基于GSM嵌入式物流监控的农业自主导航车辆设计
2017-12-16邓明华
邓明华
(武汉工商学院 信息工程学院,武汉 430065)
基于GSM嵌入式物流监控的农业自主导航车辆设计
邓明华
(武汉工商学院 信息工程学院,武汉 430065)
为提高农用车辆视觉导航系统对不同环境的适应性,基于GSM无线通信和嵌入式系统,提出了一种新的农业运输车辆自主导航的物流监控系统设计方法,并研究了其对路径的识别能力。该系统对环境的适应能力较强,可以快速、准确地提取导航路径的特征,并具有物流跟踪监控功能,可以实现农用运输车辆在特定的田垄里进行自主换向,提高了车辆的自主导航能力。利用GSM无线通信导航技术对驾驶员实际输出转角进行追踪测试,结果表明:驾驶员的目标曲线和转角无线控制实测曲线比较吻合,从而验证了基于GSM通信的嵌入式物流系统在农业运输车上实现自主导航的可行性和可靠性。
农用车辆;路径识别;物流监控;视觉导航;GSM通信;嵌入式
0 引言
随着传感器性价比的不断提高,以机器视觉和卫星定位为核心的农用车辆自动导航系统已成为研究热点。机器视觉系统的主要作用是对路线进行识别,对行驶过程中遇到的障碍物进行检测,起到农业车辆的相对定位作用。机器视觉的工作性能优异,在路径识别过程中,还可以有效地区分杂草和农作物,检测病虫害,具有广泛的适应性,因此在导航系统中是设计的关键部件之一。当遇到复杂情况时,传输信号会存在较多的干扰,为了接收到高质量的控制信号,提出了一种基于卡尔曼滤波的GSM通信的自主导航运输车系统,通过路径识别方法的改进,提高了农业车辆对环境适应性和鲁棒性,提高了农业生产效率。
