微电网多逆变器运行的自适应下垂控制新策略*
2017-12-20杨旭红何超杰
杨旭红,何超杰
(上海市电站自动化重点实验室,上海电力学院 自动化工程学院,上海 200090)
0 引 言
随着能源和环境问题的日益严峻,我国智能电网的研究也在不断深入,微电网作为智能电网的重要组成部分受到了广泛的关注[1]。微电网作为小型电力系统,分并网运行和孤岛运行2种模式。当微电网运行在孤岛模式时,由于脱离了主电网的控制,工作电压和频率主要取决于系统的调控[2]。微电网中的DG和储能装置大多通过逆变器在公共连接点(PCC)并联接入电网,由于逆变器与PCC间的物理连线阻抗存在差异,导致传统的下垂控制无法实现功率的合理分配,进而产生过大的系统环流,甚至引发电网的过流故障[3]。
微电网的控制结构主要分三种:主从控制,对等控制和分层控制。主从控制和分层控制中各分布式单元之间需要进行通信,一旦通信中断,微电网整个系统就不能正常运行。对等控制结构中各分布式单元之间不需要进行通信,通常采用下垂控制策略,依靠本地信息进行控制,成本较低,易于扩展,可实现无缝切换[4]。但是下垂控制的缺点是当主电网电压受到扰动时,易使系统失去稳定,而且对功率的分配及环流抑制受线路阻抗的影响极大[5]。西班牙学者Guerrero T.M较早提出了虚拟阻抗策略[6-8]调整逆变器在基波域的输出阻抗,以改善因逆变器间的输出阻抗与线路阻抗之和的差异造成功率分配效果下降的影响。文献[9]和文献[10]分别提出了负虚拟阻抗策略和阻抗匹配策略,然而,虚拟阻抗产生的压降及参数设计与连线阻抗密切相关,加之连线阻抗的不确定性[11],通过设计虚拟阻抗进行阻抗匹配只能改善系统却不能完全解决问题。文献[12]采用粗调、微调及降压补偿多环调节策略,但是控制器的设计涉及线路阻抗参数,而且由表达式可知也是有差调节。文献[13]采用下垂控制法结合ΔU恢复机制的策略,但该策略的参考ΔU不易确定。该问题与文献[14]中功率均值的不易确定在本质上是相同的。
本文分析了微电网孤岛模式下多逆变器并联运行的电气特性、传统下垂控制策略的原理及虚拟阻抗技术,设计逆变器的输出阻抗。针对传统下垂控制的不足,提出一种新型自适应下垂控制策略。该策略结构简单,可以自适应阻抗差异变化的影响,实现功率的合理均分。
1 传统下垂控制分析
图1为微电网多逆变器并联运行的系统结构。
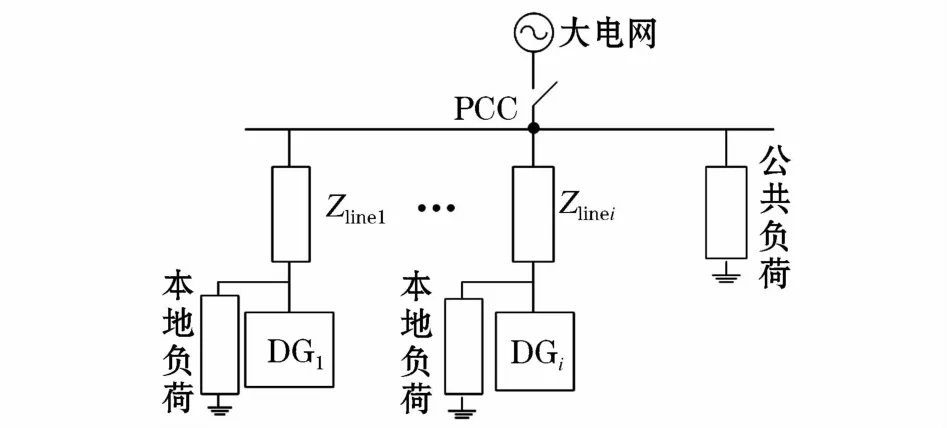
