一种基于MAD的地磁匹配导航方法
2017-12-18张妍典
王 闯,贺 莹,张妍典
(中航工业西安航空计算技术研究所,陕西 西安 710119)
一种基于MAD的地磁匹配导航方法
王 闯,贺 莹,张妍典
(中航工业西安航空计算技术研究所,陕西 西安 710119)
充分发挥地磁匹配导航方式的优点,引入在图像处理领域广泛采用的互相关匹配概念,提出一种基于二维最小绝对差累加和算法(MAD)的地磁匹配导航方法。通过地磁传感器实时采集运载体附近的地磁信号获取地磁检测序列,将检测序列作为匹配模板在地磁数据库中进行MAD相关计算,获取每一点的地磁强度量值绝对差累加和,地磁数据库中绝对差累加和最小点的位置就是运载体当前坐标的最佳匹配点,由此获取位置导航参数。仿真结果表明,该方法具有较高的定位精度,匹配点的相关峰尖锐,动态定位效果较好。
二维最小绝对差累加和算法;地磁导航;模板匹配
0 引言
地磁导航具有无源、无辐射、全天时、全天候、全地域、能耗低的优良特征,在近些年获得了快速的发展。尤其在军事领域,与卫星导航等有源制导和导航方式相比,使用地磁制导的导弹、无人机等武器装备抗干扰性能更强, 突防能力更突出。因此,地磁导航技术越来越成为学术界关注的对象和世界上主要军事大国重点资助的研究方向。按照地磁数据处理方式的不同, 地磁导航分为地磁匹配与地磁滤波两种方式。地磁滤波在等磁线变化较为丰富的区域用于修正导航偏差较为有效,但是对初始误差要求较高;地磁匹配导航虽然需要存储大量的地磁数据,但是导航不存在误差积累,具有较高的匹配精度和捕获概率, 是一种较方便灵活的匹配方式[1]。基于此,本文充分发挥地磁匹配导航方式的优点,并引入在图像处理领域广泛采用的互相关匹配概念,提出一种基于二维最小绝对差累加和算法(MAD)的地磁匹配导航方法,该方法通过地磁传感器实时采集运载体附近的地磁信号获取地磁检测序列,将检测序列作为匹配模板在地磁数据库中进行MAD相关计算,获取每一点的地磁强度量值绝对差累加和,地磁数据库中绝对差累加和最小点的位置就是运载体当前坐标的最佳匹配点,由此可获取运载体当前的位置信息。
1 地磁匹配导航系统架构
地磁匹配导航系统架构如图1所示。
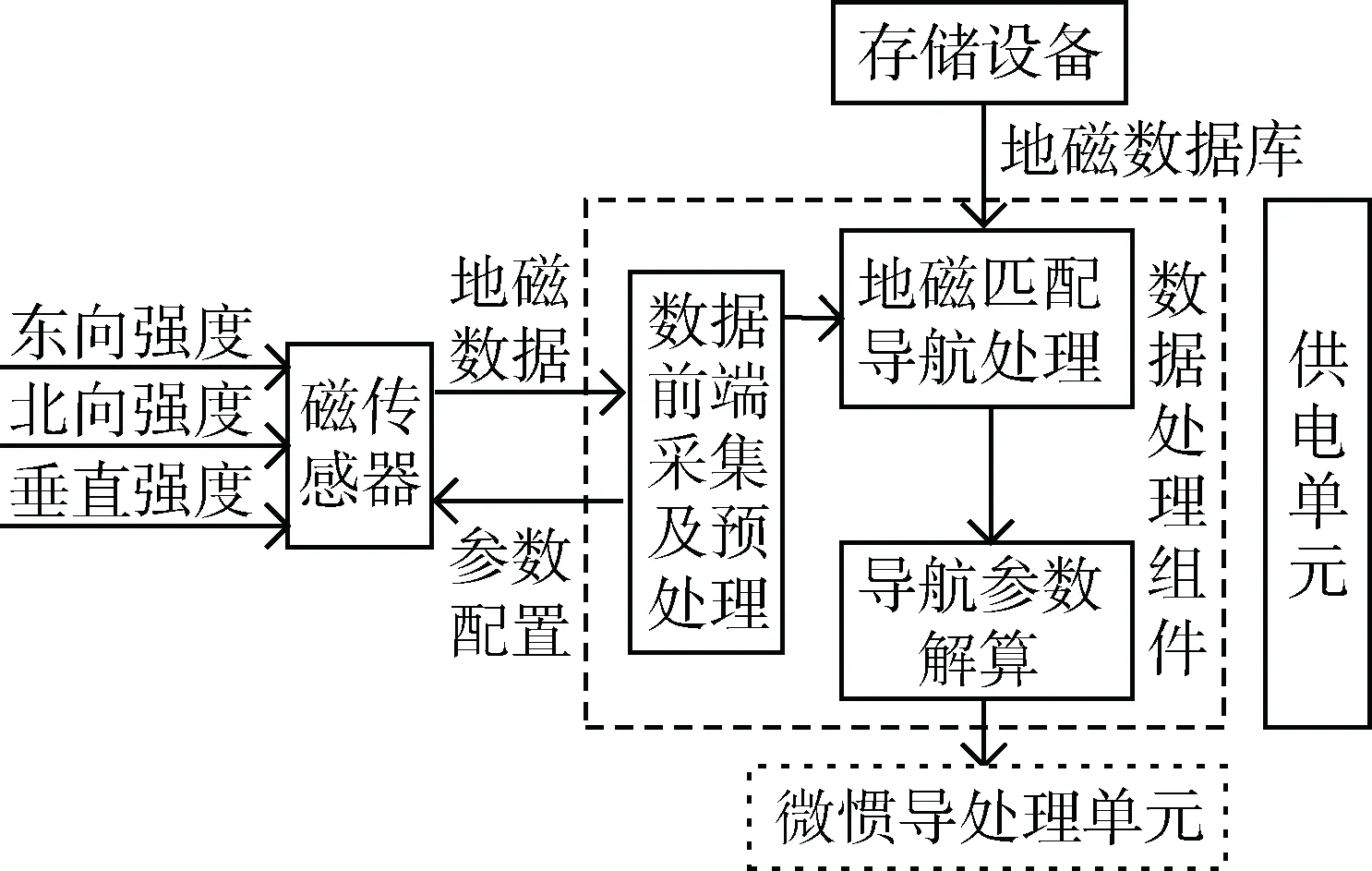
图1 地磁匹配导航系统架构图
地磁辅助导航系统由磁传感器、数据处理组件、存储器、供电单元及其他相关辅助电路组成。磁传感器选用飞思卡尔或霍尼韦尔等公司的成品元器件;存储器作为地磁数据库,存储目标区域的地磁图;数据处理组件采集磁传感器输出的各向场强等地磁数据,进行野值剔除及滤波处理,获取地磁检测序列,然后与从电子盘读取的地磁数据库进行MAD相关匹配处理,当检测序列与地磁数据库中的地磁信号特征匹配时,输出位置等相关导航参数到信息融合处理单元。
2 基于MAD算法的地磁匹配导航过程
地磁匹配导航的流程如图2所示。

图2 地磁匹配导航流程图
(1)地磁匹配特征量选取方法
