甘蔗捆绑机的设计与仿真制造
2017-12-16任晓智叶自旺陈云凡
任晓智,孟 强,毕 伟,叶自旺,陈云凡
(广西大学 机械工程学院,南宁 530004)
甘蔗捆绑机的设计与仿真制造
任晓智,孟 强,毕 伟,叶自旺,陈云凡
(广西大学 机械工程学院,南宁 530004)
甘蔗的捆绑现行均为人工,面临着工作效率低、经常出现农民手掌被绳子划伤的问题。为此,设计了一种甘蔗捆绑机,并通过UG进行三维造型的设计,通过Adams虚拟样机进行可行性分析,同时对甘蔗捆绑机的效率进行理论分析。最后,对样机进行试制,实现甘蔗捆绑的半人工半机械化,提高了甘蔗捆绑的效率,减少了农民手掌割伤的情况。
甘蔗;捆绑机;Adams;仿真
0 引言
现行农民对甘蔗捆绑的工作都是纯手工的,其工作效率低且费力,还会出现绳子划伤手掌的情况,以及因捆扎力不够而出现运输过程中甘蔗掉落的问题。应对这一系列的问题,本文设计了一种甘蔗捆绑机,用于捆绑甘蔗,实现甘蔗捆绑的半人力半机械化,提高了生产效率,减少了劳动力,并可获得足够大的捆扎力,避免甘蔗在运输过程中出现应捆扎力不够而掉落甚至散落的状况。
为保证合理的设计方案及良好的工作性能,先通过UG三维造型软件进行三维建模,然后应用Adams虚拟样机进行仿真,以保证该机械的可行性。最后,运用MatLab对结果进行分析,分析该机械的最小夹紧量及最大装载量,以保证甘蔗捆绑机的工作效率可以高于纯人工效率,并满足现行甘蔗运输的运输需求量的要求。
