变电站巡检机器人应用现状和主要性能指标分析*
2017-12-21蔡焕青邵瑰玮胡雾文志科王兴照吕俊涛
蔡焕青,邵瑰玮,胡雾,文志科,王兴照,吕俊涛
(1.中国电力科学研究院,武汉430074;2.国网山东省电力公司 济南250002)
0 引 言
变电站传统的单一巡检方式为人工巡检,存在劳动强度大、巡检效率低、巡检不到位、巡检标准不统一、雨雪恶劣环境下巡视困难等问题[1-3],并且简单依靠巡检人员的感官和经验,很难做到客观、全面、准确的评判,给设备的安全运行埋下安全隐患。
近年来,随着科技进步,以“信息化、数字化、自动化、互动化”为特征的智能电网和特高压建设的逐渐深入,传统的运检模式已不满足现代电网的发展需求,如何采用新形势下的新技术、新手段实现运维模式的转变,减轻变电站运维人员的运维负担,有效保障设备安全可靠运行,是今后所面临的主要问题之一。
变电站智能巡检机器人主要应用于室外变电站(也可应用于换流站,以下统称变电站),可对站内变电设备开展红外测温、表计读数、分合执行机构识别及异常状态报警等功能[4],并提供巡检数据的实时上传和数据分析、信息显示和报表自动生成等后台功能,具有巡检效率高、雨雪等恶劣环境下可开展巡检等优点[5-7],有效提高了变电站设备运行可靠性,是今后智能变电站运维技术发展的重点方向之一。
1 国内外变电站巡检机器人应用现状
1.1 国外应用现状
国外,目前在变电站巡检机器人应用方面,日本、新西兰等国有过相关报道,但仅是样机的开发和应用,并未规模化推广应用。
2003年,日本研究者率先提出了变电站巡检机器人的研究方案,完成了实验室模拟实验;随后,研制出适用于500 kV变电站巡检机器人,如图1所示,但是由于技术等问题,仅在2~3所变电站试用,并停止了后续的研发[7]。

图1 日本研制的变电站巡检机器人Fig.1 Substation inspection robot developed by Japan
2008年,圣西保罗大学研制了一种悬挂式移动机器人,主要应用于变电站内发热点温度监测,如图2所示,该机器人悬挂在站内高空钢索轨道上,采用搭载红外热像仪进行站内设备测温[8]。

图2 圣西保罗大学研制悬挂式移动机器人Fig.2 Suspension type mobile robot developed by St.Paul university west`
2012年,新西兰电网公司与梅西大学合作研发了全地形变电站巡检机器人,如图3所示。该机器人配置有防碰撞的可见光摄像机和超声波传感器,并配置有用于现场设备图像和视频回传的一个高清可见光摄像机。目前该机器人仅能采用远程遥控方式工作。
1.2 我国应用现状
中国,最早于1999年在山东开始变电站巡检机器人研究,在2001年首次提出了在变电站应用移动机器人技术进行设备巡检的想法[9];2005年10月,研制出国内首台产品样机,并在山东500 kV长清变电站投运,后续研制出了系列化的变电站巡检机器人[10-11]。

图3 新西兰电网公司研制的巡检机器人Fig.3 Substation inspection robot developed by New Zealand State Grid
2014年1月,研制成功激光导航式变电站巡检机器人,并在浙江瑞安变电站投运[12]。2014年5月,研制的变电站巡检机器人在湖南省衡阳电业局麻塘变电站成功试运行。
