风电调频的控制参数选择及其影响分析*
2017-12-20黑阳付媛王毅张祥宇
黑阳,付媛,王毅,张祥宇
(华北电力大学新能源电力系统国家重点实验室,河北保定071003)
0 引 言
风力发电作为目前技术最成熟、最具规模开发条件的新能源发电方式,在电网中所占的比例将不断增加。为缓解常规机组的调频压力,要求高渗透率的风力发电场能够提供有功调节及备用风辅助功能,至少具备类似于同步发电机组的频率响应以及调频控制能力[1-3]。
国内外学者对风电机组的调频控制方法进行了大量研究,但是为了进一步提高系统频率质量,有必要对风电调频的控制参数及其影响进行深入研究,定量分析这些控制参数对频率的影响,以便合理的选择控制参数提高风电机组的调频能力,保证系统的频率质量。
针对变速风电机组的调频控制能力,理论研究更多关注风电机组的惯性控制和一次调频控制。对于惯性控制,目前的研究集中在虚拟惯性的控制策略方面,主要研究采用何种方法利用其“隐含”的惯量,对频率提供动态支持,提高系统频率的暂态稳定[4-6]。对于长时间的调频控制方法,即一次调频,主要有转速控制[7-9]、桨距控制以及这两种控制策略的配合使用[10-12]等方法。文献[13]采用了虚拟惯性与一次调频的综合控制方案,整定出了风电机组的功频静特性,有效的减小了扰动初期的频率变化率及稳态频率偏差,并且分析了不同静调差系数下的一次调频能力。但是,上述文献均是从调频控制方法的角度,定性分析了各种方法对系统频率的改善作用,并未对影响频率质量的各种控制参数进行深入分析比较。
因此,本文以风电调频的控制参数作为研究对象,定量分析其参数大小对风电机组的调频能力的影响,通过对风电调频控制参数的合理整定确定风电参与调频的最佳状态,从而进一步提高系统的频率质量。
1 调频控制参数选择及其影响分析
1.1 减载水平对调频的影响
为使风电机组参与系统的一次调频,需要风电机组减载运行,预留一定的备用容量,持续分担系统的不平衡功率。减载水平的大小直接决定了预留备用容量的多少,预留备用容量越多,在系统负荷波动造成频率变化时,提供功率支持越多,从而减小传统机组的调频压力。
结合常规发电机组静调差系数的定义[14],则风电机组的静调差系数为:

式中Δf为系统稳态频率变化量;ΔPG为风电机组功率变化量。
风电机组的减载水平可设定为:

式中ΔPG为风电机组的减载功率;P0为风电机组的初始功率。
由式(1)和式(2),可得出:

选取风电机组的静调差系数为0.03,初始运行在风速为7 m/s情况下,结合式(3)可得到在不同减载水平下的系统稳态频率变化量,如表1所示。通过曲线拟合得到减载水平与稳态频率变化量的关系曲线,如图1所示。

表1 不同减载水平下的稳态频率变化量Tab.1 Steady state frequency variation with different load reduction levels

图1 减载水平与稳态频率变化量的关系Fig.1 Relationship between load shedding and steady state frequency variation
由图1可以看出,减载水平越大,系统的稳态频率变化量Δf越大,这是由于随着减载水平的增大,机组的有功备用越多,在功率不平衡时提供的有功功率越多,对频率调整的贡献越大,因此Δf越大。但是过大的减载水平又会导致风能利用率降低,弃风现象严重,造成浪费。因此,参与系统调频的风电机组可选择20%的减载水平,既保持了较高的风能利用率,又保证了机组参与调频的能力。
1.2 转速调节系数对调频的影响
系统惯性反映了其阻止频率突变的能力,大规模风电机组接入电网,势必导致系统惯性降低,调频能力不足。因此,为了增强系统阻止频率突变的能力,要求风电机组具备惯性支持能力。在负荷突变时,变速风电机组通过惯性控制可以快速调节电磁功率,控制机组释放或存储旋转动能,实现对系统频率的惯性支持,减小扰动初期的频率变化量,提高系统频率稳定性及风电接入水平。
采用基于功率跟踪优化的虚拟惯性控制,在频率突变时,通过优化最大功率跟踪曲线比例系数kopt,平稳的切换功率跟踪曲线,控制机组运行点变化,快速调节风电机组有功输出,从而使风电机组表现出惯性特征。惯性控制下,优化后的功率跟踪曲线的比例系数 k′opt的计算如下所示[4]:

式中ωr0为风力机初始角速度;η为转速调节系数:η=Δωr/Δωe,Δωr为角速度增量,Δωe为系统同步角速度增量。
由式(4)可知,优化后的功率跟踪曲线的比例系数k′opt与转速调节系数η有关,即虚拟惯性的大小受到η的影响。结合式(4)及实际运行工况,可得转速调节系数η与系统扰动初期的最大频率波动值Δf的关系,如表2所示。通过曲线拟合得到减载水平与最大频率波动值的关系曲线,如图2所示。
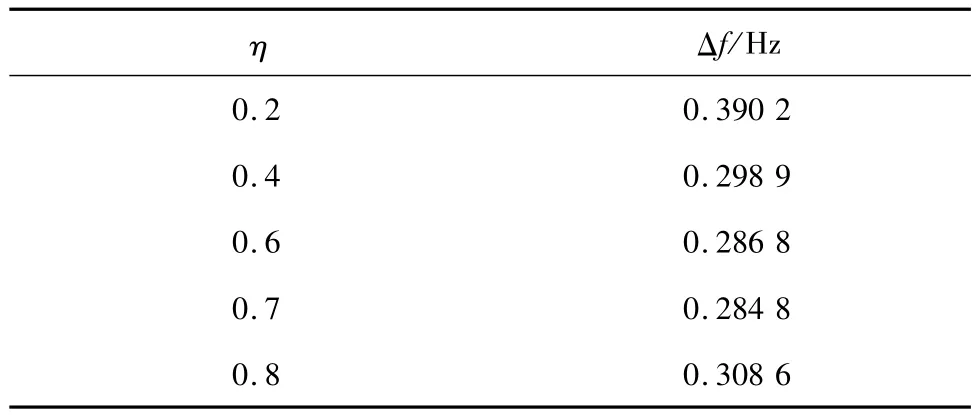
表2 不同转速调节系数下的最大频率波动值Tab.2 Maximum frequency fluctuation value with different speed adjusting coefficients

图2 转速调节系数与最大频率波动值的关系Fig.2 Relationship between the speed adjusting coefficient and themaximum frequency fluctuation
由图2可得,在一定范围内,随着转速调节系数的增大,系统的惯性响应能力越强,频率的最大波动值越小,对系统的稳定越有利。但是,当转速调节系数超过0.7后,系统的最大频率波动会迅速增大,造成系统频率的二次波动,不利于系统稳定。因此,在实际中通过调节η的大小可以使风电机组表现出各种可控的惯性响应,但应在保证转速调节系数小于0.7的情况下对η进行合理的整定,降低负荷波动初期系统频率的变化率,达到较好的频率控制效果,满足系统频率的要求。
1.3 静调差系数对调频的影响
为了提高电网接纳风电的能力,需要风电自身也具有一次调频能力。采用整定静调差系数法的一次调频控制方案,通过改进传统的变桨距角控制方法,完成一次调频。根据机组的调频能力以及运行状态,通过引入桨距静调差系数σβ,整定出风电机组的静调差系数σf,使风电机组的功频静特性与常规发电机组相似,从而使得各风电机组以及传统同步发电机组,统一根据系统频率变化量,自然分配系统内的负荷增量[13]。
风电机组正常和减载运行时,对应的静调差系数σf、与桨距静调差系数σβ的关系为:

初始运行在风速为7 m/s情况下,选取风电机组的静调差系数分别为 0.03、0.05和 0.08时,仿真可得到在不同静调差系数下的风电机组的一次调频能力,如表3所示。表3中,t为桨距角调节到限定桨距角(本文限值设定为8°)所需的时间。
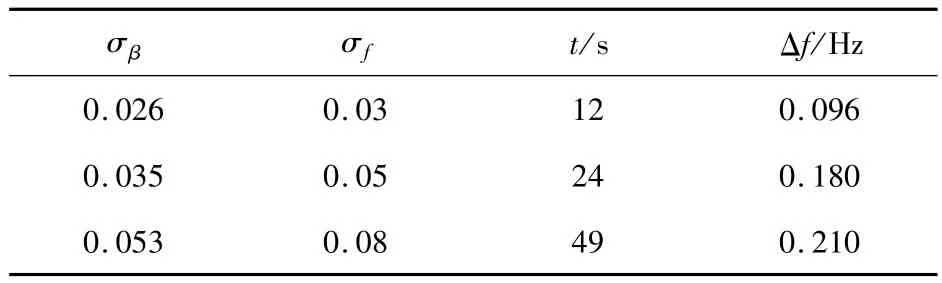
表3 不同静调差系数下的一次调频能力Tab.3 Primary frequency regulation capability with different static frequency difference coefficients
静调差系数反映了风机参与调频的速度。根据机组当前的运行状态及调频容量,引入桨距静调差系数σβ,从而整定出合理的静调差系数σf,可使机组在一次调频过程中,有效分担引起系统频率变化的不平衡功率。静调差系数大小对维持系统频率稳定具有重要影响。静调差系数越小,风电机组对频率变化的响应越灵敏,桨距角和功率的调节速度越快,因此在频率波动后,相同的时间内,机组承担的不平衡功率越多,完成频率调整的响应速度越快,发电机组调频能力越强,更易保证频率稳定。但在实际运行中,过小的调差系数可能导致系统内各个发电机间负荷分配不合理。因此在实际运行时,应根据电网的要求,整定出合理的风电机组的静调差系数,将负荷增量协调分配至风电场和常规电厂,进而完成频率的一次调整。
2 不同参数下的仿真分析
2.1 系统简介
本文利用MATLAB/Simulink仿真软件建立了如图3所示的仿真系统,该系统包含两个容量分别为1 000 MVA和 400 MVA的火电厂(G1、G2),和一个风电场G3(300台2 MW永磁直驱风电机组)。负荷L1、L2和 L3为有功负荷,容量分别为800 MW、500 MW和300 MW。仿真结果中功率、转速等均采用标幺值,选取各个发电厂的额定容量为其功率基值。仿真分析时,风电场和火电厂均视为等值机组,系统仿真参数详见附录A。
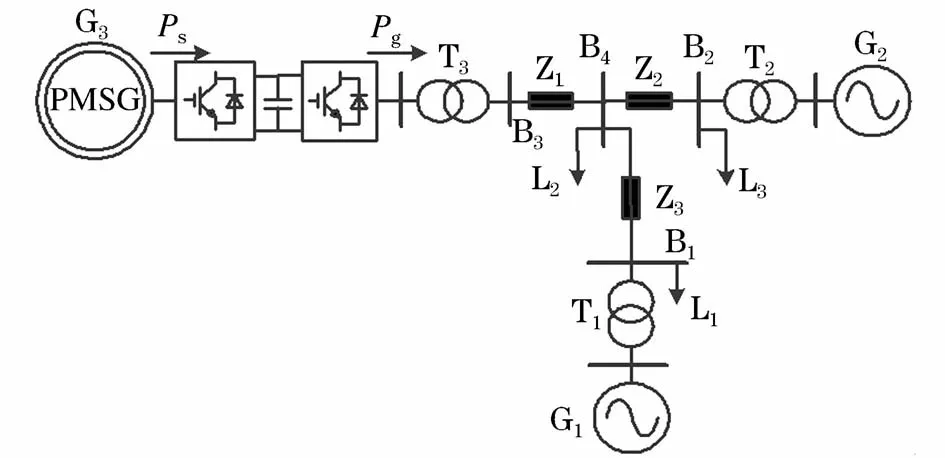
图3 仿真系统结构图Fig.3 Simulation system structure diagram
2.2 不同减载水平下的仿真
仿真过程中,风速为7 m/s,负荷L1在5 s时刻由800 MW突增至900 MW。在所提追踪最大功率点轨迹的减载运行方案下,通过设定不同的初始桨距角,分析系统扰动后,不同减载水平下的系统调频特性。
仿真结果如图4所示,分别为采用不同初始桨距角的情况下,系统频率、桨距角、风电机组有功输出的动态对比。
如图4所示,以β=4.5°为例,初始时刻风电机组输出功率约为0.24 pu。系统扰动后,风电机组在一次调频的作用下,释放有功备用,桨距角由4.5°不断减小至0°,导致风能利用率不断增大,从而使风电机组有功输出增加,并稳定在0.34 pu。因此,在一次调频过程中,风电机组利用备用容量分担了系统约0.1 pu的不平衡功率,频率最终稳定在49.9 Hz左右。

