理的一种特殊情况,称为Thales定理[18]。根据该定理,在CSFM控制策略下的负载角最大值δmax可由下式给出:
δmax=2arcsin(Ka/2)
(6)
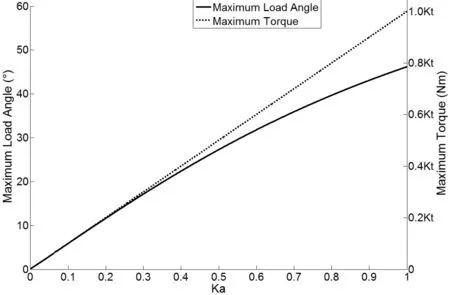
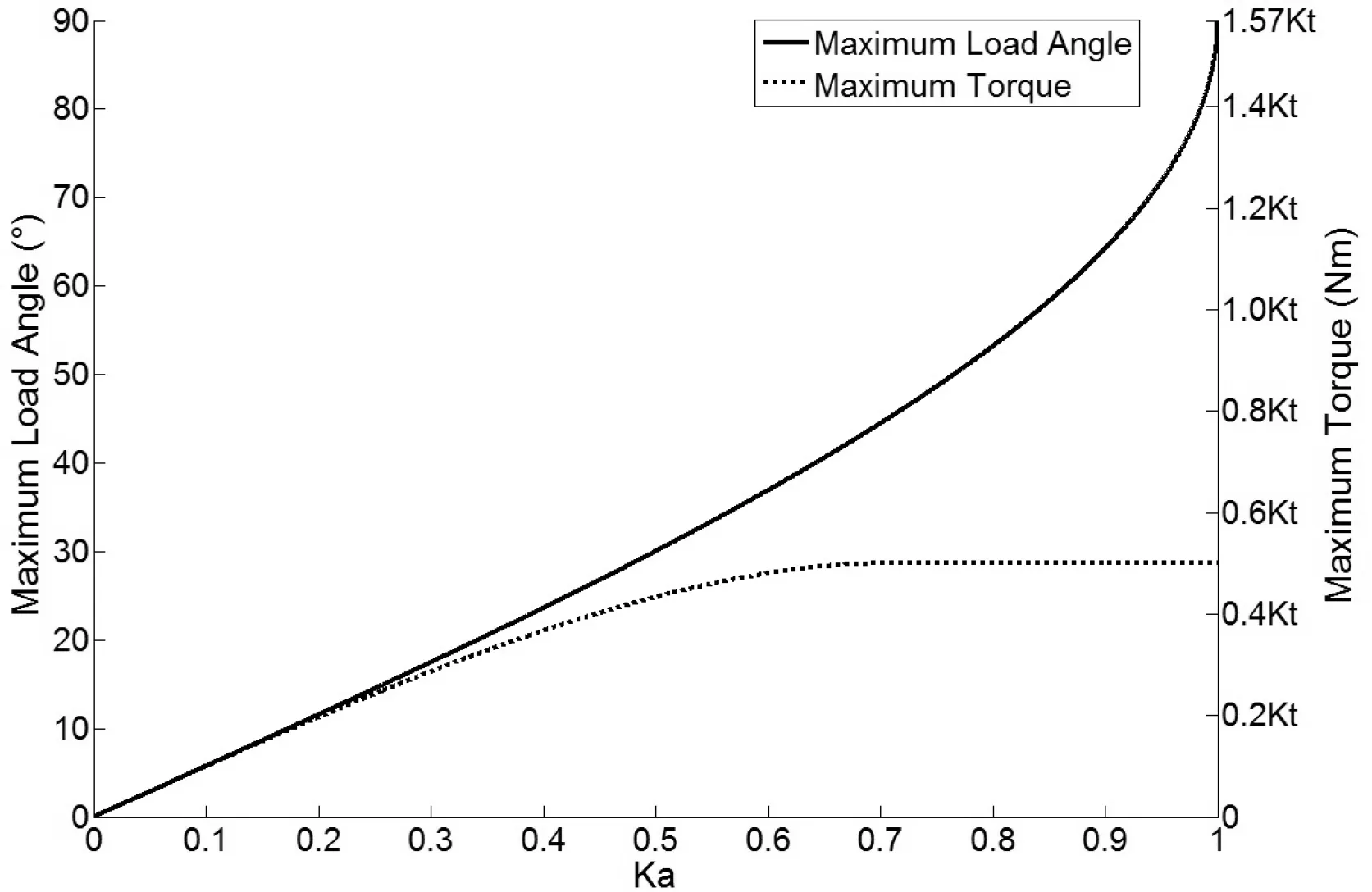
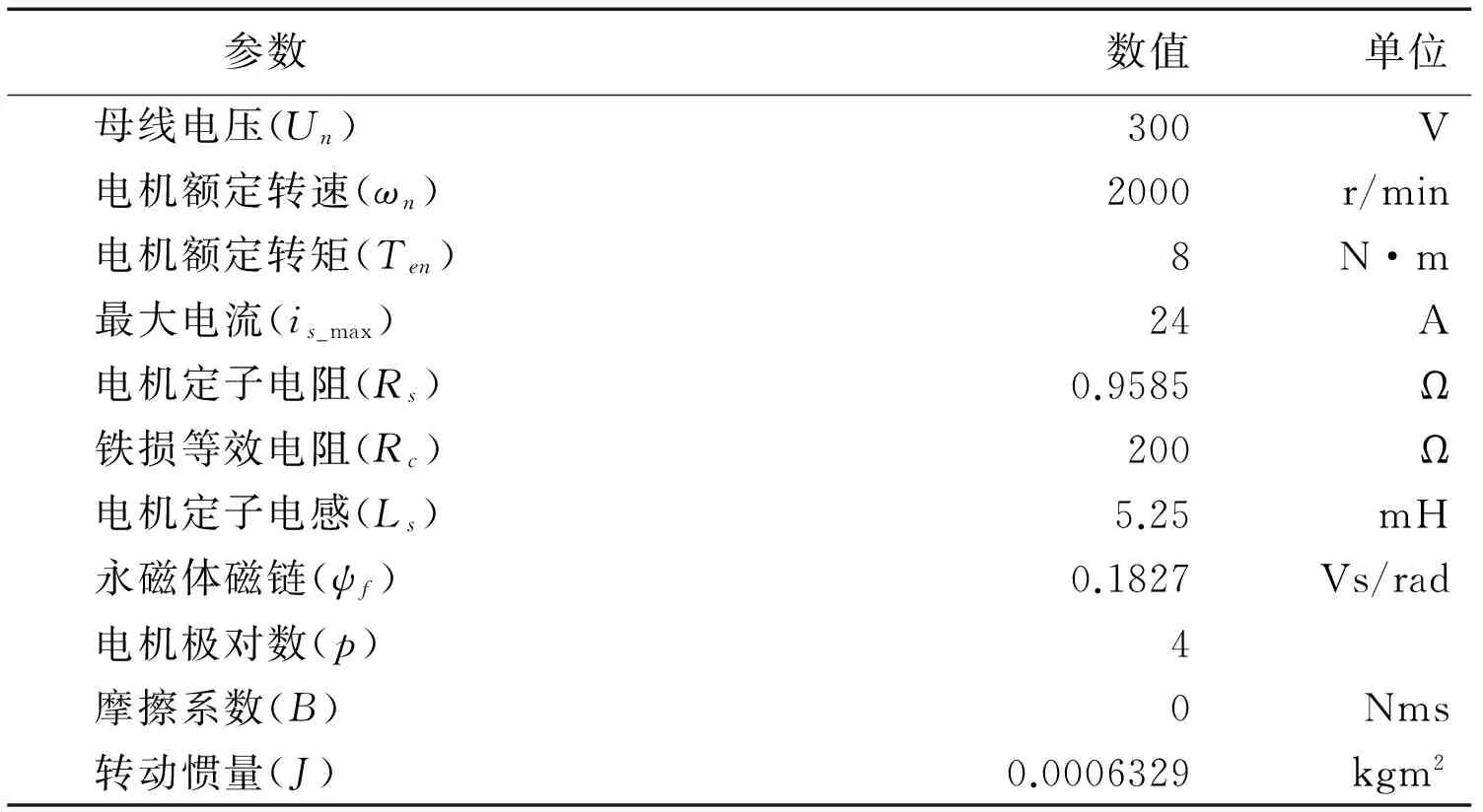
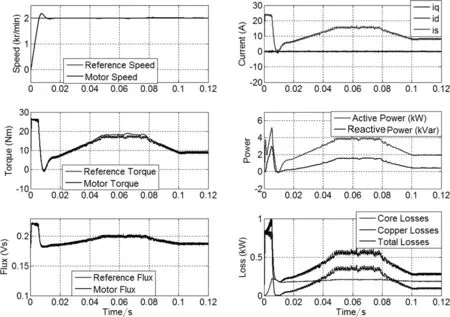
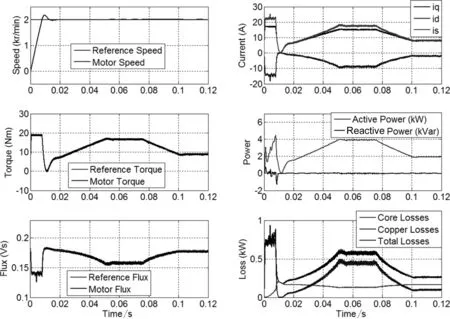
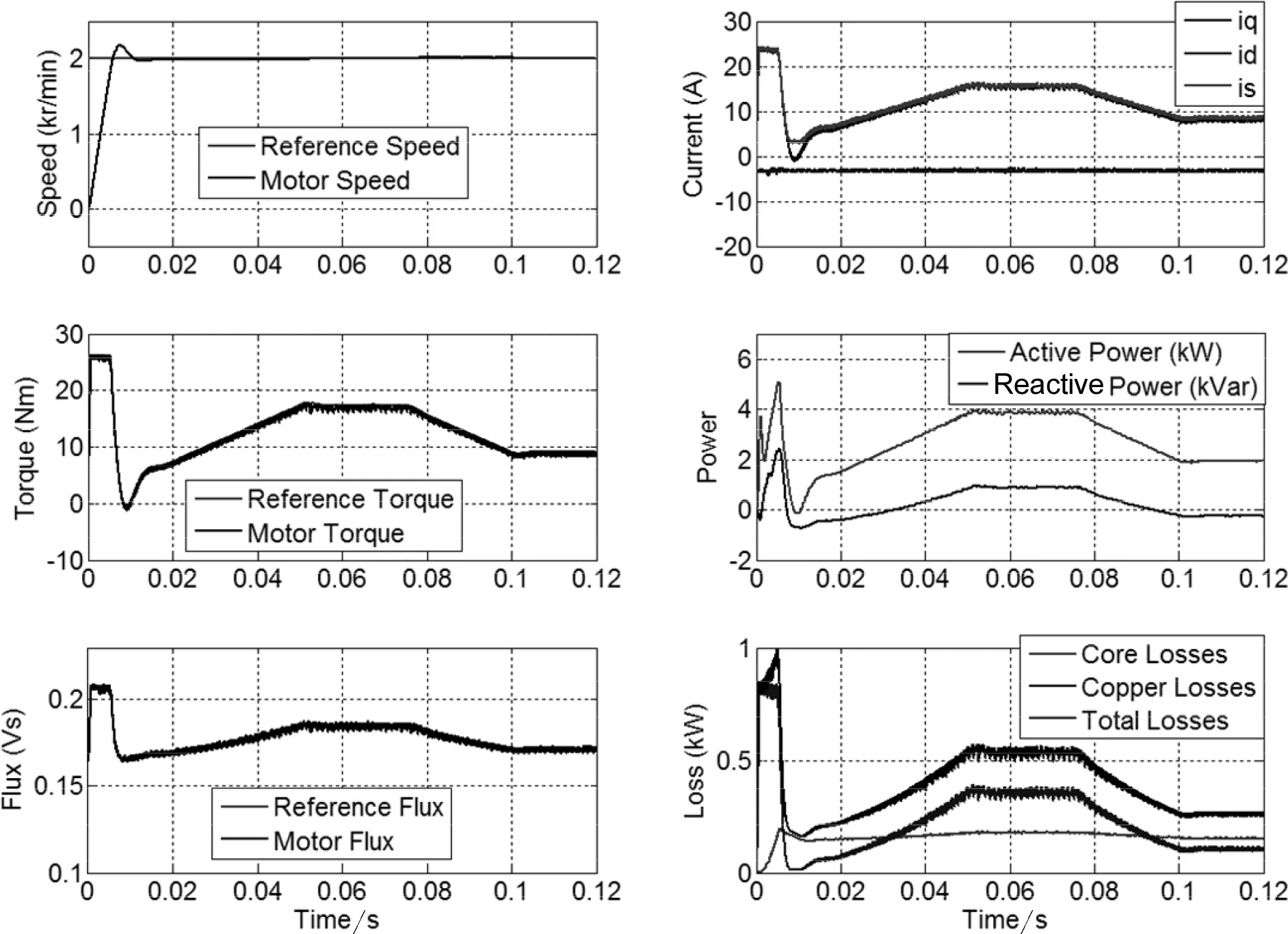
式中:Ka=Ls|is_max|/|ψf|是δmax的相关系数,(对于SPMSM,0 Te_max=Ktsinδmax (7) 式中Kt=1.5p|ψf|2/Ls是Te_max的相关系数。 图3给出的是CSFM控制下,δmax和Te_max随着Ka变化而变化的曲线,可知当Ka=1时,δmax可以达到60°,故,想要得到一个稳定的转矩控制,Te_max应当小于Ktsin60°=0.866Kt。实际上,SPMSM的Ka值在电机设计结束以后便确定了,所以,δmax和Te_max值可以在电机设计结束后根据通过公式(6)和公式(7)计算得到。在设置电磁转矩给定值时,令其不超过Te_max,可保证SPMSM的转矩控制运行稳定。另外,通过改变CSFM中的定子磁链幅值大小,可以很方便、直接地使SPMSM运行在弱磁调速段。 图3 CSFM控制策略下的负载角和转矩最大值Fig.3 The maximum load angle and electromagnetic torque of CSFM 矢量控制中,最大转矩电流比的控制策略使用广泛,因此,学者们也在研究如何将之应用到直接转矩控制中[4]。MTPA控制策略在单位电流下得到更大的力矩,同时降低电机的铜损,对于面装式永磁同步电机来说,id=0控制与最大转矩电流比的控制策略是一致的。 图4 MTPA下定子磁链运行轨迹图Fig.4 Locus of the stator flux vector with MTPA 通过控制定子磁链幅值给定值,可以实现直接转矩控制的MTPA控制策略,如下式所示: (8) 图4中给出了定子磁链矢量在MTPA控制下的运行轨迹。图4中,线段A-B 是MTPA控制策略下转矩可稳定运行的轨迹区间。 根据图4,可以得到MTPA控制下δmax为: δmax=arctanKa (9) 再结合公式(4)和公式(5),转矩最大值Te_max可以表示为: Te_max=Kttanδmax (10) 图5给出的是MTPA控制策略下δmax和Te_max分别随着参数Kδ变化的变化曲线,可以注意到的是,当Ka=1 时,δmax可以达到 45°,所以想要令转矩稳定运行,Te_max需要小于Kt·tan45°,δmax和Te_max便可以由式(9)和式(10)计算得到。