基于DSP图像处理和HPI通信接口的采摘机器人设计
2017-12-16伍坪
伍 坪
(三明学院,福建 三明 365004)
基于DSP图像处理和HPI通信接口的采摘机器人设计
伍 坪
(三明学院,福建 三明 365004)
为了提高采摘机器人的智能化程度,降低设计和制造成本,提高机器人的通信能力,提出了一种基于HPI接口和DSP系统的新型采摘机器人。该机器人将嵌入式DSP系统和ARM控制器利用HPI接口有效地结合起来,利用图像DSP系统对采集图像进行处理,实现目标的定位,从而提高了嵌入式系统的运算能力;利用ARM控制器对执行末端进行控制,实现了机械臂的准确定位和控制;使用滤波器对通信过程的干扰信号进行降噪处理,从而提高了整个系统的稳定性和可靠性。最后,对采摘机器人的通信能力进行了测试,结果表明:IIR滤波器可以有效的滤除干扰信号,通信较为稳定,从而验证了嵌入式DSP系统和HPI通信接口在采摘机器人设计上使用的可行性。
采摘机器人;DSP图像处理;HPI接口;ARM控制器;嵌入式系统
0 引言
近年来,随着机器人在农业作业过程中的普及,欧美和日本等国家一直致力于基于视觉通信系统的采摘机器人研究,我国在相关领域也展开了研究。