牵引式圆草捆捡拾车的设计与试验研究
2017-12-16杨志超刘丽娟
杨志超,张 云,刘丽娟
(1.内蒙古农业大学 机电工程学院,呼和浩特 010018;2.呼伦贝尔市蒙拓农牧科技股份有限公司,内蒙古 呼伦贝尔 021000)
牵引式圆草捆捡拾车的设计与试验研究
杨志超1,张 云1,刘丽娟2
(1.内蒙古农业大学 机电工程学院,呼和浩特 010018;2.呼伦贝尔市蒙拓农牧科技股份有限公司,内蒙古 呼伦贝尔 021000)
为解决大型圆草捆短距离运输难的问题,设计了一种圆草捆捡拾车。该车采用液压系统来控制捡拾机构、运草和卸草机构的动作,运用三维软件Pro/E进行建模与仿真,并对牵引架进行有限元分析,样机出厂后对其进行大量装卸试验。结果显示:整机设计结构简单,捡拾车强度完全符合使用要求,样机捡拾、卸草动作灵活。经实地试验,该车捡成功装卸率98%。
圆草捆捡拾车;牵引式;仿真
0 引言
草是牧业之本,牧草是牲畜的“粮食”,“无草则无畜,无畜则无业”[1]。牧草产业作为草原生态畜牧业的基础,越来越受到重视。随着畜牧业的现代化、集约化、智能化的发展,畜牧机械使用率也越来越高,需求也越来越明显,而牧草收割、盘搂、捆装等机械化将大大促进牧草产业的发展。自2013年以来,国内牧草机械迎来了良好的发展机遇[2],目前从打草到捆草已基本实现机械化,大大节约了时间和人力;但是草捆在压实、打捆之后打捆机只能将草捆放在原地,在草捆的短距离运输过程中一般采用人工或叉车进行草捆装卸,劳动强度高,而叉车也只能一次装卸1~2个草捆,工作效率低,给农牧民带来了不便,且在经济上也有不必要的浪费,增加了牧草收割成本。目前,草捆装载作业工序的机械化作业一直没有得到解决,实现大面积草场草捆的短距离运输迫在眉睫。本文设计的圆草捆草捆捡拾车,是实现草料生产机械化产业链的重要环节。