控制过程中,将电磁转矩给定值限制在Te_max,便可以限制住定子电流,使其不超过is_max。 图5 MTPA控制策略下的负载角和转矩最大值Fig.5 The maximum load angle and electromagnetic torque of MTPA 由于反电动势矢量Es超前定子磁链ψs矢量90°,通过控制定子电流矢量is,使其同样超前定子磁链矢量ψs90°,那么定子电流矢量is便与反电动势矢量Es同向。通常定子电阻Rs的影响可以忽略,这也就是说,反电动势幅值与定子端电压值可近似认为相等,且二者之间相位为零,由于矢量is与Es同向,也就是功率因数角φ为零,此时,电机运行在单位功率因数控制策略下[4]。 定子磁链矢量ψs是Lsis和ψf两者的合成矢量,所以若要控制磁链角θψi在90°,定子磁链的幅值给定应为: (11) 定子磁链矢量在UPF控制策略下,在dq坐标系下的运行轨迹见图6。在图6中,弧A-B是该控制下转矩稳定轨迹区间。 图6 UPF下定子磁链运行轨迹图Fig.6 Locus of the stator flux vector with UPF 根据圆周角理论,UPF下的负载角最大值δmax可以表示为 δmax=arcsinKa (12) UPF下, 电磁转矩最大值Te_max的表达式可以写为: (13) 图7 UPF控制策略下的负载角和转矩最大值Fig.7 The maximum load angle and electromagnetic torque of UPF 图7给出的是UPF-DTC下δmax和Te_max分别随着参数Kδ变化的变化曲线。图中,Te_max在0.707≤Ka≤1时都等于0.5Kt,δmax和Te_max便可以分别由公式(12)和公式(13)计算得到,在进行控制时,需要将电磁转矩给定值限制在Te_max,这样,便可以使得定子电流得到限制,使其不超过is_max。 有一些应用场景,需要损耗最小化,这就特别需要最大效率控制(ME),例如:采暖、空调、烘干机、冰柜、冰箱、电动工具、吸尘器等[4]。 在本节中,忽略机械损耗和杂散损耗,仅考虑可以通过控制策略优化的电气损耗,这部分损耗记为Ploss,包括铜损PCu和铁损PFe,可以描述为[4]: (14) 式中Rc是铁损等效电阻,为了分析Ploss和 |ψs|的关系,公式 (14) 可以用|ψs|和Ls|is|来表示: (15) 故,能够使功率损耗最小的|ψs|*为: (16) 图8 ME下定子磁链运行轨迹图Fig.8 Locus of the stator flux vector with ME 图8给出的是,在ME控制策略下,ψs在dq坐标系下的运行轨迹,线段C-B是该控制下转矩稳定轨迹区间。 