联合收割机最短路径设计——基于禁忌搜索和PID算法的
2017-12-16张晓云王丽娟
张晓云,王丽娟,熊 琼
(1.绵阳职业技术学院,四川 绵阳 621000;2.焦作师范高等专科学校a.计算机与信息工程学院;b.计算机应用技术研究所,河南 焦作 454000;3.武汉工商学院 信息工程学院,武汉 430065)
联合收割机最短路径设计
——基于禁忌搜索和PID算法的
张晓云1,王丽娟2a,2b,熊 琼3
(1.绵阳职业技术学院,四川 绵阳 621000;2.焦作师范高等专科学校a.计算机与信息工程学院;b.计算机应用技术研究所,河南 焦作 454000;3.武汉工商学院 信息工程学院,武汉 430065)
为了提高联合收割机的收割效率和自动化作业能力,使其在复杂地块具有智能路径规划功能,提高收割机作业的自适应能力,提出了一种基于禁忌搜索的智能联合收割机自动路径规划优化方案,并采用PID反馈调节控制算法,来降低算法的误差;建立了联合收割机智能搜索的禁忌算法模型,并设计了积分、微分和比例调节的PID控制模型;最后利用实地和软件测试的方法对算法的可行性和可靠性进行了测试。结果表明:利用禁忌搜索的PID控制算法可以有效地缩短路径规划时间,提高算法的精度,从而验证了算法在收割机智能控制上应用的可行性。
联合收割机;路径规划;自适应;禁忌搜索;PID算法
0 引言