图1 微电网多逆变器并联运行结构图Fig.1 Structure diagram of micro grid inverters in parallel operation
在不考虑本地负载时,以PCC出的电压为基准记为Upcc∠0°,DGi的输出电压为Uoi∠δi,其中功率角δi为逆变器输出电压与PCC处电压的相角差。线路阻抗zlinei=Rlinei+jXlinei,逆变器等效输出阻抗zoi=Roi+jXoi,令z i=(Rlinei+Roi)+j(Xlinei+Xoi)=Ri+jXi,其阻抗角θi=arctan(Xi/Ri)。由此可计算得DGi输出的有功功率Pi和无功功率Qi,为:
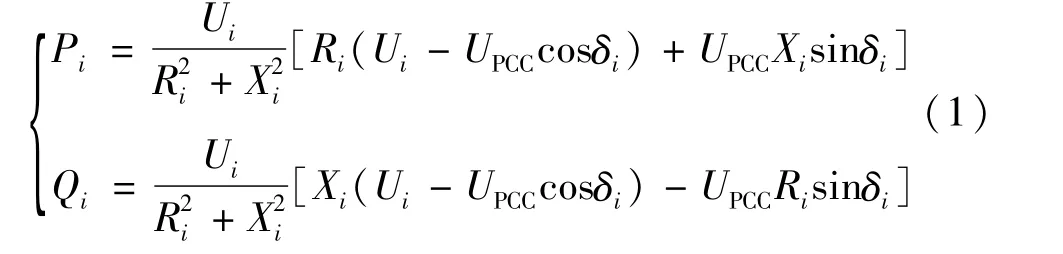
式中Ui为未经过滤波电感的电压。若Ri≫Xi,则可忽略电感Xi,并且实际上δi一般很小,可以认为sin(δi)≈δi,cos(δi)≈1。所以,可简化公式(1)为:
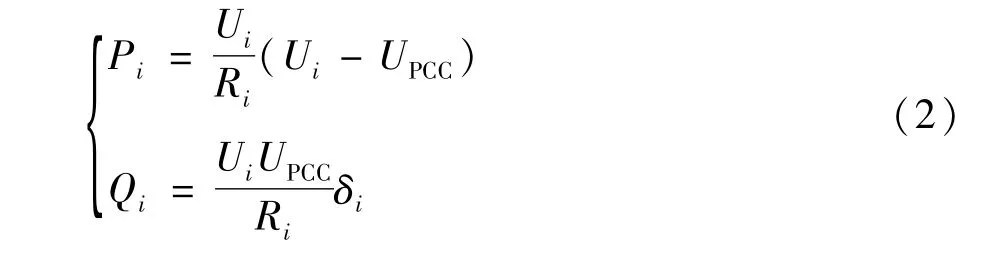
由公式(2)可知,在PCC处的电压不变及Ri≫Xi的情况下,逆变器输出的Pi主要与Ui的幅值有关,Qi则主要与δi有关。由于Pi与Ui、Qi与δi近似呈线性关系,且δi可由频率f进行调节,因此传统的下垂控制可表达如下:

式中fn和Un分别为逆变器的额定输出频率和额定输出电压,mi和ni为各逆变器的下垂控制系数,Pni和Qni为各逆变器的额定有功功率和额定无功功率,Pi和Qi为当前各逆变器的有功和无功功率,fi*和Ui*为合成电压环所需的参考频率和参考电压幅值。在阻抗z i不一致时,若要实现功率均分则逆变器间的输出电压必然存在压差,但根据表达式当Pi相等时各逆变器所调节的压差一致(即逆变器间的输出电压无压差)。因此传统下垂控制是有差调节,系统会在呈阻抗反比的功率分配与均分之间达到稳定。
从上述分析可知,这是在z i呈电阻性情况下的传统下垂控制表达式。当逆变器并联运行时,传统的Q-f下垂控制环由于f是一个全局变量[15],无功负荷始终能够根据下垂系数得到精确分配。而有功负荷主要受线路阻抗差异影响,在微网稳定后DGi的输出电压一定不相等,这与传统P-U下垂控制环的控制方程相矛盾,因此无法实现有功功率P的合理分配[16],需要对传统的下垂控制进行改进。
2 逆变器的控制策略及其输出阻抗设计