采用嵌入式系统代替PC控制系统是农业机器人发展的方向,嵌入式系统功耗低、结构简单、成本低、稳定性较好,是传统PC系统在农业机器人上所不能代替的,而借助图像DSP系统可以有效地提高嵌入式系统的运算能力,从而提高系统的实时性。利用ARM控制器可以植入LINUX操作系统,进而对机器人的执行末端进行操作,DSP和ARM之间的通信采用HPI通信接口,从而提高了整个系统的运算速度和通信能力,对于农业机器人的研究具有重要的现实意义。
1 DSP图像处理系统设计
DSP图像处理平台主要是对数字信号进行处理,需要将采摘机器人摄像机得到的模拟图像转换为数字图像信号。该过程主要通过A/D信号变换器来实现,而DSP处理系统则通过FFT变换和卷积等形式对信号进行处理,典型DSP系统设计的主要流程如图1所示。为了使DSP和ARM之间进行快速的通信和数据交换,采用了16bit的HPI接口,且在TMS320DM642芯片集成了该接口。该接口还可以用来进行PCI通信,DSP图像处理系统的工作流程如图2所示。
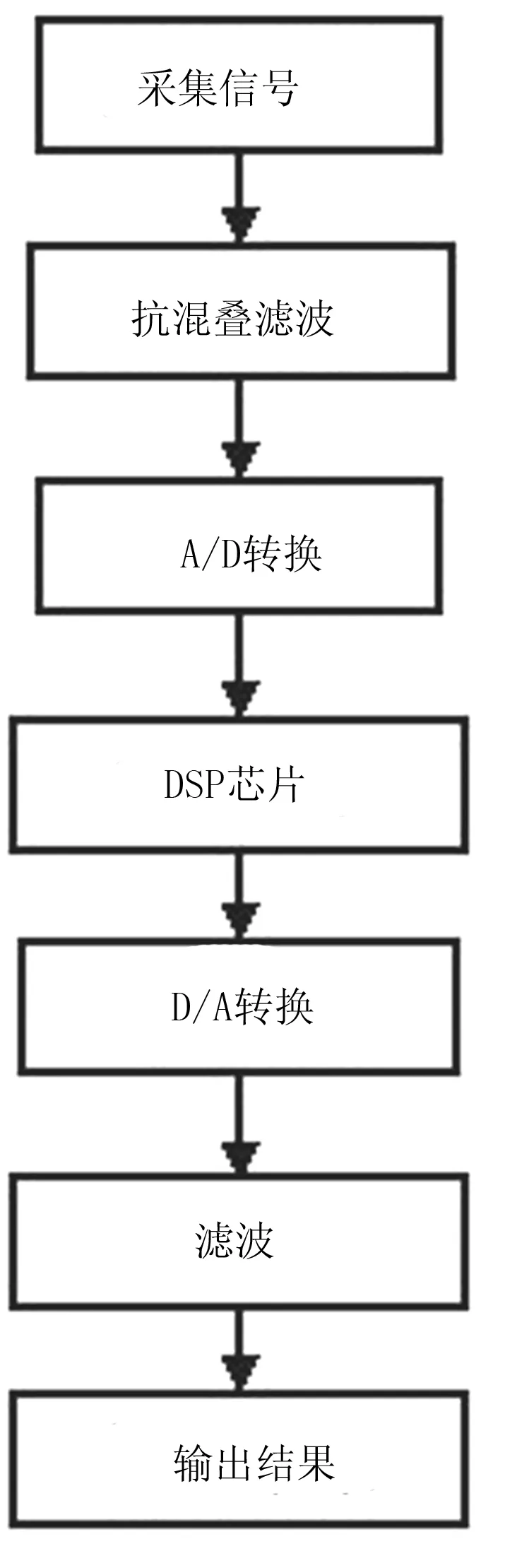
图1 机器人DSP系统设计流程
