基于二维激光传感器无人直升机作业边界探测
2017-12-16陈加栋邱白晶管贤平周海涯
陈加栋, 邱白晶, 管贤平,周海涯
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
基于二维激光传感器无人直升机作业边界探测
陈加栋, 邱白晶, 管贤平,周海涯
(江苏大学 现代农业装备与技术教育部重点实验室,江苏 镇江 212013)
无人机喷雾作业边界探测识别是无人直升机喷雾的重要内容,如果喷雾最大喷幅超过目标区域,会导致药液流失,造成环境的严重污染。为此,基于无人直升机平台,选取二维激光扫描传感器、姿态传感器等传感器搭建了一套二维激光扫描探测系统。该系统利用二维激光传感器探测无人直升机距离作物冠层和田埂的高度,计算冠层和田埂距离差值,并把高度差值作为分割阈值,实现无人直升机作业边界的提取,同时进行了田间试验验证。
无人直升机;二维激光扫描;边界探测;田间试验
0 引言
无人直升机相比于其它植保机械,适用于小区域、大田内精准施药和丘陵及山区的农作物病虫害防治,而且尺寸小、质量轻,不需要专用起降场地与跑道,是一种非常适合我国农作物病虫害防治的施药机械[1-3]。
无人机与LIDAR结合,在地形测绘、环境监测及三维城市建模等领域有广泛的发展[4]。2000年,Elberink 等[5]将离散点云数据内插为规则格网,通过各点与邻近点的高程值来分析各点的高程纹理特征,利用非监督分类的方法分割不同的地物点。2003年,Krzystek[6]利用局部最低点构建TIN模型,以高差临界值判别地面及地物点,再利用有限元法调整地面模型并加密地面点。这种使用离散点或不规则三角网的方法有较高精度的成果,避免了内插格网带来的误差;但计算的难度较高,花费的时间也较多。2004年,Wijesoma W S[7]提出了一种利用激光测距仪结合Kalman 滤波进行道路的提取与跟踪的算法;但算法计算过程复杂,其实际应用受到限制。2006年,Cremean L B[8]提出了基于神经网络的方法进行道路的分割与跟踪。此方法首先提取道路的高度、色彩和纹理等特征信息训练神经网络,然后进行道路的检测。2008年,于春和[9]提出了一种道路边界检测算法,算法依据激光获得的高度差,对边界深度数据的进行提取。