电网的线路电气参数与所处的电压等级有关,低压微电网的线路电气参数一般为:电阻r=0.642 Ω/km,电感x=0.083Ω/km,阻抗比r/x=7.70。在连接线路呈电阻性的微电网中,若设计逆变器的输出阻抗使得z i呈电阻性可以相对减小虚拟阻抗上的压降,防止输出电压偏低。另一方面,负虚拟阻抗虽然能改善压降问题但存在过补偿造成系统不稳定及zi设计越小偏差越大的问题。因此本文选择设计zi呈电阻性,并且根据线路阻抗及各逆变器的额定容量比进行匹配设计。
本文采用电感电流内环、电压外环的双闭环控制器,其中电压外环采用PI控制,能够改善系统输出电压的波形且具有较高的精度;电流内环采用比例P控制,可以提高系统的动态性能。通过对控制环参数的设计和虚拟阻抗的引入,可以有效地改善逆变器的输出阻抗。逆变器的双闭环控制框图如图2所示。
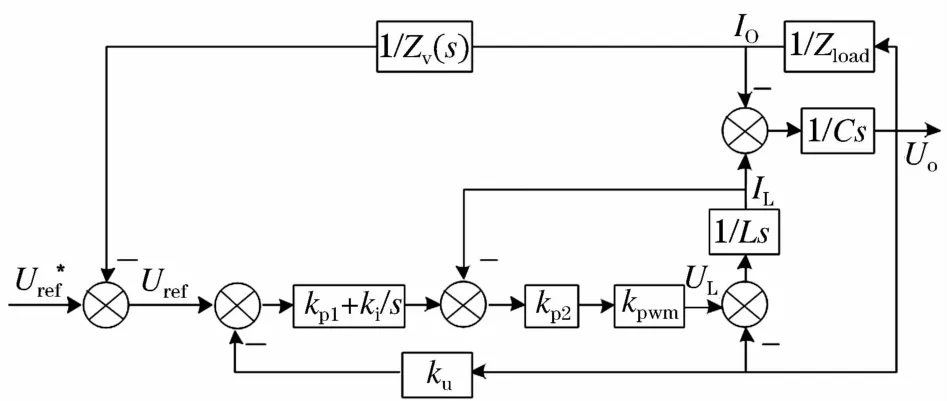
图2 逆变器双闭环控制框图Fig.2 Block diagram of inverter with dual closed-loop control
由于滤波电容数值较小,可以忽略滤波电容的影响,并根据逆变器的控制框图可求得输出电压Uo的简化表达式:
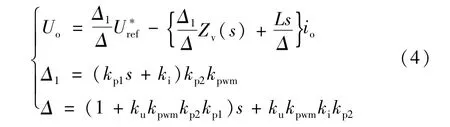
式中zv(s)为虚拟阻抗。由公式(4)可知,逆变器输出阻抗zo的近似表达式为:

令zv(s)=ku(R+Ls)带入公式(5),可近似地认为zo(s)=R+Ls,并且根据实际线路阻抗和逆变器额定容量确定R和L。仿真中依照上述方法匹配后已经可以很好地自动分配功率,甚至不需要下垂控制。而实际中,不仅线路阻抗存在测量误差和漂移现象,而且逆变器输出阻抗也会与近似值有一定的偏差。因此,在本文中虚拟阻抗技术的作用为使z i呈电阻性和使阻抗z i在理论上匹配以保障下垂控制作为微调手段,在仿真中则以zv(s)的设计偏差代替实际阻抗不匹配现象。
另一方面,根据系统控制结构和上述控制策略,以电感电流和电容电压作为不相关变量列出逆变器的电路方程:
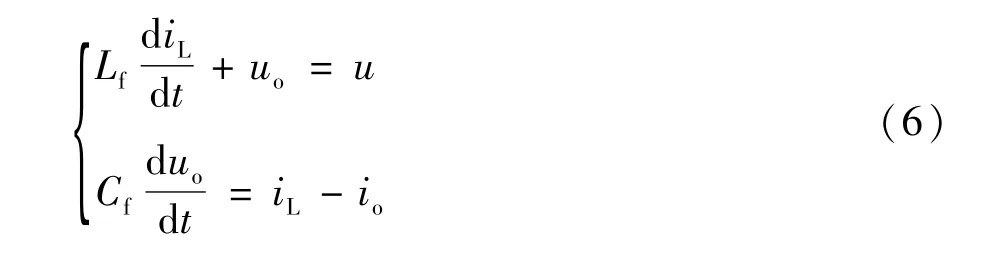
式中uo和u分别为逆变器输出电压(即滤波电容电压)和滤波前的逆变器输出电压;io、iL分别为逆变器输出电流和滤波电感电流。公式(6)经Park变换,可获得旋转坐标系下的表达式:
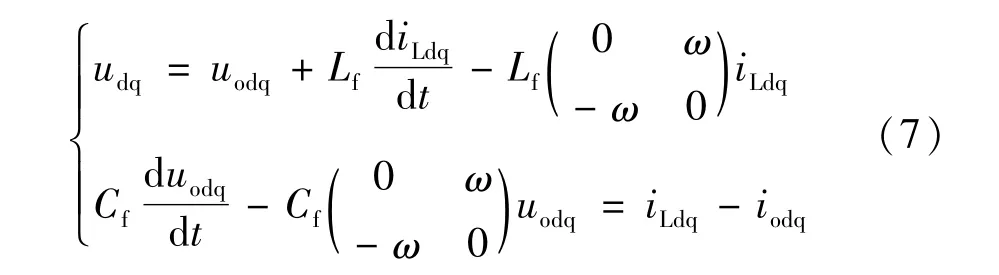
根据式(7)的电路关系可获得逆变器双闭环解耦控制结构。同理可求得虚拟阻抗在dq0坐标系下的表达式,得到可设计逆变器输出阻抗的解耦控制框图,如图3所示。
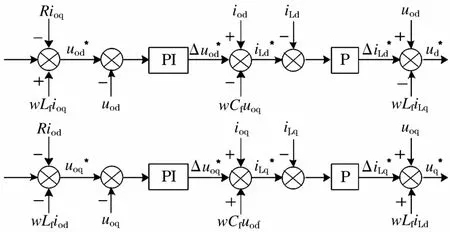
图3 逆变器解耦控制框图Fig.3 Block diagram of a inverter decoupling control
3 自适应下垂控制策略
控制逆变器的输出电压需要控制电压的幅值和频率两个量,从电气特性可知频率f是一个全局变量,当系统稳定时各逆变器输出频率相等,能够使无功功率得到均分,因此Q-f下垂控制环与传统相一致;另一方面,由于阻抗差异各逆变器的输出电压存在压差,P-U下垂控制环必须锁定该压差,而且要能够不受由负载功率变化及z i的变化引起各逆变器输出电压的压差不同的影响而自适应调整。因此,本文提出了一种控制策略,表达式为:

式中k为比例系数,可以调节积分项的大小,k越大调节速度越快但逆变器的输出电压的波动也会越大,k越小则相反,因此需要兼顾两者选取一个合适的值。ω也为一常系数,使Pi/Pni产生一个正弦变化而其频率恒定的比例系数,ω过大则输出电压高频谐波严重,过小则会减慢调节速度,本文取ω=50π。
如果去掉传统P-U下垂控制环的线性有差调节项,即ni(Pi-Pni),该控制系统依然可以实现功率的均分。分析如下:系统稳定时,Pi会稳定于某一值。当Pi/Pni相等时,sin(ωt)的幅值相等,所以一个周期内积分项任意时刻产生的压差相等且积分为0,系统能稳定于这一状态。当Pi/Pni不相等时,取P1/Pn1>P2/Pn2,则 sin(ωt)幅值不相等。在前半周期,P1的压差变化量大于P2的压差变化量,可知U1与U2的压差相对减小,P1减小而P2则增大,此时是正调节;在后半周期,则相反为负调节,但正调节量大于负调节量,前后半个周期不是一个无差的重复调节。这是因为在相同时间间隔下,压差大的其压差变化量(积分项)大,表明在一个周期内前半周期从开始变化快而一直快,后半周期从开始变化慢而一直慢,如此反复直至Pi/Pni相等。其中Pi/Pni的分母,作用为实现有功功率的比例均分,无功功率的比例均分可通过调整mi实现。