具体步骤:首先是利用摄像头采集当前图像帧,然后将图像利用SCOM模块传递给图像处理模块,如果识别算法检测到目标,则发送指令给移动式采摘机器人;移动机器人接受到指令后进行相关的移动,达到目标物一定距离后,计算执行末端和目标物的距离,然后将得到的距离信号利用HPI接口传递给ARM控制系统。
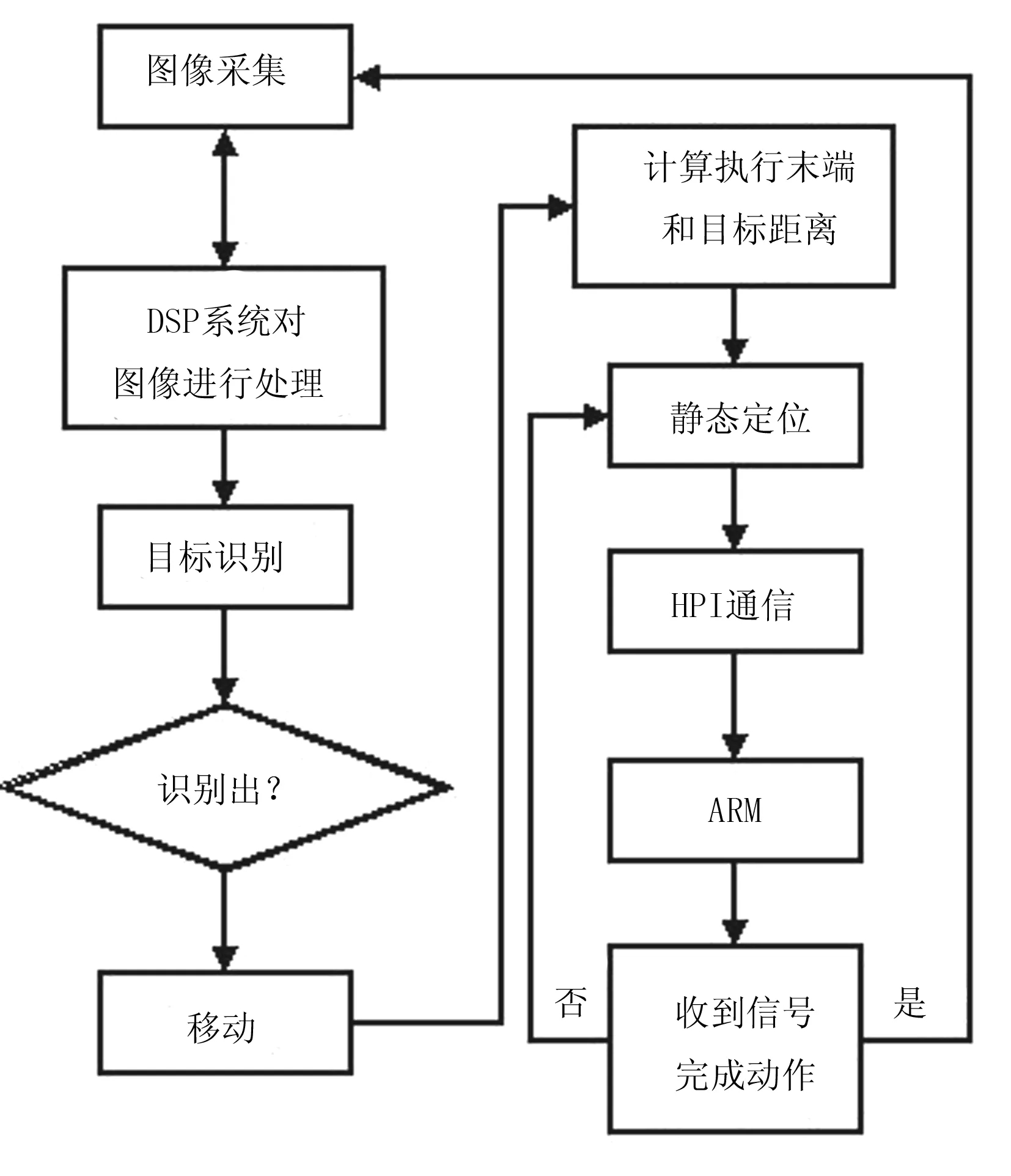
图2 DSP图像处理系统流程
2 采摘机器人DSP图像通信信号滤波算法
为了提高采摘机器人DSP图像通信信号的质量,降低信号噪声的干扰,采用IIR数字滤波器对信号进行滤波。该滤波器是一种基于离散时间的系统,其系统函数为
(1)
其中,ak和bk表示滤波系数;z表示响应函数。该函数看成是IIR滤波器的子系统和(M-N)个FIR滤波器系统的级联形式,对于滤波器的设计主要通过对滤波器系数的求解;在数值计算方面可以看成是函数逼近问题,利用最小均方差方法对系统的特性逼近,根据逼近平面的不同可以将滤波器分为数字滤波器和模拟滤波器,这种平面分别为S平面和Z平面,得到的滤波器分别为模拟滤波器和数字滤波器。数字滤波器的设计主要依据模拟滤波器的设计原理,应用数字滤波器的特性模仿模拟滤波器。其中,脉冲响应不变法是最常用的方法之一,利用单位脉冲序列h(n)来模拟滤波器的冲击响应ha(t),利用模拟滤波器时间采样,得到脉冲响应序列h(n),近似地满足h(n)=ha(nT)。