基于逆向工程的水稻精准模型构建及试验验证
2017-12-16吴崇友
陈 晨,吴崇友,江 涛
(1.安徽农业大学,合肥 230036;2.农业部南京农业机械化研究所,南京 210014)
基于逆向工程的水稻精准模型构建及试验验证
陈 晨1,2,吴崇友2,江 涛2
(1.安徽农业大学,合肥 230036;2.农业部南京农业机械化研究所,南京 210014)
为了更加切实反映水稻谷粒在介质中的运动及颗粒间的碰撞情况,利用逆向工程技术建立谷粒的精准三维模型。使用三维扫描仪测得饱满籽粒和瘪谷的点云数据,在后处理软件中经过数据处理、曲面重构最终生成质量较好的谷粒三维模型,与实际谷粒误差均小于2%。为了进一步验证基于逆向工程方法所建谷粒模型的准确性,采用离散元素法,将构建的谷粒不同模型导入离散元软件中,进行堆积角的仿真模拟及试验验证。堆积角的对比仿真模拟及试验表明:颗粒模型对堆积角的形成有较大影响,所构建模型模拟得到的堆积角与实际试验结果误差更小(3%以内)。该模型可更好地反映水稻籽粒间的接触碰撞和摩擦运动,为水稻籽粒收获清选过程中的动力学仿真分析提供了一种准确性和实用性更高的模型。
水稻;谷粒模型;逆向工程;三维激光扫描; 离散元
0 引言
联合收割机田间作业时,作物需经过切割、输送、脱粒和清选4道工序。经过脱粒滚筒分离后进入清选室的物料是几何形状不规则、物理特性差别很大的多种脱出物的混合物[1-2],包括饱满籽粒、不饱满籽粒(瘪谷)、长茎秆、短茎秆及碎叶等。从占比看,谷粒(饱满谷粒)占比最大[3],因此是清选仿真物料建模的重点。在以往的谷粒仿真中,为了方便模拟、减少计算量,大多进行了简化处理:将谷粒近似为球体,茎秆近似为长圆柱体[4-5];但由于仿真模型与实际物料差别较大,影响了颗粒物料在介质中运动和颗粒间碰撞动力学仿真效果[6-10]。因此,建立更加逼真的谷粒物料模型是更好地进行收割机清选仿真的重要前提。
随着科学技术的发展,相关学者对物料建模的研究也在不断进步,如采用多个球体粘结在一起构成颗粒聚合体的方法来模拟颗粒表面[11-13]。更有学者展开精准建模研究,采用数字图像技术、CT扫描技术获取颗粒外形信息,进而建立出精度高且球体数量可控的颗粒模型[14]。近年来,一种新兴的测绘技术被广泛应用于各领域,三维激光扫描技术因具有精度高、实效性强和对任何不规则物体都能扫描的特点,在农业中已开始被应用于作物建模、生长周期分析和对比。