1 农用车辆视觉导航系统
在传统的导航农业运输车辆在进行设计时,一般采用视觉导航的形式,利用对田间图像的采集和处理,得到车辆形式的航向控制偏角。为了提高农业运输车辆自主导航的性能,本次研究构建了一种基于无线通信网络数据传输的嵌入式物流监控系统,该系统可以对车辆的转向问题进行合理的调度,从而实现了转向的自动化控制功能,其总体结构如图1所示。
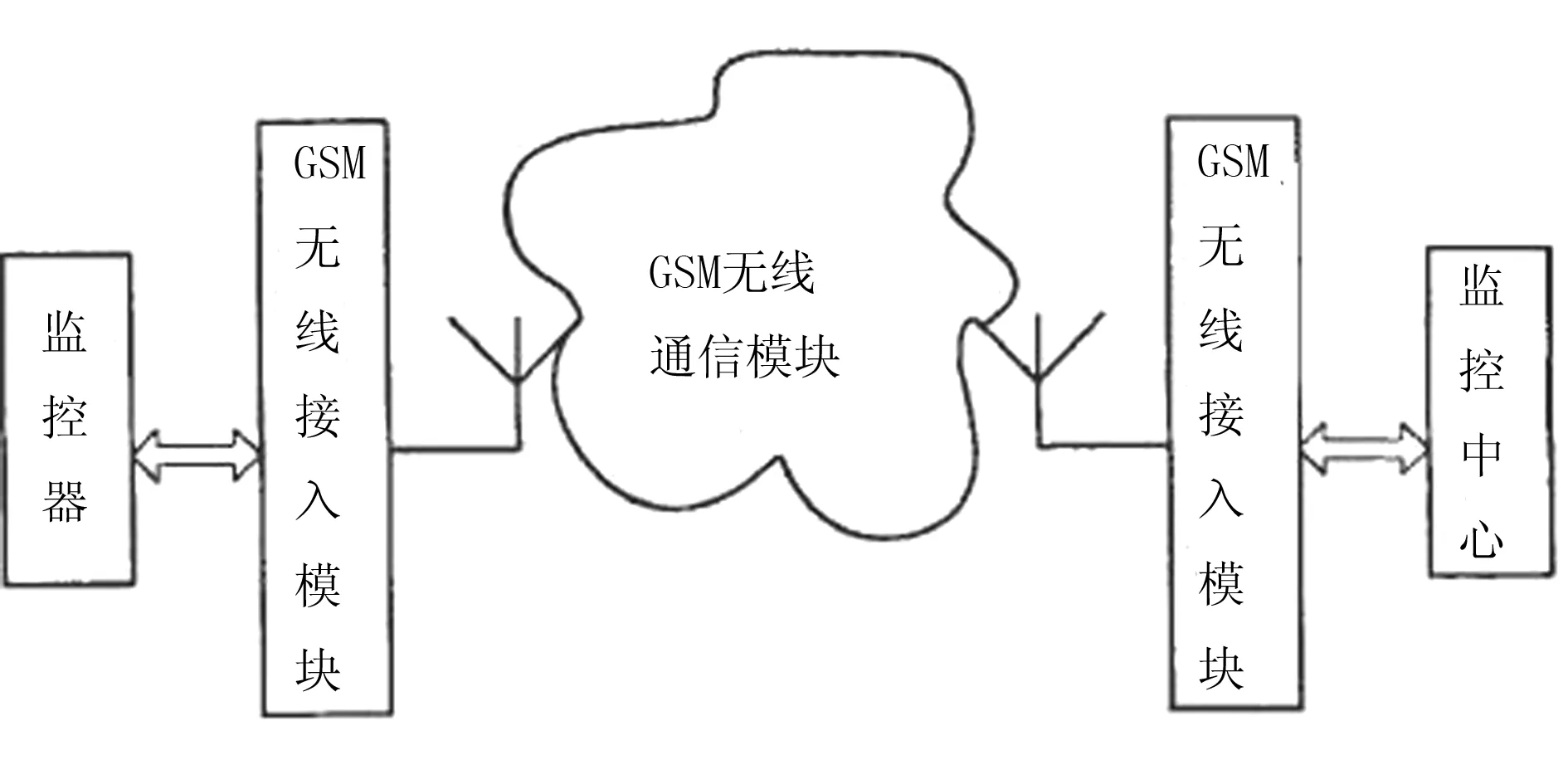
图1 系统整体结构图
图1中,监控器可以安置在作业区的监控中心,负责完成车辆物流信息的采集,无线通信GSM网络将采集得到的物流信息传输给监控中心,并利用MCU处理器对数据信息进行处理,其硬件结构如图2所示。

图2 农业运输车辆视觉通信系统示意图
工作时,采集到的数据通过GSM网络存储到数据服务器,服务器的MCU处理器对数据进行处理,并对在需要转向调度的位置进行物流跟踪标记,提高了转向系统的控制精度。
2 基于GSM通信的自主转向机构设计
农业运输车辆在田垄里进行运输作业时,当遇到障碍物或者农作物时,为了降低车辆碰撞损失,使其对农作物产生较小的伤害,需要在特定的位置进行转向。为了提高转向控制机构的灵敏度,使用电液压转向系统,其机械结构如图3所示。