1 结构与工作原理
1.1 甘蔗捆绑机的设计与机构
甘蔗捆绑机主要是由3部分主成,分别为支撑导轨部分、动力传输部分以及夹紧工作部分。其具体由UG三维造型软件得出的模型如图1所示。
1.2 甘蔗捆绑机工作原理分析
甘蔗捆绑机是通过旋转旋转丝杆,来调节运动横梁的垂直高度,以实现夹具的开或合。当旋转丝杠上旋时,运动横梁向上运动,使得夹具打开,实现甘蔗的装载;当旋转丝杆下旋时,运动横梁将向下运动,以实现夹具的收拢,达到捆扎甘蔗的目的。
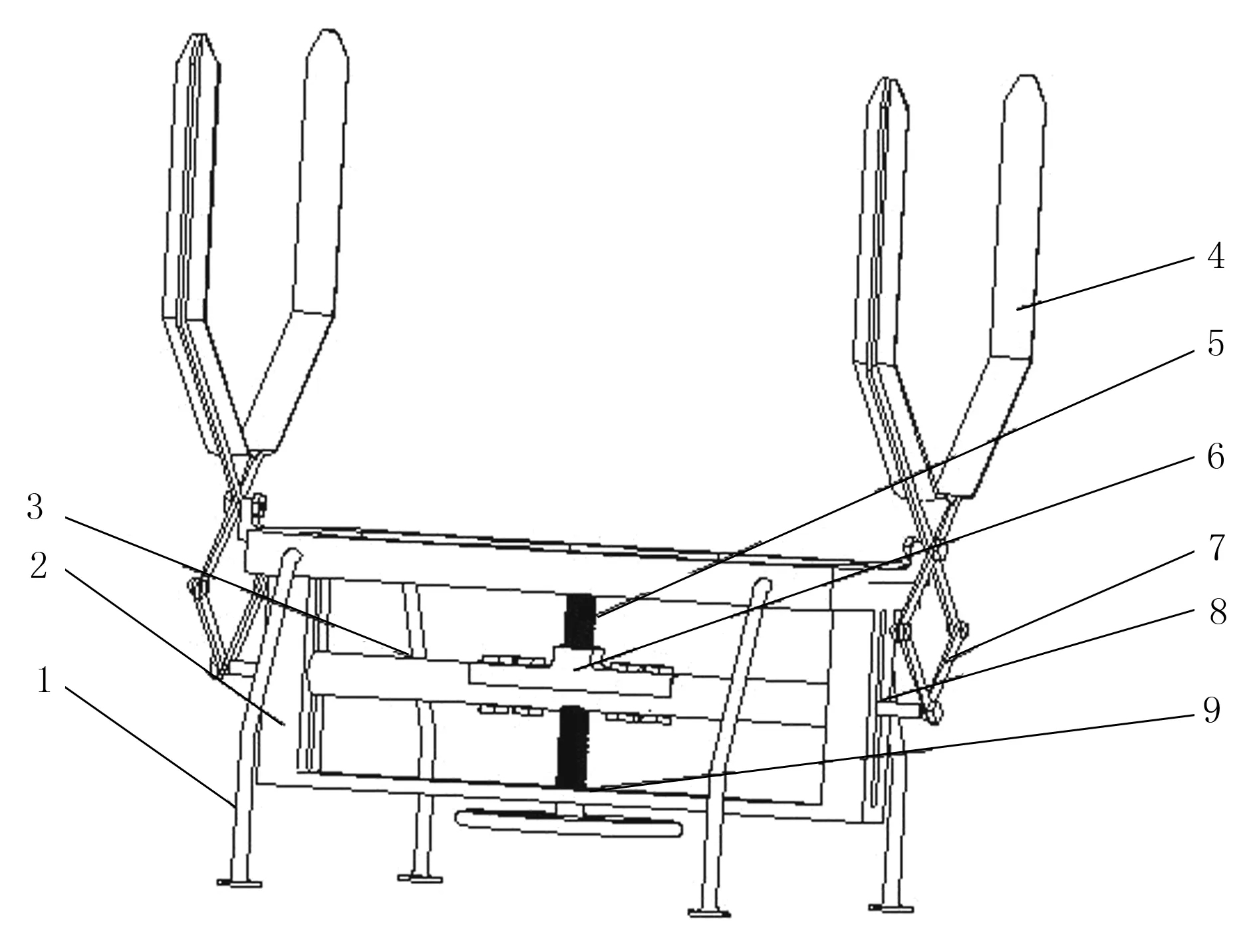
1.支撑脚 2.导轨 3.运动横梁 4.夹具
2 对甘蔗捆绑机的动态仿真
将UG三维造型软件完成的模型导入到Adams虚拟样机中,并进行动态仿真,目的在于验证机械的可行性及是否存在机械运动过程的零件干涉问题。该仿真过程主要从两个方面进行:一方面是上旋过程,即夹具打开过程,也就是装载过程;另一方面是下旋过程,即夹具合拢的过程,也就是夹紧过程。对于以上两种情况,旧机械有左右对称的结构,则只需研究其右边两个夹具即可,命名为夹具1和夹具2。同时,根据夹具的形状,选取极点和拐点进行研究和分析。具体的仿真约束图如图2所示。

图2 甘蔗捆绑机仿真约束图