1 圆草捆捡拾车整体结构与工作过程
1.1 整机结构
牵引式圆草捆捡拾车主要包括主牵引、车架主体、草捆捡拾机构、行走总成、卸载机构、挡草机构、草捆移动机构及液压系统,如图1所示。整机采用型材矩形管等焊合而成,以保证其具有足够的强度。
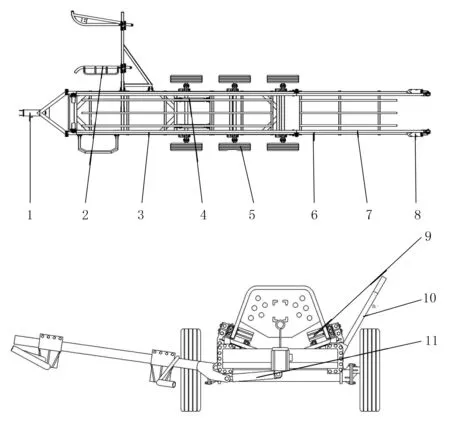
1.主牵引 2.草捆捡拾机构 3.前主架 4.车架提升单作用油缸 5.行走总成 6.草捆移动机构 7.后主架 8.防掉落卸载机构 9.液压马达 10.挡草机构 11.捡拾臂油缸
牵引式圆草捆捡拾车使用47.8kW以上轮式拖拉机牵引作业,无需拖拉机传动轴输出动力,由拖拉机手控制手柄和电子触摸屏,各机构通过液压系统控制可将圆草捆自动捡拾装车; 单排圆草捆自动装卸车可一次性装运圆草捆6~8个,运到目的地后可自动整齐地卸下草捆,一切工作仅需拖拉机手1人完成,节约人力,减少草捆损坏,最大额定载荷8.33t。
1.2 工作过程
牵引式圆草捆捡拾车由拖拉机牵引作业,动作时由拖拉机液压系统提供动力,完成从捡拾到卸载的一系列动作过程,如图2所示。

图2 捡拾车作业图
工作时,先控制液压系统将捡拾车后端卸载机构的挡草板升起,防止因捡拾草捆过多或其它原因而导致圆草捆掉落。拖拉机牵引捡拾车沿圆草捆轴线方向前进,同时拖拉机手控制液压手柄将草捆捡拾叉放到最低位置;拖拉机继续前进,捡拾叉运动到草捆底部,拖拉机手反向拉动拖拉机液压手柄,捡拾臂将圆草捆托起并翻转,圆草捆将自动滚离捡拾臂运动到车架内,另一边的挡草机构可有效挡住圆草捆,防止其滚落捡拾车;焊合机架两个主梁间有140°夹角,可以有效存放圆草捆。将草捆捡拾装车后,拖拉机手控制另一组液压手柄给捡拾车前端的液压马达提供动力,液压马达旋转带动轴端链轮旋转,链轮旋转带动链条移动,链条上的草捆也将向捡拾车后移动;运动一段距离后控制液压马达停止旋转,继续捡拾圆草捆并装车。