为了提高运输车辆转向执行机构的自动化程度,加装了比例控制电磁阀,并对油路进行了修改,建立了一种电液控制的转向机构。同时,在原来油路的基础上并联了电控制转向器,可以实现信号的接收和自动转向功能,其结构如图4所示。
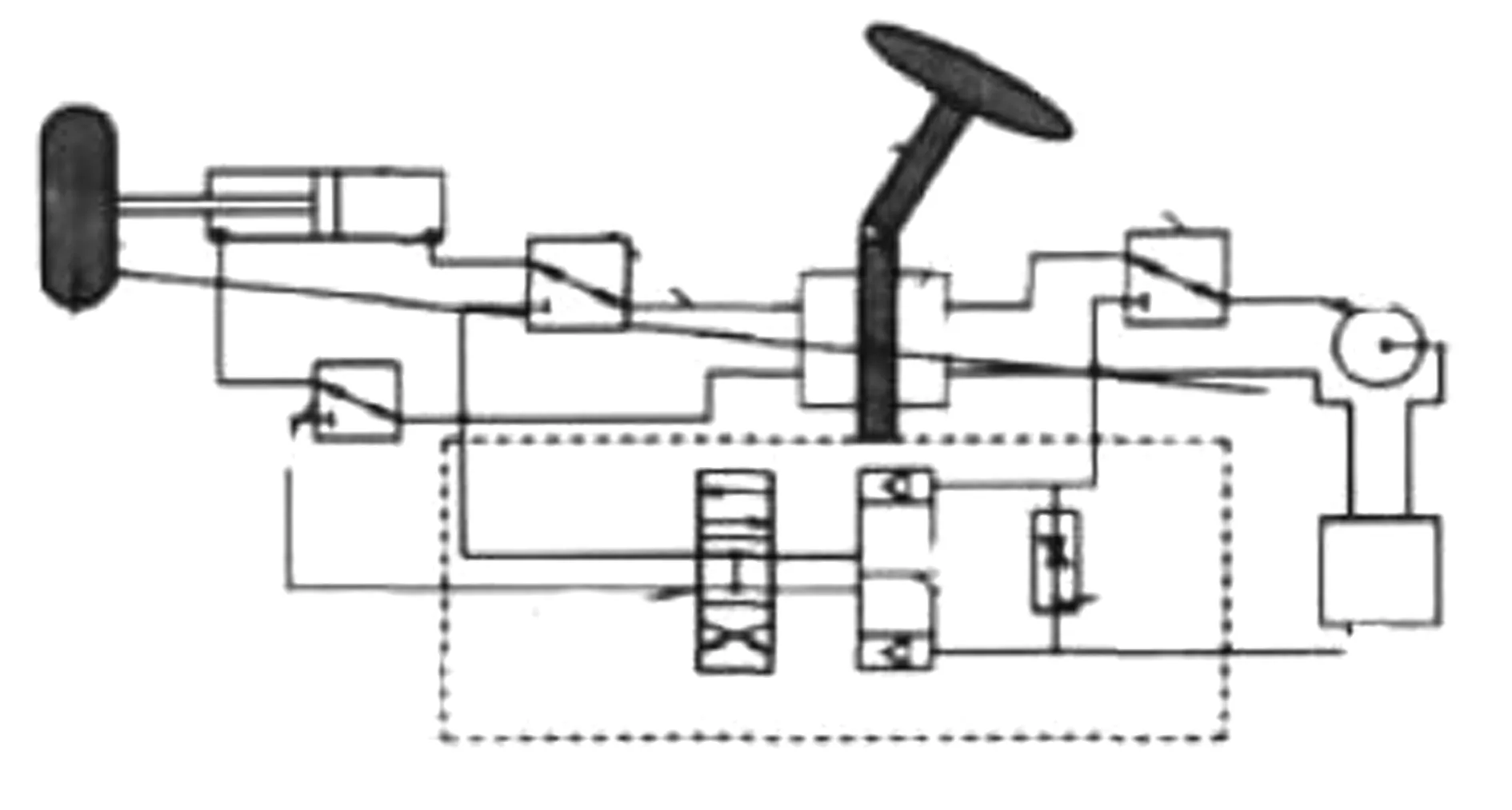
图4 改进后的电控液压转向执行机构
改进后的电控制转向器可以根据MCU发出的指令进行自主换向,利用嵌入式物流监控系统进行调度管理,实现农用车辆的路线最优化。该转向器利用电液控制阀,将原来的手动控制方向盘,利用液压电磁机构改为电控制形式,其结构如图5所示。
该结构在不改变原来转向机构的情况下,实现了自动转向功能,其安装简单、实用性较强。在转向自动化控制过程中,转向系统需具有通话、短信及GPS数据功能,要对调度信息进行显示和播报,因此需要借助GSM无线通信装置。
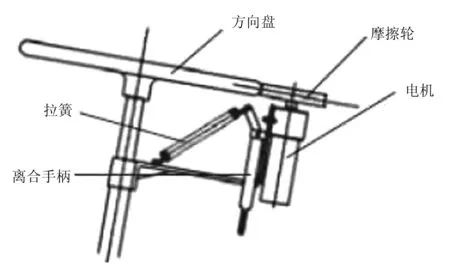
图5 自动转向执行机构
图6为GSM车载通信设备示意图。车载通信设备是车辆信息的控制中心,是调度指令的执行者,主要包括GPS天线、GSM通信天线和主机等,可以对车辆的位置进行报告,对车辆实现监控和调度指挥。

图6 GSM无线通信装置
图7表示车辆转向调度管理的控制串口。根据车辆的实际运行情况,在物流主监控室可以通过车载设备对车辆发出调度指令,转向调度指令在显示器上进行显示,也可以通过语音功能进行显示或者回复。
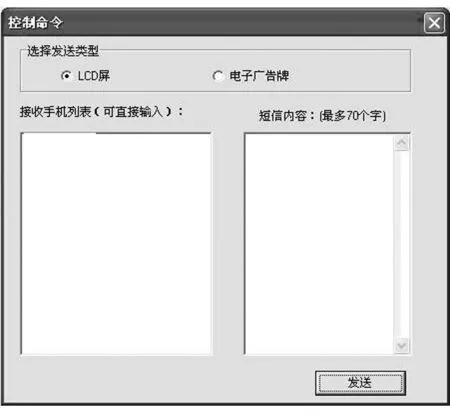
图7 车辆调度管理
