SSSC阻尼系统功率振荡的控制器设计
2017-12-21李娟赵磊
李娟,赵磊
(东北电力大学 电气工程学院,吉林吉林132012)
0 引 言
由于柔性交流输电系统(FACTS)反应快的特点,已经被广泛的应用到潮流控制中。FACTS控制器的使用可提供无功补偿,电压调节,抑制阻尼振荡等功能[1-3]。大多数含有半导体器件的电压源转换器的FACTS装置,如UPFC,SSSC等在速度方面有更大优势[4]。静态同步串联补偿器(SSSC)是串联的FACTS器件中的一个,已经广泛应用于改善电力系统动态响应的研究中[5]。SSSC为提高输电线路的传输能力、提高系统的稳定性提供了比较经济的解决方案[6-7]。在文献中,很多优化方法已经应用到SSSC的功率振荡阻尼控制器的设计中。例如,文献[8]使用萤火虫优化算法设计SSSC阻尼控制器,虽然它能够起到阻尼控制器的作用,但是在优化算法中使用了网格搜索,可能出现数据冗余。而人工蜂群算法以适应度作为优化的依据,具有操作简单、搜索精度较高和鲁棒性较强等优点。
文章在介绍SSSC的工作原理的基础上建立含有SSSC的单机系统动态数学模型,以实现阻尼系统功率振荡为目的,推导SSSC逆变器脉冲宽度调制系数变化量与系统电角速度变化量之间的关系,从而得到SSSC的控制系统传递函数,通过人工蜂群算法优化控制系统的参数来控制SSSC输出电压从而提高单机无穷大系统的动态性能,抑制功率振荡。
1 SSSC电力系统的数学模型
串有SSSC的单机无穷大系统的结构示意图如图1所示。静止同步串联补偿器的基本原理是向线路注入一个与线路电流正交的可控电压,并且与线路电流无关,大小由逆变器的调制系数m控制,以此控制线路的传输功率。
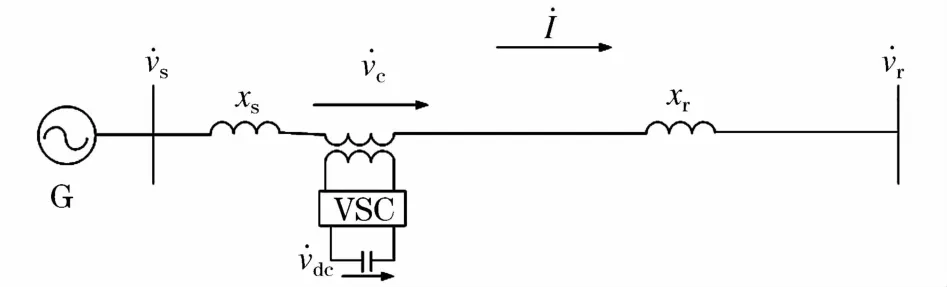
图1 含有SSSC的单机无穷大系统Fig.1 A single infinite system containing SSSC
单机无限大系统的非线性动态方程为:
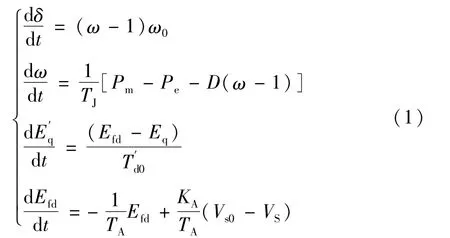
式中δ为电角度;ω0为同步电角速度;ω为电角速度;x为阻抗;vc为SSSC注线路的电压;vs、vr分别为发电机端电压和无穷大母线电压;D为阻尼系数;TJ为转子惯性时间常数;Eq为空载电动势;E′q为交轴暂态电动势;Efd为强制空载电动势;为励磁绕组的时间常数;Vs0为励磁调节器设定电压;KA为励磁系统放大倍数;TA为励磁系统时间常数;Pm为原动机机械功率;Pc为发电机电磁功率。
根据SSSC交流侧和直流侧的瞬时有功功率的平衡可以得到反映SSSC直流电容电压与线路电流、脉冲宽度调制系数、相角之间的动态关系式为:

式中m为逆变器的脉冲宽度调制系数;δsc为逆变器输出电压的相角。
式(1)通过参数控制即可调整m。整理并线性化式(1)可得到单机无穷大系统线性化动态方程式:
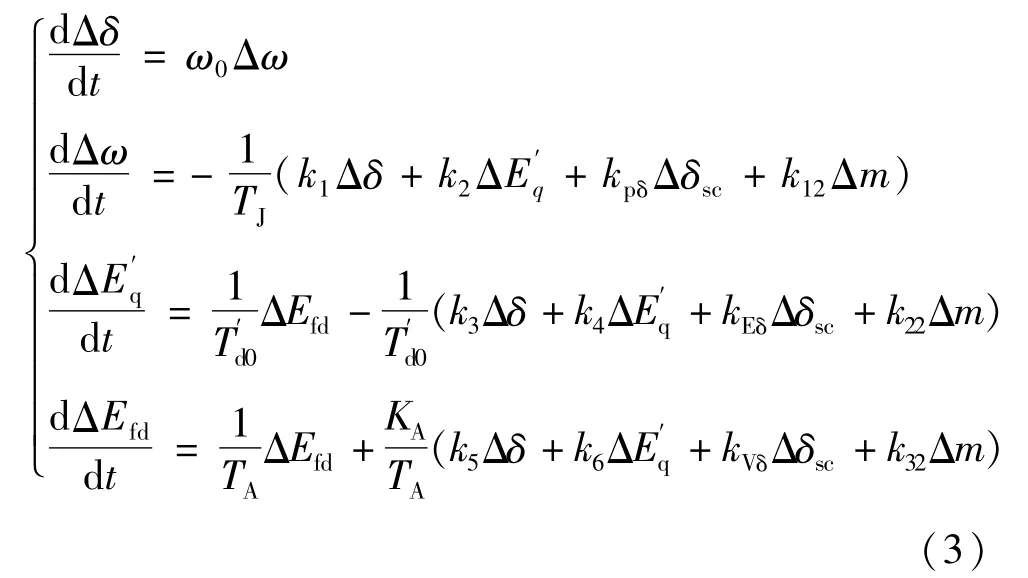
根据式(3)可得到含有SSSC的系统控制框图图2,其中输入和输出分别为:系统电角速度变化量Δω和SSSC逆变器脉冲宽度调制系数变化量Δm。

图2 含有SSSC的系统控制框图Fig.2 System control block diagram containing SSSC
当系统受到扰动后,SSSC能够快速调节输出电压,进而调节线路潮流使发电机回到正常运行状态。在SSSC调节过程中,逆变器输出的电压的相角Δδsc变化很小,对系统的影响可以忽略不计。而逆变器的振幅调制比会随着控制方法的不同而改变,进而调节输出电压。由于系统发生扰动后,角速度ω会发生变化,如果能跟随角速度的变化控制SSSC逆变器振幅调制比,对抑制功率振荡有一定的作用,因此,可令Δm=kΔω,即可继续推导控制环节的传递函数。
2 控制系统数学模型的建立
控制系统中输入Δω与输出Δm的关系可根据图2得出,整理变形可得到控制关系式即传递函数为公式(4),即可得到如图3所示的控制关系。
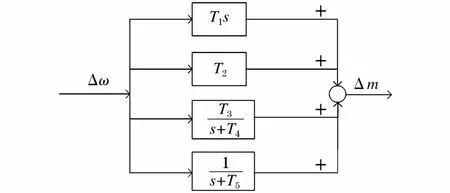
图3 控制系统框图Fig.3 Control system block diagram
传递函数可以写成:

传递函数G(s)是Δm与Δω的比值;T1为微分系数;T2为比例系数;T3、T4和T5则为惯性环节中的系数。其中T1=
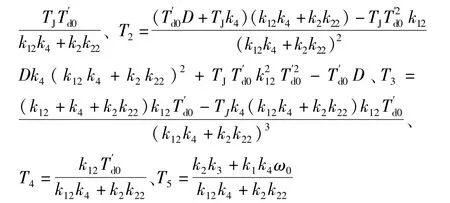
先根据稳定性判据确定参数T4,T5的范围,再根据SSSC控制器参数界限进一步确定参数的范围,表示为:

3 含有人工蜂群算法的控制系统
为了得到在上述范围内参数的准确值并且输出最优的系数m,必须使用优化算法,人工蜂群算法(ABC)是一种启发式智能算法[9-10],与其他优化算法相比,对目标函数和约束条件要求少,在搜索过程中不利用额外信息,具有操作简单、控制参数少、鲁棒性强的特点。
在ABC中,把待求问题的解即控制系统的控制系数Ti看做是食物,食物越充足,表示解的质量越好。为了应用ABC,要将问题转化为最优化问题。优化的目标函数为:


雇佣蜂时期:根据现有的可能最优解向量进行邻近搜索,找出其附近更好的可能解。当搜索到一个新的可能解后,用公式(6)评估其适应值。采用公式(7)来确定邻近解:
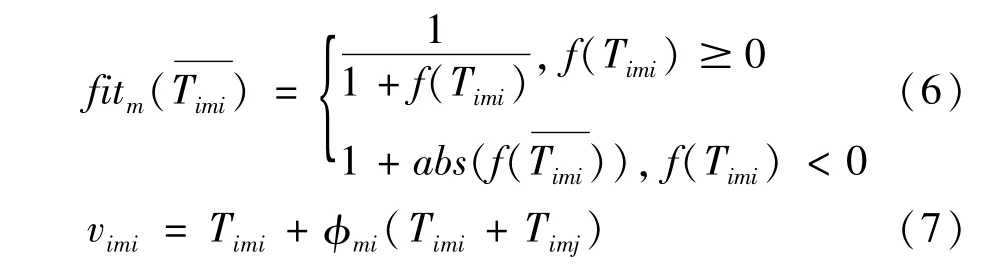
式中Timj是一个随机选择的食物源;i是随机选择的一个位置索引;φmi是一个[0,1]之间的一个随机数。产生新解后,计算出其适应值,并且在和之间应用贪心法做出选择。
观察蜂时期:此时,已经拥有了较多的可能最优的解的信息,现在根据这些信息进行随机的选择。被选中的概率pim可以用公式(8)计算。当可能最优解被选中后,利用式(7)产生邻近可能解,再计算其适应值。

