自动导航拖拉机田间作业路径规划与应用试验
2017-12-16王建波赵玉芹朱晨辉于建军张开飞王万章
王建波,赵玉芹,朱晨辉,于建军,张开飞,王万章
(1.河南农业大学 机电工程学院 / 河南粮食作物协同创新中心,郑州 450002;2.河南理工大学 万方科技学院,郑州 451400)
自动导航拖拉机田间作业路径规划与应用试验
王建波1,赵玉芹2,朱晨辉1,于建军1,张开飞1,王万章1
(1.河南农业大学 机电工程学院 / 河南粮食作物协同创新中心,郑州 450002;2.河南理工大学 万方科技学院,郑州 451400)
为了实现自动导航拖拉机田间作业的全区域覆盖路径规划,提出基于全排列算法获得转弯耗时最短的路径规划方案。为此,将农田地块划分为直线作业区域和地头转弯区域,在地头转弯区域内建立了拖拉机沿弓形和鱼尾形转弯路径行驶的轨迹解析模型,计算得到地头转弯区域所需的最小宽度及转弯所消耗的时间。在直线作业区域内,根据转弯次数最少来确定直线作业路径在田间的相对方向,生成相应的直线路径簇。根据对两块典型农田地块田间作业路径规划试验,得到了直线作业路径遍历顺序的一般规律。试验表明:这两块农田的路径规划方案中转弯路径的耗时较梭形行走、离心行走及向心行走方式至少减少了51% 。
自动导航拖拉机;路径规划;转弯路径;全排列算法
0 引言
随着农业现代化的发展,自动导航拖拉机等的智能化农业机械的应用越来越广泛,使精准农业的实现成为可能[1]。自动导航拖拉机田间作业全区域覆盖路径规划旨在减少作业覆盖的重叠和遗漏,提高作业效率和作业质量,同时便于农机装备的管理调度。有关学者已经提出了一些针对农机田间作业路径某一方面特点的路径规划方法。