ME下的δmax为: (17) ME下的Te_max为: (18) 一台电机的Ka和λ在设计结束之后,便成了常数,δmax和Te_max便可以分别根据公式(17)和公式(18)计算得到,如果需要限制电流的大小,需要限制电磁转矩给定值,使其不大于Te_max。 为了验证永磁同步电机直接转矩控制四种控制策略的正确性。此文利用Matlab/Simulink建立了仿真模型,四种控制策略在同一仿真环境下运行,SPMSM是星形连接,其参数见表1。 电压源型逆变器采用的是IGBT器件,直流母线电压为 -150V到+150V。开关频率最大值为20 kHz。离散采样时间为10μs,转矩和磁链滞环比较器带宽分别为0.8N·m和0.003Vs。 表1 仿真参数Table 1 Parameters of SPMSM used for simulation 根据表1中电机的参数,可得相关系数Ka= 0.6897,Kt=38.1470,λ=0.9083。为了获得一个稳定的转矩控制,考虑前文的分析,转矩给定值最大值为Te_max,CSFM、MTPA、UPF和ME控制下的Te_max可以由公式 (7)、公式(10)、公式(13)以及公式(18)分别计算。 四种控制策略下的仿真结果如图9至图12所示,仿真是在2000r/min的速度闭环下进行的,负载转矩范围是0~16N·m,负载转矩变化率320Nm/s。 图9 CSFM控制下的仿真结果Fig.9 Steady state performance of CSFM 图9中最典型的特点为:定子磁链的幅值为恒值。 图10 MTPA控制下的仿真结果Fig.10 Steady state performance of MTPA 图10中最典型的特点为:d轴电流始终为零。 图11 UPF控制下的仿真结果Fig.11 Steady state performance of UPF 图11中最典型的特点为:无功功率始终为零。 图12 ME控制下的仿真结果Fig.12 Steady state performance of ME 四种控制策略在额定转速和额定转矩条件下的功率和效率结果如表2所示,在表2中,P是有功功率,Q是无功功率,S是视在功率,η是效率,TpA是转矩电流比。 表2 功率和效率结果(2000r/min,8N·m)Table 2 Power and efficient results (2000r/min,8N·m) 随着电力电子技术和现代控制理论的不断发展,DTC以其优异的转矩动态响应得到了越来越多电气工程师们的喜爱。文中叙述了永磁同步电机直接转矩控制的4种控制策略,它们都可以通过改变定子磁链幅值给定来实现,而且,这四种控制策略无需硬件改变,只需要在软件里做较小的修改即可,更为重要的是,控制策略的改变并不会损失DTC的动态性能。