2.1 甘蔗捆绑机装载过程仿真
在旋转丝杆上施加上旋的扭矩,使得运动横梁向上运动,实现装载过程。研究夹具1和夹具2的极点及拐点的运动轨迹,以确定甘蔗捆绑机的装载量。
1)上旋过程中,夹具1的研究为极点A和拐点B的轨迹研究,其仿真过程的轨迹坐标Y、Z变化如图3~图6所示。

图3 夹具1上旋极点A的y-t图

图4 夹具1上旋极点A的z-t图
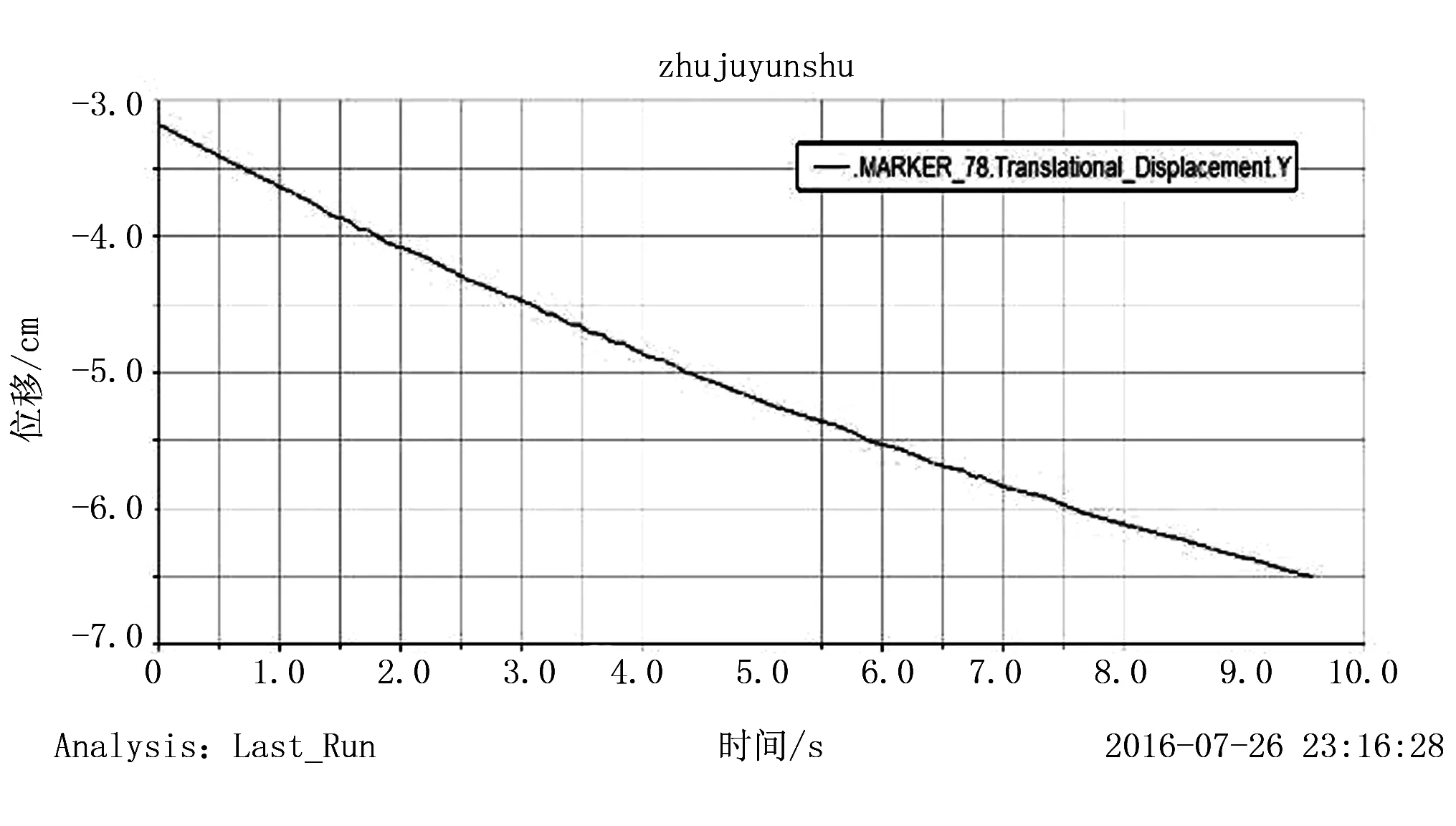
图5 夹具1上旋拐点B的y-t图
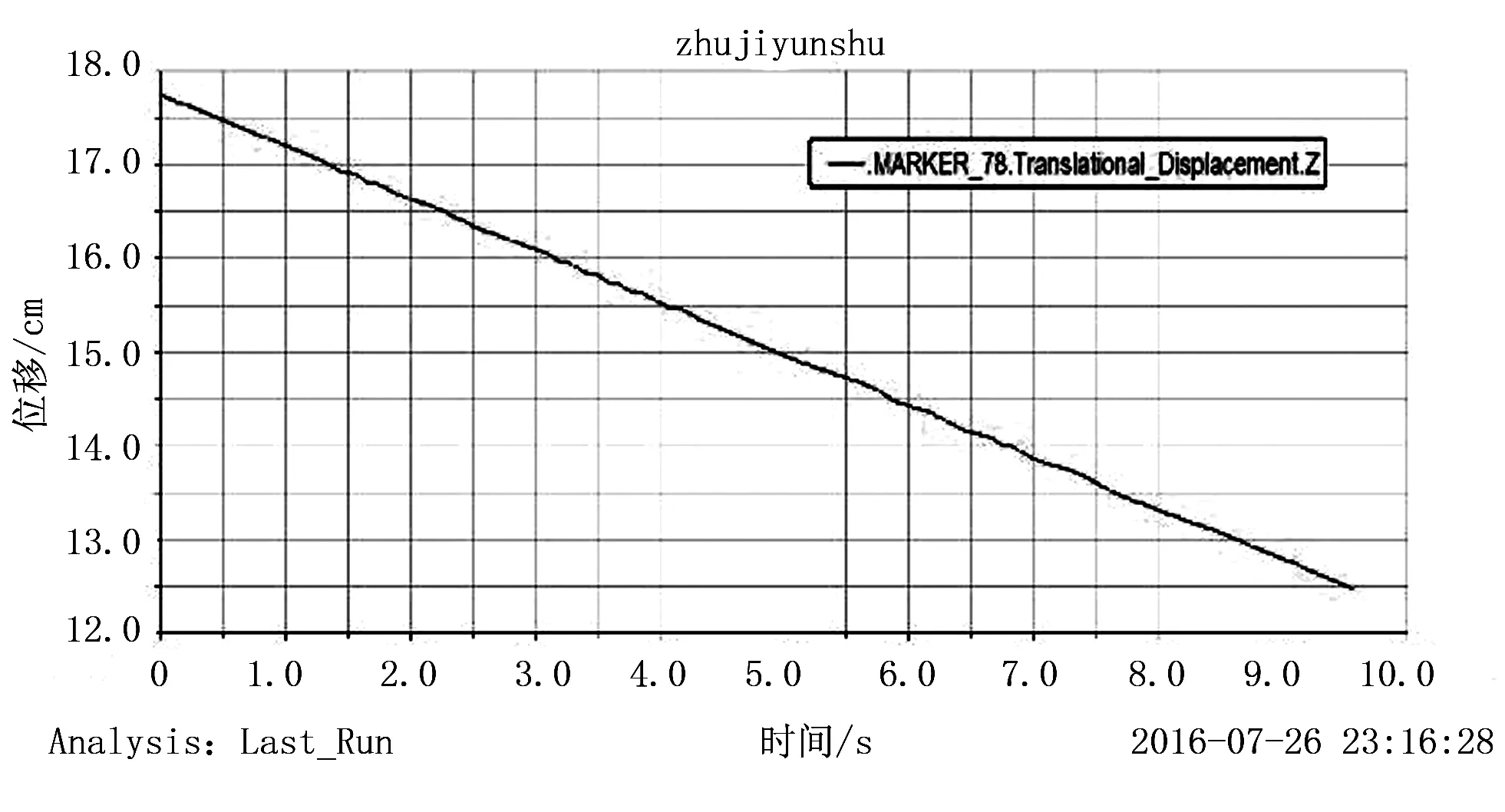
图6 夹具1上旋拐点B的z-t图
2)上旋过程中,夹具2的研究为极点C和拐点D的轨迹研究,其仿真过程的轨迹坐标Y、Z变化如图7~图10所示。
2.2 甘蔗捆绑机夹紧过程仿真
在旋转丝杆上施加下旋的扭矩,使得运动横梁向下运动,实现夹紧过程。该过程研究夹具1和夹具2的极点及拐点的运动轨迹,从而确定甘蔗捆绑机的夹紧量。
1)下旋过程中,夹具1的研究为极点A和拐点B的轨迹研究,其仿真过程的轨迹坐标Y、Z变化如图11~图14所示。
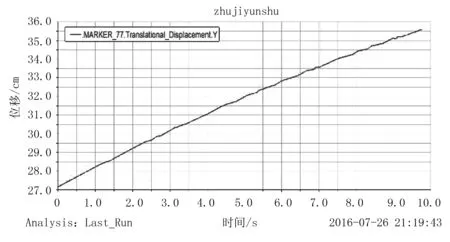
图7 夹具2上旋极点C的y-t图
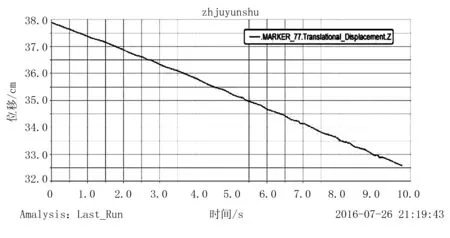