图4 不同初始桨距角下系统的动态响应对比Fig.4 Comparisons of network dynamic responses with different initial pitch angles
由图4可以看出,在系统频率突减时,桨距角逐渐减小为0,风能利用率逐渐增高,为系统提供频率支持。初始桨距角越大,风电机组初始状态下的有功输出越小,在桨距角减小为0的过程中增发的有功功率越多,即预留出来的有功备用越多,从而在频率变动后,可以提供更多的功率支持。因此,应在保证风能利用率的前提下,合理设置机组的减载水平,减小系统的稳态频率偏差。
2.3 不同转速调节系数下的仿真
仿真过程中,风速为7 m/s,负荷L1在5 s时刻由800 MW突增至900 MW,导致系统频率降低。在所提基于功率跟踪优化的虚拟惯性控制策略下,通过设定不同的转速调节系数η,分析系统扰动初期,在不同转速调节系数η的情况下,系统阻止频率突变的能力。
仿真结果如图5所示,分别为采用不同转速调节系数η的情况下,系统频率、风电机组有功输出、风力机转速、以及G1有功输出的动态对比。
如图5所示,以η=0.4为例,变速风电机组在所提虚拟惯性控制策略下,在频率变化初期时,风电机组对系统快速提供有功支持,其输出功率瞬时增加约0.05 pu,分担了G1承受的不平衡功率,而风电机组转子转速下降幅度约为0.1 pu,释放出机组储存的动能,实现了对系统的惯性支持。在频率恢复的过程中,风电机组功率输出未出现波动,系统频率恢复特性平稳,风电机组最终平滑的过渡到稳定状态。
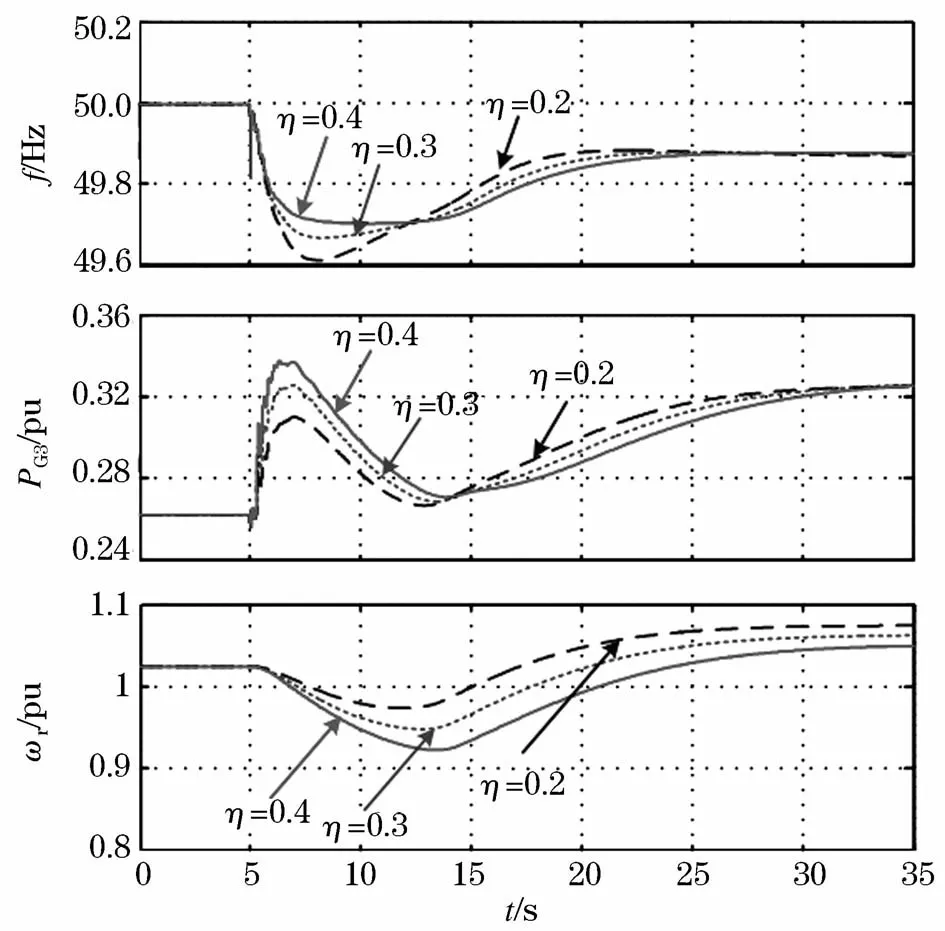
图5 不同转速调节系数下系统的动态响应对比Fig.5 Comparisons of network dynamic responses with different speed adjusting coefficients
由图5可以看出,在所提虚拟惯性控制下,风电机组可以通过转速调节系数,实现频率动态过程中可控的虚拟惯性响应。在频率变动初期,η的值越大,风电机组分担了的系统不平衡功率越多,其转速偏离初始转速值越远,释放出更多的动能,从而虚拟出更大的惯性。由系统频率的动态响应可以看出,虚拟惯性越大,系统频率的下降幅度越小,但完成惯性响应后频率的恢复速度也相应降低。如图5所示,与η=0.2相比,η=0.3时,系统频率降低幅度更小,最大频率偏差由0.4 Hz减小为0.33 Hz,但其恢复速度也相对较慢,而η=0.4时,系统频率降低幅度最小,最大频率偏差约为0.3 Hz,但频率恢复时间也更长,因此,在实际运行时,变速风电机组应根据电网运行需求,合理整定转速调节系数,控制自身的惯性响应,进而满足系统频率要求。
2.4 不同静调差系数下的仿真
仿真过程中,减载水平设为20%,桨距角最大限值为8°,风速为7 m/s,负荷L1在3s时刻由800 MW突减至700 MW,导致系统频率上升。为验证不同静调差系数对系统调频特性的影响效果,仿真中选取的桨距静调差系数和相应的静调差系数如表4所示。