草捆装满捡拾车后,将捡拾车拉到草捆堆放位置,控制液压系统将捡拾车后端卸载机构的挡草板落下,控制液压手柄将一组车架提升油缸升起,同时控制液压马达旋转,拖拉机缓慢向前移动,整齐地卸下圆草捆。
1.3 捡拾机构的设计
捡拾机构的作用是将圆草捆捡拾并翻运到车架上,其性能的好坏将直接影响到圆草捆的捡拾是否成功。图3 为提升臂的结构图。

图3 提升臂结构图
根据圆草捆的几何尺寸与野外所处环境,设计一种结构简单、操作方便、能满足捡拾功能和效率的圆草捆捡拾装置,提出了精简杆件焊合构架与最佳杆件弯曲、倾斜相结合的提升臂结构设计的理念[3]。
由于圆捆机吐包出的方向是不确定的,捡拾车的前进方向也不可能与草捆轴线方向平行,所以设计的捡拾叉端折弯一定角度,带弧的捡拾叉前端接触到草捆,捡拾车继续前进,捡拾叉将自动摆正捡拾。捡拾叉弯管通过螺栓固定,根据草捆大小可以随意调整捡拾宽度,来适应不同的草捆直径。
1.4 防掉落卸载机构的设计
整车长12m,为防止向车架后端运送圆草捆时因操作失误或其它原因导致草捆意外跌落,设计了一种机构来防止圆草捆掉落并可根据实际使用需要自由开闭。图4为防掉落卸载机构图。
该机后端装有防掉落卸载机构,挡板由小油缸控制可以相对车架竖起或平放来完成挡草和卸草动作。在装草时,挡板竖起,链条传动草捆向机器后端运动;当草捆后端接触到挡板时,因有挡板阻挡,即使链条继续运动,草捆也不会再向后运动而掉落。此机构也可防止捡拾车上坡或颠簸而造成草捆掉落。
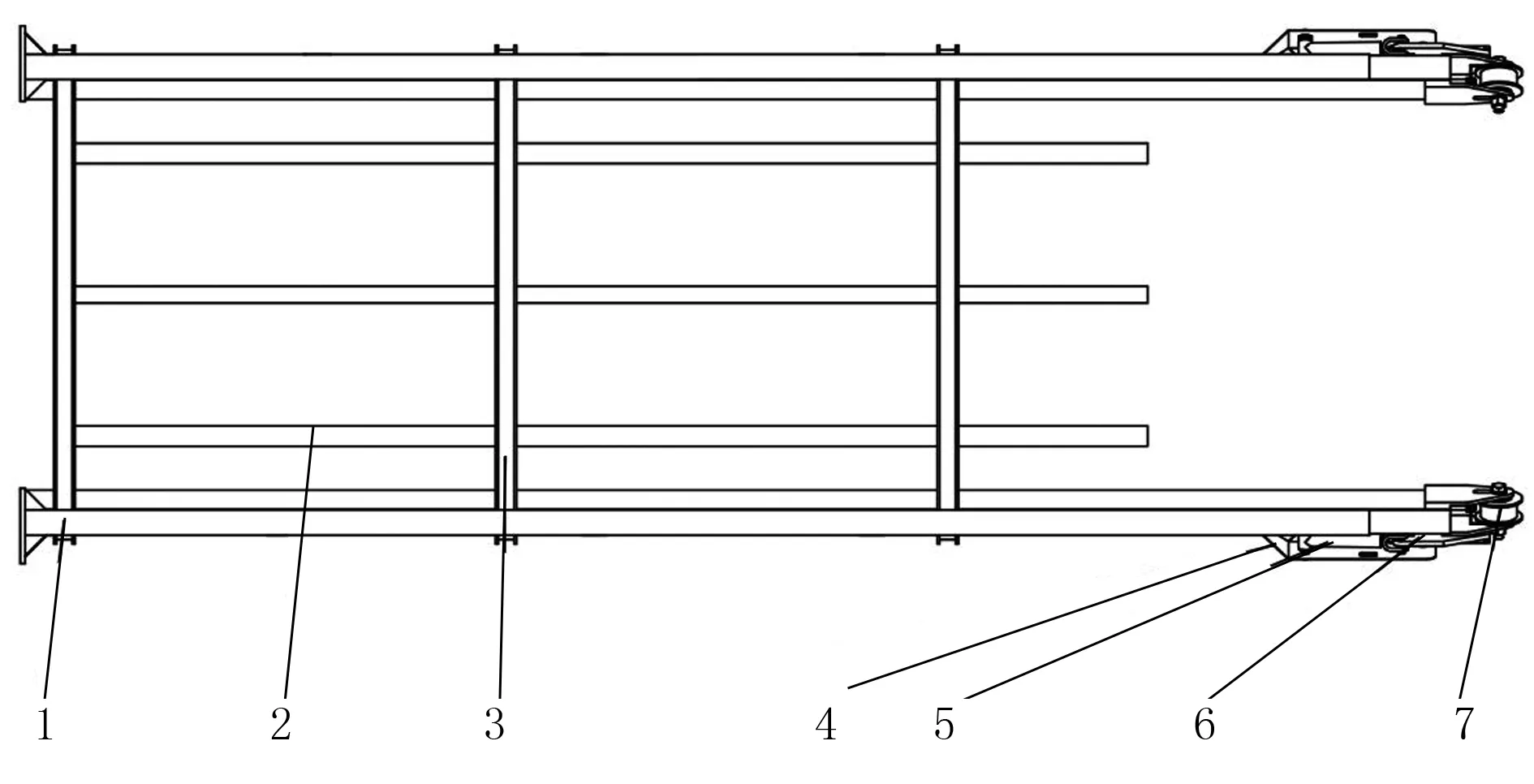
1.横梁 2.加强横梁 3.竖梁 4.卸载支撑板 5.小油缸 6.挡板 7.涨紧小链轮
1.5 液压系统的设计