在农用运输车辆进行转向调度管理时,为了提高信号的传输质量、消除信号之间的码间串扰问题,需要对GSM通信信号进行滤波处理,滤波器可以选用嵌入式滤波。假设GSM单列信号系列为(t),则滤波器的输入信号可以写成
(1)
其中,ak为第k个转向调度信号;Ts为信号周期。信号响应模型的表达式为
(2)
其中,nR(t)为滤波后产生的输出噪声;h(t)为H(w)的傅里叶反变换。
(3)
监控中心系统的MCU对y(t)信号进行判别,以确定数字信息序列{ak}。假设信号的时延为t0,在t=t0+jTs瞬间对y(t)抽样判别,则
(4)
当j=k时,有
nR(t0+jTs)
(5)
其中,ajh(t0)是输出调度信号的第j个转向调度信息在抽样瞬间t=t0+jTs所取的值,利用其判断对码间信号的干扰。为了降低干扰造成的影响,在信号处理过程中引入了Kalman滤波算法,其离散控制系统为线性随机微分方程,则
X(k)=A·X(k-1)+B·U(k)+W(k)
(6)
其中,Xk为k时刻的调度系统的反应状态;A和B为系统参数;U(k)为k时刻对应的控制变量。
(7)
再加上系统的测量值,则
Z(k)=H·X+V(k)
(8)
其中,Zk为k时刻的测量值;H为测量系统的参数;W(k)和V(k)分别为两种噪声,这两种噪声分别是过程噪声和测量噪声。利用调度系统信号的模型可以预测下一个状体的系统。假设当期信号调度值为k,则根据调度系统可以预测下一个调度信号为

(9)

3 嵌入式GSM农业自主导航车辆性能测试