随着现代农业技术的发展,迫切的要求联合收割机具有较高的收割效率和较好的自动化作业能力。由于人工智能技术的进一步发展,计算机技术和控制理论技术的联系越来越密切,近几年来研究的一些控制系统可以自动地对路径最优问题进行求解,并且利用智能算法来优化作业目标的搜索问题。禁忌搜索算法是路径规划和调度的一种较好的方法,而PID控制算法可以利用负反馈调节的方法实现控制系统的优化。本文结合禁忌搜索算法控制系统的基本原理,使用实验测试和软件仿真等方法对联合收割机的智能路径规划功能进行了深入研究,对于现代联合收割机控制系统的开发具有一定的现实意义。
1 联合收割机搜索算法和路径规划
联合收割机路径的优化是对一系列的收割目标点进行优化的过程,确定合适的路径,使收割机以最快的速度对目标点进行收割,是路径搜索算法首先需要解决的问题。路径规划问题如图1所示。收割机的路径规划问题可以描述为有一定数量的收割目标,每个目标的收割量不同,目标的位置和收割量是确定的,由一个收割机车队负责收割任务,每个收割机的作业量和到达距离是一定的,通过路径规划可以使收割路径最短,同时满足要求条件。禁忌搜索算法是一种全局搜索算法,该方法通过求解一个初始解,然后在邻域中搜索最佳解或者移动到较差区域搜索最佳解,并对搜索的路径进行记录,在下次搜索时禁忌表中的目标点。流程如图2所示。
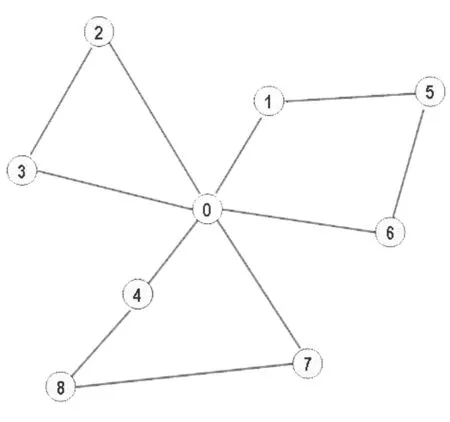
图1 收割机路径规划问题
禁忌搜索算法的规划流程主要根据禁忌属性,对最优解不断更新,从而得到最优路径。首先利用启发算法得到初始解,然后对初始解进行禁忌搜索。其具体步骤如下:
1)利用直接排列解。首先,构建路径优化的初始解,随机生成不重要的路径;然后,按照约束条件,依次将解送入优化路径中,从而产生路径的初始化解;最后,通过求解目标函数,得到路径的总和。