液压与机械传动、电气传动相比具有安装方便灵活、质量轻、体积小、反应速度快及可实现自动过载保护等特点。液压技术应用到农业机械当中,能够提高农机机械的产品质量和技术含量,是农业机械的发展趋势之一[4]。
该捡拾车液压系统是控制捡拾臂提升、液压马达带动链条运动、挡草板竖起放下、整个车架升高起卸草的动力源。考虑国产拖拉机的液压动力输出系统有两套,设计2组液压阀来控制4组油缸的动作。图5为车架提升、挡草板竖起液压原理图。
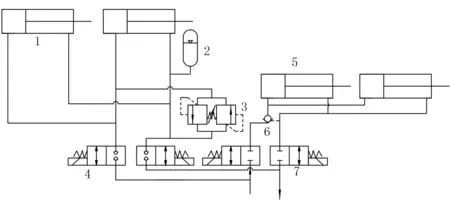
1.挡草板油缸 2.蓄能器 3.双向溢流阀 4.二位二通电磁换向阀(锥阀) 5.车架提升油缸 6.液控单向阀 7.二位二通电磁换向阀(滑阀)
该油路中有2个蓄能器,在装草过程中,挡草板油缸一直竖起,蓄能器可以在油路断开时持续保压。为防止操作员升起挡板油缸时发生误操作或其它原因导致草捆向后力太大损坏油缸和蓄能器,在油路中装有双向溢流阀,当油路压力超过蓄能器额定压力时,溢流阀开启泄压,保护蓄能器和油缸。装草过程中,挡草板油缸伸出,油路断开蓄能器持续保压,为减小该液压系统的内泄露选用4锥阀阀芯的二位二通电磁换向阀。卸草捆时,升起车架提升油缸后断开油路即可,单向阀阻止油缸内液压油回流[5],同时控制链轮链条转动拖拉机向前行驶,圆草捆便可整齐卸车。考虑该油路中有液控单向阀,选择换向阀的阀芯为滑阀结构,以节省成本。
2 悬挂牵引机构的设计与有限元分析
图6为悬挂牵引机构,由钢板和矩形管焊合而成。该机构直接拉动整个车身,其性能好坏直接关系到整个机器是否能正常工作。进行有限元分析可以增加设计功能,减少设计成本,提高产品和工程的可靠性,降低材料的消耗。在产品制造或工程施工前预先发现潜在的问题,将有限元分析方法应用于实践中,有助于提高产品设计的质量与效率[6],所以对牵引架的有限元分析是非常必要的。