另外,文中还分析了转矩的稳定运行区间,给出了一种通过限制电磁转矩设定值的方式实现定子电流限制的方法。仿真结果验证了各种控制策略的正确性。 [1]BLASCHKE F.The principle of field-orientation as applied to the new TRANSVEKTOR closed-loop control system for rotating field machines [J].Siemens Review,1972,34:217-220. [2]TAKAHASHI I,NOGUCHI T.A new quick-response and high-efficiency control strategy of an induction motor [J].IEEE Transactions on Industry Application,1986,22(5):820-827. [3]DEPENBROCK M.Direct self-control (DSC) of inverter-fed induction machine [J].IEEE Transactions on Power Electronics,1988,3(4):420-429. [4]KRISHNAN R.Permanent magnet synchronous and brushless DC motor drives [M].Boca Raton:Taylor & Francis Group,2010. [5]SUNGMIN KIM,YOUNG-DOO Yoon,SEUNG-KI Sul,et al.Maximum Torque per Ampere (MTPA) Control of an IPM Machine Based on Signal Injection Considering Inductance Saturation [J].IEEE Transactions on Power Electronics,2013,28(1):488-497. [6]KWANG-WOON L,SANG BIN LEE.MTPA operating point tracking control scheme for vector controlled PMSM drives [C]//Power Electronics Electrical Drives Automation and Motion (SPEEDAM),2010. [7]LIU WL,ZHANG GZ.Unity Power Factor Control of Permanent Magnet Synchronous Motor [J].Micromotors.2012,45(2):63-67. [8]Pham D C,et al.Unity power factor control in sensorless PMSM drive systems:A DSP-based implementation approach [J].ICIC Express Letters,Part B:Applications,2012,3(2):383-388. [9]WU F,WAN SM,HUANG SH.Unity power factor control for PMSM position sensor-less drive [C]//11th International Conference on Electrical Machines and Systems,ICEMS 2008,Wuhan,China.2008:1618-1620. [10]POHLENZ D,Bocker J.Efficiency improvement of an IPMSM using Maximum Efficiency operating strategy [C]//Power Electronics and Motion Control Conference (EPE/PEMC),2010. [11]MEIFEN C,HOSHI N.Electrical loss minimization strategy for interior permanent magnet synchronous motor drives [C]//Vehicle Power and Propulsion Conference (VPPC),2010. [12]DWIVEDI S,SINGH B.Vector control Vs Direct Torque Control comparative evaluation for PMSM drive [C]//2010 Joint International Conference on Power Electronics,Drives and Energy Systems,PEDES 2010 and 2010 Power India.New Delhi,India,2010. [13]WANG Y,CHENG Q,CHENG Y,et al.Simulation research on speed sensorless direct torque control system based on MRAS [J].Journal of Computational Information Systems,2011,7(9):3070-3076. [14]OZTURK S B.Direct torque