试验结果表明:该算法可靠性强,能够准确完成道路边界检测任务。2011年,刘梓等[10]利用3D激光雷达检测道路高度跳变特性来提取特征,该算法能够准确完成道路边界检测任务。2011年,侯学勇[11]提出了全局搜索及双阈值的算法对数据点进行归类并检测道路边界。实验结果表明:该算法能够检测出路边及障碍物边界,能够为自主移动机器人提供安全可行的区域。
由于小型无人直升机作业时载重限制,进行低空作业时使用二维激光传感器替代LIDAR系统,不仅能够达到测绘目标,而且降低了系统的花销,对无人机操作者更安全[12]。
本文在前人研究的基础上,针对小型无人直升机平台,选取二维激光扫描探测系统,利用无人直升机低空、低速作业条件下机载二维激光扫描数据高程差作为分割依据,提出作业边界分割算法,并对算法进行了验证。
1 探测系统组成
1.1 农用遥控无人直升机平台
平台采用汉和CD-15型超低空飞行植保无人直升机,起飞质量35kg,飞行高度1~30m,可以超低空、低空、中高空飞行,飞行速度为0~8m/s。
1.2 二维激光扫描传感器
如图1所示:二维激光扫描传感器采用HOKUYO公司的UTM-30LX-EW 2D激光扫描测距传感器。激光由波长905nm的半导体激光二极管产生,激光安全等级1级。传感器外形如图1所示,具体参数如表1所示。
传感器体积小,长宽高为 62mm×62mm×87.5mm,质量仅210g。
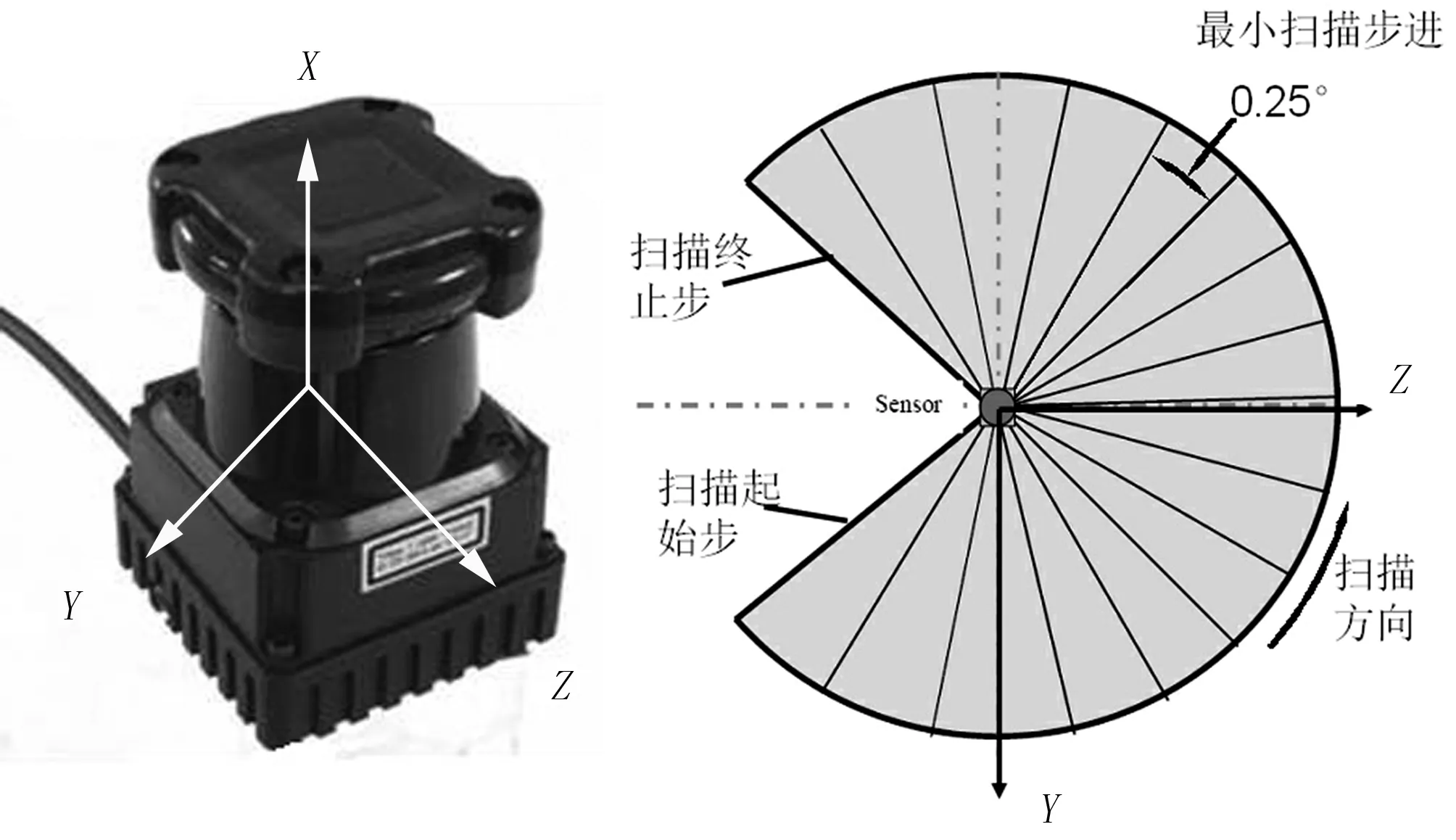
(a) 传感器外形图 (b) 扫描仪参数图
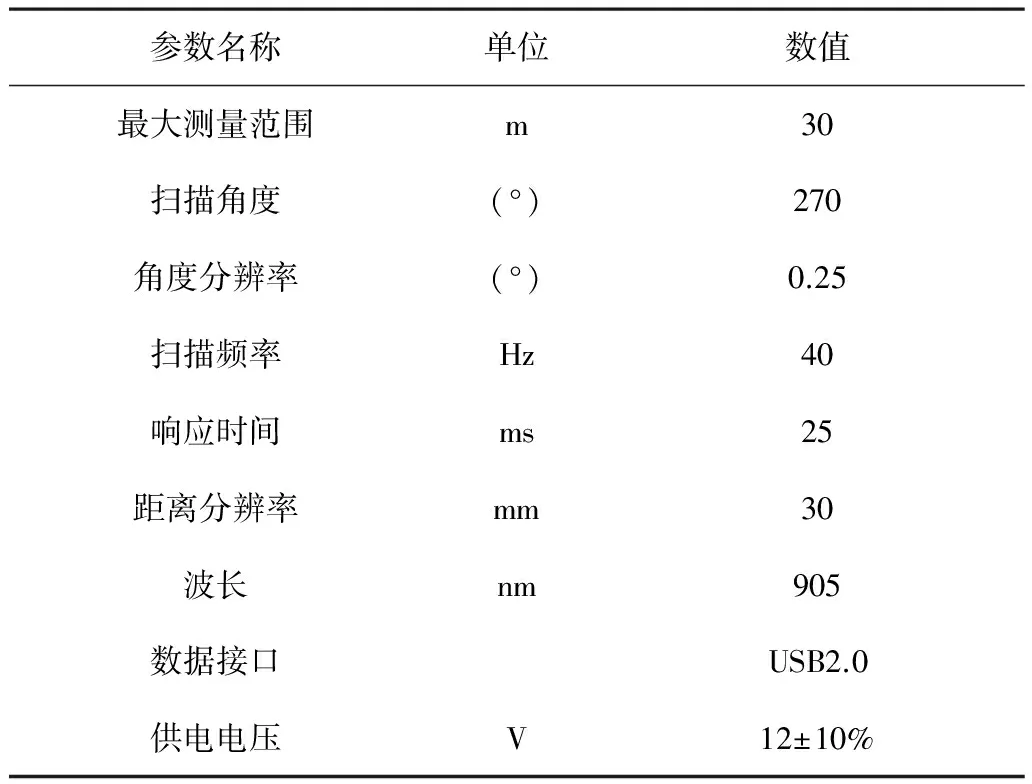
参数名称单位数值最大测量范围m30扫描角度(°)270角度分辨率(°)0.25扫描频率Hz40响应时间ms25距离分辨率mm30波长nm905数据接口USB2.0供电电压V12±10%
1.3 姿态传感器
为了获取无人机飞行姿态,采用XSENS MTi-30 AHRS姿态传感器,静态翻滚/俯仰角精度为0.2°,动态翻滚/俯仰角精度为0.5°,偏航角精度为1.0°,外形尺寸57mm×42mm×23mm,质量52g。
2 探测系统安装及坐标系转换