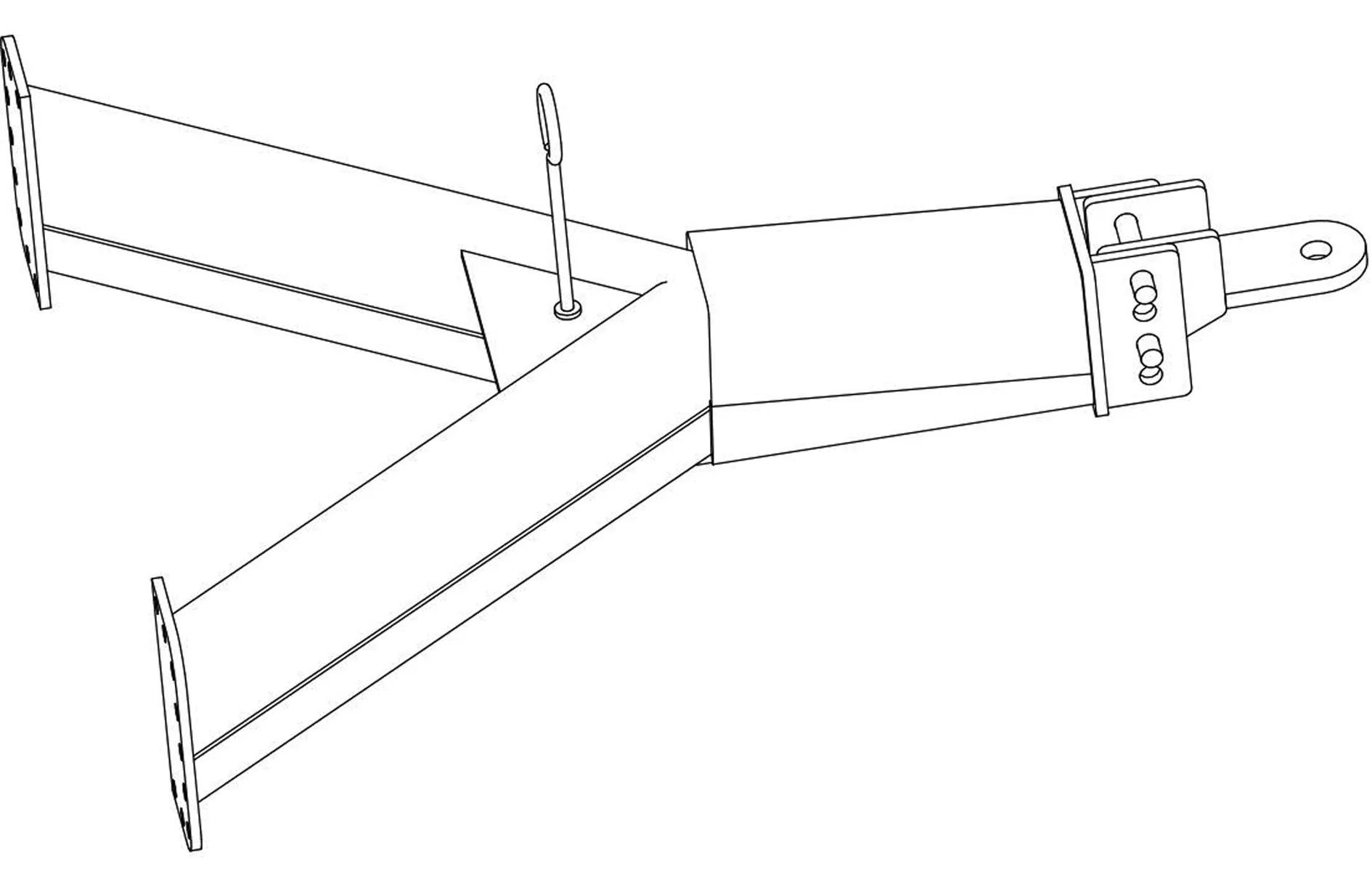
图6 牵引架
选用Pro/E中Mechanica 模块进行有限元分析,操作步骤为:创建三维实体模型、进入Mechanica模块、定义材料为STEEL、添加约束和载荷、创建网格、运行分析、查看结果[7]。
该车总质量3 000kg,按草捆尺寸长1 500mm、直径1 300mm计算,最多可装载6个草捆,每个草捆500kg。假设在30°坡的草地上进行作业,该牵引所受的最大拉力为
Fmax=F下+f
F下=cos60°×30000=15000N
式中 Fmax—机器所受最大拉力;
F下—装草后机器在30°坡时向下的拉力;
f—轮胎和草地的摩擦力;
M—垂直于地面的压力;
r—轮胎半径;
μ—轮胎在农田中的摩擦因数。
该牵引架采用Q235板和矩形管焊合而成,机器所受最大拉力36 650N。经有限元分析(见图7~图9)最大应力在牵引圆孔处和方管连接处为261MPa,查表Q235的抗拉强度为375 460MPa[8],所以该设计完全符合使用要求。
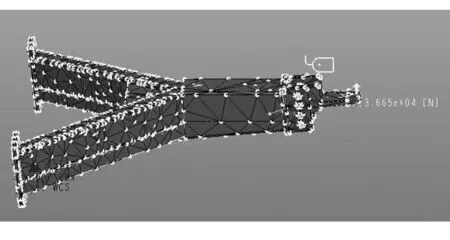
图7 网格模型划分图

图8 最大应力示意图
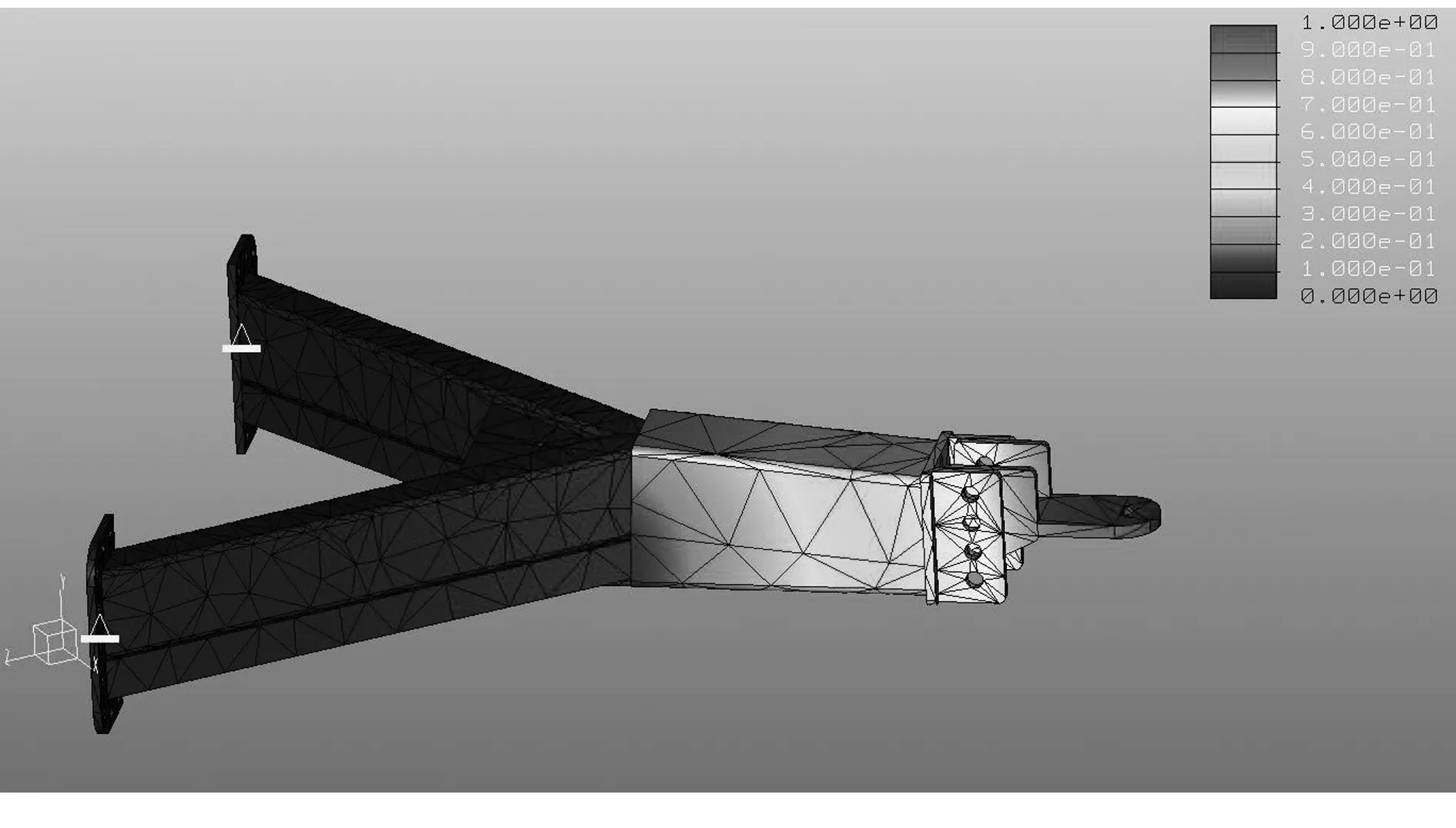
图9 位移分布图
3 试验与分析
实际捡拾过程中,圆草捆轴线方向不可能与捡拾叉中线重合,两者总会成一定的角度,所以试验过程中,圆草捆与机器前进方向的角度在±30°范围内变化。该试验分别在海拉尔区、陈巴尔虎旗等地进行,每组捡拾100个圆草捆,捡拾草捆长1 500mm、直径1 300mm,质量300kg。实地试验如图10所示。试验数据如表1、表2所示。