在普通的农业运输车辆上装载了摄像机、GSM信号接收器和传感器,通过转向物流调度系统,对自主导航农业运输车辆的自主导航和转向性能进行测试,所使用的样机如图8所示。

图8 测试样机
测试时,首先利用机器视觉系统对垄田的图像进行采集,利用摄像机得到的原始图像如图9所示。

图9 原始图像
图像需要经过数字化处理才能得到农业运输车的导航路线,路径标记使用Hough算法进行计算,通过计算得到了如图10所示的农业运输车辆导航路径结果图。
从转向调度的实验样板中随机取出718个样本,样本每次输出的时间为0.003ms,通过转向调度系统的测试,得到了控制器输出和样本目标值曲线,如图11所示。
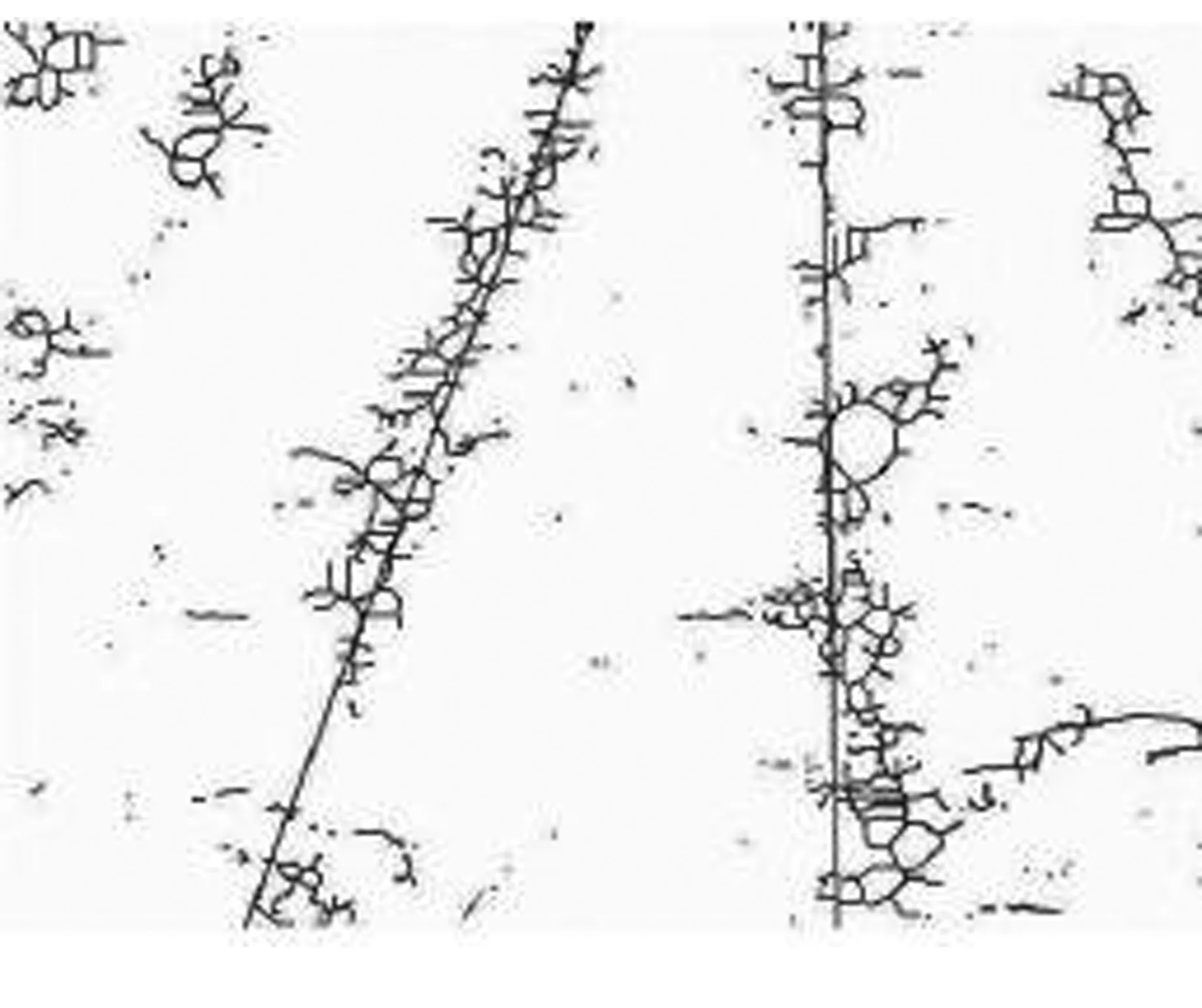
图10 路径标记后图像
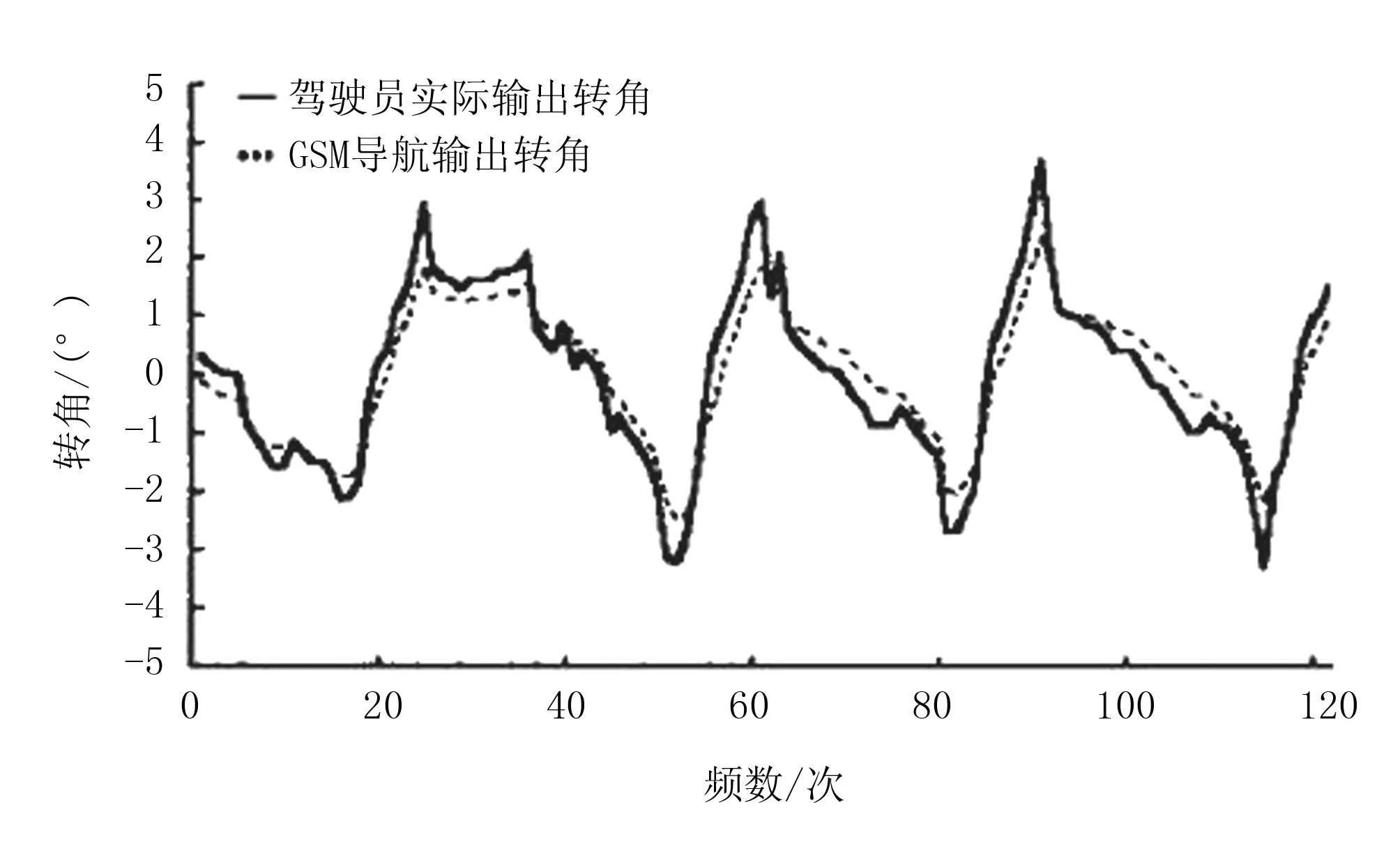
图11 基于GSM通信的转角输出跟踪结果
由图11可以看出:利用GSM无线通信导航技术对驾驶员实际输出转角进行跟踪,可以得到非常接近的转角曲线,从而验证了基于GSM通信的嵌入式物流系统在农业运输车上实现自主导航的可行性。
4 结论
1)基于GSM无线通信和嵌入式系统,利用物流监控设计了一种新的农用车辆转向调节的自主导航控制系统。该系统对环境的适应性较好,具有远程控制和物流跟踪等功能,对环境的适应性较好,可以实现农业运输车辆的自主换向,从而大大提高了农业车辆的自主导航能力。