表1 风电机组的桨距静调差系数和静调差系数Tab.1 Pitch static difference coefficients and static difference coefficients ofwind turbines
如表4所示,仿真案例中σβ分别设定为0.026、0.035、0.053,根据风电机组设定的调频容量,即桨距角达到限值时的功率变化量,由式(5)可计算出其静调差系数 σf的预期值应分别为 0.03、0.04、0.06。不同静调差系数下系统的动态响应对比如图6所示。

图6 不同静调差系数下系统的动态响应对比Fig.6 Comparisons of network dynamic responseswith different static frequency difference coefficients
由图6可以看出,以σf=0.03为例,变速风电机组在所提一次调频控制策略下,在负荷突减,频率突然增大后,通过增加桨距角来降低风能利用率。随着桨距角的不断增加,风机的输出功率在10 s后不断减小,桨距角在15 s时达到最大值,有效分担了G1承受的不平衡功率,从而参与了对系统频率的一次调整。在频率恢复的过程中,系统频率平稳恢复,并最终过渡到稳定状态。
如图6所示,在一次调频过程中,σf的值越小,桨距角和功率调节速度越快,风电机组的频率调整能力也随之增强,短时间内能够更快分担更多的系统不平衡功率,加速系统频率的恢复过程。由系统的频率响应可以看出,σf不影响频率的最大频率偏差,只能加快频率的恢复过程,并在调频容量足够的情况下,减小稳态频率偏差。如图所示,与σf=0.03相比,σf=0.05时,系统频率的恢复速度明显变慢,桨距角在27 s左右时才增加到最大角度8°,比σf=0.05时桨距角调整完成的时间慢了约12s,频率也在约35 s时才逐渐稳定在50.08 Hz左右,而 σf=0.08时,系统频率调整速度最慢,但由于调频容量有限,随着桨距角的增大,系统频率最终也将稳定在50.08 Hz。