但是,如上文所述该策略对控制系统参数k设计要求较高。若系统功率均分时所达到的压差较大,k在兼顾调节速度和电压波动两者的情况下设计出来的值会较大(该情况不考虑通过阻抗设计减小压差)。即在阻抗设计完成,但在实际情况或各种因素导致z i差异较大的情况下,功率均分时的压差也会较大,本文通过加入ni(Pi-Pni)项来减轻参数k的负担。因为它不像积分项是一点点累计压差,而是根据当前Pi立即做出压差调整。Pi越不均分,ni(Pi-Pni)给的调整越大,而Pi向均分状态变化越快也带动了积分项压差的累积速度变快,这是因为积分也包含Pi变量。但是,ni并不是越大越好,跟传统下垂控制一样,ni越大逆变器输出电压固定压升ni Pni越大。ni取合适的值即可,理论上取ni(Pi-Pni)在均分功率值对应的压差附近最好。
4 仿真与分析
为了验证理论分析的正确性,进行了相关的仿真分析。在MATLAB/Simulink平台上搭建了孤岛模式下2台逆变器并联的微电网模型,采用本文提出的自适应下垂控制与去掉ni(Pi-Pni)项的下垂控制、传统的下垂控制进行比较分析,由于无功功率根据频率f可以有效地均分,本文未给出详细数据图也不再对其进行分析,主要分析各逆变器有功功率的分配情况。
微电网额定相电压为220 V,线电压为380 V,因此取两台逆变器的滤波电容都取C=0.031 F,滤波电感都取L=2.27×10-4H。逆变器1的线路阻抗为zline1=(0.642+j0.083)Ω,逆变器2的线路阻抗为zline2=(0.321+j0.0415)Ω。公共负荷起始为S=(5 000+j2 000)VA,经过0.5 s三后减至S=(3 000+j2 000)VA。
逆变器的自适应下垂控制系统主要参数如下:逆变器增益kpwm=800;电压反馈系数ku=10;电压环比例增益kp1=3,积分增益ki=300;电流环比例增益kp2=50;逆变器1的额定有功功率Pn1=5 000/3W,额定无功功率Qn1=2 000/3 Var,虚拟阻抗的参数则选定为zv1(s)=ku(R+Ls)=ku(0.642+2.27×10-5s),下垂控制环m1=0.000 75,n1=0.000 6,k1=100;逆变器2的额定有功功率Pn2=5 000 W,额定无功功率Qn2=2 000 Var,虚拟阻抗zv2(s)=ku(R+Ls)=ku(0+2.27×10-5s),下垂控制环m1=0.000 25,n1=0.000 2,k2=100。去除ni(Pi-Pni)项的自适应下垂控制参数与上文基本相同,只改变k1=k2=300。