其中,T表示采样的周期。假设ha(t)是ha(S)的拉普拉斯变换,h(n)是H(z)的Z变换,则根据模拟信号的拉普拉斯变换和采样信号序列的Z变换可以得到关系式为
(2)
由式(2)可以看出:脉冲响应不变法可以利用数字滤波器的Z平面来代替模拟滤波器的S平面,从S平面到Z平面的变换需要借助公式z=esT。该公式是标准变换公式,其映射关系如图3所示。

图3 脉冲响应不变法的映射关系图
根据拉普拉斯变换和采样信号序列的变换关系,模拟滤波器和数字滤波器的频率响应关系为
(3)
由以上公式可以看出:数字滤波器和模拟滤波器的差别在于前者是后者在周期上的拓展。因此,根据采样定理,模拟滤波器的频率响应需要为有限带,即
(4)
只有这样,才能保证在不产生混叠失真的情况下,利用数字滤波器的频率响应模拟滤波器的频率响应,其关系式为
(5)
一般模拟滤波器很难严格限带,在折叠频率以上模拟滤波器频率响应越大、越快,其变换后的失真越小,滤波器的效果才会越好。混叠的失真现象如图4所示。
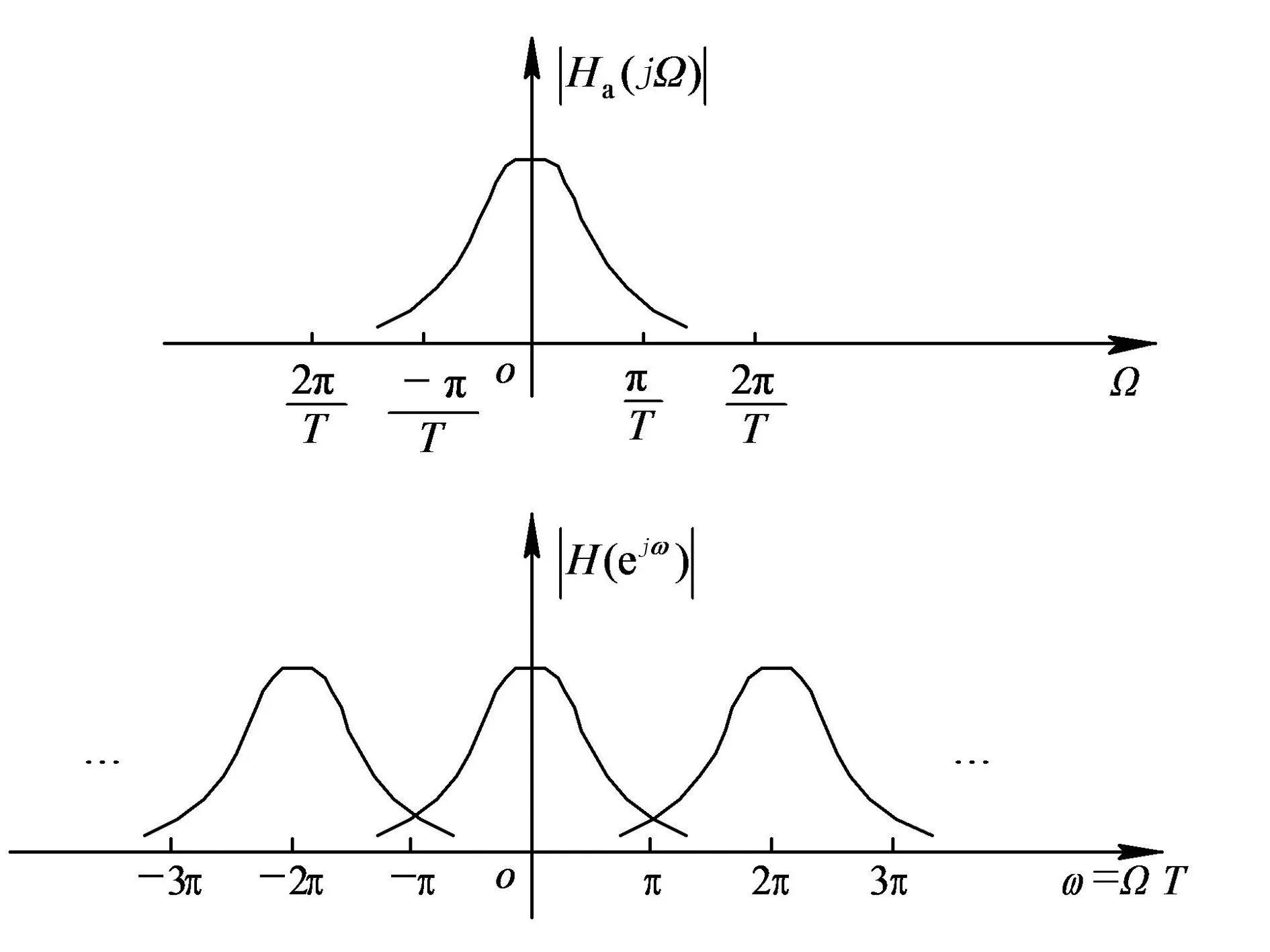
图4 频率响应混叠现象示意图