综上所述,在采用整定静调差系数法的一次调频控制策略下,风电机组可以通过设定不同的桨距静调差系数,整定出相应的静调差系数,从而调节桨距角对频率的响应速度,得到不同的一次调频能力。在实际运行中,应综合考虑风电机组与常规机组的调频容量,设定合理的静调差系数,协调分配机组的不平衡功率,提高静态频率稳定性。
3 结束语
为了进一步提高系统的频率质量,本文从虚拟惯性、减载、一次调频控制的角度找出了影响调频的控制参数,并定量分析各控制参数的大小对频率特性的影响。通过理论分析和仿真分析得出如下结论:
(1)减载运行为一次调频提供了必要的备用容量,减载水平越大,机组的有功备用就越多,在负荷突增时可以为系统长期提供的功率支持越大,对调频的贡献越大,减小稳态频率偏差。但减载水平过大,也会造成风能利用率降低,造成浪费。因此参与系统调频的风电机组可选择20%的减载水平,既保持了较高的风能利用率,又保证了机组参与调频的能力;
(2)对于基于功率跟踪优化的虚拟惯性控制,转速调节系数η的大小反应风机惯性响应能力的大小,通过调节η可获得可控的惯性响应。当η<0.7时,η越大,风机虚拟惯性响应能力越强,扰动初期的最大频率偏差越小,但是系统频率恢复稳定的时间也响应增长,应综合考虑最大频率偏差和频率恢复稳定的时间,设置合理的转速调节系数;当η过大时,会造成系统频率二次波动,动态频率响应不断恶化;
(3)在一次调频控制中,静调差系数反映了风机参与调频的快慢,静调差系数越小,风电机组对频率变化的响应越灵敏,桨距角和功率的调节速度越快,完成频率调整的时间越短。但过小的调差系数可能导致系统内各个发电机间负荷分配不合理。因此,应根据电网要求合理设置静调差系数,各机组间协调分配不平衡功率。
附录A仿真系统参数

表A1 2 MW永磁同步发电机参数Tab.A1 Parameters of the 2 MW PMSG
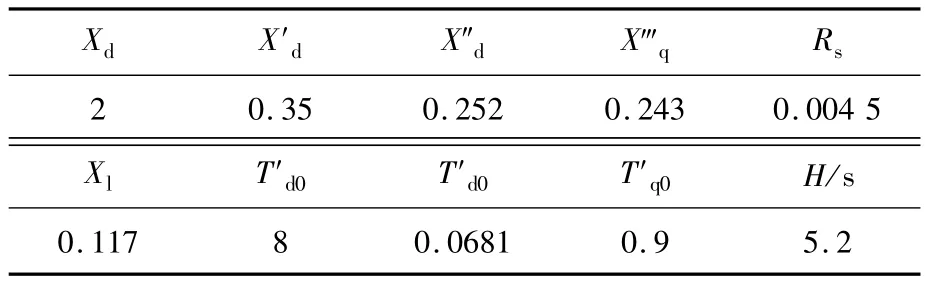
表A2 同步发电机G1参数Tab.A2 Parameters of the G1
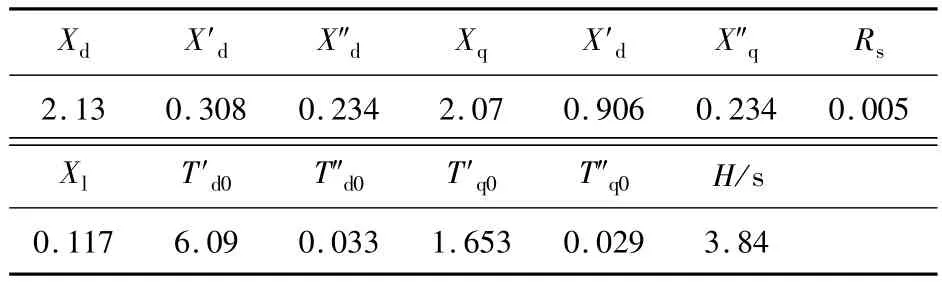
表A3 同步发电机G2参数Tab.A3 Parameters of the G2