图8 夹具2上旋极点C的z-t图
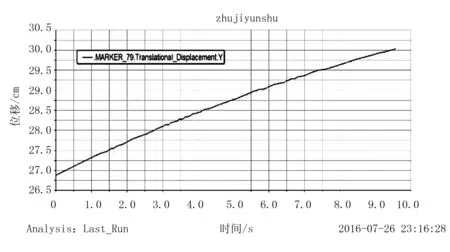
图9 夹具2上旋拐点D的y-t图

图10 夹具2上旋拐点D的z-t图

图11 夹具1下旋极点A的y-t图
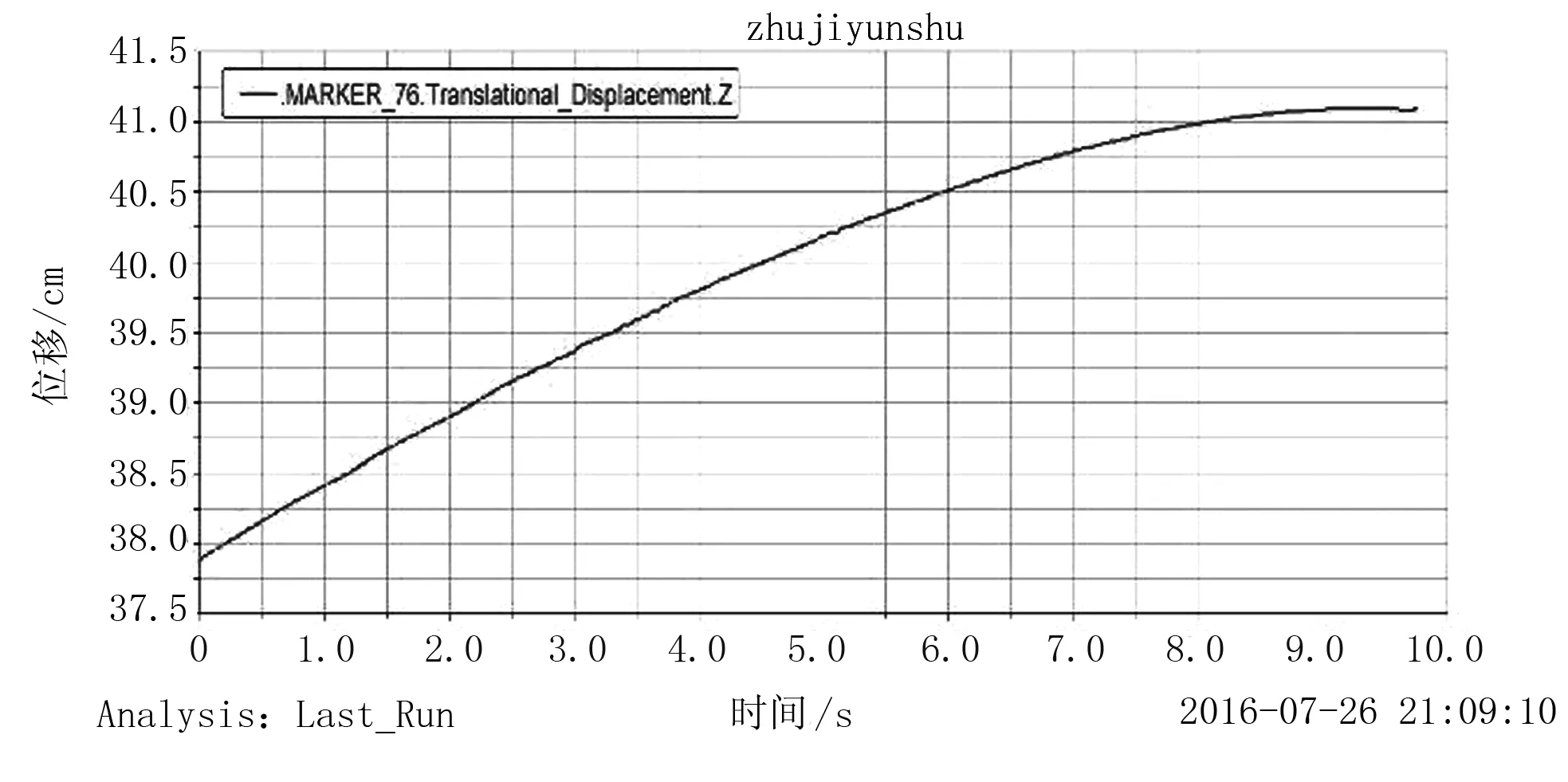
图12 夹具1下旋极点A的z-t图
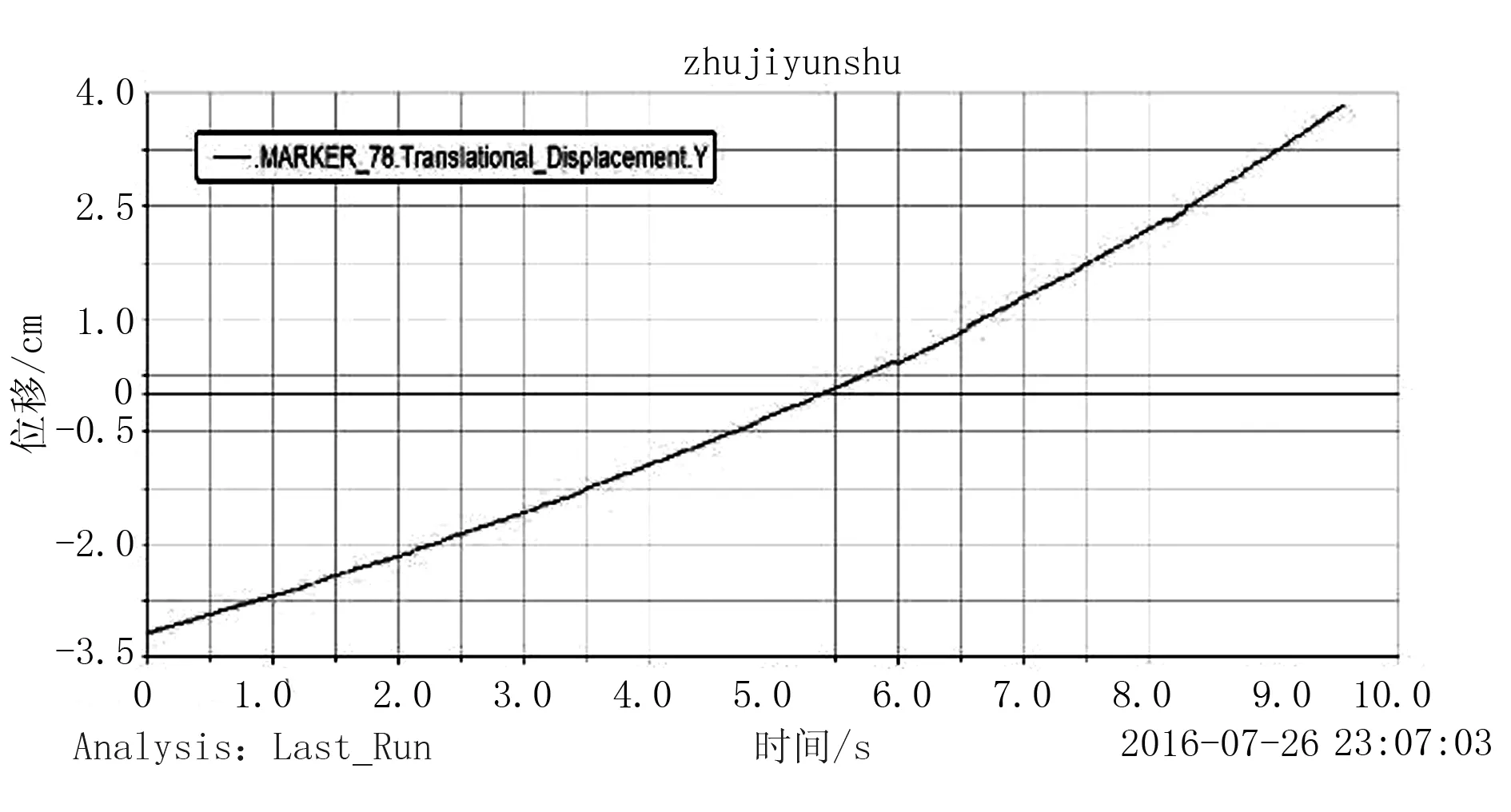
图13 夹具1下旋拐点B的y-t图
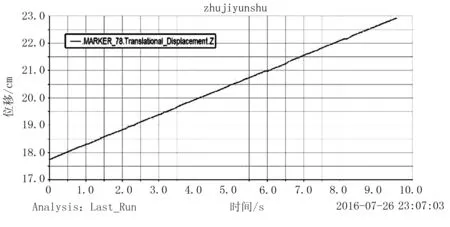
图14 夹具1下旋拐点B的z-t图
2)下旋过程中,夹具2的研究为极点C和拐点D的轨迹研究,其仿真过程的轨迹坐标Y、Z变化如图15~图18所示。
3 甘蔗捆绑机转载量与夹紧量分析
将仿真得到的夹具1和夹具2的极点A、和拐点B、D在上旋和下旋的轨迹坐标导入到MatLab中,画出夹具1和夹具2的运动区域图,以便分析其的甘蔗捆绑机的装载量和夹紧量是否满足现行农民捆扎甘蔗的要求,其夹具运动区域图如图19所示。
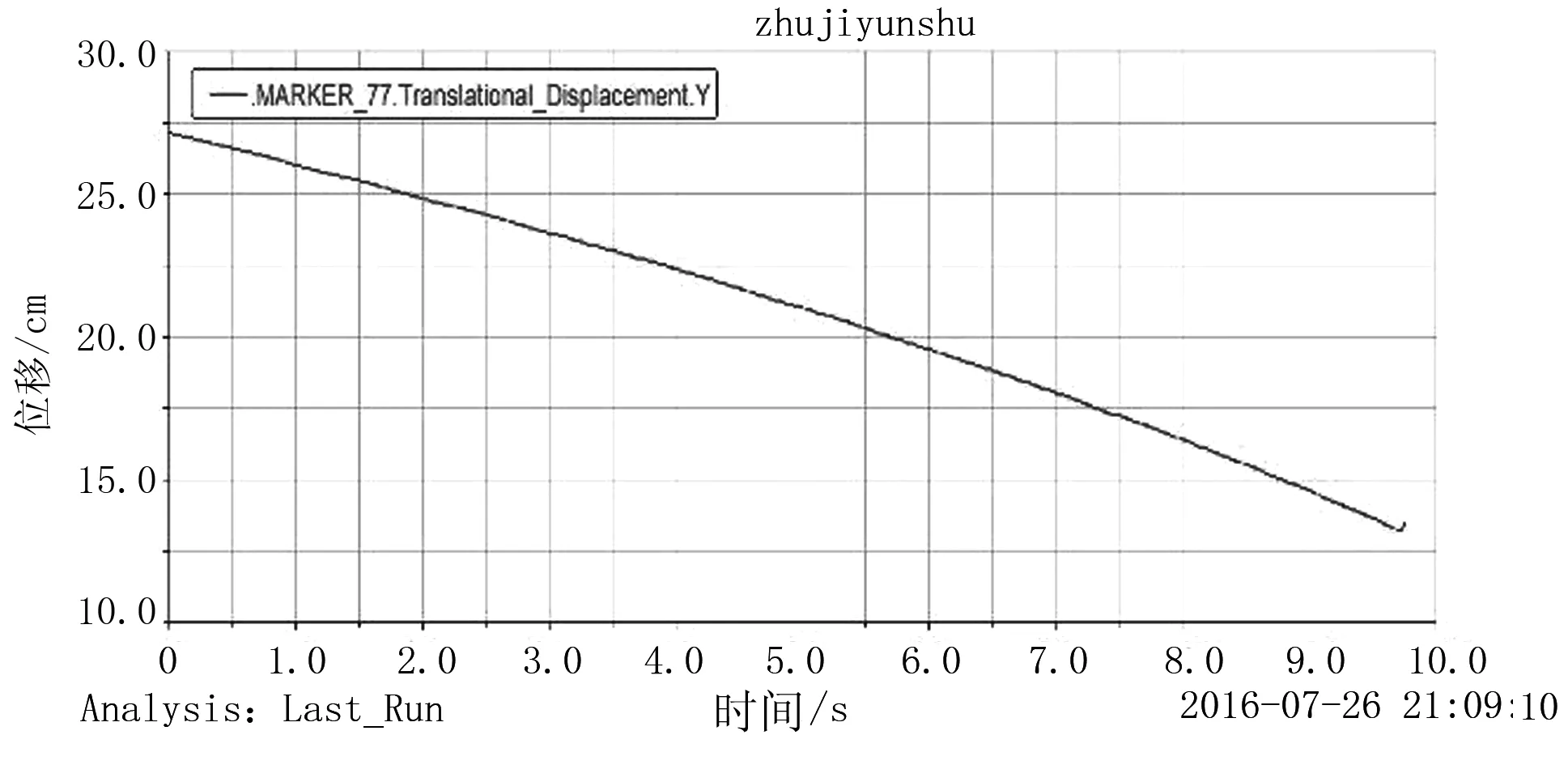
图15 夹具2下旋极点C的y-t图
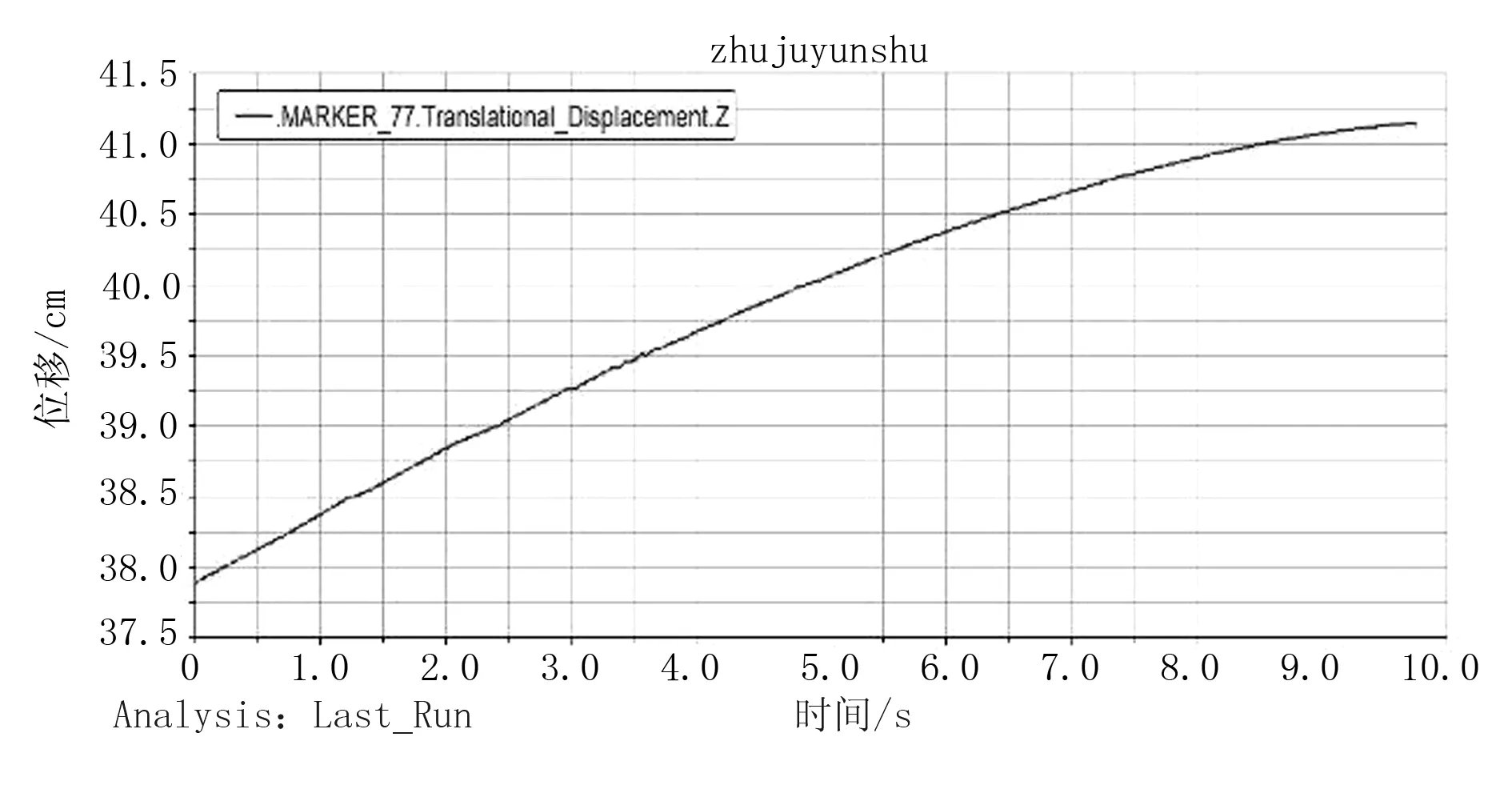
图16 夹具2下旋极点C的z-t图