逆向工程又称反求工程,就是对已存在的实物模型或零件进行测量并根据测量数据重构出 CAD 数字模型[15]。三维激光扫描技术具有广泛的应用,运用该技术将形状不规则的水稻脱出物转化为精准的三维模型,并应用于离散元仿真软件进行堆积角的对比分析,为后期的动力学分析和软件仿真奠定重要基础。
1 材料与方法
1.1 材料准备
水稻脱出物中的组成成分主要有饱满的籽粒、未完全成熟的瘪谷、破碎的短茎秆及其他轻杂余物质。由于轻杂余所占比例不高且成分多样、质量较小,其形状大小完全可以忽略不计。另外,茎秆因经过割台、输送槽和脱粒滚筒的挤压,形状发生较大变形,没有一定厚度的直径,因此也不宜采用此种基于逆向工程的建模方法。本次建模只针对脱出物中的饱满籽粒和瘪谷。
本次建模的对象是南粳9103水稻,水稻脱出物样品取自河南信阳试验地。由于水稻脱出物的形状差异大,其尺寸特征通常需要提取特征后采用统计平均的方法进行描述。从样品中分别随机选取8组饱满籽粒和瘪谷,每组10粒,对其分别测量三轴尺寸,每组取平均值结果如表1所示。
1.2 建模方法
逆向工程技术进行物料建模,首先通过对样品的实物扫描测量获得大量的点云数据,然后由专业处理软件和手段对数据进行预处理,最后充分利用成熟的 CAD/CAM 技术,快速、准确地建立三维实体几何模型[16-17]。逆向工程技术多应用于机械行业的产品制造加工,而在农业工程领域的研究与报道较少,本文将采用此项技术建立水稻籽粒的三维模型,为后续研究提供参考。其工作流程如图1所示。
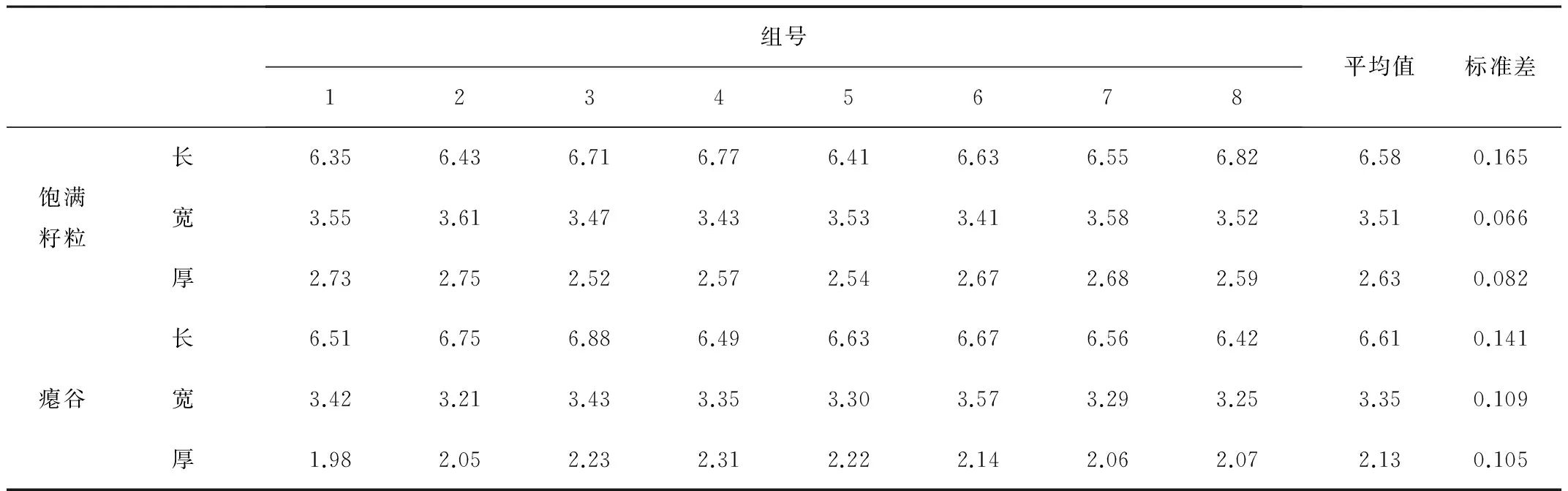
表1 三轴尺寸测量结果
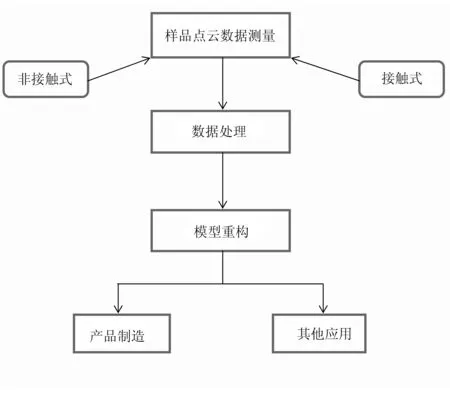
图1 逆向工程工作流程
点云数据的测量可通过接触式和非接触式两种方法。接触式测量是一种机械探头直接接触样品表面逐点测量的方法,虽然测量方法稳定,但受直接接触测量的限制,某些微小零件样品或细节之处不易测得。另外,机械探头的逐点测量必然导致测量速度受限,不能得到足够多的数据点来反应真实样品零件。李骅等便是运用接触式测量的方法,构建的谷粒模型与实际样品在细微之处存在较大差异[18]。非接触式测量方法是基于光学、声学、磁场原理的数据采集方法。其中,应用光学原理的方法采集数据速度快,主要有激光三角形法、结构光学法及图像分析法等[19]。非接触式测量具有精度高、测速快、数据量大等特点,对于易碎、易变形或不可直接接触的微小零件都可测量,避免了探头接触时产生的测量误差,更好地反映了样品零件的外形特征。
