基于ADAMS的花生收获机清选装置设计与仿真研究
2017-12-16郭巧惠
张 莉,郭巧惠,徐 嘉
( 1.武汉晴川学院,武汉 430064;2.福建农林大学 金山学院,福州 350001)
基于ADAMS的花生收获机清选装置设计与仿真研究
张 莉1,郭巧惠2,徐 嘉1
( 1.武汉晴川学院,武汉 430064;2.福建农林大学 金山学院,福州 350001)
花生清选分离是花生收获机作业过程中最重要的项目之一,是收获机的核心部件,其性能的好坏直接关系到收获机的作业质量,其主要的指标是含杂率与损失破碎率。为了提高花生清选分离装置的设计效率、缩短设计周期,提出了一种基于ADAMS的花生收获机清选装置虚拟设计和仿真方法,并对核心部件做了重点设计,包括轮轴和星型轮。利用非自由质点坐标系和广义坐标系,结合拉格朗日方程的位置和速度约束,建立了清选装置的机械系统运动学微分方程。使用ADAMS软件对不同转速条件下的轮轴工作效果进行了动力学仿真,得到了3种不同速度下的Y轴速度曲线,通过比较曲线的震动效果,选择合适的轮轴转速,对花生收获机的优化设计具有重要的借鉴意义。
花生收获机;清选装置;虚拟仿真;ADAMS软件;星型轮
0 引言
花生是我国重要的农作物,但长期以来都是使用人力对花生进行收获,并将果实进行人工采摘,耗费了大量人力,并且效率低。随着农业生产机械化水平的提高,花生自动收获也逐渐成为可能;但花生自动收获机还处于初始研究阶段,技术还不成熟,尤其是我国对于花生收获装置的研究还没有取得显著性的进展,其技术瓶颈是花生的清选分离装置。花生清选装置的分类主要包括风选、筛选及比重选等形式,由于花生和其他谷物类的形状不同,决定了花生清选分离装置需要不同的特征形状。本研究主要采用ADAMS软件对花生清选装置进行虚拟仿真,可以有效地提高装置的设计效率,缩短设计周期,从而实现清选装置的优化设计。
1 总体结构及工作原理
花生的清选分离装置是将花生果实以外的茎秆和枝叶等进行分离,是花生收获的一个非常重要的作业步骤,是花生收获机的核心部件,对花生收获机的工作质量起到决定性的作用。花生分离装置主要利用星型轮的作用对花生收获机的混合物进行分离,星型轮的运动方式为旋转运动。在花生采摘混合物前进过程中,在星型轮的作用下,花生和混合物分离,并从星型轮的间隙漏下,而茎秆和枝叶沿着星型轮的方向排出,其结构原理如图1所示。

1.星型轮 2.轮轴图1 星型轮轴结构原理图Fig.1 The structure schematic diagram of star wheel axle