图17 夹具2下旋拐点D的y-t图
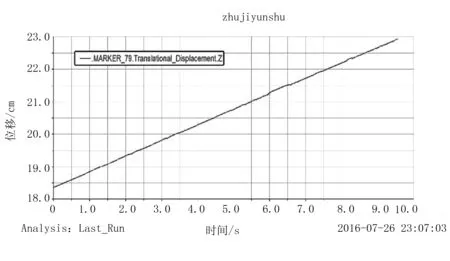
图18 夹具2下旋拐点D的z-t图
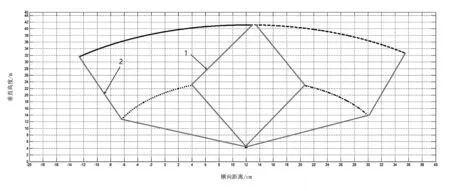
—夹具1极点A轨迹曲线 ……… 夹具1拐点B轨迹曲线 ﹍﹎﹍夹具2极点C轨迹曲线 ﹎﹎﹎夹具2拐点D轨迹曲线
1.下旋刀具极限位置图 2.上旋刀具极限位置
图19 夹具轨迹总图
Fig.19 Fixture assembly drawing
3.1 最小夹紧量分析
根据调查可知:农民所出售的一捆甘蔗为15~25根,其要求最小夹紧量为15根。经统计可知:一般发育的甘蔗直径为4~6cm,其取中间值为5cm。就下旋极限极限位置1分析其甘蔗捆绑机的理论最下夹紧量。由图20可知:其最小理论夹紧量为11根,小于要求最小夹紧量,所以是满足农民的需求的。
3.2 最大装载量分析
由上述调查结果可知:农民的大捆甘蔗要求为25根。为验证是否满足这一要求,将以装载极限位置2进行分析,如图21所示。由图21可知:最大装载量大于25根一捆,也是满足要求的。
4 甘蔗捆绑机的试制与效率实验
根据仿真可知甘蔗捆绑机的可行性,并应对农民对单捆甘蔗数量的要求,具体确定各零部件的具体数值,并进行试制,其实物如图22所示。