2)对两个路径的收割量进行随机交换领域解,将n(n-1)/2个客户进行排列,然后按照约束提交,重新计算目标函数。
3)通过对领域解的评价来更新禁忌表。如果候选的目标解比当前的最优解更优,则将该解确定为当前解;否则,判断该解是否被禁忌,更新禁忌表。
4)如果候选解都被禁忌,则计算结束。
5)选出合适的路径优化方案。
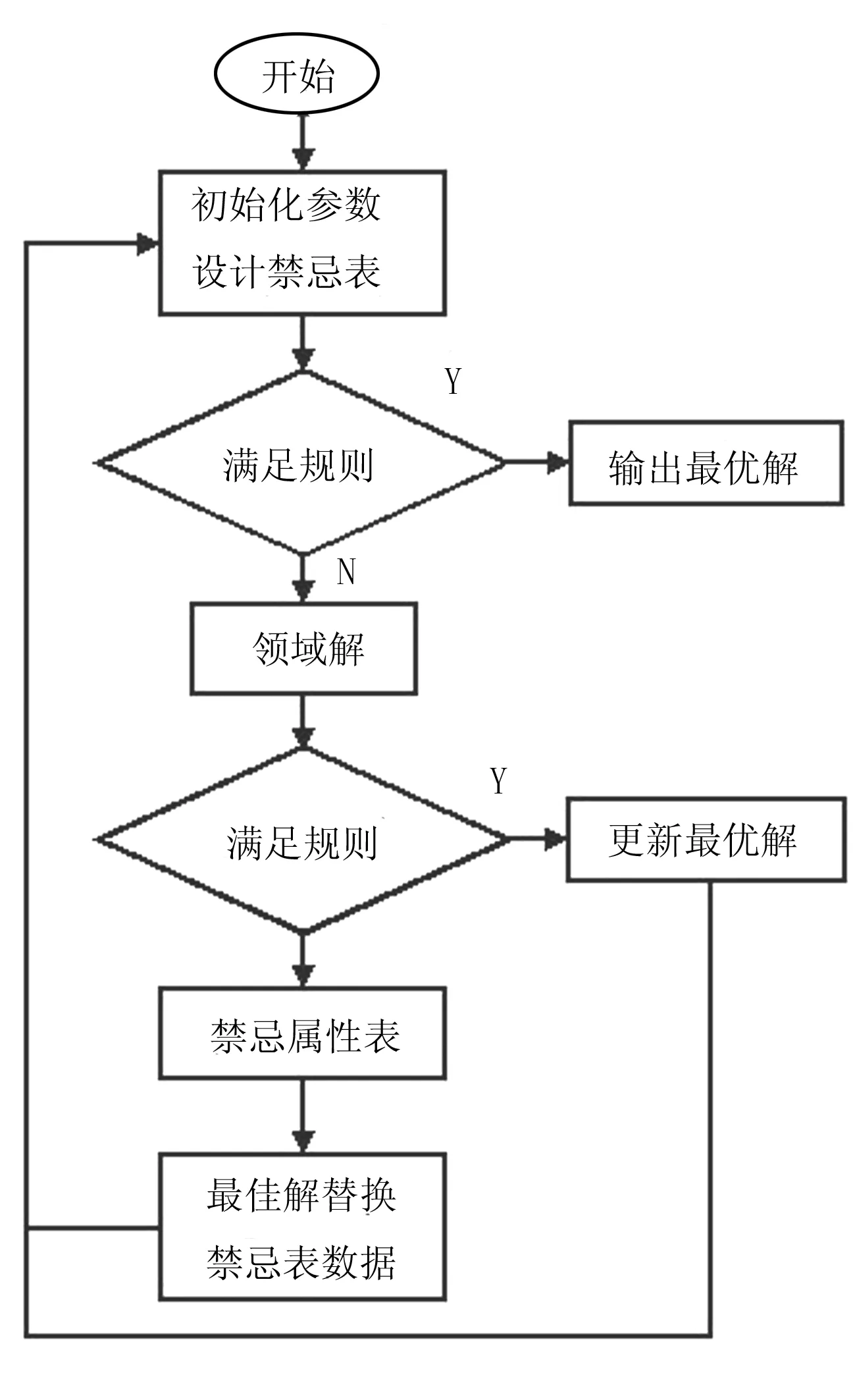
图2 禁忌搜索路径规划流程
2 基于PID控制算法的自动控制系统优化
PID控制算法是自动控制系统最常用的控制算法之一,在系统中增加PID校正器后,可以通过微分方程的调节、零点和极点的调节来改善系统的性能,包括比例调节、比例微分调节、积分调节和比例微分积分调节。采用比例调节的传递函数为
Gc(s)=Kp
(1)
其中,KP表示比例调节系数。当比例调节作用于自动控制系统时,系统的特征方程可以表述为
Ds=1+KpG0(s)H(s)=0
(2)
其中,G0(s)表示传递函数;H(s)表示调节函数。
图3表示对收割机自动控制系统进行比例调节的线性系统结构。
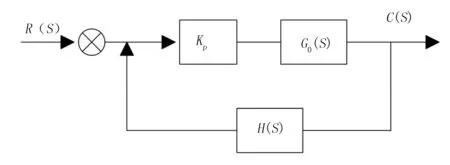
图3 比例调节示意图
当改变比例调节系数KP的大小时,系统的响应速度会发生改变。这是由于闭环系统的极点发生了改变,可有效地提高系统的精度,但同时会对系统的稳定性造成影响。因此,需要结合微分调节来进一步对系统进行校正,比例微分调节的传递函数模型可写成
Gc(s)=Kp+KDs
(3)
其中,KD表示微分调节系数。
控制器的信号可以表示为
(4)
原系统的开环传递函数为