2)通过对自主导航农业车辆进行性能测试,并对驾驶员实际输出转角进行追踪测试后的测试结果可以看出:驾驶员的目标曲线和转角无线控制实测曲线比较吻合,从而验证了农业车辆自主换向调度和自主导航系统的可靠性。
[1] 介战.我国谷物随机损失率测试展望[J].农机化研究,2009,31(7):5-9.
[2] 周利明,张小超,刘阳春,等.联合收获机谷物损失测量 PVDF 阵列传感器设计与试验[J].农业机械学报,2010,41(6):167-171.
[3] 李俊峰,介战.联合收割机谷物损失测试研究探讨[J].农机化研究,2007(12):248-250.
[4] 梁振伟,李耀明,赵湛,等.切纵流联合收获机夹带损失监测方法[J]. 农业工程学报,2012,28(S2): 179-183.
[5] 李耀明,梁振伟,赵湛,等.联合收获机谷物损失实时监测系统研究[J]. 农业机械学报,2011,42(S1):99-102.
[6] 徐立章,李耀明,李洪昌,等.纵轴流脱粒分离-清选试验台设计[J].农业机械学报,2009,40(12):76-79.
[7] 唐忠,李耀明,赵湛,等.夹带损失传感器不同安装位置对籽粒检测精度的影响[J].农业工程学报,2012, 28(10):46-52.
[8] 解福祥,区颖刚,刘庆庭.甘蔗收获机组合式扶起装置设计与试验[J].农业机械学报,2011,42(2): 94-97.
[9] 赖晓, 李尚平,秦志文,等.新型甘蔗收割装置的仿真分析与试验研究[J].农机化研究,2011,33(2):102- 105.