control of permanent magnet synchronous motors with non-sinusoidal back-EMF [D].United States:Texas A&M University,2008. [15]HOANG,K D,et al.Online optimized stator flux reference approximation for maximum torque per ampere operation of interior permanent magnet machine drive under direct torque control [C]//6th IET International Conference on Power Electronics,Machines and Drives,PEMD 2012,Bristol,United kingdom,2012. [16]LUUKKO J,J Pyrhonen.Selection of the flux linkage reference in a direct torque controlled permanent magnet synchronous motor drive [C]//Advanced Motion Control,AMC 1998,Coimbra,1998. [17]JINYUN Y,et al.Direct torque control combined with MTPA concept for open winding IPMSM [C]//Electrical Machines and Systems (ICEMS),2012. [18]WEISSTEIN Eric W.“Thales’ Theorem”[DB/OL].[2017-12-07]. http://mathworld.wolfram.com/ThalesTheorem.html ControlStrategiesofDirectTorqueControlforPermanentMagnetSynchronousMotorunderVariousStatorFluxReference FAN Mingdi1,YANG Yang2,YANG Yong1,XIE Menxi1 (1.School of Rail Transportation,Soochow University,Suzhou 215131,China 2.COOEC Enpal Engineering Co.Ltd.,Qingdao 266101,China) direct torque control; maximum torque per ampere; permanent magnet