Stoll提出根据地块最长边将田块分割成子地块进行路径优化的方法[2]。孟志军、刘卉等[3]提出了一种面向农田作业机械的地块全区域覆盖路径优化方法,即根据不同的路径优化目标计算最优作业方向。陈济勤[4]按照不同的作业类型提出了直行、绕行及斜行的作业路径设计方法。赵春江等[5]开发了基于GIS组件的平行直线路径规划软件,并进行导航模拟。党革荣、韩冰[6]基于车辆运动学模型,设计了拖拉机在地头转弯的最佳路径。朱忠祥、宋正河等[7]针对拖拉机队列模型,根据先行拖拉机的行驶轨迹动态生成跟踪拖拉机的参考路径。
本文分析拖拉机田间作业的全区域覆盖路径规划方法,提出使用全排列算法对拖拉机行驶路径进行寻优,以充分发挥导航拖拉机的高效精准优势。
1 转弯路径的规划
农机田间作业全覆盖路径规划要求农机沿路径行驶时能够遍历农田区域内所有位置对农田或者农田作物作业,通常表现为沿作物行进行直线往返式作业[8],而在地头转弯区域调转方向,如图1所示。
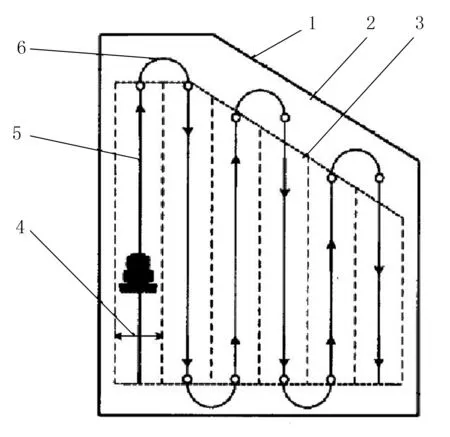
1.农田多边形 2.地头转弯区域区域 3.直线作业区域 4.作业幅宽 5.直线路径 6.转弯路径
选择后驱动轮车桥中点作为定位基准点来表示拖拉机的田间位置。导航拖拉机使用GNSS系统实现定位,并将经纬度经过高斯投影至平面直角坐标系。拖拉机轮距、轴距及转向轮的最大偏转角度决定了其最小转弯半径和转向所必要的空间。根据阿克曼转向几何原理[9]有
(1)
式中R—拖拉机转弯半径;
B—拖拉机轴距;
L—拖拉机轮距;
α—内侧转向轮偏转角。
(2)
式中R1—作业机具外侧边缘弧线半径;
e—定位基准点与作业机具的纵向距离;
D—作业机具宽度。
1.1 转弯路径的解析