[10] 王健康,吴明亮,任述光,等.往复式切割器传动机构运动动力学分析[J].中国农学通报,2011,27(1):190-194.
[11] 李婉,李尚平,刘东美.小型整秆甘蔗收获机械喂入机构仿真分析与试验研究[J].农机化研究,2010,32(7):152-154.
[12] Takuyuki Y, Katsuaki S, Koki I, et al. Application of a Sugarcane Harvester for Harvesting of Willow Trees Aimed at Short Rotation Forestry: an Experimental Case Study in Japan[J].Croatian Journal of Forest Engineering, 2012,33(1):5-14.
[13] 宋春华,区颖刚,刘庆庭,等.两段式螺旋扶起机构理论的研究[J].农机化研究,2010,32(11): 34-36.
[14] 杜现军,李玉道,颜世涛,等.棉秆力学性能试验[J].农业机械学报,2011,42(4):87-91.
[15] 宋占华,肖静,张世福,等.曲柄连杆式棉秆切割试验台设计与试验[J].农业机械学报,2011,42(11):162- 167.
[16] 王锋德,燕晓辉,董世平,等.我国棉花秸秆收获装备及收储运技术路线分析[J].农机化研究,2009, 31(12):217-220.
[17] 李耀明,秦同娣,陈进,等.玉米茎秆往复切割力学特性试验与分析[J].农业工程学报,2011,27(1):160- 164.
[18] 赵湛,李耀明,徐立章,等.超级稻单茎秆切割力学性能试验[J].农业机械学报,2010,41(10):72-75.
[19] 刘修骥.大幅度减少液压功率的双半径液压转向的研究[J].兵工学报,2012,18(1):24-28.
[20] 张道林,刁培松,董锋,等.拨禾指式不对行玉米收获装置的试验[J].农业工程学报,2010,26(5):103-106.
[21] 王岳,曹扬,夏晓东,等.双季稻区收获农艺及先进适用联合收割机型谱[J].农业工程学报,2002,18(2):68-71.
[18] 李文见,姬江涛.轮履复合式农业机器人越避障控制研究[J].河南科技大学学报:自然科学版,2007(8):57-59.
[19] 王仲民,戈新良,唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报,2003,32(2):30-35.
[20] 国刚,王毅.应用BP神经网络进行手写体字母数字识别[J].人工智能及识别技术,2008(6):1459-1460.
[21] 施少敏,马彦恒,陈建泗.基于BP神经网络的数字识别方法[J].兵工自动化, 2006,25(10): 40-41.
[22] 许颖泉.用神经网络进行数字图像识别研究[J].应用科技,2008(12):59-60.
[23] 梁喜凤,杨犇,王永维.番茄收获机械手轨迹跟踪模糊控制仿真与试验[J].农业工程学报,2013,29(17):16-22.
[24] 张建锋,何东健,张志勇.采摘机器人自适应鲁棒跟踪控制算法设计[J].农机化研究,2009,31(12):10-14.
[25] 刘继展,李萍萍,李智国.番茄采摘机器人末端执行器的硬件设计[J].农业机械学报,2008,39(3):109-112.
Design of Agricultural Autonomous Navigation Vehicle Based on GSM and Embedded Logistics Monitoring System
Deng Minghua
(School of Information Engineering,Wuhan Technology and Business University,Wuhan 430065, China)
In order to improve the adaptability of the vision navigation system for the agricultural vehicles, the design method of the logistics monitoring system is proposed based on GSM wireless communication and embedded system. The system on the environment of good adaptability, can quickly and accurately extract the navigation path feature, and it has a logistics tracking monitoring function, which can realize agricultural transport vehicles, in particular furrows self-reversing,and improve the vehicle autonomous navigation capabilities. GSM wireless communication navigation technology is used to track the actual output angle of the driver. The test results can be seen that the driver's target curve and the angle of the measured curve is consistent. It validates the feasibility and reliability of the embedded logistics system based on GSM communication in the agricultural transport vehicle.
agricultural vehicles; path identification; logistics monitoring; visual navigation; GSM communication; embedded
2016-01-18
现代物流与商务湖北省协同创新中心项目(2011A201313)
邓明华(1981-),女,湖北恩施人,讲师,硕士,(E-mail)dmh1981@qq.com。
S24;TP391.41
A
1003-188X(2017)02-0237-05