近年来,随着市场应用前景越来越乐观,越来越多的机器人制造厂商投入到变电站巡检机器人的设计、研发和销售,据统计,目前国内已有25家具有一定规模的变电站巡检机器人制造厂商,并已研制出适应于不同环境条件的变电站巡检机器人(如图4所示),极大促进了变电站智能巡检机器人的应用。
目前,国网公司正在进行变电站智能巡检机器人的推广应用,推广应用范围已遍布山东、北京、天津、广东、广西、浙江、江西、陕西、山西等全国十几个省、自治区和直辖市,电压等级从220 kV到1 000 kV特高压各电压等级交、直流变电站,积累了一定的应用经验。变电站巡检机器人在仿真设计、机器人操控、模式识别等多项关键性创新技术方面取得突破性进展,整体水平达到了国际领先水平。变电站巡检机器人自投运至今,已累计为客户发现1 000余项安全隐患,通过机器人的提前预警,及时进行处理,避免了重大电力事故,得到用户的好评,进一步提高电力生产运行的自动化水平,保障了电网安全可靠运行。
根据国家电网公司2015~2020年电网智能化规划指南,2018年,开展小型化、工具化机器人应用试点,建成变电站智能机器人巡检信息管理平台;2020年,全面推广小型化、工具化机器人,公司系统变电运维班组全部配置。
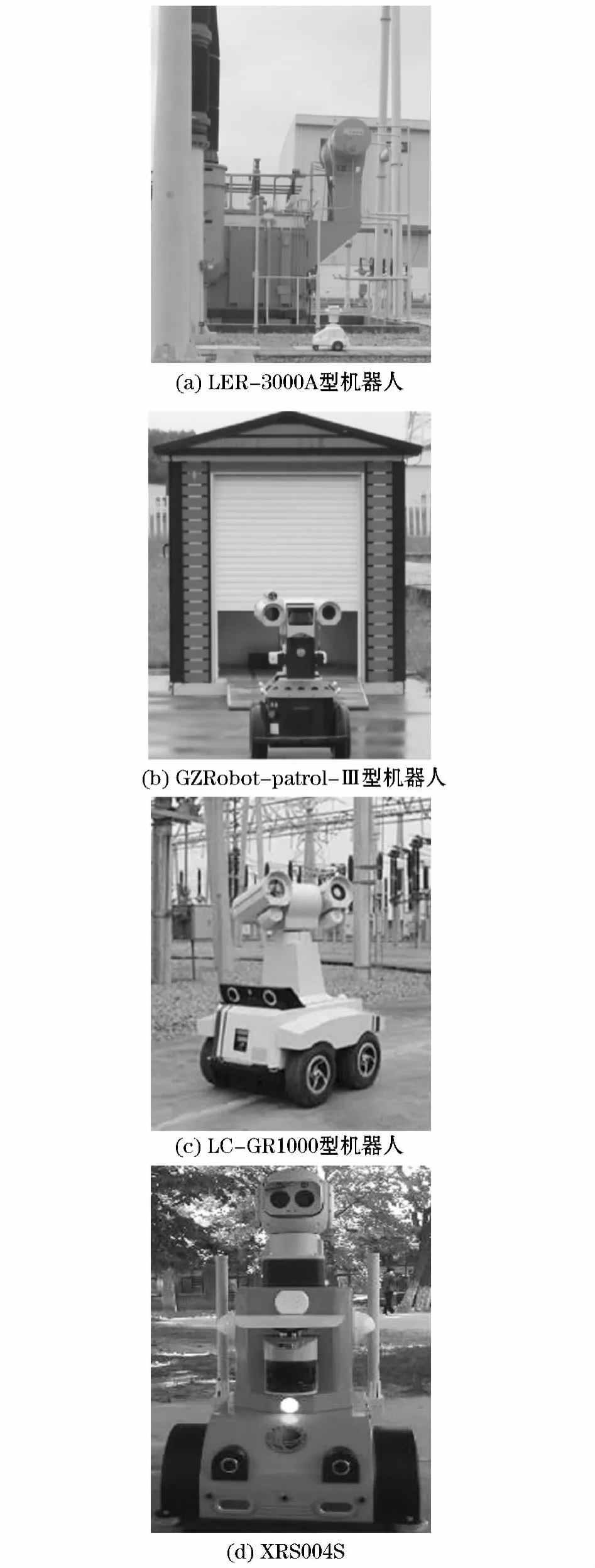
图4 中国多家公司研制的变电站机器人Fig.4 Substation inspection robot developed by many companies of China
但是,变电站智能巡检机器人在实际应用中也暴露出一些问题,变电站智能巡检机器人性能与电网实际应用需求存在一定差异,各机型性能良莠不齐,实用化巡检技术尚不够成熟,智能化程度不高,技术标准体系存在较多空白等问题,严重影响了变电站巡检机器人的规范化应用。
因此,有必要对变电站巡检机器人现状进行分析总结,针对变电站智能巡检机器人的功能定位和应用需求,提出关键性能指标需要改进的方向。
2 变电站巡检机器人巡检系统构成及功能需求
2.1 巡检系统构成
变电站巡检机器人巡检系统通常包括机器人分系统、任务荷载分系统和综合保障分系统三个部分。
机器人分系统包括机器人平台、通讯系统和监控后台系统。其中机器人平台包括机器人设备本体和导航控制系统,通讯系统包括数据传输和图像传输系统,监控后台系统包括实时状态控制系统、巡检任务管理和各项功能检测等软硬件。
任务载荷分系统包括任务设备和地面显控单元。其中,任务设备可多样化,标配可见光摄像机、红外热成像仪和声音采集,可灵活选配超声、局放、紫外等检测设备。
综合保障分系统一般包括供电设备、动力供给、专用工具、备品备件等。一般在巡检的变电站配置专用的自主充电室,机器人具备自主充电功能,电池电量不足时能够自动返回充电室,能够与充电室内充电设备配合完成自主充电。
2.2 功能需求
变电站巡检机器人巡检系统具备自主行走和悬停等运动功能,搭载有可见光、红外等检测设备,主要用于对站内的变压器、互感器、断路器、隔离开关等本体设备的外观、各个部件和接头、各种表计、分合执行机构等进行巡视检测;亦可根据故障信息,开展故障点及其他异常情况查找等工作。