由图4可以看出:将采样的时间间隔降低,频率响应的周期延拓才能差距更大,从而降低混叠效应。IIR数字滤波器采用两种方法进行设计:一种方法是通过模拟滤波器的设计公式来进行计算;另一种是直接在频率和时域内联立方程,但进行设计时需要借助计算机辅助计算。
IIR数字滤波器的设计一般有两种方法:一是借助模拟滤波器的设计方法进行。其设计步骤为:先设计模拟滤波器,再按照某种方法转换成数字滤波器。这种方法比较容易一些,因为模拟滤波器的设计方法已经非常成熟,不仅有完整的设计公式,还有完善的图表供查阅。二是直接在频率或者时域内进行,由于需要解联立方程,设计时需要计算机做辅助设计。其过程是:首先通过计算得到模拟滤波器响应函数Ha(s),然后利用某种转换方法将Ha(s)转换为数字滤波器的响应H(z),具体流程如图5所示。
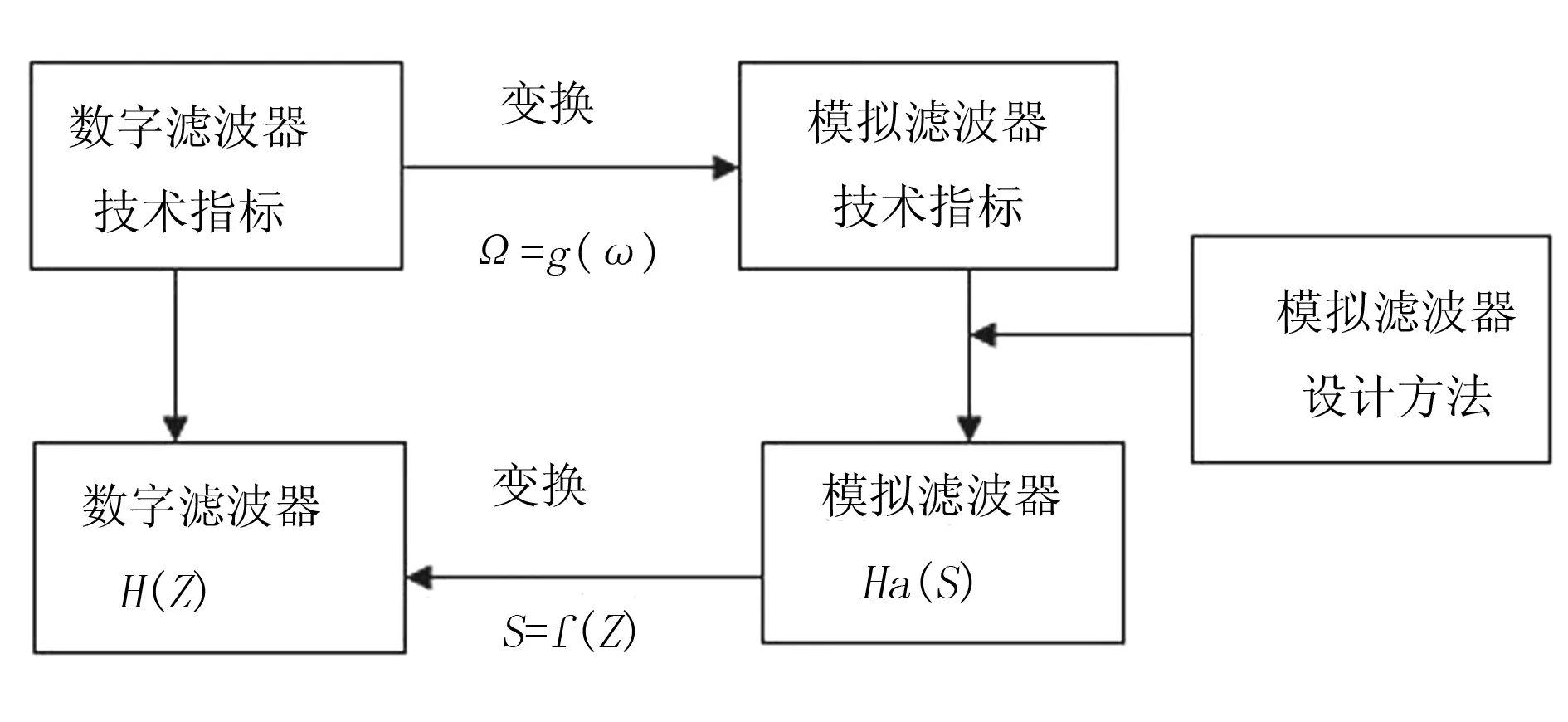
图5 数字滤波器设计流程
数字滤波器当前使用的最成熟的方法是两种:一是脉冲响应不变法;二是双线性变换法。根据设计流程,其设计步骤如下:
1)首先确定需要设计数字滤波器的技术指标,包括带通边界ωp及最大允许的衰减αp、阻带边界ωs、阻带允许的最小衰减αs;
2)通过数字滤波器的技术指标来核算模拟滤波器的技术指标;
3)利用模拟滤波器的计算公式,按照指标对模拟滤波器进行设计;