图10 实地实验图
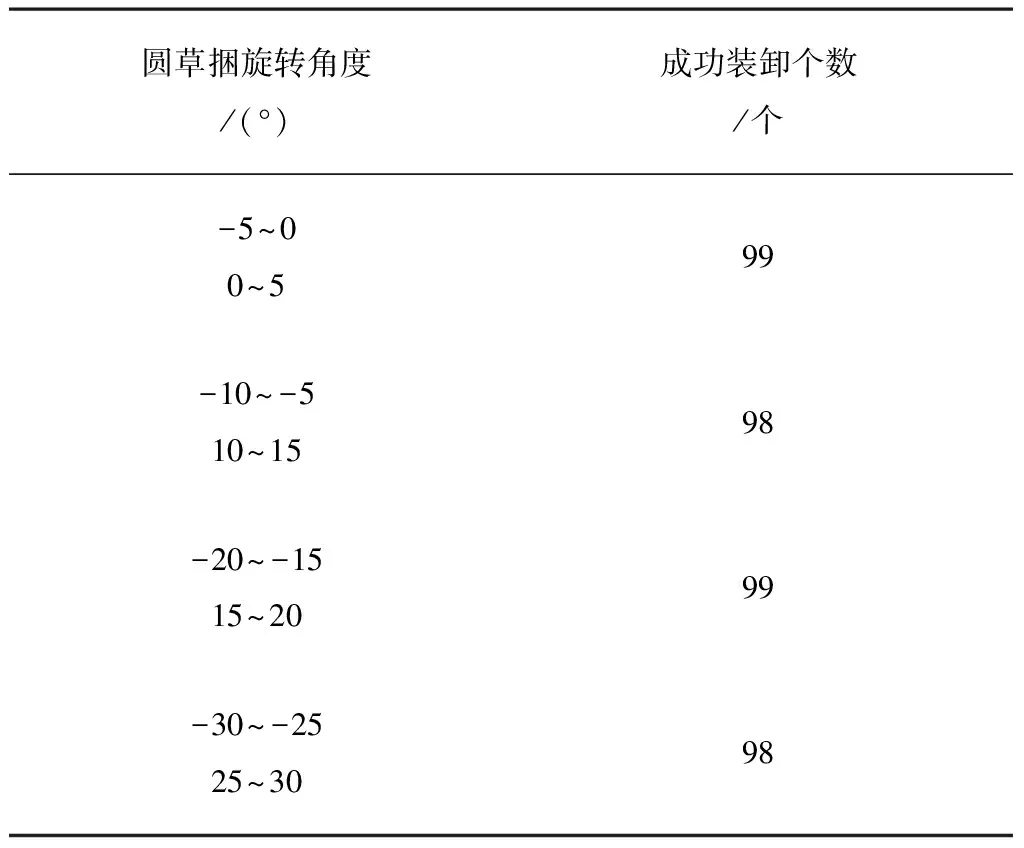
圆草捆旋转角度/(°)成功装卸个数/个-5~00~599-10~-510~1598-20~-1515~2099-30~-2525~3098
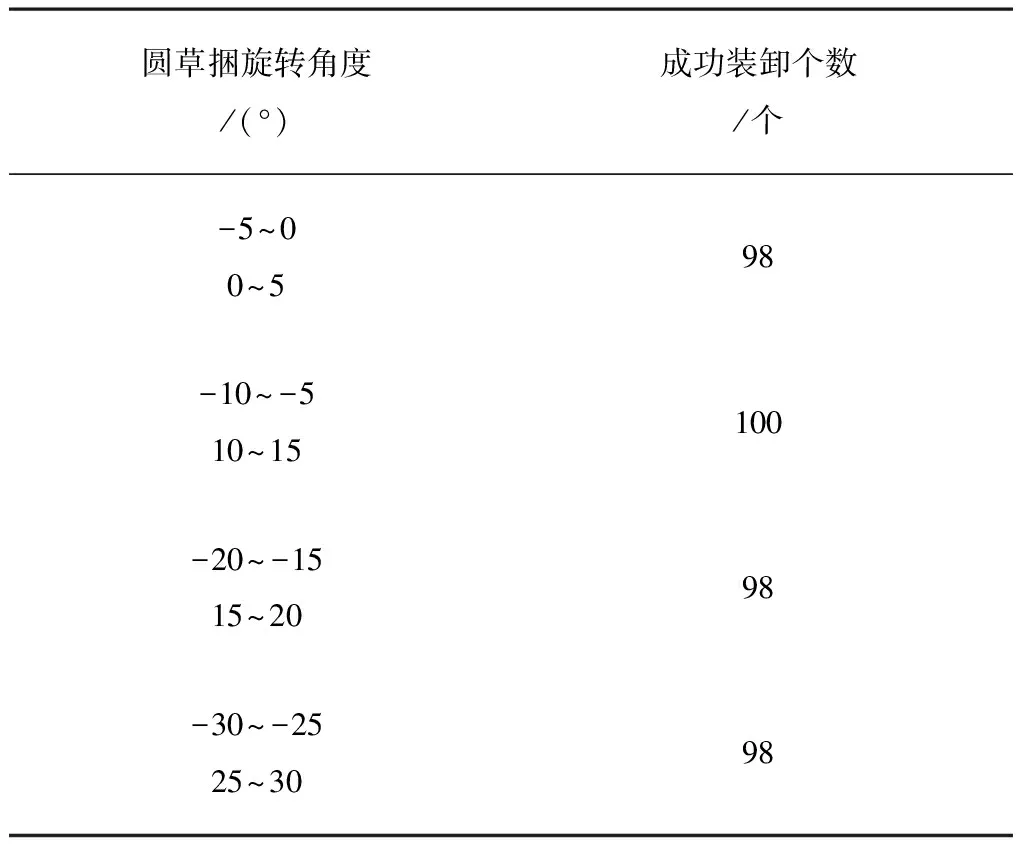
表2 陈巴尔虎旗试验数据表
分析装卸失败原因:①整机焊后焊缝未经打磨,焊缝挂断捆绳导致草捆散落;②草捆存放时间太长导致草捆塌陷变形,装车卸车时草捆易散落;③捡拾臂翻转速度较慢,草捆不易翻转到车架上。
改进措施:①整机焊后需打磨,与草捆接触零件锐角钝化;②打捆机吐包后尽快捡拾并存放;③加大油管与油缸通径,增加油缸进油量,提高捡拾臂翻转速度。
4 结论
该圆草捆捡拾车可以实现任意大小及各种摆放形态草捆的自动捡拾及草捆的自动装车与卸车,整机设计结构简单,操作方便,试验捡拾装卸成功率98%,可以减轻牧民工作强度,提高工作效率。
[1] 李海东.浅谈牧草在生态畜牧发展中的重要作用[J].新疆畜牧业,2010(7):35.
[2] 张乐佳.国内外主要牧草收获机械发展概况[J].农业工程,2014(5):20.
[3] 张圣光.液压系统在农业机械化中的应用及优势分析[J].安徽农业科学,2014(20):6872-6873.
[4] 王超,张云,刘忠舍. 基于CAXA与MATLAB的捡拾臂优化设计与分析求解[J].农机化研究,2016,38(9):180-184.
[5] 高连兴,姬长英.液压与气动[M].北京:中国农业出版社,2007:117-120.
[6] 陈永当,鲍志强,任慧娟,等.基于SolidWorks Simulation的产品设计有限元分析[J].计算机技术与发展,2012(9):177.