针对变电站巡检机器人的应用需求和应用场景,根据是否配备有远程集控后台,变电站机器人巡检系统又可分为单站型和多站型。其中,单站型机器人巡检系统因不具有远程集控系统,主要在站内单台使用,一般一台机器人只在一个站工作,不便于移动,不能覆盖多个站,无法集中使用和控制,使用效率不高,不能充分发挥机器人的巡检作用。多站型机器人巡检系统配置有远程集控后台系统,一台远程集控后台可控制多台本地监控后台,相应地可控制一台巡检机器人在多个站内使用,主要用于从运维人员驻地对无人值守变电站智能机器人运行状态和巡视结果的远程浏览、远程控制。
3 变电站巡检机器人巡检系统主要性能指标分析
目前,国内变电站巡检机器人技术尚不够成熟、可靠性低、稳定性不高。在实际应用中发现,目前大多数巡检机器人只配置有可见光摄像机与红外测温仪,而紫外探测仪、SF6气体检漏仪等检测设备还无法在机器人巡检中应用,固化的检测设备拆卸复杂和后期维护保养不方便,变电站智能巡检机器人的巡检能力受到限制;巡检机器人在巡检中,若遇到雨雪或结冰的环境时,易防碰撞超声误报、通讯性能降低、运动功能明显降低或丧失等现象;部分巡检机器人的自主导航定位不稳定,巡检作业时经常出现机器人“走偏”,甚至出现翻车到变电站下水沟的现场。因此,为了促进变电站智能巡检机器人推广应用,需要进一步优化完善任务设备的配置、安全控制策略、环境适应性、通讯和无线电抗干扰等技术。
近年来,由于电站巡检机器人较好的市场应用前景,引起国内外有较多供应商不断投入到巡检机器人的设计、研发、生产制造和营销工作中,已研制出适应于不同作业条件不同机型的变电站巡检机器人,市面上有较多机型可供选择。但不同机型之间性能特点和技术指标存在较大不同,导致实际应用效果差异较大。因此,有必要针对变电站巡检作业的要求,对其技术指标和试验标准进行统一,以保证巡检安全和质量。
目前,由于国内外均没有针对变电站巡检机器人巡检系统的技术指标和性能参数等方面的试验标准,为了掌握目前变电站巡检机器人的主要性能情况,国网公司在对现状进行总结分析的基础上,从巡检实际需求出发,初步建设了国内外首个变电站巡检机器人性能模拟试验场和特高压变电考核试验场,可开展机器人巡检系统的运动功能、巡检能力、监控后台功能、抗电磁干扰性能、一般环境适应性、动力电池性能等类型共计47项试验项目。截止2015年12月,已完成约13个机型的集中试验检测工作。
3.1 巡检能力
巡检能力是考核变电站巡检机器人实际应用能力的关键技术指标,应满足的技术要求为:
(1)具备巡检任务模式设置;
(2)机器人可巡视全部户外一次设备(人工无法直接巡视的除外),满足巡检全覆盖的要求,覆盖率达到100%;
(3)机器人能够对有读数的表盘及油位标记、分合执行机构等进行自动读取和识别,并异常状态报警,读数误差小于±5%,识别准确率应不小于60%;
(4)具备红外测温功能,读数与实际值(手持式高精度红外测温仪读数)误差小于±5%;
(5)具备拾音功能。能对设备运行噪声进行采集、远传、分析。
测试内容主要包括:指针、数显、油位等各种表计的识别、分合执行机构状态识别、变压器噪声识别,及1 000 kV变压器、互感器、隔离开关、避雷器等本体设备外观检查、关键部件红外测温等,试验现场如图5所示。

表计和分合机构巡检覆盖率、识别准确率试验结果见表1。已测试机型中,61.5%机型的巡检覆盖率为100%,但23.1%机型的巡检覆盖率小于60%,与实现巡检全覆盖的要求相差较远;53.8%机型的识别准确率大于60%(满足识别准确率不小于60%的要求),23.1%机型的识别准确率在70%和80%之间,15.4%机型的识别准确率在80%和90%之间。