4)根据转换公式,把模拟滤波器Ha(s)变换成数字滤波器响应函数H(z)。
根据滤波器的设计步骤,对DSP系统进行滤波器设计后,便可以将其应用在采摘移动式机器人设备上,来对其进行试验,从而验证HPI通信的可行性。
3 采摘机器人通信性能试验
在复杂的作业环境下,采摘机器人的通信性能十分重要。本研究采用HPI通信接口对DSP处理图像进行传输,利用该原理设计了采摘移动式机器人的模型,其实物如图6所示。
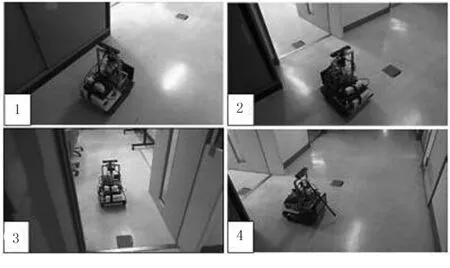
图6 采摘移动式机器人实物和实验场景图
为了对采摘机器人的通信能力进行测试,以基于DSP图像处理和目标识别的自主导航为试验目标,通过多个方向的移动,来测试通信的准确性,移动过程如图7所示。
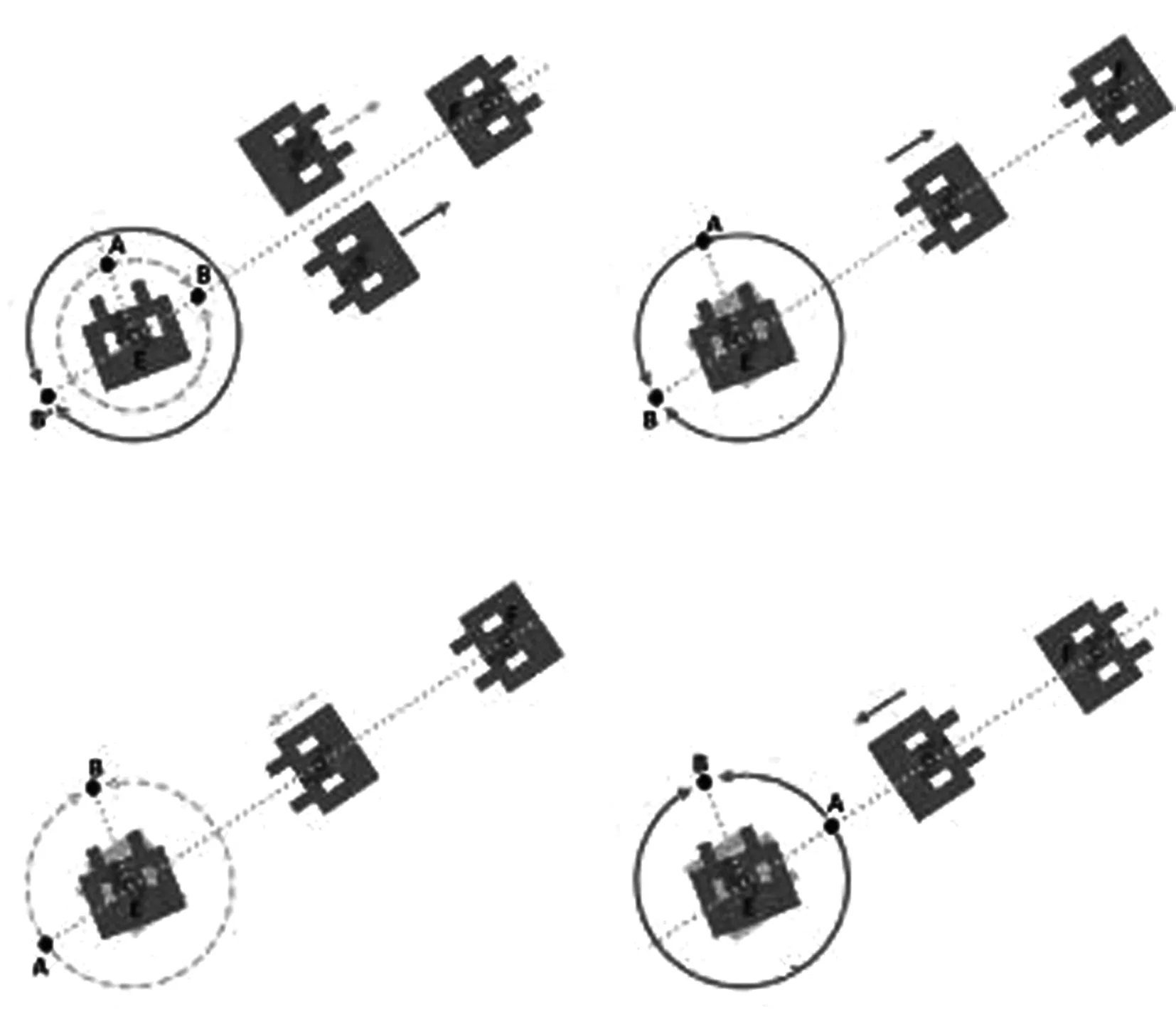
图7 实验过程示意图
图7中,分为直行左转和逆行、直行右转和逆行。为了测试通信过程,将试验分为正常通信和加入噪声干扰的通信,通信方式采用HPI通信接口,通过测试得到的原始信号波形如图8所示。

图8 原始信号波形
由测试结果可以看出:在0~18 000Hz的范围内,原始波形的最大频率响应幅值为0.18dB,对原始信号加入噪声信号后进行测试,得到了如图9所示的信号波形。