根据拖拉机的最小转弯半径R与机具作业幅宽d的相对关系可知:当d≥2R时,拖拉机可以沿弓形转弯路径进入相邻直线路径;d<2R时,拖拉机需要沿鱼尾形转弯路径进入相邻直线路径。
在局部坐标系o'x'y'中表示转弯路径,如图2、图3所示。转弯路径为A→o′→B→C→D→E,由直线Ao′、BC、DE和圆弧o′B、CD平滑连接组成。点A、E所在的虚线表示农田的作业区域与地头区域的分界线,与直线作业路径的夹角为γ。当γ为锐角时,点A与点o′重合;当γ为钝角时,点D与点E重合。转弯路径曲线外侧的虚线表示拖拉机和作业机具的外侧边缘最大半径R1轨迹曲线。该轨迹与虚线AE的最大间距即地头转弯区域的最小宽度W。
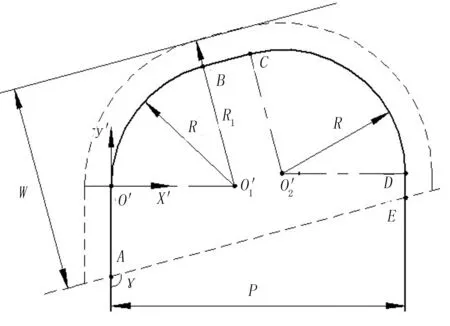
图2 弓形转弯路径
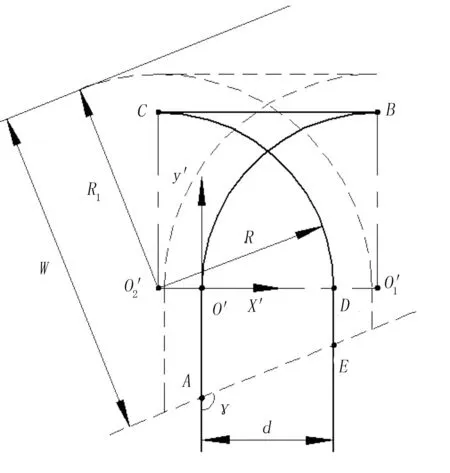
图3 弓形转弯路径
所以,地头转弯的所需的地头区域最小宽度为
(3)
1.2 转弯路径消耗时间
转弯路径所消耗的时间是选择转弯方式的依据所在。根据拖拉机不同的行驶状态(前进、倒车、停车),可以得到转弯路径消耗的时间。对于弓形转弯路径,需要在A、E点停车切换作业机具的工作状态,其所消耗时间Tturn1为
2R|cotγ|]+2·Δt
(4)
式中P—弓形转弯路径所连接的两条直线路径的间距。
对于鱼尾形转弯路径,则还需要在B、C点处停车以改变拖拉机的行驶方向,其所以所消耗时间Tturn2为
Tturn2=(πR+d|cotγ|)/V1+
(2R-d)/V2+4·Δt
(5)
2 直线路径的规划
如图1所示,直线路径端点位于地头区域与作业区域的分界线上,而相邻直线作业路径的间距即机具的作业幅宽。根据式(6)可得沿不同的作业方向时的总转弯数N,使转弯数N最小的即为最优作业方向,则有