图5 变电站机器人巡检能力试验现场Fig.5 Testing site of inspection ability test of substation inspection robot

表1 别准确率试验结果Tab.1 Test results of recognition accuracy
红外测温准确率试验结果见表2。已测机型均具备红外测温功能,且还具备三相温差对比分析和异常报警功能;但部分机型的红外测温误差较大,测温误差范围最大的为1.29%~23.68%,23.1%机型测温准确率为100%,38.5%机型的测温准确率在80%~90%间,38.5%机型的测温准确率小于80%。
此外,已测试机型均具备对变电站设备噪声的采集、上传功能,但70%机型都不具备噪声波形分析功能。
因此,对于变电站巡检机器人的巡检能力,建议在以下方面进行改进:(1)加强变电站巡检机器人应用的现场施工、安装、调试和现场测试,及机器人云台的模块化设计研究,提高巡检覆盖率,拓展机器人的应用范围;(2)进一步加强机器人巡检图像处理和识别技术研究,提高巡检识别准确度(包括准确性和和稳定性);(3)加强机器人红外测温设备的校准工作;(4)建议通过建立变电站设备噪声库,将机器人录制噪声波形与噪声库中波形进行比对分析,以准确、实时判断设备是否出现故障。

表2 红外测温准确率试验结果Tab.2 Test results of accuracy rate of infrared detection
3.2 运动功能
运动功能试验项目包括自主导航及定位准确度、防碰撞功能、越障能力、涉水能力、爬坡能力、转弯半径、巡航时间和云台性能。其中,在导航定位方面,目前,大多数机器人采用磁导航定位方式,机器人可按照预先规划路径自主移动及指定位置停靠,实现了在变电站设备区道路的全天候精确定位导航[13];随着传感器技术的不断突破,研制的机器人采用激光定位导航,实现了站内的无轨导航定位[14]。
自主导航定位精度试验结果见表3。76.9%机型满足“重复导航定位误差不大于±10 mm”要求;除一个机型因在1 m/s速度下启动不稳定未完成测试外,其余机型均满足“在1 m/s的运动速度下,最小制动距离不大于0.5 m”要求。
越障高度、涉水深度和爬坡坡度试验结果见表4。已测试机型中,除了一个机型不具备越障能力外,其余机型的越障高度均满足“最小越障高度为5 cm”技术要求,其中,越障高度最高的可达到10 cm;
已测试机型中,除了一个机型不具备爬坡功能外,其余机型的涉水深度均满足“最小涉水深度为100 mm”技术要求,其中,涉水深度最高的为18 cm。

表3 自主导航定位精度试验结果Tab.3 Test results of autonomous navigation and positioning accuracy

表4 越障、涉水和爬坡试验结果Tab.4 Test results of obstacle clearing,fording and climbing slope
3.3 抗电磁干扰性能
变电站巡检机器人巡检时受变电站运行电压、附近通讯基站、及周边的电磁骚扰等电磁干扰的影响,试验项目包括射频电磁场辐射抗扰度、静电放电抗扰度和工频磁场抗扰度试验三项。