2.1 探测系统安装
探测系统安装位置如图2所示。将二维激光距离传感器安装在无人直升机左右对称面上且在喷雾系统之前,保证二维激光距离传感器的激光扫描平面与无人直升机前进方向垂直,且对应1/2扫描平面的一根扫描线垂直于地面向下;姿态传感器安装在二维激光距离传感器测量的范围外。在二维激光距离传感器和姿态传感器与无人直升机机身固定处加装吸振缓冲装置且二维激光距离传感器和姿态传感器安装完成后,保证整个系统的重心在无人直升机左右对称面上。

1.喷头 2.喷杆 3.激光扫描测距传感器 4.姿态传感器
2.2 坐标系转换
测量姿态传感器的安装位置与二维激光距离传感器安装位置的距离及转角信息,利用转换矩阵[13]对二维激光信号进行校正,将激光信号、姿态信号转换到以激光发射点为原点、无人直升机前进方向为X轴、Z轴垂直向下,XYZ组成右手直角坐标的无人直升机坐标系下。
3 激光传感器系统的标定
激光测距仪受到光照、温度和被测物体表面反射性能的影响,测距存在误差。为了尽可能符合实际情况,在白天正常光照、常温环境下,以地面作为激光的照射点,分别在距离该照射点0.5~3.5m的范围内,以0.5m为步长选取测量点,每个测量点测量3次求平均值。由于实际操作中激光发射点距离地面的尺寸H测量比较困难,而激光发射点距离安装位置的尺寸a为固定值,b、H、a存在关系:b=H+a。所以,试验时通过控制尺寸b来实现对尺寸H的控制。得到测距数据如表2所示,系统标定示意图如图3所示。

表2 标定结果
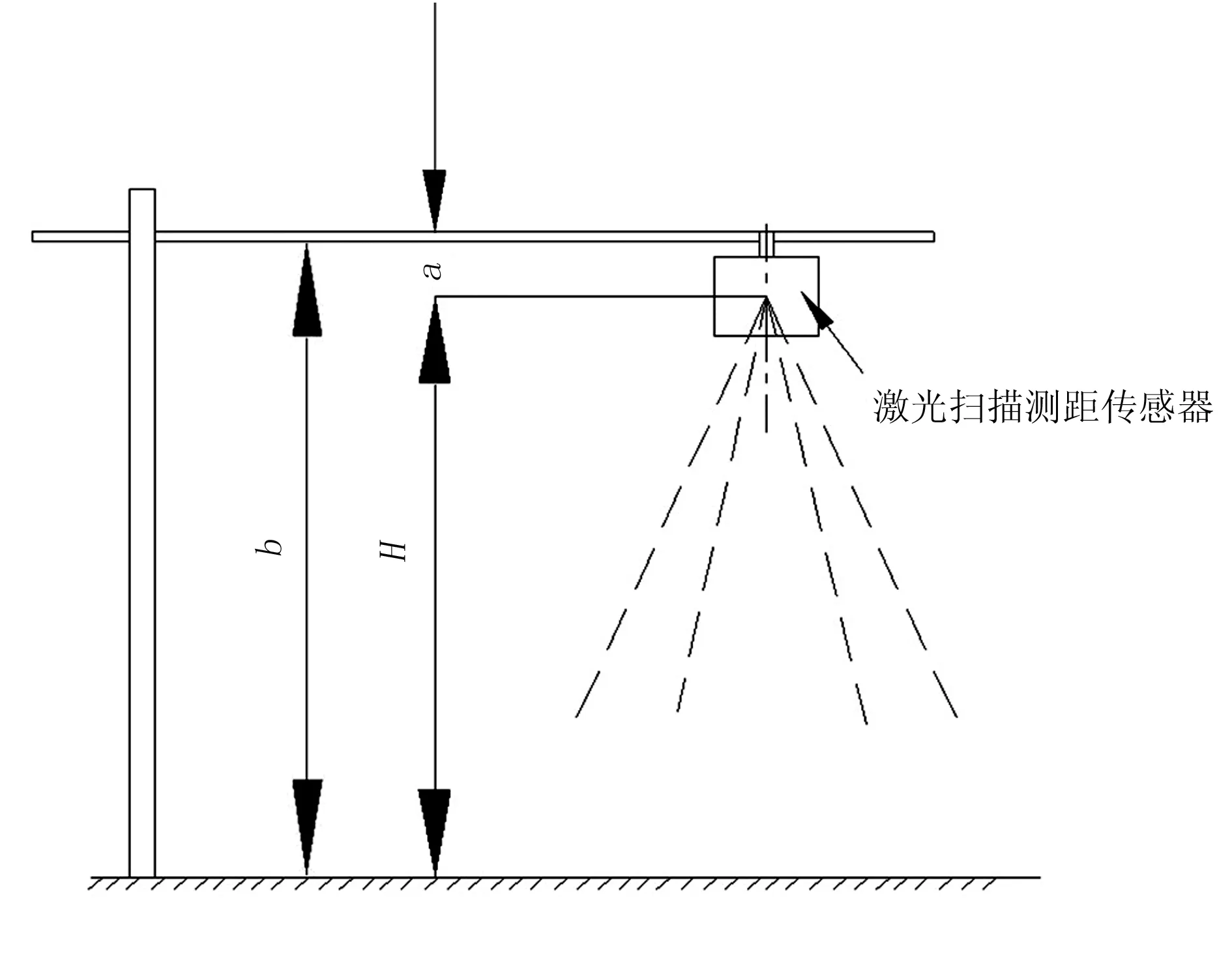
图3 系统标定示意图
用最小二乘法对数据进行曲线拟合,得到拟合函数表达式为f(x)=0.997 4x-0.003;拟合相关系数R2=1。拟合结果如图4所示。
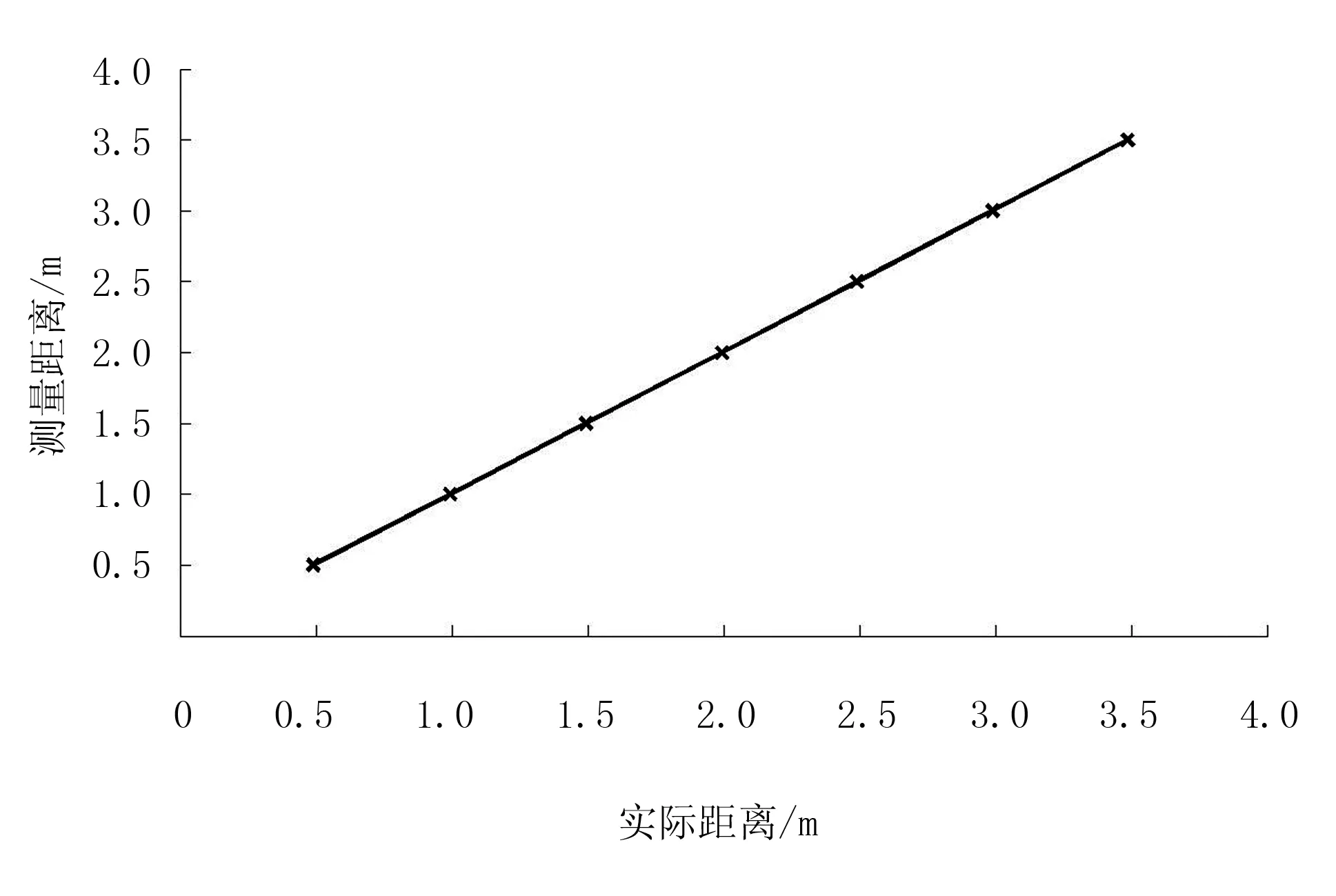
图4 拟合结果
4 算法描述及算法流程图
直立水稻和田埂存在高度差,可以利用二维激光传感器获得的高度差值作为分割阈值,将激光信号进行分割,从而实现作业边界的探测。
4.1 扫描角度及滤波中值的确定

对数据进行坐标系转换。考虑飞机飞行过程中的振动对测量的影响,对数据进行中值滤波处理,滤波中值选6~10,获得一帧激光信号值L(i)。