根据获取的地磁导航应用区域的采集样本,对总磁场强度F(X1)、水平强度H(X2)、东向强度Y(X3)、北向强度X(X4)、垂直强度Z(X5)、磁偏角D(X6) 和磁倾角I(X7)7个指标进行K-means初步聚类分析,然后对K个聚类进行主成分分析,依据特征值大于1的原则,提取各自的主成分,从而得到最终的地磁匹配特征量[2]。
(2)地磁信号去噪及滤波预处理
根据海洋、沙漠、森林、城市等不同应用场景下地磁杂波以及人为因素对地磁信号的影响情况,选用维纳滤波、Kalman滤波等算法进行噪声去除及滤波预处理。
(3)基于MAD算法地磁匹配导航处理
MAD是一种简单而有效的图像相关匹配算法,但在图像匹配过程中,由于不同天气条件下光照情况不同,不同季节地表覆盖物的灰度不同,以及山地、建筑物的相互遮挡等因素影响,实时获取的图像与基准参考图在灰度和位移特征等方面具有显著差异,从而影响匹配精度和可靠性[3]。而地磁匹配则不受这些因素的影响,因此将MAD算法用于地磁匹配导航具有重要的工程和实用价值。
设Si,j代表地磁数据库中某点的磁场强度值,Mi,j代表当前检测模板序列中该点的磁场强度,模板大小为M×M。MAD算法的思想是,将模板在地磁图内滑动,在每个位置处求取磁场强度Si,j与Mi,j的绝对差:
(1)
由此得到整个检测区域的一个相关曲面,整个相关曲面最小值所在的位置就是匹配点。
(4)地磁匹配导航定位精度分析
磁传感器在实际应用中,由于受到加工工艺和装配精度水平的限制,低成本的三轴磁传感器很难做到三轴严格正交,而且三轴灵敏度及其他电气性能也不可能完全对称。
同时,还存在零点漂移、传感器内部剩磁、地磁信号采集精度、地磁图分辨率及人为因素变化的干扰,这些都将对磁场的精确测量产生负面影响,甚至造成很大的误差。
这就需要在投入使用之前,对三轴传感器进行参数标定,尽可能克服由装配工艺和三轴电器参数不严格一致而产生的测量误差,并通过野值剔除和误差补偿等手段进行地磁去噪处理。
3 仿真分析
采用上述方法搭建测试系统验证所提出的地磁匹配导航算法,获得匹配的相关峰曲面图如图3所示。

图3 MAD算法地磁匹配相关曲面图
由图3分析可见,本文所提出的算法有比较尖锐的相关峰,因此可以通过匹配识别出跟踪目标的中心位置。
4 结论
本文充分发挥地磁匹配导航方式的优点,并引入在图像处理领域广泛采用的互相关匹配概念,提出一种基于MAD的地磁匹配导航方法。该方法通过地磁传感器实时采集运载体附近的地磁信号获取地磁检测序列,将检测序列作为匹配模板在地磁数据库中进行MAD相关计算,获取每一点的地磁强度量值绝对差累加和,地磁数据库中绝对差累加和最小点的位置就是运载体当前坐标的最佳匹配点,由此可获取运载体当前的位置信息。
[1] 傅慷,余杰,钱富. 地磁导航的相关技术研究[J]. 航电技术, 2013,33(4): 31-33.
[2] 王向磊. 地磁匹配导航中匹配量的选择[J]. 测绘工程, 2011,20(5): 1-3.
[3] 程传奇,郝向阳,刘松林. 基于改进型MAD算法的地形辅助惯性导航[J]. 电子测量技术, 2015,38(4): 6-9.
A kind of geomagnetism matching navigation algorithm based on MAD
Wang Chuang, He Ying, Zhang Yandian
(Xi’an Aeronautics Computing Technique Research Institute, AVIC, Xi’an 710119, China)
To make full use of the advantages of geomagnetic matching navigation methods, this paper proposes a kind of geomagnetism matching navigation algorithm based on MAD, which is widely used in the field of image matching processing. In this method, geomagnetic signals near the carrier are obtained in real time and collected in sequence. The detection sequence is used as the matching template, the MAD correlation calculation between the detection sequence and each location in the geomagnetic database is carried out to obtain the geomagnetic intensity value, the point with the minimum value of absolute difference summation is the best matching points of the current vehicle location. Simulation results show that the proposed method has higher positioning accuracy, sharp correlation peaks and better dynamic positioning effect.
minimum absolute deviation algorithm (MAD); geomagnetism navigation; template matching
V249.31
A
10.19358/j.issn.1674- 7720.2017.23.024
王闯,贺莹,张妍典.一种基于MAD的地磁匹配导航方法[J].微型机与应用,2017,36(23):84-85.
2017-06-14)
王闯 (1986-),男,硕士研究生,工程师,主要研究方向:嵌入式计算机系统,数字信号处理。