星型轮的结构为圆弧结构,可以降低齿轮对花生的作用力,避免造成果实伤害。在轮轴方向并行地分布了很多星型轮,将混合物的茎秆和枝叶分离出来,达到一级清选的目的。星型轮和轮轴是清选装置的关键部件,可以根据花生分离混合物的特征,从星型轮的旋转速度、几何尺寸、几何形状及排列方式等方面进行研究设计,并建立关键部件的虚拟样机模型,其流程如图2所示。首先通过Pro/E软件建立装置的虚拟样机实体模型,然后在ADAMS软件中建立ADAMS和Pro/E的接口MECHANISM/Pro;将建立好的实体模型转到ADAMS/Vie模块中,在ADMSA软件中对虚拟样机模型施加边界条件约束,并重点对星型轮和轮轴的动力特性进行验证,使其工作流程和实际生产相结合,输出满意的计算结果,从而达到优化设计的目的。
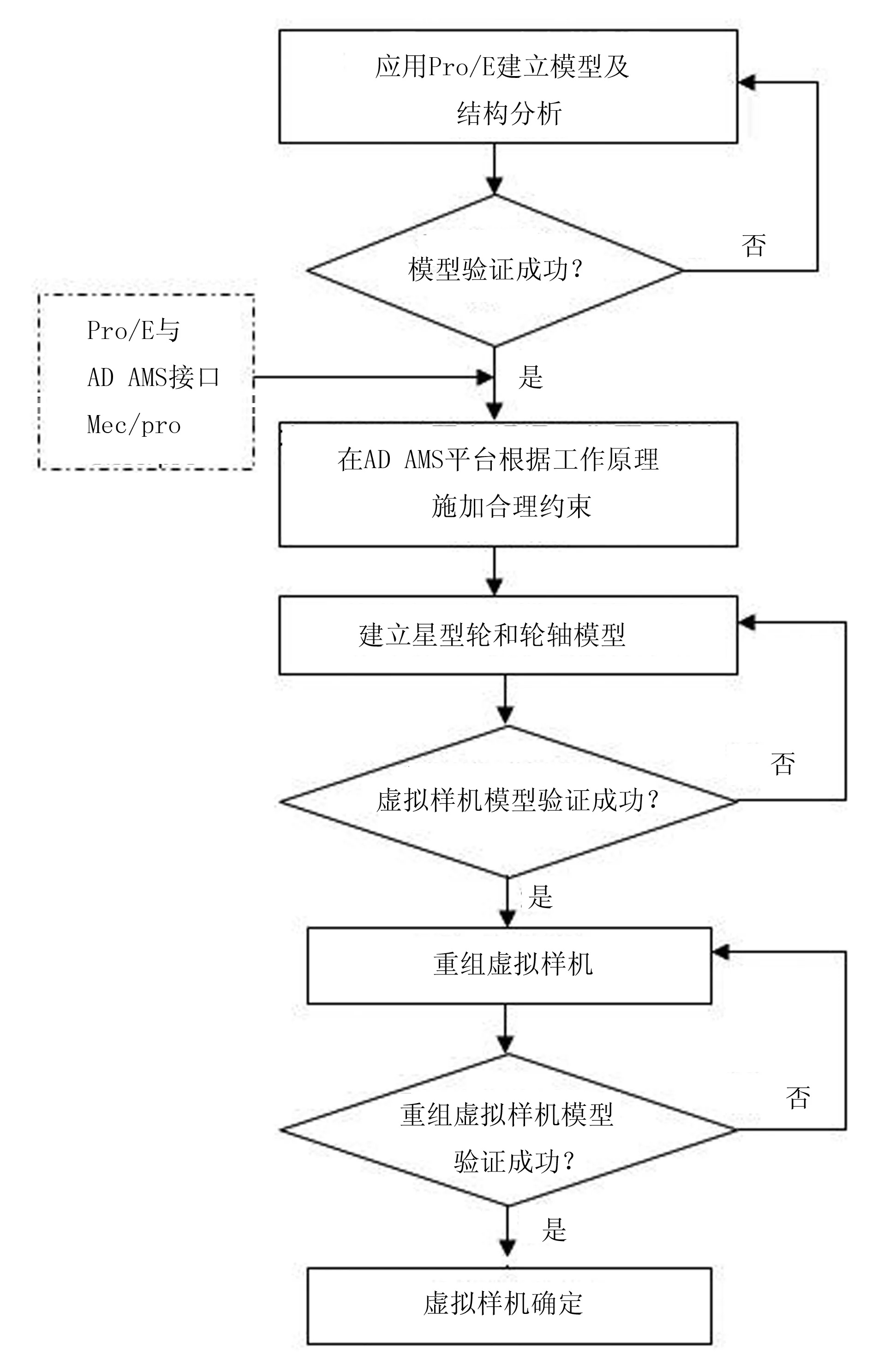
图2 虚拟样机模型建立的流程Fig.2 The process of virtual prototype model
2 基于ADAMS的机械系统动力学方程
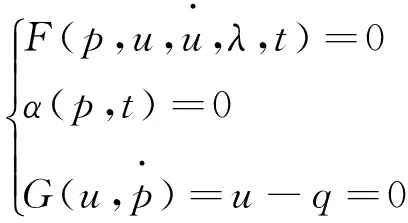
花生收获机清选装置虚拟样机模型的机械系统可以使用非自由质点坐标系来表示,然后使用广义坐标系表示动力学方程,从而可以得到拉格朗日方程,在方程上进行位置和速度约束,便可以建立清选装置的机械系统运动学微分方程。对于ADAMS软件,可以用刚体j的直角坐标和欧拉角作为广义坐标,则广义坐标可以表示为pj=[x,y,z,ψ,φ,φ]jT,则对于n个运动系统,则有p=[p1,p2,...,pn]T,则清选装置机械系统的运动微分方程可以表示为
(1)
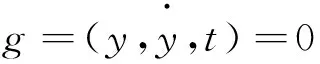
其中,D表示整个系统的动能;Q表示广义力矩阵;p表示广义坐标的列阵;ρ表示完整拉格朗日乘子列阵;μ表示非完成约束的拉格朗日乘子列阵;φ(p,t)=0表示完整约束方程,ф(q,q,t)=0表示非完整约束方程。令μ-p=0,将式(1)降阶为一阶代数微分方程,其表达式为
(2)

(3)
ADAMS对于微分方程的求解默认使用的是GSTIFF积分器,该积分器采用Gear积分和泰勒级数,在t时刻对tn+1时刻的状态向量y和yn+1进行预测,可以通过六阶插值多项式推导得到,则有
(4)
(5)

(6)
迭代校正的公式为
(7)
其中
Δpk=pk+1-pk;Δuk=uk+1-uk;Δλk=λk+1-λk
(8)
由式(5)可得
(9)