侦察蜂时期:如果搜索的次数达到设定次数后,仍然未能提高解的质量,则雇佣蜂就变成为侦察蜂,其拥有的解就会被放弃。转换后的侦察蜂开始随机搜索新的解。
4 仿真验证
在图4所示的系统中对人工蜂群算法应用到控制系统的性能进行了仿真,发电机、传输线等的参数如下:xd=1.305,x′d=0.296,xq=0.474,f=50 Hz,C=100 MF。在MATLAB/Simulink搭建包含人工蜂群优化的系统模型进行分析。
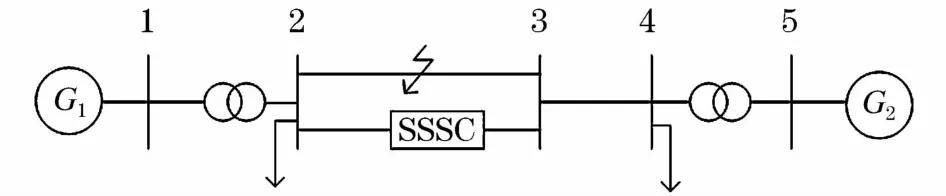
图4 电力系统结构图Fig.4 Configuration diagram of power system
为了验证在系统发生扰动时,SSSC对功率振荡阻尼的影响,进行如下仿真。正常运行的系统在2 s时突然在2、3节点之间的一回联络线中点发生三相短路故障,0.06 s后故障消除。ABC对目标函数的某次优化过程如图5所示。从图中可以看出随着迭代次数的增加目标函数值越来越小,迭代14次时已经接近期望值,可见其收敛速度是良好的。
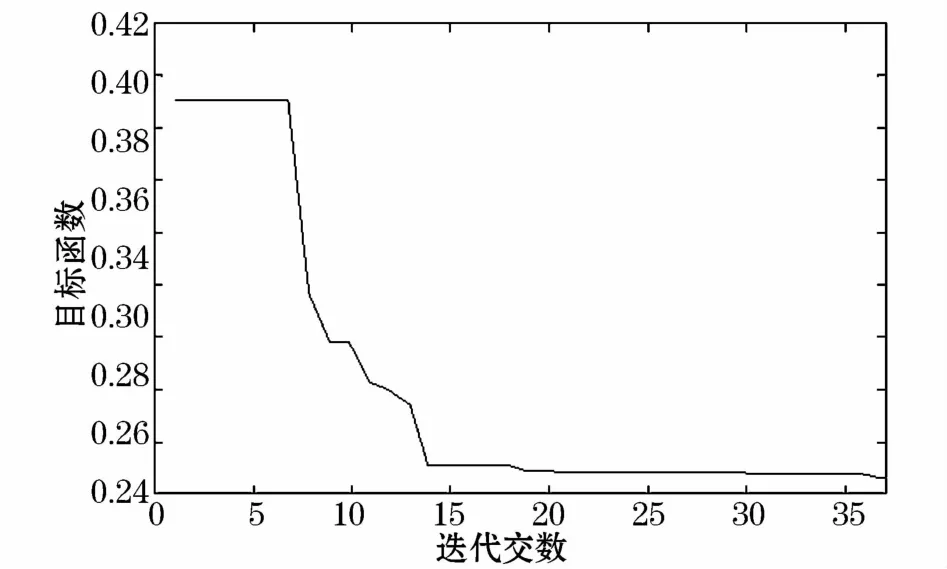
图5 人工蜂群算法的收敛性Fig.5 Artificial bee colony algorithm convergence
图6、图7分别给出发电机电角速度、节点2处有功功率的变化曲线。从图中可以看出,含有优化算法的明显优于传统PI算法。图6中,含优化算法的电角速度在5 s时率先进入稳态,振荡持续时间短,且振幅比传统PI算法的小的多。图7中,对于节点2处有功功率的变化,含有优化算法的,在5 s后达到稳定状态;而不含优化的,6 s后才达到稳定状态。

图6 发电机电角速度变化情况Fig.6 Electric generator acceleration changes
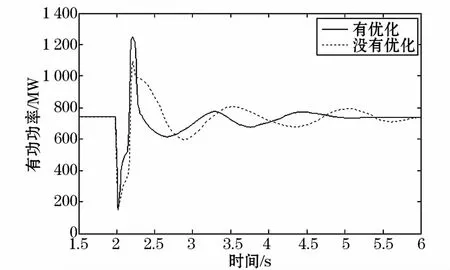
图7 有功功率变化情况Fig.7 Active power changes
图8反映的是SSSC注入电压的变化情况。从图中可以看出,在系统发生故障时,SSSC能够迅速的做出响应,发生故障时有功功率减少,为了达到稳定,SSSC向系统注入感性电压,故电压迅速增大。并且与没有优化的PI控制相比较,更快速的达到稳定状态,提高了系统的稳定性。

图8 SSSC输出的电压Fig.8 Voltage of SSSC output
5 结束语
在对SSSC的内部动态的变化加以考虑的情况下,建立含SSSC的单机无限大系统动态数学模型,以角速度的变化量控制SSSC逆变器调制比的变化,建立控制系统的传递函数,从而在系统发生扰动后控制SSSC等效注入系统的电压,提高功率输送能力;再利用人工蜂群算法,以电角速度与同步电角速度的差作为优化目标,搜索—选择—迭代搜索来寻找控制系统最优参数设计了SSSC控制器。仿真结果表明了所设计的控制器较传统的PI控制,能够快速响应抑制系统功率振荡。