2 水稻脱出物点云数据测量
本次测量所使用的是杭州先临公司自主研发的Shining3D-Scanner2.2扫描仪,具有高效率、 高精度、 高寿命及高解析度等优点, 特别适用于复杂自由曲面的逆向建模。在进行数据采集前首先要对系统标定,鉴于本次测量对象,选取最小尺寸(80×100mm)标定板,标定好的精度将直接影响系统的扫描精度。
由于水稻籽粒形状特殊、体积太小、不易操作,实际测量时于准备好的待测样品中随机选取5粒饱满粒和5粒瘪谷粒(剔除形状差异大的),利用粘性物质(如橡皮泥)将谷粒固定在待测平台上,再在谷粒周围随机粘贴上标志点,如图2所示。
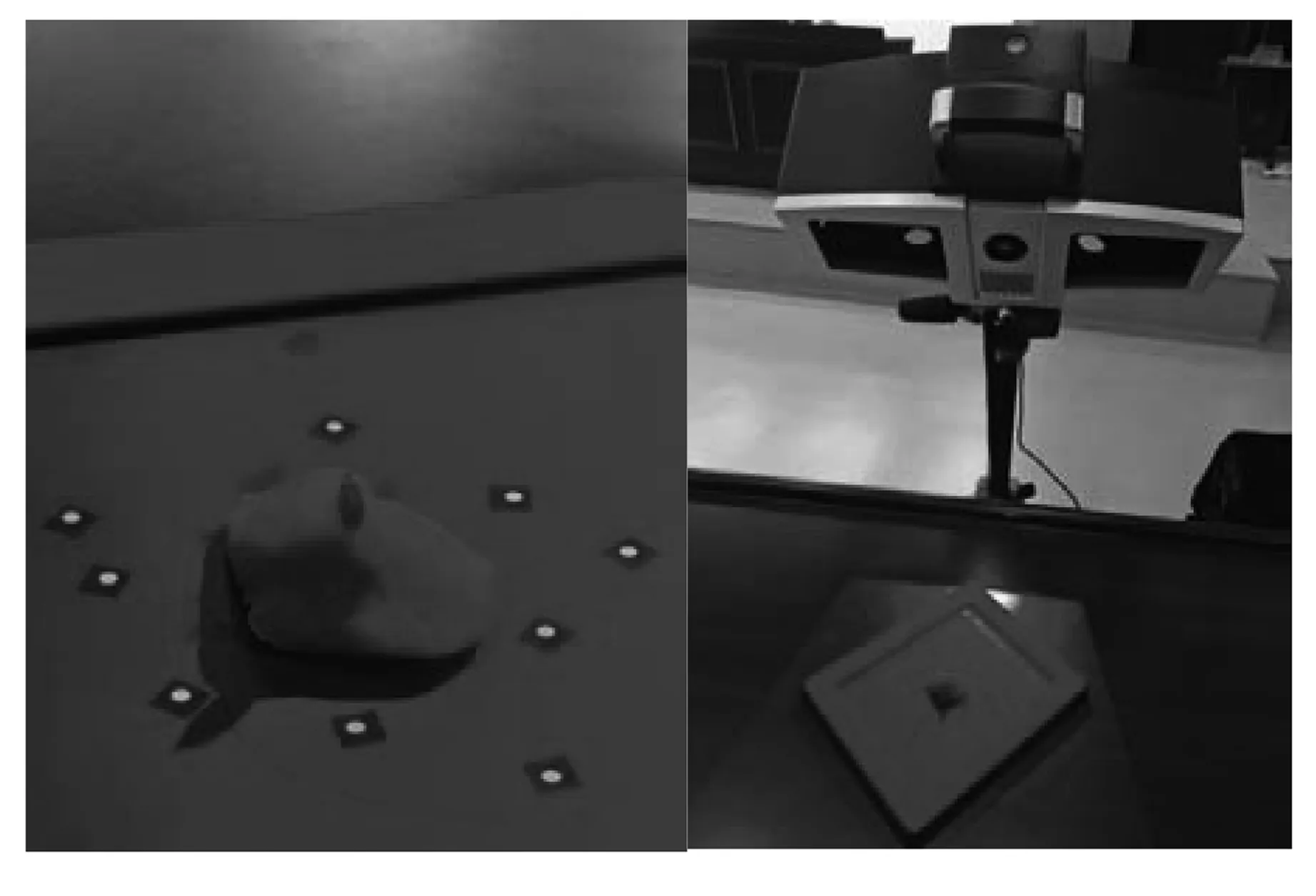
图2 待测谷粒和实验平台
将待测平台摆放平稳后开始扫描,每次扫描时投影仪只能将光栅投射到正对它的物体表面。因此,一次扫描完成后,待测平台及其固定在上面的谷粒需要转动一个角度,以便于对各个曲面进行扫描操作;同时必须保证谷粒相对于标定板的位置不能发生偏移,否则标志点将无法自动拼接。1周扫描完成后,可先将此次测得的所有点云数据导出,而谷粒尖端由于被遮挡了一部分,获得的点云数据不完整,因此将谷粒旋转180°,以被遮挡住的尖端朝上固定,再以同样的方法扫描谷粒1周。在扫描时,还要观察计算机中显示的点云数据, 应该将点云稀疏或缺失的部分多次扫描,确保采集的点云数据的完整性。采集的数据点云图如图3所示。
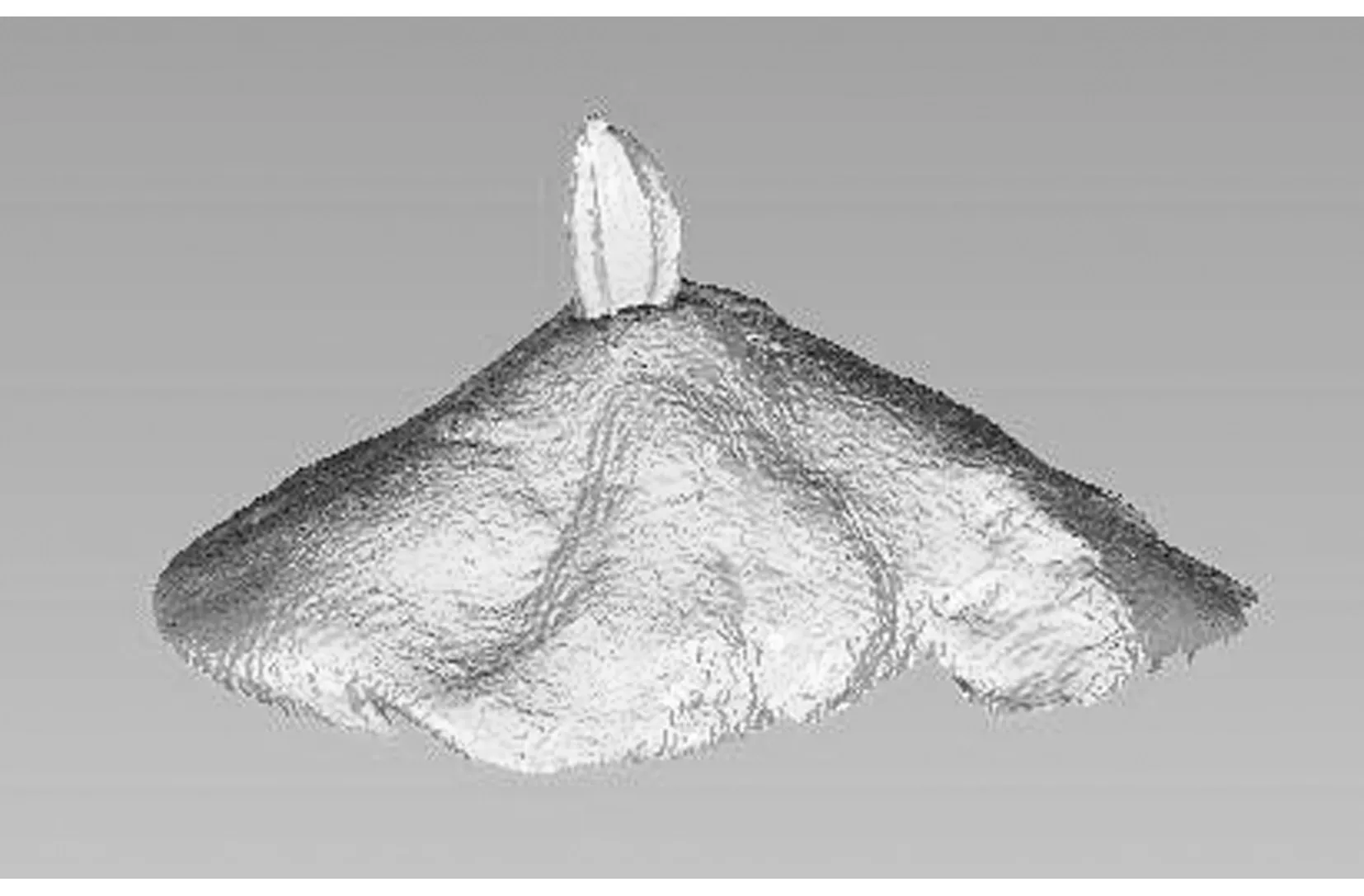
图3 采集到的数据点云图
3 三维模型重构
3.1 数据处理
由于场地光源、测量方法和模型表面质量等因素的影响,通常会使扫描所得的点云数据中包含有误差。 其中,一部分是冗余点和噪声点,其在后续的三维建模过程中会严重影响所建模型中某些曲面和曲线的重构操作。 因此,为了能获取较好的点云数据,有必要对原始数据进行预处理操作。