由式(6)可得
∂G/∂p=(1/hβo)I ∂G/∂u=I
(10)
将式(9)与式(10)代入到式(7)可得
(11)

3 花生收获机清选装置虚拟设计和仿真
为了实现花生收获机清选装置的优化,本研究采用ADAMS软件作为虚拟仿真计算工具,并采用Pro/E软件建立清选装置的模型。建立好的模型保存为Parasolid(*x-t)格式,并保存在一定的文件目录下;然后在ADAMS/View模块中,选择Import a file,从保存的目录文件下选择建立的装置模型,点击ok便可以导入模型,其界面如图3所示。
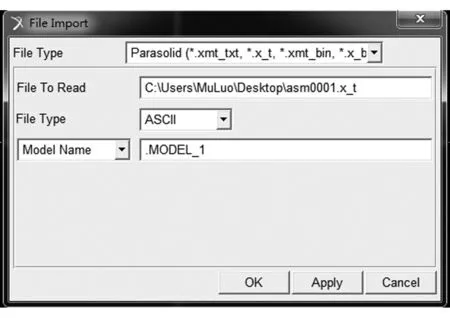
图3 ADAMS导入Pro/E模型的过程Fig.3 The process of introducing Pro/E model into ADAMS
导入模型后需要对模型的材质进行设置:轮轴采用钢结构材料,选择steel材质;星型轮采用PVC材料,由于软件中缺少这种材料,所以可以选择Geometry and Density,将其密度设置为1600.0(kg/meter**3),如图4所示。

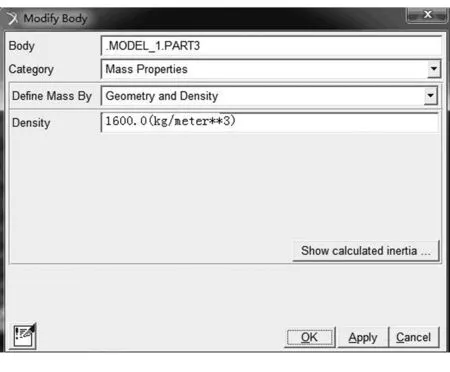
图4 星形轮和轮轴材质设置Fig.4 The material setting of the star wheel and axle
修改旋转副的速度时,可以点击Modify,从而得到Motion设置栏,在Function(time)一栏中可以改变转速,将转速改为100r/min和300r/min,通过计算可以得到不同转速条件下Y向的速度随时间变化曲线。
图5表示转速为200r/min时Y轴向速度随时间变化曲线。为了完成清选工作,轮轴在运动时需要上下振动,相当于日常的筛子,通过震动可以将花生更加容易地震落。理论上震动的幅度越大越好,但过大也可能造成花生果实的损伤。由图5可以看出:当转速为200r/min时,Y轴方向有明显的震动幅度,但是震动的幅度较小。
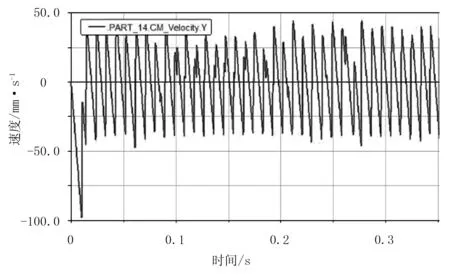
图5 转速200r/min时Y轴向速度Fig.5 Y-axial velocity at the speed of 200r/min
图6表示转速为100r/min时Y轴向速度随时间变化曲线。由图6可以看出:当转速为100r/min时,Y轴方向有明显的震动幅度,但是通转速为200r/min相比,震动幅度更小。
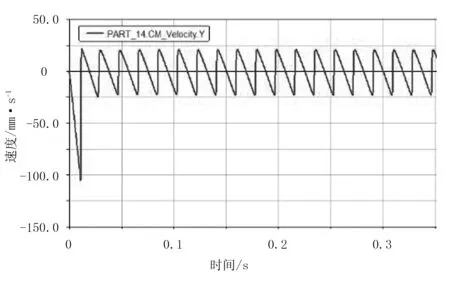