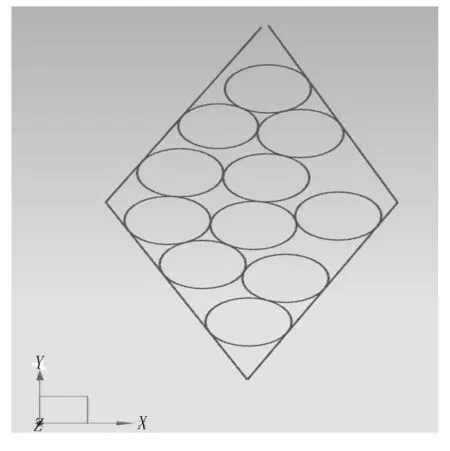
图20 理论最小夹紧量示意图
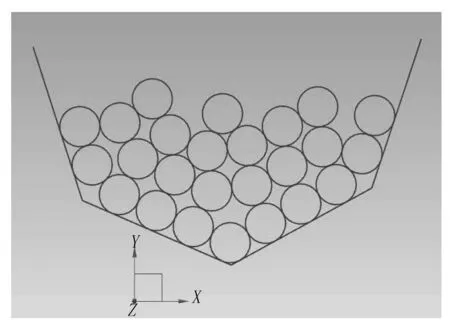
图21 装载量验证示意图

图22 甘蔗捆绑机实物拍摄图
为保证其甘蔗运输机的生产效率与其运输效率相适应,则进行实际试验,其效率如表1所示。

表1 甘蔗捆绑机实际效率测定
5 结论
由仿真结果可知:甘蔗捆绑机具有可行性,并具有良好的适应性,实现了甘蔗捆绑工作的半人力半机械化,减少了劳动力。该机不但满足了农民对甘蔗单捆数量的要求,而且也适应于高效运输的要求。除此之外,其结构简单,工作可靠,具有良好的推广前景。
[1] 范雨,蔡敢为.一种甘蔗捆绑机的设计与可靠性研究[J].制造业自动化,2015(7):110-113.
[2] 石浙溪,吕新,左传伟,等.农作物捆绑机曲柄轴承密封设计改进[J].轴承,2016(2):12-13.
[3] 刘峰梅,闫林平,李英华. YKJ-1型园艺带式捆绑机的研究[J].山东农机,2000(3):11-12.
[4] 刘峰梅.园艺带式捆绑机[J].江苏农机与农艺,1998(6):28.
[5] 张继红,王桥医. 包装机械系统运动方案的创新设计[J].包装工程,2007(2):72-74.
[6] 刘守谦.现代包装机械的创新设计[J].轻工机械,2007(1):6-8.