数据预处理是对采集到的点云数据进行降噪、采样、注册等一系列的操作,从而将采集到的点云数据变得更完善、更合理,保证后续模型重构的准确性。首先在后处理软件中,以mm为单位分别导入测得的点云数据群。从图3可以看出:在谷粒表面点云数据扫描过程中,固定样品的粘性物体、待测平台及激光扫描过程中的光线散射等因素导致谷粒表面点云数据中包含大量多余的点和噪声。这些噪声是由多幅点云数据重叠在一起,因此无法直接圈选删除,必须在贯通和背景模式下进行处理。对于不同视角扫描到的点云数据,需要先进行全局注册,使初始拼接的点云对象更加精细;接着,通过联合点对象命令来滤除多余的数据点;最后,将两次扫描的点云分别建组,为手动拼接做好准备。
因测量对象特殊,无法一次完成整个谷粒的扫描,因此需要对上下两组点云进行手动注册,通过n点注册的方法,在定义集合里以其中一组点云作为固定,另一组作为浮动,将上面两个窗口的点云片转动到相同方位,放大模型寻找显著特征,如图4所示。n点注册要求选中3个及以上的共同特征,而特征点的选择直接影响到谷粒的拼接效果。手动注册完成后,还需要通过全局注册进行再次拟合,从而得到更加精确的模型。注册后的模型需要通过联合点对象将多幅点云联合为一个,然后封装成一个多边形网格。填充网格面上明显可见的孔洞,利用网格医生自动修复缺陷,如删除钉状物,去除特征、填充孔等。

图4 谷粒的手动拼接图
3.2 三维模型生成
三角网格的多边形阶段表面质量较差且面过多,为了得到质量较好、面较少的NURBS曲面,多边形网格的处理起到了重要作用。网格面处理的越光滑平顺,拟合后得到的NURBS曲面质量越好。NURBS 方法是非有理 B 样条方法在四维空间的直接推广,多数非有理 B 样条曲线曲面的性质及其相应算法也适用于 NURBS 曲线曲面,国际标准化组织(ISO)更是将其作为描述产品几何形状的唯一数学方法[20]。
NURBS(非均匀有理B样条曲线)和曲面的简称,表达式为
(1)
其中,Vi为控制控制顶点;Wi为权因子;Bik(u)为k次B样条基函数。基函数仍由递推公式定义为
(2)
其中,k为幂次;ui(i=0,1,…,m)为节点矢量U。
U=[u0,u1,…,um]
(3)
当节点数为(m+1)、幂次为k、控制顶点数为(n+1)时,m、k和n三者之间的关系为m=n+k+1。
对于非周期的B样条,节点矢量为