图6 转速100r/min时Y轴向速度Fig.6 Y-axial velocity at the speed of 100r/min
如图7所示,转速为300r/min时轮轴的振动相比之前转速为100r/min和200r/min时震动的要剧烈;但在振动剧烈后轮轴Y向速度幅度虽然有所提高,但震动不太稳定,整个过程的振幅不能保持一致,振动密度不均衡。相比而言,还是选择转速为200r/min而言效果要好一些。
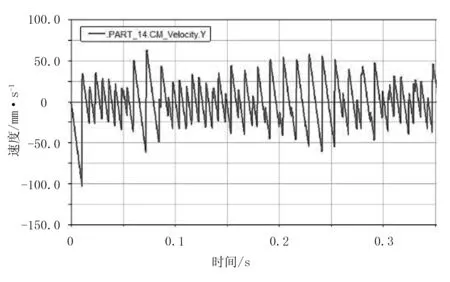
图7 转速300r/min时Y轴向速度Fig.7 Y-axial velocity at the speed of 300r/min
4 结论和讨论
由于花生和其他谷物类的形状不同,决定了清选分离装置需要不同的特征尺寸,本研究提出了一种基于ADAMS软件的虚拟优化仿真方法,以提高花生清选分离装置的设计效率,缩短设计周期。利用该方法对清选装置的核心部件进行了重点设计,包括轮轴和星型轮。利用非自由质点坐标系和广义坐标系,结合拉格朗日方程建立了清选装置的机械系统运动学微分方程。使用ADAMS软件对不同转速条件下的轮轴工作效果进行了动力学仿真,得到了3种不同速度下的轮轴的震动效果,为清选装置的优化设计提供了技术参考。由于计算条件和篇幅的限制,本研究还未对更多的转速条件及其他轴的速度展开研究,在今后的研究中还需要展开更多的虚拟仿真计算,通过结果对比,真正意义上实现清选装置的全面优化。
[1] 王升升,师清翔,倪长安,等.旋风分离清洗系统阻力特性及工况的试验研究[J].河南科技大学学报:自然科学版,2011,32(4):53-56.
[2] 李洪昌,李耀明,唐忠.风筛式清洗装置清选性能试验研究[J].中国农机化,2010(6):54-57.
[3] 唐忠,李耀明,李洪昌,等.联合收获机风筛式清选装置清选室内涡流试验[J].农业机械学报,2010,41(12):62-66.
[4] 卢勇涛.李成松.陈永成,等.番茄收获机果实分离机构的工作原理及结构特点[J].新疆农机化,2008 (4):11-13.
[5] 张晓桂.新型分离清洗装置的试验研究[J] .农业机械学报,2002(3):47-49.
[6] 王科俊,魏娟.基于共面圆的双目立体视觉分步标定法[J].应用科技,2010,37(1):36-39.
[7] 佟帅,徐晓刚,易成涛.基于视觉的三维重建技术综述[J].计算机应用与研究,2011,28(7):2412-2417.