[7] 王东爱,刘美华,乔志霞.虚拟样机技术及其在包装机械设计中的应用[J].组合机床与自动化加工技术,2006(11):33-35.
[8] 徐书洁,朱红英.包装机械运动仿真系统的研究[J].包装工程,2002(4):62-63,66.
Sugarcane Bundling Machine Design and Simulation of Manufacturing
Ren Xiaozhi , Meng Qiang, Bi Wei , Ye Ziwang, Chen Yunfan
(College of Mechanical Engineering , Guangxi University , Nanning 530004 , China )
for the cane bound current are artificial, facing a low working efficiency, and farmers often appear palms by the scratch problem, this paper proposes a called sugar cane bundling machine farming machinery, and through the UG three-dimensional modeling design, feasibility analysis, through the Adams virtual prototype and theoretical analysis on the efficiency of sugarcane binding machine, the final trial production, it is concluded that the actual work efficiency and realize the sugar cane bound half human half mechanization, improve the efficiency of sugar cane bound, and reducing the farmers hand cut.
sugarcane; bundling machine; Adams; the simulation
2016-08-10
广西制造系统与先进制造技术重点实验室项目(1305109S 03);广西大学国家级大学生创新创业训练计划项目(201410593052)
任晓智(1973-),女,山东莱州人,讲师,(E-mail)xioazhiren826@163.com。
S229+.1
A
1003-188X(2017)10-0088-05