U={0,0,0,…,uk+1,…,um-k-1,1,1,1}
(4)
曲线通过控制多边形首尾两端各有的n+1各节点来使端点与首、末两条边相切。NURBS曲线的生成即为通过控制点来决定的,除了控制点外还有曲线的方向、曲线的段、编辑点、结构线、起点和终点这些因素共同影响着曲线的生成。
NURBS曲面则由表达式(5)定义,即
(5)
其中,Bik、Bji分别为NURBS曲面u和v参数方向的B样条基函数;k、i为B样条基函数的阶次。通过NURBS曲面建模得到的形状更易于控制,效果也更加逼真。图5~图8为最终生成的谷粒模型。
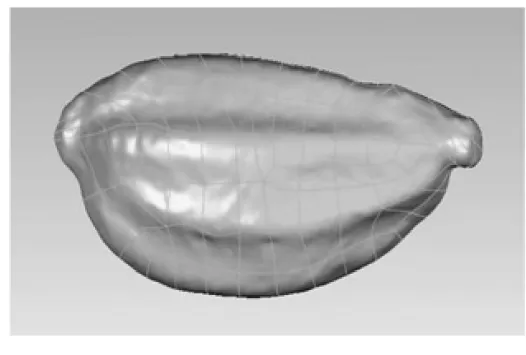
图5 籽粒正视图
Fig.5 The positive viewof plump grain
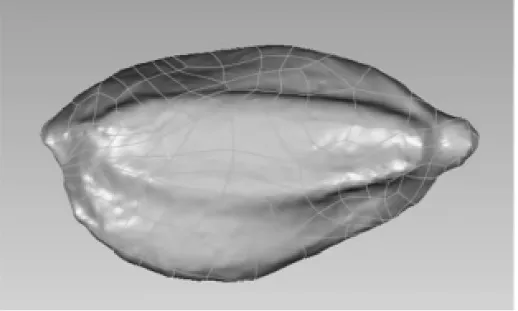
图6 瘪谷正视图
Fig.6 The positive view of deflated grain
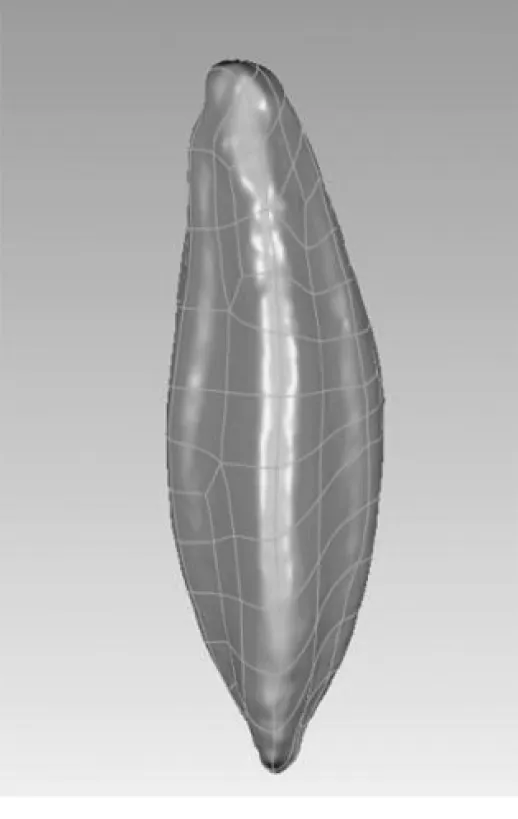
图7 籽粒侧视图
Fig.7 The side view of plump grain
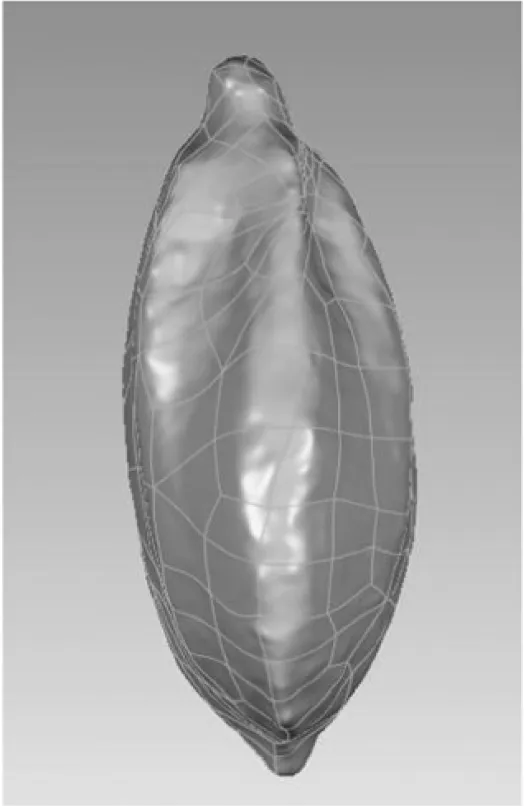
图8 瘪谷侧视图
Fig.8 The side view of deflated grain
3.3 尺寸误差分析
将重构的三维模型导入Pro/E中测量其三轴尺寸,结果取平均值,与实际谷粒的尺寸特征对比如表2所示。

表2 谷粒模型及实体的三轴尺寸
用球形率来表述籽粒和瘪谷的形状特征,根据上述测得的三维尺寸参数求出相应的等效直径D。计算关系为
式中L—籽粒的长度;
W—籽粒的宽度;
T—籽粒的厚度。
计算出的等效直径后,再由公式φ=D/L分别求得籽粒和瘪谷的球形率(Φ),如表3所示。
表3 谷粒模型及实体的等效直径和球形率
Table 3 The equivalent diameter and spherical rate of grain model and entity mm
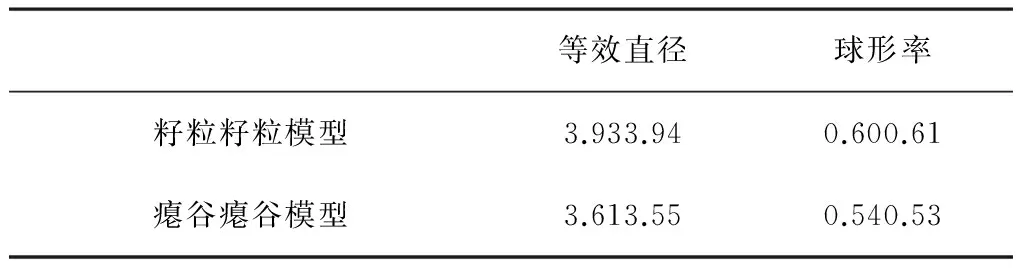
等效直径球形率籽粒籽粒模型3.933.940.600.61瘪谷瘪谷模型3.613.550.540.53