关于辐射抗扰度试验,已测样品中,射频电磁场辐射抗扰度试验的试验结果均为A级。但是各机型实际开展的试验等级不统一。其中,38.5%机型开展的试验等级为2级,低于实际应用中巡检机器人应能承受的严酷等级为3级的试验要求。
关于静电放电抗扰度试验,已测样品中,3个机型的试验结果为B级,其余均为A级。但各机型开展的试验等级不统一。
关于工频磁场抗扰度试验的试验,已测样品的试验结果均为A级别,但69.2%机型开展的试验等级过低,低于实际应用中机器人应能承受GB/T 17626.8规定的严酷等级为5级的试验要求。
由于目前GB/T 17626电磁抗扰度系列试验标准是电工电子产品的通用标准,变电站巡检机器人开展电磁抗扰度试验可参照执行,但具体应开展的试验等级尚未明确规定,建议进一步完善变电站巡检机器人的试验标准体系建设,明确具体的试验等级要求。
3.4 环境适应性
一般要求变电站巡检机器人的工作环境温度为-25℃~+50℃(东北地区-30℃~+50℃),但实际应用表明,冬季雨雪结冰户外环境对机器人性能有明显影响,甚至导致机器人不能正常工作。因此,在变电站机器人投入应用前,需对机器人的环境适应性能进行测试。
目前,各机型的环境适应性能试验依据的试验标准不统一,如:有的机型依据GB 2423系列电工电子产品环境试验标准,该系列标准主要是针对电工电子产品的环境适应性能方面的专用标准,且试验项目和试验方法具有一定的普适性;有的机型依据GJB 150系列军工产品标准,其适用范围较窄、普适性较差;有的机型依据GB/T 7261电力系统二次电路所用保护装置、安全自动装置及其接口设备等产品的试验标准,该标准关于环境适应性能方面的试验项目和试验方法要求较低。因此,建议统一试验标准,各机型依据GB 2423系列电工电子产品环境试验标准开展环境适应性试验。
3.5 IP防护等级
已测机型中,57.1%机型满足IP34防护等级要求,其余机型满足IP54防护等级要求。建议统一各机型的IP防护等级要求为IP54。
4 结束语
对目前国内变电站巡检机器人巡检系统主要性能指标进行了分析,从变电站巡检巡检作业特点出发,提出了今后设备性能改进方向。
(1)受成本以及生产自动化水平等方面的限制,不同型号的机器人性能指标差异较大,但变电站巡检机器人不存在难以克服的技术难点,技术指标基本满足变电站智能巡检的应用需要;
(2)图像智能识别技术是人工智能的关键点和难点,目前变电站巡检机器人巡检识别率较低(已测机型中,识别准确率大于60%的机型占比为53.8%),建议加强巡检图像智能处理和识别技术研究,提高巡检识别准确度(包括准确性和和稳定性),以促进变电站巡检机器人的实用化程度;
(3)变电站巡检机器人巡检时,对巡检控制精度要求,还需加强机器人导航定位和最小制动距离控制精度。如,在导航定位方面,可考虑改进导航定位方式、采用高精度定位模块、增加导航定位数据更新频率等以提高定位精度;
(4)变电站巡检机器人巡检易受强电磁干扰及外界环境温度、湿度、雨雪等环境因素的影响。目前,由于现有招标技术规范中没有明确规定应遵循的技术标准,部分厂家在委托第三方检测机构开展试验时,遵循的试验标准过低或开展试验等级过低。建议加快试验标准制定,进一步完善相关试验能力建设,使技术指标与试验方法标准化;
(5)深入了解电网实际应用需求,开发无导轨导航、小型化、工具化和集中使用变电站智能机器人,建立变电站能巡检机器人巡检信息集中管理平台,是变电站巡检机器人今后的发展方向。