(6)
式中Li—农田多边形的第i条边长;
m—农田多边形边数;
μi—多边形边Si与作业方向的夹角。
3 全排列算法与路径规划
在农业生产实践中,人们往往凭借经验和习惯选择农机田间作业的行驶模式,包括离心(向心)行走法、梭行法、套行法及绕行法等[10],如图4所示。
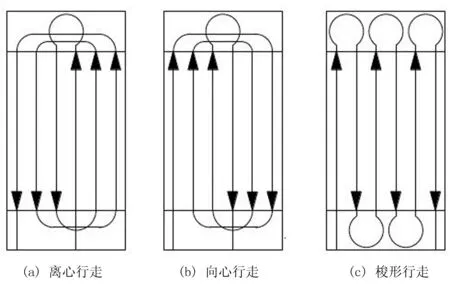
图4 拖拉机田间作业行走模式
各种行驶模式的本质在于对直线路径的遍历先后顺序不同。利用全排列算法可对所有可能的遍历顺序进行分析,然后根据转弯路径消耗的时间最少确定直线作业路径的作业顺序,同时确定相应的转弯方式。
排列作为穷举组合目标的一种最基本的运算形式,在科学和工程技术中应用广泛。全排列的递归算法是递归算法的典型应用,具有递归算法的全部优点[11]。记集合R={r0,r1,r2, …,rn-1},perm(R)表示集合R的全排列。记集合P={p0,p1,p2, …,pn-2,pn-1},P为直线作业路径任意一种排列情况,即P∈perm(R)。
转弯路径的起点和终点必然是编号均为偶数或者奇数的直线路径的端点。设集合Q={q0,q1,…,qk,…,q2n-2,q2n-1},表示对直线作业路径端点的遍历顺序。其中,q0表示拖拉机作业的起点,且q0=2·p0或者q0=2·p0+1。根据集合P所确定的对直线路径的遍历顺序,则可以得到对直线作业路径端点的遍历顺序。
4 路径规划与数据处理