[7] 钟日铭.Pro/ENGINEER Wildfire5.0从入门到精通[M]. 北京:机械工业出版社,2010:360-385.
[8] 鄂中凯,张义民. 机械设计手册(1)[K].北京:机械工业出版社,2010:20-26.
A Towed Round Bale Collecting Machine Design and Experimental Research
Yang Zhichao1, Zhang Yun1, Liu Lijuan2
(1.College of Mechanical and Electrical Engineering, Inner Mongolia Agricultural University, Hohhot 010018, China; 2. Hulunbuir Mengtuo Agricultural and Pastoral Development of Science andTechnology Co. LTD,Hulunbuir 021000,China)
To solve the difficulty of short distance transportation of the large round bale, design a kind of round bale pick up the car. The vehicle controlled by hydraulic system to pick up the action of grass and unloading grass agencies, institutions, and use 3 d software Pro/e modeling and simulation, and finite element analysis was carried out on the traction frame, the prototype to a large number of loading and unloading after experiment. Results show that the machine design has simple structure, the design of collecting the strength of the car completely accords with the requirement, the prototype collecting, unloading flexible motion, the field experiment, the car pick up 98% success rate of loading and unloading.
round bale collecting car; towed; simulation
2016-07-01
呼伦贝尔市蒙拓农牧科技发展有限责任公司牧业机械设备生产线改扩建一期工程项目(海经信备案字[2013]03号);一种圆草捆捡拾车(ZL 2015 2 0620975);装备制造业发展专项资金农牧业机械技术改造项目( 海经信备案字[2013]03号);内蒙古自治区创新引导项目(2015 -07)
杨志超(1991-),男,内蒙古包头人,硕士研究生,(E-mail) 411407281@qq.com。
张 云(1958-),男,呼和浩特人,教授,硕士生导师,(E-mail)zhangyund1958@163.com。
S817.11+4
A
1003-188X(2017)08-0242-05