[8] 德启科.使用水稻收获机械的技术要点分析[J].农业科技与装备,2012(1):58-59.
[9] 尹健,杨宁,王妍.基于结构模块化的微型山地稻麦联合收割机设计[J].农机化研究,2011,31(11):106- 109.
[10] 李银海,丁启朔,罗海兵,等.微型联合收割机气流式清选装置的仿真研究[J].农机化研究,2009,31(1):85-88.
[11] 倪长安,张利娟,刘师多,等.无导向片旋风分离清选系统的试验分析[J].农业工程学报,2008, 24(8):135-138.
[11] 王文庆,张涛,龚娜.基于多传感器融合的自主移动机器人测距系统[J].计算机测量与控制,2013,21 (2):343-345.
[12] 韦伟,周凌翱,刘青.一种便携式的红外测距系统[J].电子设计工程,2011,19(21):40-42.
[13] 刘金帅,赖惠成,贾振红.基于YCbCr颜色空间和Fisher判别分析的棉花图像分割研究[J].作物学报,2011,37(7):1274-1279.
[14] 朱群峰,黄磊.温室移动机器人轨迹控制系统的设计[J].农机化研究,2009,31(4):73-75.
[15] 张卫东.我国温室发展的现状及发展建议[J].科技信息,2013(10):439.
[16] 李明,李旭,孙松林,等. 基于全方位视觉传感器的农业机械定位系统[J].农业工程学报,2010,26 (2):170-174.
[17] 傅锡敏,薛新宇.基于我国施药技术与装备现状的发展思路[J].中国农机化,2008(6):72-76.
[18] 傅泽田,祁力钧,王俊红.精确施药拉术研究进展与对策[J].农业机械学报,2007,38(1):189-192.
[19] 郭辉,韩长杰.精确施药技术的研究与应用现状[J].农业技术与装备,2009(10):42-46.
[20] 吕太国.静电喷雾系统特性研究[J].农机化研究, 2009,31(5):54-70.
[21] 燕明德,贾卫东,张斌,等.国内外静电喷雾施药技术及机具研究[J].农业机械,2008(8):53-54.
[22] 刘金龙,丁为民,邓巍.果园对靶喷雾红外探测系统的设计与试验[J].江苏农业科学,2012,40(12): 370-372.
[23] 李丽,李恒,何雄奎.红外靶标自动探测器的研制及试验[J].农业工程学报,2012,28(12):159-162.
[24] 裴文超,陈树人,尹东富.基于DSP和单片机的实时对靶喷施除草系统[J].农机化研究,2012,34(1): 149-153.
[25] 张俊雄,马锃宏,李伟,等.基于土壤基质的播种精度检测试验研究[J].农业机械学报,2012,43(12):62-66.
Design and Simulation of Cleaning Device in Peanut Harvester Based on ADAMS
Zhang Li1, Guo Qiaohui2, Xu Jia1
(1.Wuhan Qingchuan University,Wuhan 430064,China;2 Jinshan college of Fujian Agriculture And Forestry University, Fuzhou 350001,China)
As the most important one of the items, peanut cleaning and separation is peanut harvester operation process that the core part of the harvester,whose performance is directly related to the work quality of the harvester. And its main target is the impurity rate and loss of broken rate. In order to improve peanut cleaning device for separating the design efficiency and shorten the design cycle, it presents a peanut harvester based on ADAMS cleaning apparatus virtual design and simulation methods, and focus on the design of key parts, including wheel and the star wheel. By using the non free particle coordinate system and the generalized coordinate system, the differential equation of the mechanical system of the cleaning device is established based on the position and velocity constraints of Lagrange equation.By using ADAMS software under the condition of different speed of shaft work effect were dynamics simulation, it describes three different speeds of Y axis velocity curve.By comparing the curve of the vibration effect, it selected the appropriate shaft speed. And the peanut harvesting machine optimal design has important significance.
peanut harvester; cleaning device; virtual simulation; ADAMS
2016-01-26
湖北省自然科学基金项目(2014CFB322)
张 莉(1978-),女,武汉人,讲师,硕士。
郭巧惠(1981-),女,福建霞浦人,讲师,硕士,(E-mail)gqh0591@163.com。
S225.7+3
A
1003-188X(2017)03-0053-05