采用所述的路径规划方法,对河南粮食作物协同创新中心长葛现代农业试验区的两块农田的玉米播种作业进行了田间作业路径规划。拖拉机采用东方红LX1204轮式拖拉机,作业机具为四行玉米免耕施肥播种机。经测算,拖拉机作业状态行驶速度为1.5m/s,非作业状态前进速度为0.8m/s,倒车速度为0.4m/s。拖拉机最小转弯半径为5m,播种机作业幅宽为2.4m,播种机外侧边缘轨迹半径为7m。使用UniStrong®G970 GNSS RTK采集试验田边界位置,并以E113°为中央子午线进行高斯投影正算以获取农田边界的平面坐标。根据式(6)可得拖拉机在试验田中的作业方向与转弯数N的关系曲线,如图5所示。
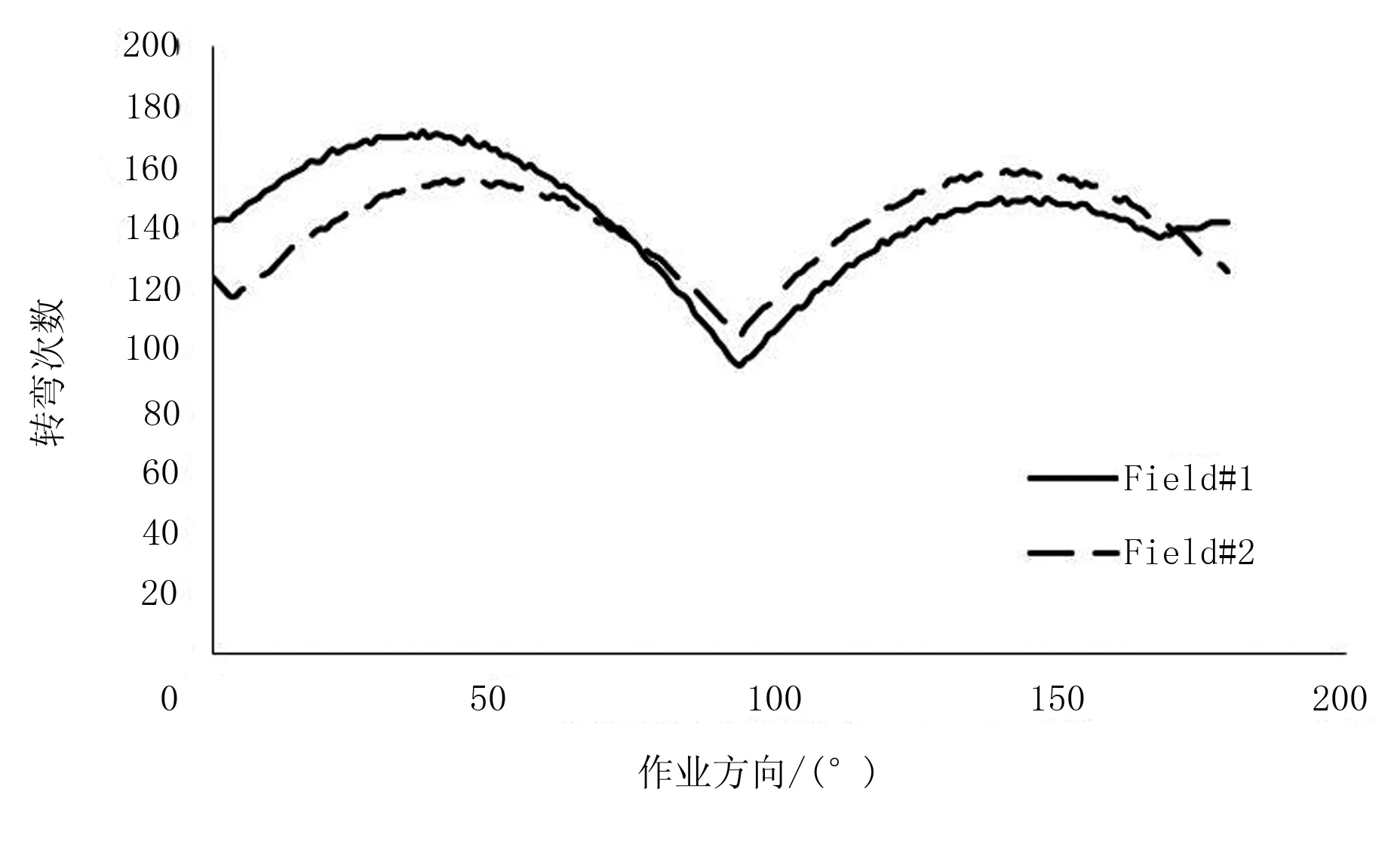
图5 作业方向与转弯次数关系曲线
当ω=93°时,拖拉机在#1、#2试验田的转弯次数最少,分别为95、105次。试验田及直线路径的示意图如图6所示。
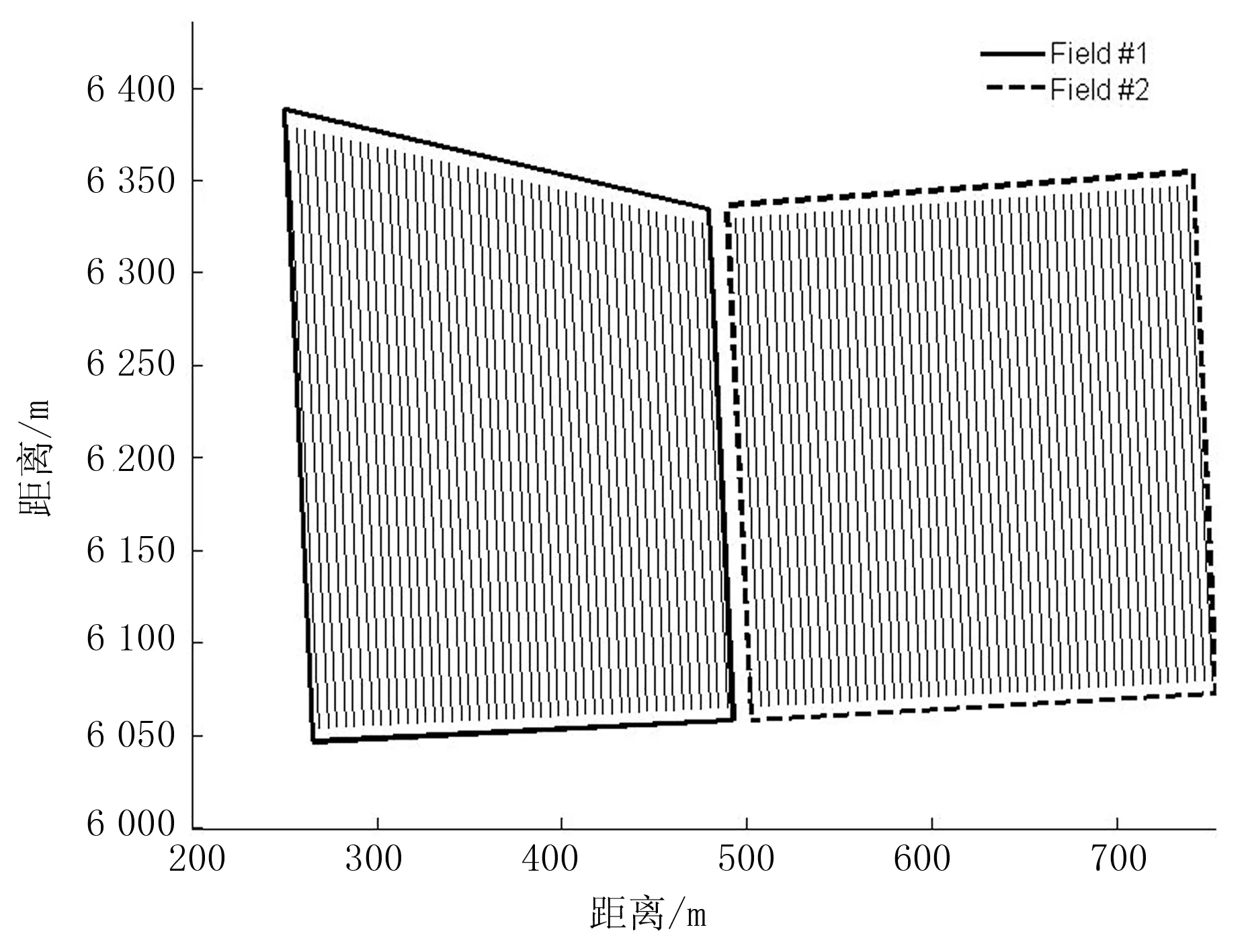
图6 试验田及作业直线作业路径示意图
根据全排列递归算法得到试验田的直线路径端点的遍历顺序,并基于部分直线路径的全排列对其遍历顺序的规律进行了总结与归纳,如表1所示。图7所示为两块试验田的路径规划方案转弯路径消耗的时间统计。转弯路径所用的时间分别较梭形行走、离心行走以及向心行走方式减少了51.5、211.1、210、63.6、202.8、276.3min,下降比例达到51%~82%。
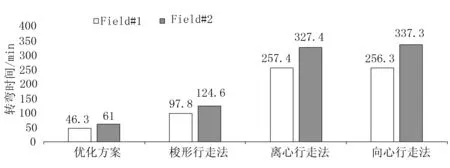
图7 转弯路径耗时统计
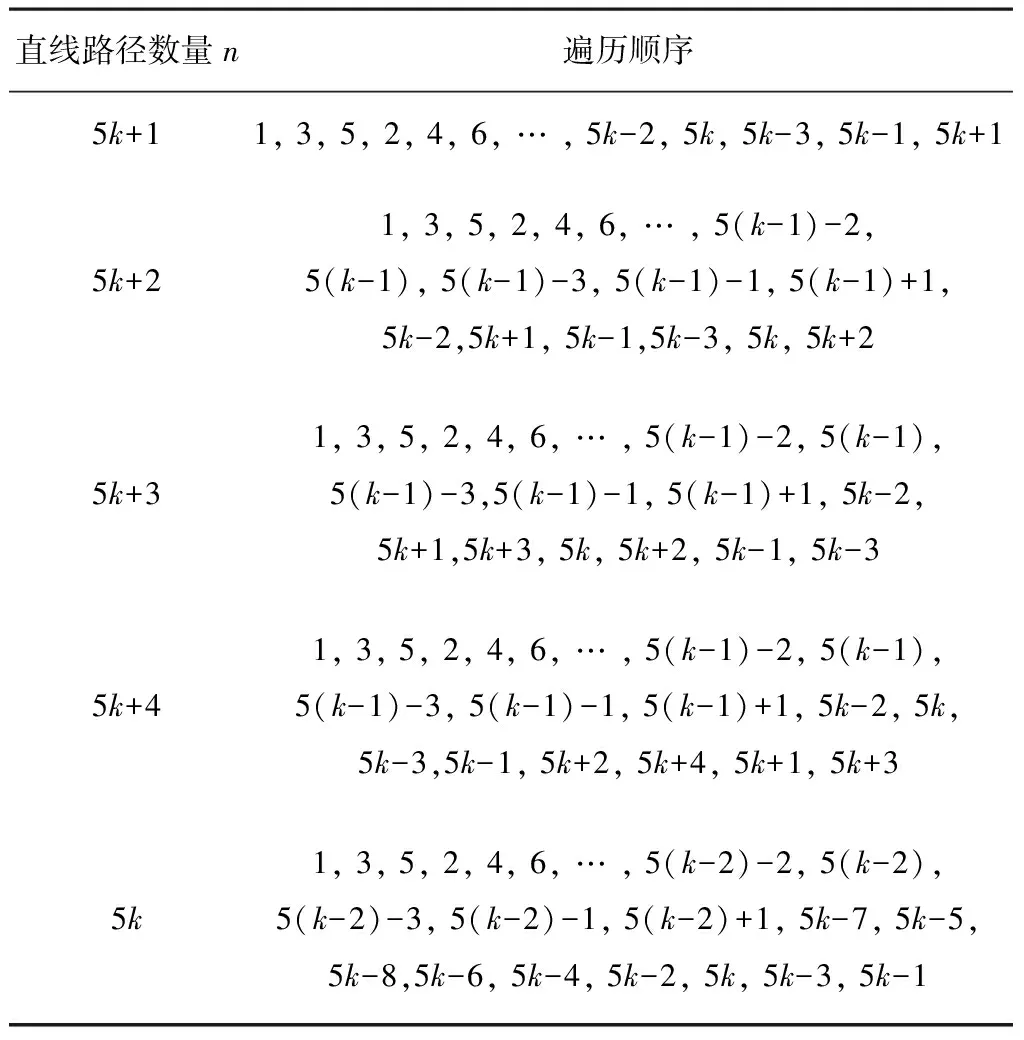