(5)
其中,wn表示系统频率;ζ表示系统阻尼。
串入PD控制器后系统的开环传递函数
(6)
由PD控制器的表达式可以看出:利用PD控制相当于在传递函数上增加了一个零点,该零点在负的实轴上,其表达式为s=-KP/KD。积分函数的表达式为
(7)
其中,KI表示积分系数。引入比例控制后,其传递函数可以表示为
(8)
由PI控制器的表达式可以看出:利用PI控制相当于在传递函数上增加了一个零点,该零点在负的实轴上,其表达式为s=-KI/KP,从而可以使系统得到合适的零点。对比例调节、微分调节和积分调节进行叠加可得
(9)
PID控制可以提供一个极值点和两个零点,从而可以全面的提高系统的动态性能。式(9)可以改写为
(10)
(11)
在实际工作时比较难实现微分环节, 因此加了一个惯性项,只要比例、积分和微分调节配合的合理,就可以实现较好的控制效果。
3 联合收割机路径规划测试
为了验证禁忌搜索PID控制算法在联合收割机自动路径规划中的作用,利用单片编程技术将该算法嵌入到了联合收割机智能控制台上,并对收割机进行实地测试,如图4所示。

图4 收割机作业图
为了使测试具有普遍意义,作业目标选择多样化,并且选取数目不同的目标进行规划,选取的目标数目分别为5、10、15个,选择的地块形状如图5所示。
图5 测试地块形状
在测试地块上选择作业目标进行路径规划,根据目标距离的长短,使用禁忌算法对目标进行规划。为了降低算法的误差,采用PID算法进行编程,通过对反馈信号的控制,提高系统的精度。通过测试得到了如图6所示的路径搜索曲线。