由上述虚拟阻抗的参数可知,逆变器1与逆变器2的阻抗比约等于4:1,即功率分配按约为1:4比例分配。这与设计要求的1:3比例分配不符,本文先对传统下垂控制和去掉ni(Pi-Pni)项的自适应下垂控制进行仿真分析,逆变器1、2的有功功率输出如图4所示。从图4可以看出,用传统下垂控制的逆变器1与逆变器2的有功功率比介于1:4与1:3之间,提高下垂系数则P越接近1:3,但始终不可能达到,同时逆变器的输出电压也会随之变大偏离额定值。而用去掉ni(Pi-Pni)项自适应下垂控制策略,可以看出2台逆变器的有功功率比基本稳定于1:3,实现了功率的合理分配。
上述比较中,可知即使去掉ni(Pi-Pni)项也可以实现有功功率P的均分。本文再对含ni(Pi-Pni)项的自适应下垂控制策略进行仿真,与前者进行比较分析,逆变器1、2的有功功率输出如图5所示。

图4 逆变器有功功率输出Fig.4 The diagram of inverters active power output
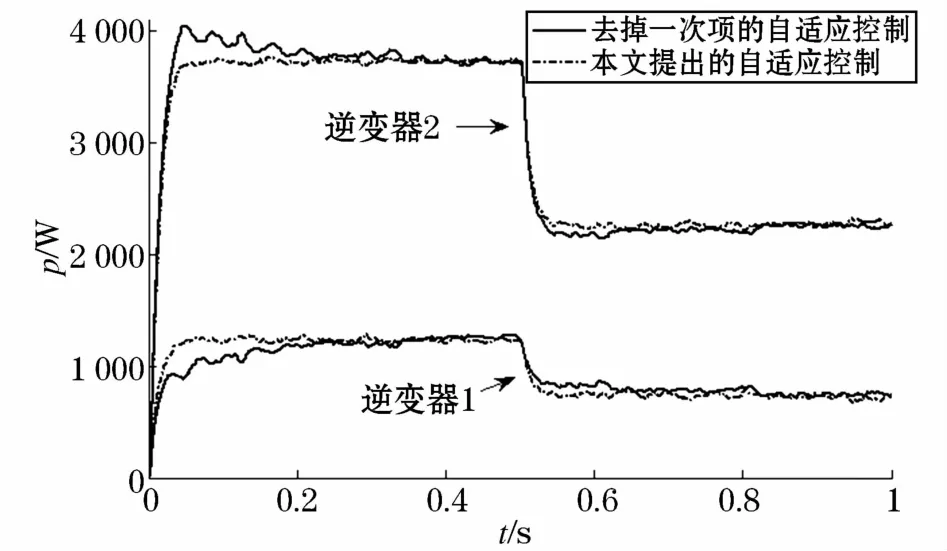
图5 2种自适应控制下逆变器有功功率输出Fig.5 The diagram of inverters active power output under 2 self-adaptive control strategies
从图5中可以明显的看到,去掉一次项的控制系统差不多要经过0.2 s才能达到稳定和功率均分,而本文所提出的控制策略只需要0.05 s左右就能实现稳定和均分。在系统参数相同,k的系数减小到1/3时,本来调节速度会降低,却因为加入ni(Pi-Pni)项反而调节速度大大提高,而且使系统稳定时逆变器输出的电压波动减小为无ni(Pi-Pni)项的1/3。从仿真结果分析表明了理论分析的正确性,通过该策略可以有效地提高系统的控制性能,并且实现功率的均分。
5 结束语
由于线路阻抗差异的影响,传统下垂控制往往无法实现微电网中所有DG的逆变器在无互通信的条件下控制功率合理均分。针对该问题,提出了一种自适应下垂控制新策略,实现对有功功率的无差调节,而且分析了ni(Pi-Pni)项的加入可以很好地改善系统的性能。该策略下垂控制环的设计不需要精确的阻抗数值,因此阻抗差异大小不确定及其在实际运行中发生变化的情况下仍可以实现均分,给微电网孤岛模式下多逆变器并联运行的控制提供了一种思路。