直线路径数量n遍历顺序5k+11,3,5,2,4,6,…,5k-2,5k,5k-3,5k-1,5k+15k+21,3,5,2,4,6,…,5(k-1)-2,5(k-1),5(k-1)-3,5(k-1)-1,5(k-1)+1,5k-2,5k+1,5k-1,5k-3,5k,5k+25k+31,3,5,2,4,6,…,5(k-1)-2,5(k-1),5(k-1)-3,5(k-1)-1,5(k-1)+1,5k-2,5k+1,5k+3,5k,5k+2,5k-1,5k-35k+41,3,5,2,4,6,…,5(k-1)-2,5(k-1),5(k-1)-3,5(k-1)-1,5(k-1)+1,5k-2,5k,5k-3,5k-1,5k+2,5k+4,5k+1,5k+35k1,3,5,2,4,6,…,5(k-2)-2,5(k-2),5(k-2)-3,5(k-2)-1,5(k-2)+1,5k-7,5k-5,5k-8,5k-6,5k-4,5k-2,5k,5k-3,5k-1
k为整数,且k>2。
5 结论与讨论
根据转弯路径确定的拖拉机所占空间,可以将农田划分为直线作业区域和地头转弯区域。对于前者,以转弯次数最少确定直线路径的农田中的相对方向;对于后者,以转弯路径耗时最短确定对直线路径的遍历顺序及相应的转弯方式。路径规划试验表明:两块农田的路径规划方案的转弯路径耗时较梭形行走、离心行走及向心行走方式下降比例为51%~82%,达到了减少非作业状态所占时间及提高作业效率的目的。对有限数量的直线路径的分析,得到了其最优遍历顺序的一般规律,有利于提高路径规划方法的可操作性。实际应用时,应在路径规划软件系统中预设直线路径遍历顺序规律,避免直接采用全排列算法。
[1] 罗锡文,张泰岭,洪添胜.“精细农业”技术体系及其应用[J].农业机械学报,2001,32(2):103-106.