根据表3所测数据计算出模型尺寸与实际误差均小于2%,球形率所表征的形状特征也基本一致。
4 堆积角的应用
颗粒堆积是一种颗粒系统的静力学现象,而堆积角是指颗粒物料从高处自然缓慢下落到某一平面,稳定后所形成堆体的母线与底面之间的夹角,其形成主要受颗粒内摩擦特性和颗粒间流动性的影响[21-24]。本次研究采用离散元素法[25-26],该方法广泛应用于农业散体物料的仿真分析[27-29]。
4.1 离散元参数仿真
堆积角的测定采用漏斗法[30],仿真实验模型由漏斗和位于漏斗正下方的底板组成,材料均为钢。漏斗规格依据水稻颗粒尺寸确定[31],入口直径为100mm,出口直径为30mm,高为90mm,底板直径为250mm,如图9所示。选用两种谷粒模型为研究对象,一种为上文基于逆向工程建立的谷粒模型,一种为比照稻谷实际三轴尺寸建立的九球聚合模型,如图10所示。
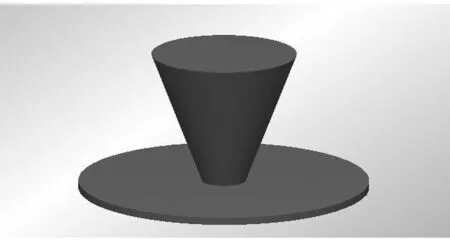
图9 仿真实验模型
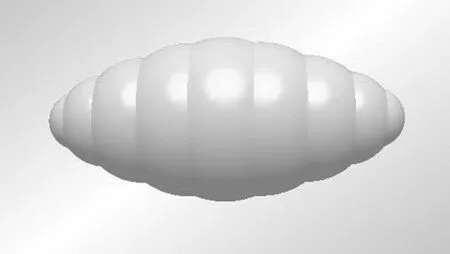
图10 谷粒九球聚合模型
仿真过程中,分别将3 000个谷粒模型注入到漏斗中, 当漏斗注满后开始以0.05m/s的速度向上提升,物料模型从漏斗出口缓慢流出,最终稳定的堆积在底板上。两种谷粒模型的仿真分别重复进行5次,仿真结果如图11、图12所示,经软件后处理工具所测得的堆积角如表4所示。
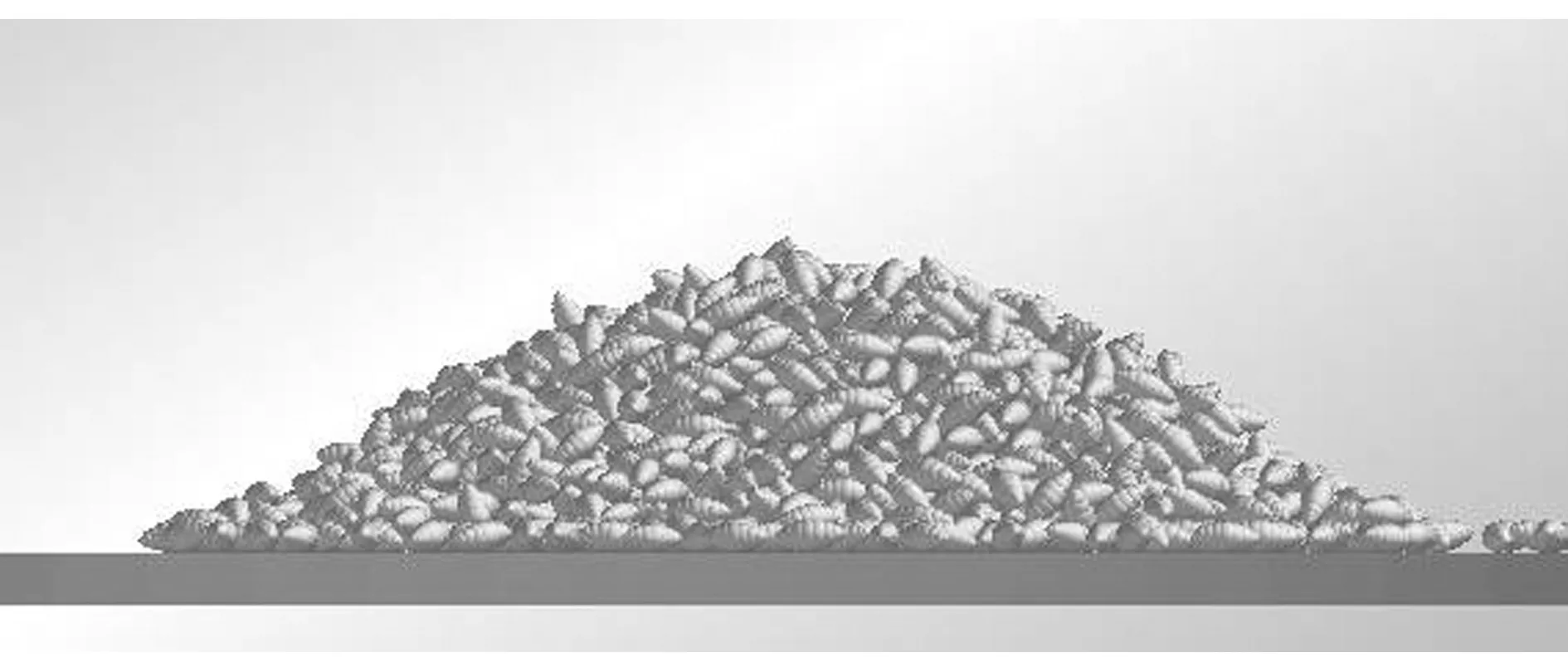
图11 九球聚合颗粒堆积仿真结果
图12 逆向建模颗粒堆积仿真结果
4.2 试验验证
选用与仿真中尺寸一致的钢制漏斗和底板,为了确保水稻粒径与仿真中的模型尺寸大致相同,挑选筛分出尺寸过大、过小的颗粒以及瘪粒。同样,选取3 000个颗粒,使得仿真数量与试验一致。试验过程中,通过万能试验机带动漏斗以0.05m/s匀速上升,重复5次试验,实际堆积结果如图13所示。各颗粒形成堆积角如表4所示。

图13 实际谷粒堆积结果
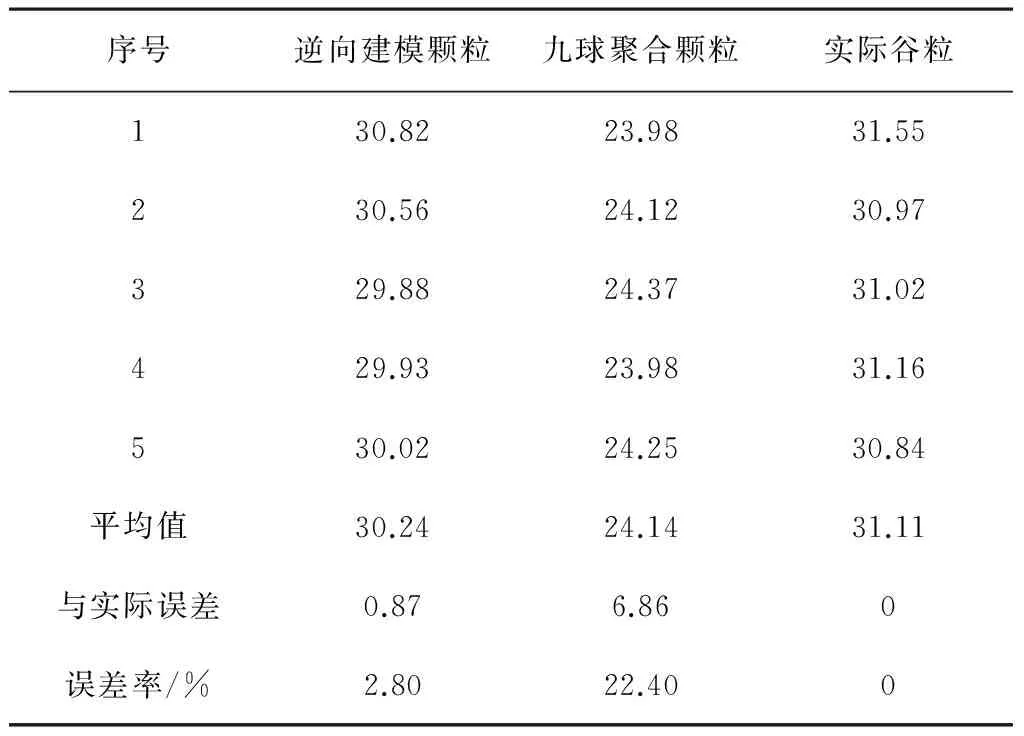