4.2 阈值提取
对所获取的激光距离信号进行阈值提取,阈值提取算法如下:
1) 根据水稻和田埂的高度特征,分别提取不同飞行速度、不同飞行高度下水稻和田埂的特征差值范围及水稻田埂间的特征差值。由于激光扫描频率为40Hz,获取的数据量较大,所以数据处理时需要对激光采集是数据进行提取,提取的数据应能够反映探测对象的特征。具体提取方法如下:当飞机以0.5m/s速度飞行时,每隔0.5s提取一帧激光数据;以1.5m/s速度飞行时,每隔0.2s提取一帧激光数据;以2.5m/s速度飞行时,以0.1s提取一帧激光数据。
2) 将不同飞行高度H及不同飞行速度V下对应水稻和田埂间的特征差值进行拟合,得到拟合函数f(H,V)。
3)根据结合拟合结果f(H,V),根据公式T=f(H,V)确定边界提取阈值T的大小。
4) 最终确定阈值T。

图5 扫描角度计算
4.3 边界分割
无人直升机作业边界提取,具体边界分割算法如下:
1)对L(i)逐一判断第i个点和第i+1个点的特征差值h(j)。
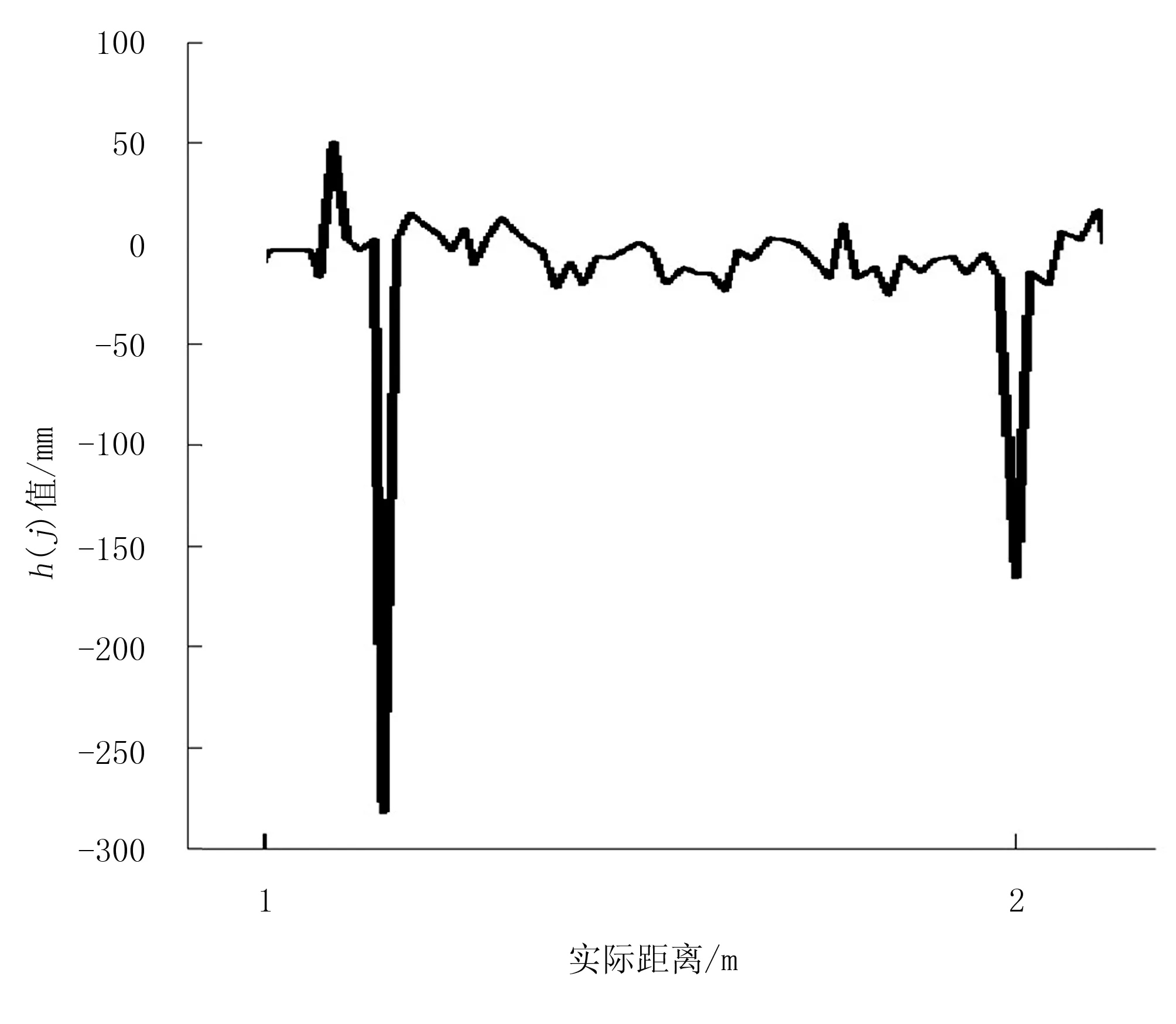
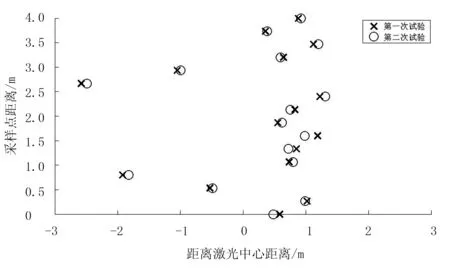
2)判断h(j)与阈值T的大小:当h(j)≥T,记录此点的值以及所对应的角度。当h(j) 3)以h(j)为分割点,将激光信号L(i)分割为不同的区间,从而依据所分割的区间及区间所对应的地貌情况结合扫描角度对应的实际距离,保证最大喷幅在区间内,从而确定作业区域。 4.4 算法流程图 对一帧激光数据进行边界识别算法的具体流程图如图6所示。 图6 数据处理流程图 为了验证算法的可行性及算法的精度,对无人直升机田间试验的水稻和田埂数据进行了算法的验证。 试验选取飞行速度0.5m/s、飞行高度为3m、飞行距离为4m时的一段时间内激光数据进行处理。 飞行过程中由激光记录水稻及田埂的距离信息。姿态传感器记录无人直升机飞行的姿态角度。运用上一节提到的算法,利用飞行姿态数据对激光数据进行校正。田间试验如图7所示。 图7 田间试验图 根据无人直升机田间试验结果,分别提取不同速度、不同高度下水稻及田埂的高度特征阈值,并计算水稻和田埂的特征差值,对所得数据进行拟合。