[2] Stall A,Automatic operation planning for GPS—guided machinery[C]//Proceedings of 4th European Conference on Precision Agriculture.Berlin:Germany,2003:657-664.
[3] 孟志军,刘卉,王华,等.农田作业机械路径优化方法[J].农业机械学报,2012,43(6):147-152.
[4] 陈济勤.农业机器运用管理学[M].北京: 中国农业出版社,1999.
[5] Zhao Chunjiang,Meng Zhijun,Wang Xiu.Development of an object-oriented program for variable rate application performance testing[C]//2004 CIGR International Conference.Beijing:CSAE,2004.
[6] 党革荣,韩冰.拖拉机地头转弯的最佳路径研究[J].西北农林科技大学学报:自然科学版,2006,34(10):202-204.
[7] 朱忠祥,宋正河,谢斌,等.拖拉机队列自动控制系统[J].农业机械学报,2009,40(8):149-154.
[8] 刘向锋.面向GPS导航拖拉机的最优全局覆盖路径规划研究[D].沈阳:辽宁工程技术大学,2011.
[9] 王海涛, 陈哲明.汽车转向机构仿真及优化设计[J].计算机仿真,2013,30(3):162-165,200.
[10] 侯江丽.基于GIS的拖拉机自动驾驶作业路径规划方法的研究[D].北京:中国农业大学,2006.
[11] 吴素萍.全排列递归算法在算法教学中的重 要性[J].现代计算机:专业版,2008(12):119-120.
Field-work Path Planning for Tractor with Automatic Navigation and Practical Application
Wang Jianbo1, Zhao Yuqin2, Zhu Chenhui1, Yu Jianjun1, Zhang Kaifei1, Wang Wanzhang1
(1.Mechanical and Electrical Engineering College, Henan Agricultural University /Collaborative Innovation Center of Henan Grain Crops, Zhengzhou 450002, China; 2. Wanfang College of Science & Technology, Henan Polytechnic University, Zhengzhou 451400, China)
In order to plan the field-work full area coverage path for tractor with automatic navigation, a method was put forward that full permutation algorithm is used to obtain the path planning scheme consuming the least time. The cropland is divided into the working area and the headland area. The corresponding moving trajectories of the tractor’s locating datum point are analyzed when it runs along the bow-shaped and fish tail-shaped turning paths. And both the minimum width of the headland area and the consumption of time required to complete turning are calculated. The relative direction of the working path in a given filed is optimized to make the turning times least, and then a cluster of working path lines parallel to the relative direction could be generated. According to the path planning test result of 2 typical farmlands, the general rule of working paths’ traversal order has been acquired. And the test data showed that compared with spindle-shaped, centrifugal and centripetal driving mode, turning paths of the path planning scheme in the 2 croplands reduced time by 51% at least.
tractor with automatic navigation; path planning; turning path; full permutation algorithm
2016-01-25
河南省高等学校重点科研项目(15A210038); 河南省现代农业产业技术体系(S2010-02-G07)
王建波(1989-),男,河南安阳人,硕士,(E-mail)jianbo_2013@foxmail.com。
王万章(1963-),男,河南孟津人,教授,博士生导师,(E-mail)wangwz@126.com。
S232
A
1003-188X(2017)02-0242-04