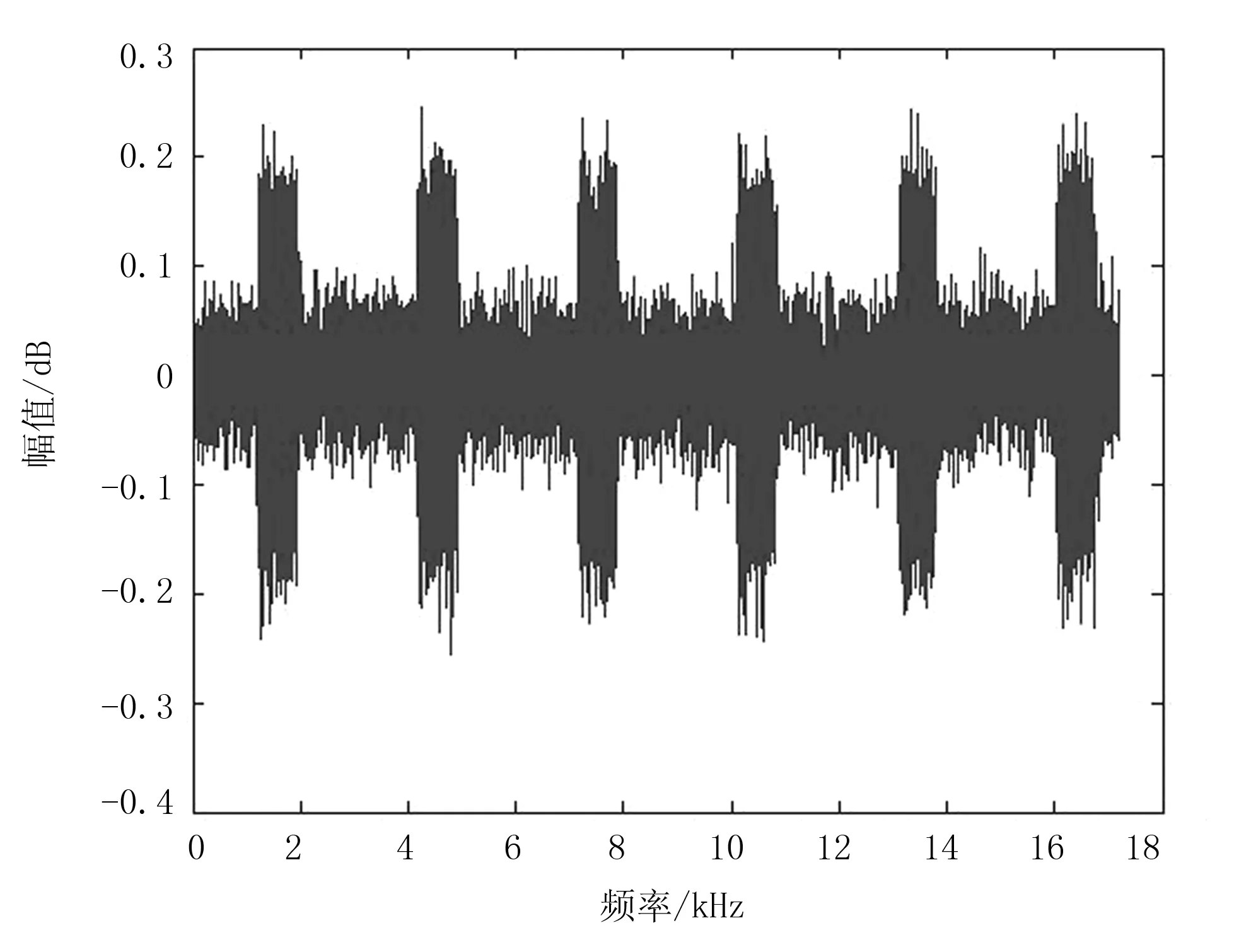
图9 含噪声波形
由图9可以看出:干扰信号的最大幅值为0.1dB。该信号会对DSP的通信传输造成干扰,因此需要对信号进行滤波,滤波后的信号如图10所示。

图10 DSP系统滤波后波形
由图10可以看出:对信号进行滤波后,可以有效地消除干扰信号,从而保证通信的稳定性和可靠性,同时也验证了DSP图像处理系统和HPI通信接口的可行性。
4 结论
结合IIR滤波算法,设计了一种基于HPI接口和DSP系统的新型采摘机器人。该机器人综合使用了ARM控制器和DSP嵌入式系统,从而实现了机器人的快速、准确定位,提高了机器人作业的精确性和稳定性。对机器人进行了通信能力实验,测试项目包括直行左转和逆行、直行右转和逆行。为了测试通信过程,并在测试过程中加入了干扰信号。测试结果表明:DSP系统可以有效地对干扰信号进行滤除,得到稳定的通信信号,从而验证了HPI通信接口的高效性和稳定性,为现代化采摘机器人通信设备设计提供了理论依据。
[1] 钱建平,杨信廷,吴晓明,等.自然场景下基于混合颜色空间的成熟期苹果识别方法[J].农业工程学报,2012,28(17):137-142.