拟合函数为 f(H,V)=174.2-11.2H+62.9V+28.03H2+ 4.735HV-6.475V2 拟合相关系数为R2= 0.8514。 由试验参数:飞行速度0.5m/s,飞行高度为3m,计算水稻和田埂的高度特征差阈值T=129.8mm。对L(i)逐一判断第i个点和第i+1个点的高度差值h(j),判断h(j)与阈值T的大小。 若h(j)≥T,记录此点的值以及所对应的角度;若h(j) 以h(j)为分割点,将激光信号L(i)分割为不同的区间。以扫描角度对应实际距离为X轴,h(j)为Y轴绘图,h(j)信号如图8(a)所示,局部放大图如图8(b)所示。 (b) 局部放大图 由图8可知:高度差值h(j)最大出现在距离激光发射原点1.1m处,以此处为激光信号的分割点,可以将信号分割为水稻和田埂。 根据以上边界识别算法,对4m长采样区间内的两次激光数据进行处理,结果如图9所示。 由图9知:信号分割点出现在距离激光中心右侧1m附近,数据的方差为0.27m,与实际田间测量结果略有偏差。对两次试验的激光信号进行分割的过程中,在激光发射原点的左边存在许多误判点,这是由于田间作物随机因素造成的,造成分割算法出现错误。 图9 算法分割结果 1)基于无人直升机平台搭建了二维激光扫描系统。该系统通过激光测距仪和陀螺仪获取无人直升机距离作物冠层信号和无人直升机姿态信号,并对激光进行了标定,拟合函数为f(x)=0.997 4x-0.003,拟合相关系数R2=1。 2)针对无人直升机作业边界,提出了利用激光信号高度差作为分割阈值,可实现作业边界的提取。 3)田间试验表明:信号分割点出现在1m附近,方差0.27m。在分割的过程中,由于田间作物随机因素使激光发射原点的左边存在许多误判点,造成分割算法出现错误。 [1] 茹煜, 周宏平. 航空静电喷雾技术研究综述[J].云南农 业大学学报,2006,21(5):29-32. [2] S Edward Law.Agricultural electrostatic spray application: a review of significant research and development during the 