序号逆向建模颗粒九球聚合颗粒实际谷粒130.8223.9831.55230.5624.1230.97329.8824.3731.02429.9323.9831.16530.0224.2530.84平均值30.2424.1431.11与实际误差0.876.860误差率/%2.8022.400
由表4可以看出:九球聚合颗粒模型所形成堆积角平均值为24.14°,与实际谷粒堆积角误差为22.40%,不能准确地表达谷粒在介质中的运动和颗粒间的碰撞情况;而逆向建模所得的谷粒模型堆积角为30.24°,与实际谷粒堆积角较为接近,误差仅为2.80%,具有很高的准确性和实用性。
5 结论
1)基于逆向工程技术,利用曲面重构得到的水稻籽粒模型与物料原型差异较小,在外观上较简化的普通球形或椭球形颗粒更具表征性,本研究为不规则形状农业物料建模提供了一种方法。
2)通过堆积角的对比仿真及试验表明:颗粒模型对堆积角的形成有较大影响。本文基于逆向工程构建的模型的堆积角试验与实际物料堆积角试验误差小于3%,较好地反映了水稻籽粒间的接触碰撞和摩擦运动,为水稻籽粒收获清选过程中的动力学仿真分析提供了一种准确性和实用性更高的模型。
3)利用三维扫描仪对建模物体进行扫描测量可以快速、准确地获得物体表面大量点云数据,通过数据处理并利用CAD/CAM 技术,精准构建三维实体几何模型,这种建模方法具有快捷、准确、实用的特点,可以在更广泛的领域应用。
[1] 李革,赵匀.倾斜气流清选装置中物料的动力学特性、轨迹和分离研究[J].农业工程学报,2001,17(6):22-25.
[2] 赵学笃,张魁学,张振京.短茎 杆的气动 特性及 其气流中的运动 [J].农业机械学报,1982,13(2):55-65.
[3] 李 骅,尹文庆,刘 恒.4LZ-1.0 联合收割机排出物组成的测定[J].江西农业学报,2011,23(9):171-172.
[4] 李建平,赵匀.物料在振动筛面上抛起的计算机模拟和实验研究[J].农业工程学报,1997,1(34):46-48.
[5] 夏景成,蒋亦元.物料沿圆筒筛外表面运动的理论研究[J].农业机械学报,1990,2(14):53-58.
[6] 马征,李耀明,徐立章. 收获期油菜茎秆表面浸润特性研究[J].农业机械学报,2014,45(6):98-103.
[7] 李耀明,王智华,徐立章,等. 油菜脱出物振动筛分运动分析及试验研究[J].农业工程学报,2007,23(9):111-114.