[2] 顾宝兴,姬长英,王海青,等.智能移动水果采摘机器人设计与试验[J].农业机械学报,2012,43(6):153- 160.
[3] 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012,43(3):163-167.
[4] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12):165-170.
[5] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68,112.
[6] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报, 2012,43(11):209-213.
[7] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12):165-170.
[8] 袁挺,纪超,陈英,等.基于光谱成像技术的温室黄瓜识别方法[J].农业机械学报,2011,42(S1):172-176.
[9] 熊俊涛,邹湘军,陈丽娟,等.采摘机械手对扰动荔枝的视觉定位[J].农业工程学报,2012,28(14):36-41.
[10] 吕继东,赵德安,姬伟,等.采摘机器人振荡果实动态识别[J].农业机械学报,2012,43(5):173-196.
[11] 王志,艾延廷,沙云东.基于BP神经网络的航空发动机整机振动故障诊断技术研究[J].仪器仪表学报,2007,28(4): 168-171.
[12] 马月红,马彦恒,王雪飞.基于MATLAB的FIR数字滤波器设计与仿真[J].电子测量技术,2010,33(11): 66-69.
[13] 苑光明,丁承君,俞学波.基于鱼眼镜头的全方位视觉系统的设计及实现[J].河北工业大学学报,2010,69(2): 1-3.
[14] 苑光明,丁承君,俞学波.基于鱼眼镜头的全方位视觉系统建模[J].天津工业大学学报, 2010,29(3):47-49.
[15] 黄云开,郑政,杨柳.基于MATLAB的三维超声成像及图像处理[J].仪器仪表学报,2009, 30 (4):840-847.
[16] 程亮,童玲.最大熵原理在测量数据处理中的应用[J].电子测量与仪器学报,2009,23(1):47-51.
[17] 张三军,郭庆.基于MATLAB与DSP的心电整系数数字滤波器设计[J].国外电子测量技术,2009,28(3): 69-72.
[18] 汤一平,叶永杰.智能全方位视觉传感器及其应用研究[J].传感技术学报,2007,20(6):1316-1320.
[19] 张尧,陈卫东.一个基于全景视觉的移动机器人导航系统的设计与实现[J].机器人,2005,27(2):173-177.
[20] 王景川,陈卫东,曹其新.基于全景视觉与里程计的移动机器人自定位方法研究[J].机器人,2005,27(1): 41-45.
[21] 陶会荣,丁承君,王建超,等.嵌入式Windows CE下触摸屏驱动程序开发的关键技术[J].机电产品开发与创新,2007,9 (5):108-109.
[22] 吴剑,杜春翎,徐家恺. Windows CE.NET 驱动开发中的中断处理机制研究[J].微计算机应用,2007,28(7):752-754.
[23] 李寒,王库,曹倩,等.基于机器视觉的番茄多目标提取与匹配[J].农业工程学报,2012,28(5):168-172.
[24] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报,2012,43(12):209-213.
[25] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013,29(10):12-18.
[26] 朱凤武,于丰华,邹丽娜,等.农业机器人研究现状及发展趋势[J].农业工程,2013,3(6):10-13.
Design of Picking Robot Based on DSP Image Processing and HPI Communication Interface
Wu Ping
(Sanming University, Sanming 365004, China)
In order to improve the level of intelligent robot, reduce design and manufacturing costs, improve the communication ability of the robot, it proposes a new harvesting robot system based on HPI interface and DSP. The robot will be embedded DSP system and arm controller by using HPI interface effectively combined and image processing system based on DSP for image acquisition and processing. It achieves the goal orientation, so as to improve the operational capability of the embedded system. As to the end effect or control, to achieve accurate positioning and control of manipulator based on ARM controller, it uses the filter to the communication process interference signal de noise processing, so as to improve the stability and reliability of the whole system. Finally, the picking robot communication ability was tested. According to the test result, IIR filter can effectively filter out the interference signal to be a more stable communication, thus validating the embedded system and DSP HPI in picking robot design was used on the feasibility.
picking robot; DSP image processing; HPI interface; ARM controller; embedded system
2016-07-06
福建省高等学校教学改革研究项目(JAS14763)
伍 坪(1983-),女,福建三明人,讲师,硕士,(E-mail)wuping2016@126.com。
TP242;S126
A
1003-188X(2017)10-0228-05