synchronous motor; unity power factor; maximum efficiency 1672-7010(2017)06-0032-11 TM320.1 A 2017-09-22 国家自然科学青年基金资助项目(51407124,51707127);中国博士后科学基金资助项目(2015M581857);江苏省博士后科研资助计划(1601109B);江苏省高校自然科学研究面上项目(15KJD470005);苏州市前瞻性应用研究项目(SYG201640) 樊明迪(1987-),男,山东人,博士,博士后,从事电力电子与电力传动研究;杨阳(1990-),男,学士,从事电机控制与电力电子应用技术研究;E-mail:yangyang40@cnooc.com.cn 杨勇(1981-),男,博士,博士后,从事光伏发电、风力发电及微电网控制研究;E-mail:yangy1981@suda.edu.cn Received:The control strategy of the traditional direct torque control (DTC) for permanent magnet synchronous motors (PMSMs) is constant stator flux magnitude,and most usually the stator flux magnitude is maintained at a value equal to the rotor flux magnitude.In this paper,other control strategies of DTC which can be realized based on variable stator flux linkage are presented,such as maximum torque per ampere,unity power factor and maximum efficiency.Based on the principle of DTC for PMSMs,these control strategies are derived step by step and the torque control stability is analyzed in this paper.In Simulink environment,the correctness of these control strategies was validated.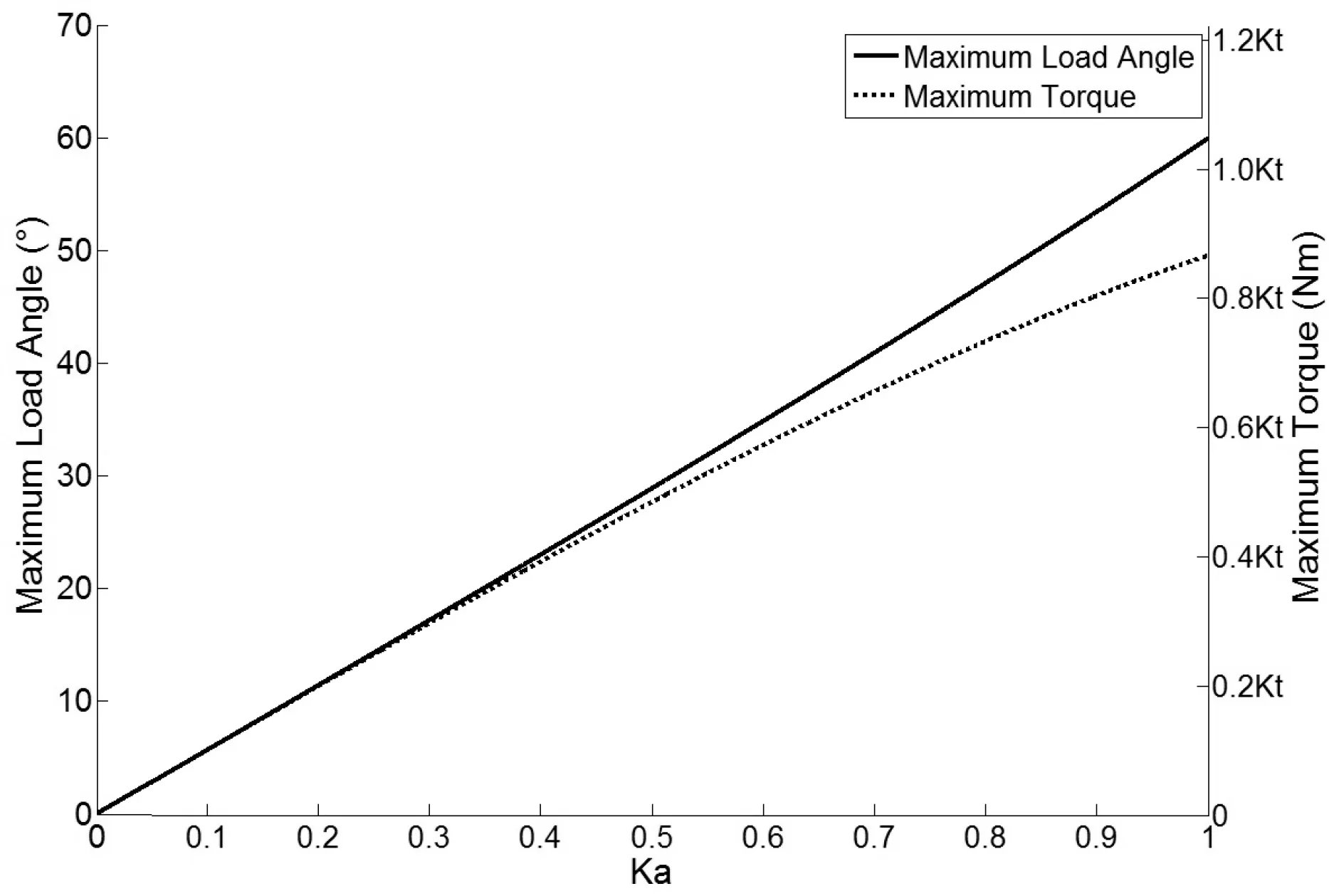
2.2 MTPA最大转矩电流比控制

2.3 UPF单位功率因数控制

2.4 ME最大效率控制


3 仿真


4 结论