20th century[J].Journal of Electrostatics,2001,25(42):51-52. [3] Kirk I W, Hoffmann W C, Carlton J B. Aerial electrostatic spray system performance[J].Transactions of the ASAE,2001,44(5): 1089-1092. [4] 侯峰.LIDAR详细介绍及其应用举例综述[J].科技广场,2014(4):95-100. [5] Elberink S O,Mass H.G. The use of anisotropic height texture measures for the segmentation of airborne laser scanner data[C]// IAPRS,vol.33, part B3, Amsterdam, 2000:678-684. [6] Krzystek P.Filtering of Laser Scanning Data in Forest Areas Using Finite Elements[C]//Workshop: 3-D reconstruction from airborne laser scanner and InSAR data, 2003. [7] Wijesoma W S, Kodagoda K R S, Balasuriya A P.Roadboundary detection and tracking using ladar sensing[J].IEEE Transactions on Robotics and Automation, 2004, 20(3):456-464. [8] Cremean L B,Murray R M. Model-based estimation of off-highway road geometry using single-axis ladar and inertial sensing[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Pasadena, TX, USA,2006: 1661-1666. [9] 于春和.基于激光雷达的道路边界检测[J].电子器件, 2008, 31(3):756-762. [10] 刘梓, 唐振民, 任明武.基于3D激光雷达的实时道路边界检测算法[J].华中科技大学学报:自然科学版,2011, 39(2):351-354. [11] 侯学勇,刘士荣.基于二维激光测距仪的道路可行区域提取[J].东南大学学报:自然科学版,2011, 41(S1):88-41. [12] David Anthony, Sebastian Elbaum.On Crop Height Estimation with UAVs Intelligent Robots and Systems (IROS 2014) [C]//2014 IEEE/RSJ International Conference on. IEEE, 2014: 4805-4812. [13] 辛麒.基于机载激光雷达数据构建DEM的精度分析[D].西安:长安大学,2009. Detection of Boundary of Unmanned Helicopter Based on 2D Laser Sensor Chen Jiadong, Qiu Baijing, Guan Xianping, Zhou Haiya (Key Laboratory of Modern Agricultural Equipment and Technology, Ministry of Education, Jiangsu University,Zhenjiang 212013, China) The detection and recognition of the boundary of the UAV spray operation is an important part of the spraying of the unmanned helicopter. If the maximum spray range exceeds the target area, it will lead to the loss of the liquid medicine,which will lead to the serious pollution of the environment. In this paper, based on the platform of unmanned helicopter, the 2D laser scanning sensor, gyroscope and other sensors are selected to build a set of laser scanning detection system. The system using a 2D laser sensor detection the crop canopy and the ridge height. The canopy and ridge distance difference is calculated. The height difference is used as the segmentation threshold to realize the extraction of the boundary of the unmanned helicopter operation. Field experiment was carried out to detect the boundary detection algorithm. unmanned helicopter;2D laser scanning;boundary detection;field experiment 2016-05-25 江苏省科技支撑(农业部分)计划项目(BE2014374);镇江市重点研发计划项目(NY2015016);低空低量航空植保关键技术及装备研发项目(NZXT01201403) 陈加栋(1989-),男,江苏镇江人,硕士研究生,(E-mail) cjdong2007@126.com。 邱白晶(1961-),男,江苏镇江人,教授,博士,(E-mail)qbj@ujs.edu.cn。 S251;S494 A 1003-188X(2017)07-0010-06
5 算法验证与数据处理

6 算法验证结果分析
7 结论