[8] 马征,李耀明,徐立章. 油菜脱出物漂浮速度及摩擦与浸润特性的测定与分析[J]. 农业工程学报,2011,27(9):1317.
[9] 李耀明,董钢,徐立章. 油菜籽透筛过程的仿真实验与分析[J].农业机械学报,2007,38(9):189-191.
[10] Wu Mingliang, Tang Lun, Guan Chunyun, et al. Optimization analysis on parameters of cleaning sieve of rape combine of“Bi Lang 4LZ(Y)-1.0”[J]. Advance Journal of Food Science and Technology, 2014, 6(1):144-148.
[11] 于亚军,周海玲,付宏,等. 基于数字颗粒聚合体的玉米果穗建模方法[J].农业工程学报,2012,28(8):167-174.
[12] 石林榕,吴建民,孙伟,等. 基于离散单元法的水平圆盘式精量排种器排种仿真试验[J]. 农业工程学报,2014, 30(8): 40-48.
[13] 刘连峰. 颗粒聚合体碰撞破损的细观力学仿真研究[J].力学进展,2006,36(2):599-610.
[14] 杜欣,曾亚武,高睿,等. 基于 CT 扫描的不规则外形颗粒三维离散元建模[J].上海交通大学学报,2011,45(5):711-715.
[15] 郑文青,李俊源,姜献峰,等. 基于逆向工程技术的牙齿三维模型构建及其应用[J].轻工机械,2011,29(5):94-96.
[16] Varady T, Martin R, Cox J. Reverse engineering of geometric models-an introduction [J].Computer Aided Design,1997,29(4):255-268.
[17] 孙长库.3D 逆向工程技术[M].北京:中国计量出版社,2002:10.
[18] 李骅,尹文庆,高翔,等.基于逆向工程的谷粒三维模型的构建[J]. 西北农林科技大学学报:自然科学版,2011,39(12):201-206.
[19] 季劲松.逆向工程中三坐标测量数据处理的研究及系统开发[D].杭州:浙江大学,2002.
[20] 任建昆.基于逆向工程的复杂曲面设计技术研究 [D].杭州:沈阳航空工业学院,2009.
[21] Silbert L E, Grest G S, Landry J W. Statistics of the contact network in frictional and frictionless granular packings[J].Physical Review E Statistical Nonlinear & Soft Matter Physics, 2002, 66(6):114-129.
[22] Sun Q C. Force distribution in static granular matter in two dimensions[J]. Acta Physica Sinica, 2008, 57(8):4667-4674.
[23] Guo Z G, Chen X L, Liu H F, et al. Theoretical and experimental investigation on angle of repose of biomass-coal blends [J].Fuel, 2014, 116:131-139.
[24] 北京起重运输机械研究所.JB/T 9014.7-1999连续输送设备散粒物料堆积角的测定[S].北京:机械科学研究院,1999.
[25] Tijskens E, Ramon H, Baerdemaeker J De. Discrete element modeling for process simulation in agriculture[J]. Journal of Sound and Vibration, 2003, 266(3):493-514.
[26] Zhu H P, Zhou Z Y, Yang R Y, et al. Discrete particle simulation of particulate systems: A review of major applications and findings[J]. Chemical Engineering Science,2008, 63(23): 5728-5770.
[27] 于建群,付宏,李红,等.离散元法及其在农业机械工作部件研究与设计中的应用[J]. 农业工程学报,2005,21(5):1- 6.
[28] 李耀明,赵湛,陈进,等. 气吸振动式排种器种盘内种群运动的离散元分析[J]. 农业机械学报,2009,40(3):56-59.
[29] 孙裕晶,马成林,牛序堂,等. 基于离散元的大豆精密排种过程分析与动态模拟[J]. 农业机械学报,2006,37(11):45-48.
[30] J Farczek,A Zlobecki,J Zemanek. Assessment of angle of re-pose of granular plant material using computer image analysis[J].Journal of Food Engineering,2007,83: 17-22.
[31] 吴爱详,孙业志,刘湘平.散体动力学理论及其应用[M].北京:冶金出版社,2002.
Precise Modeling Method of Rice Based on Reverse Engineering and Test Verification
Chen Chen1,2, Wu Chongyou2, Jiang Tao2
(1.Anhui Agricultural University, Hefei 230036, China; 2.Nanjing Research Institute for Agricultural Mechanization Ministry of Agriculture, Nanjing 210014, China)
In order to reflect the motion in the medium and the collision of particles between grain and mechanism more conscientiously, precise three-dimensional model of grain is constructed using reverse engineering technique. Using a three-dimensional scanner, point cloud data of plump and blighted grains which were measured were imported in post-processing software, processed and reconstructed curve, lastly high quality three-dimensional model was got. Comparing the three-dimensional model of grain with the actual one, it shows that their size error were less than 2%. In order to further validate the accuracy of grain model with reverse engineering techniques, different models of grain which were constructed simulate the angle of repose using discrete element method. The result of simulation and field test showed that particle model has a great influence on the formation of the angle of repose. The simulation results which used modal constructed in this paper are smaller than the actual test results (3% or less). That modal better reflect the contact collision and friction between grains, which provides a more precise and practical model for the dynamic simulation of rice grain harvest.
rice; model of grain; reverse engineering technique; three-dimensional scanner; discrete element method
2016-08-17
“十二五”国家科技支撑计划项目(2013BAD08B00)
陈 晨(1992-),女,安徽芜湖人,硕士研究生,(E-mail)695419711@163.com。
吴崇友(1959-),男,辽宁岫岩人,教授,博士生导师,(E-mail)542681935@qq.com。
S126;TP391
A
1003-188X(2017)10-0046-07