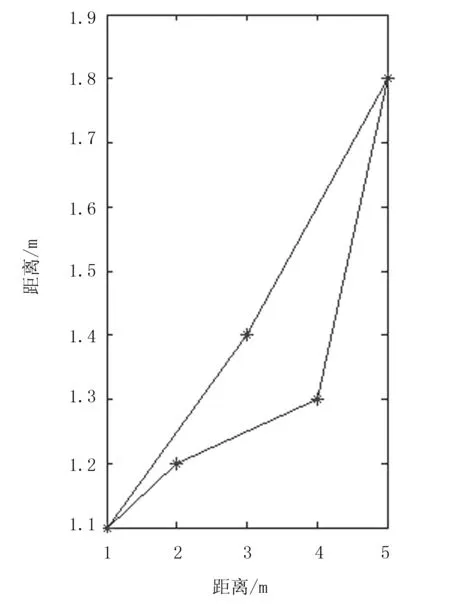
图6 5个目标点路径搜索规划结果
由图6可以看出:为了在最短距离内完成作业目标,直接采用1台收割机从出发地点出发,收割完成后正好返回出发地即可。
图7表示目标点数为10个时的路径搜索规划结果曲线。由图7可以看出:为了在最短距离内完成作业目标,需要采用3台收割机。其中,1台作业完成后正好回到起始地点,另外两台收割机收割完成后在同一结束点。
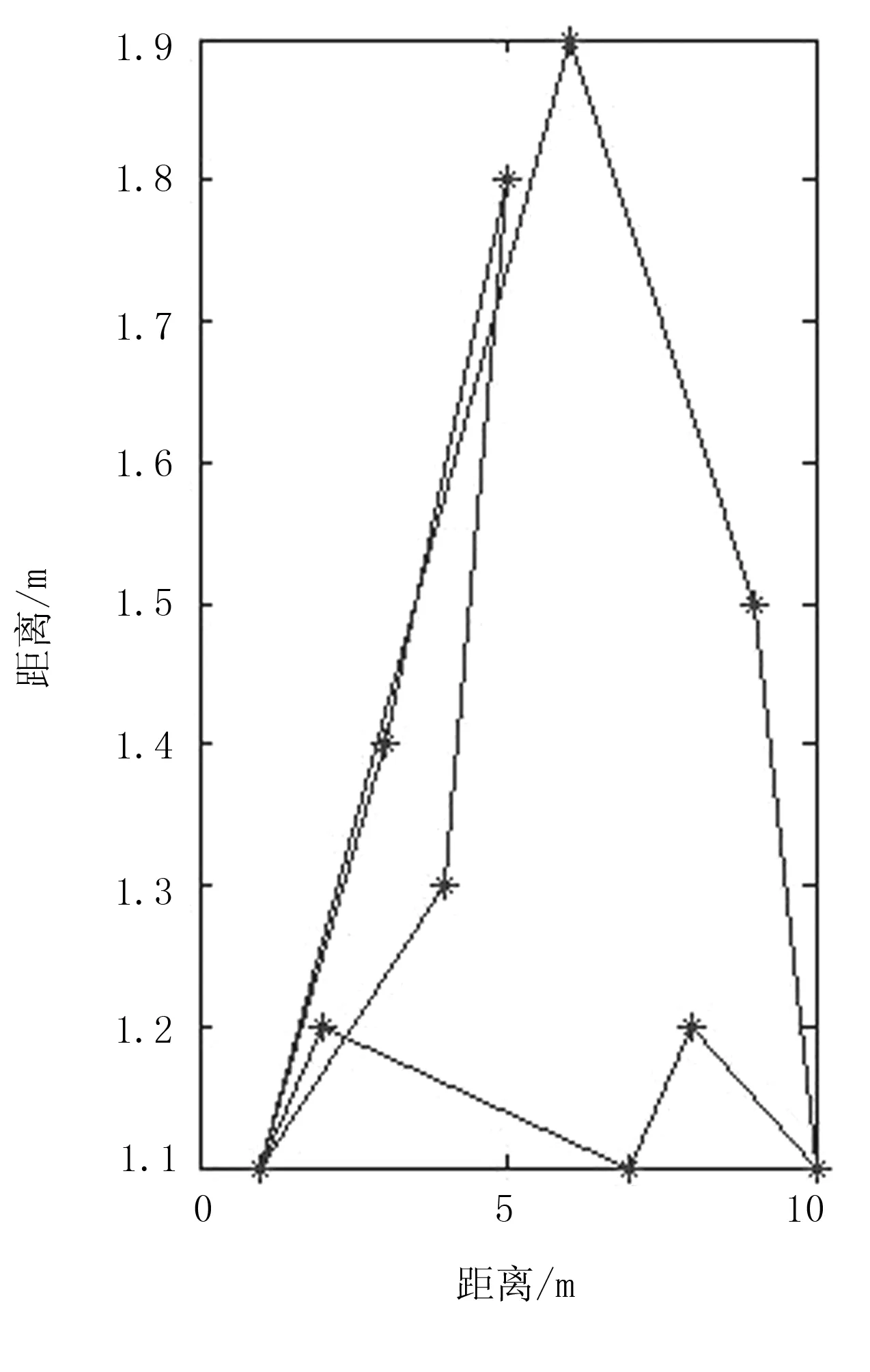
图7 10目标点路径搜索规划结果
图8表示目标点数为15个时的路径搜索规划结果曲线。由图8可以看出:为了在最短距离内完成作业目标,需要采用3台收割机,3台收割机作业完成后正好回到起始地点。
为了验证算法的有效性,对收割机的作业时间进行了测试和统计,得到了如表1所示的时间对比结果。由表1可以看出:采用禁忌搜索PID算法要比PID算法节省大量的时间。
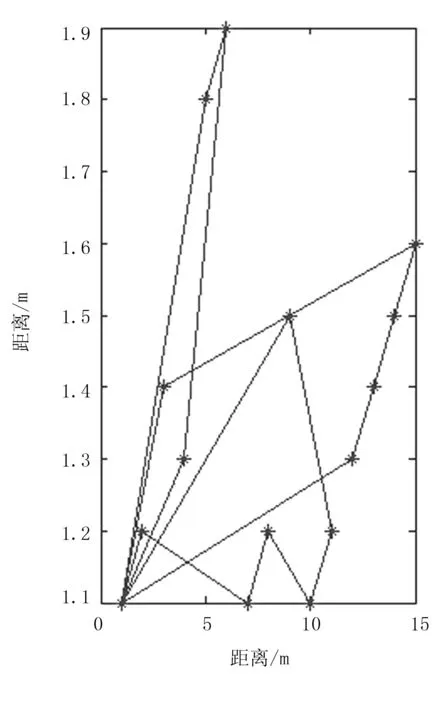
图8 15个目标点路径搜索规划结果
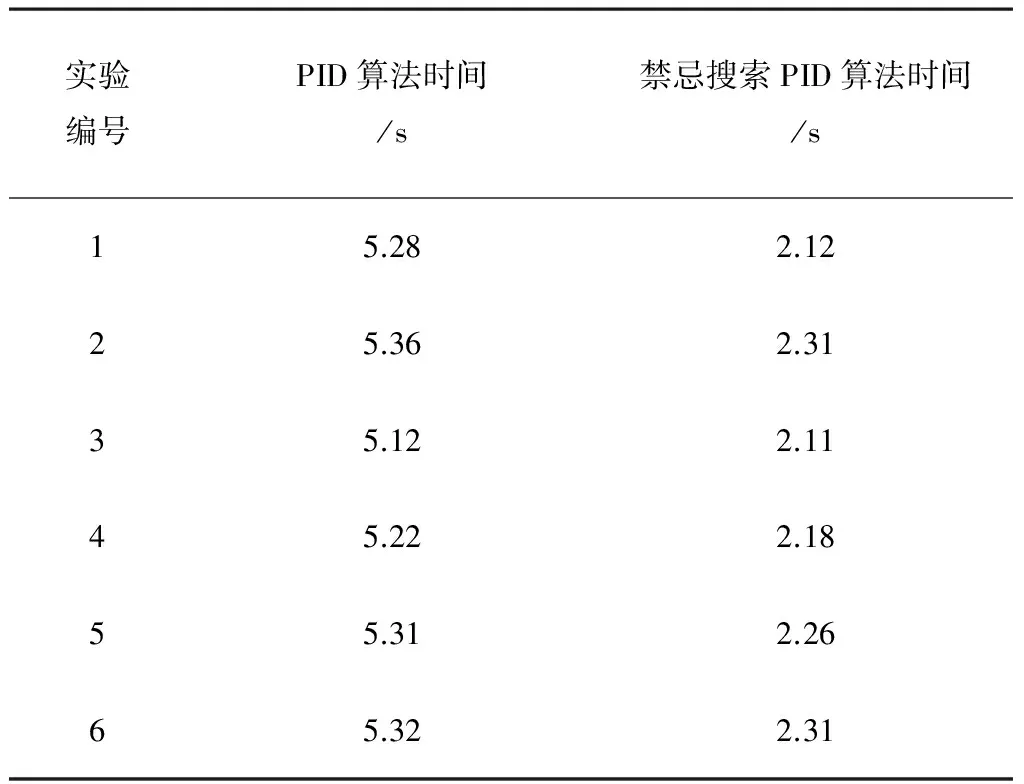
实验编号PID算法时间/s禁忌搜索PID算法时间/s15.282.1225.362.3135.122.1145.222.1855.312.2665.322.31
为了进一步验证算法的可靠性,统计了算法实现过程的迭代误差,迭代次数曲线如图9所示。由图9可以看出:使用禁忌搜索PID算法具有更快的收敛速度,而收敛误差也明显降低,从而验证了该算法在收割机上使用的可行性。
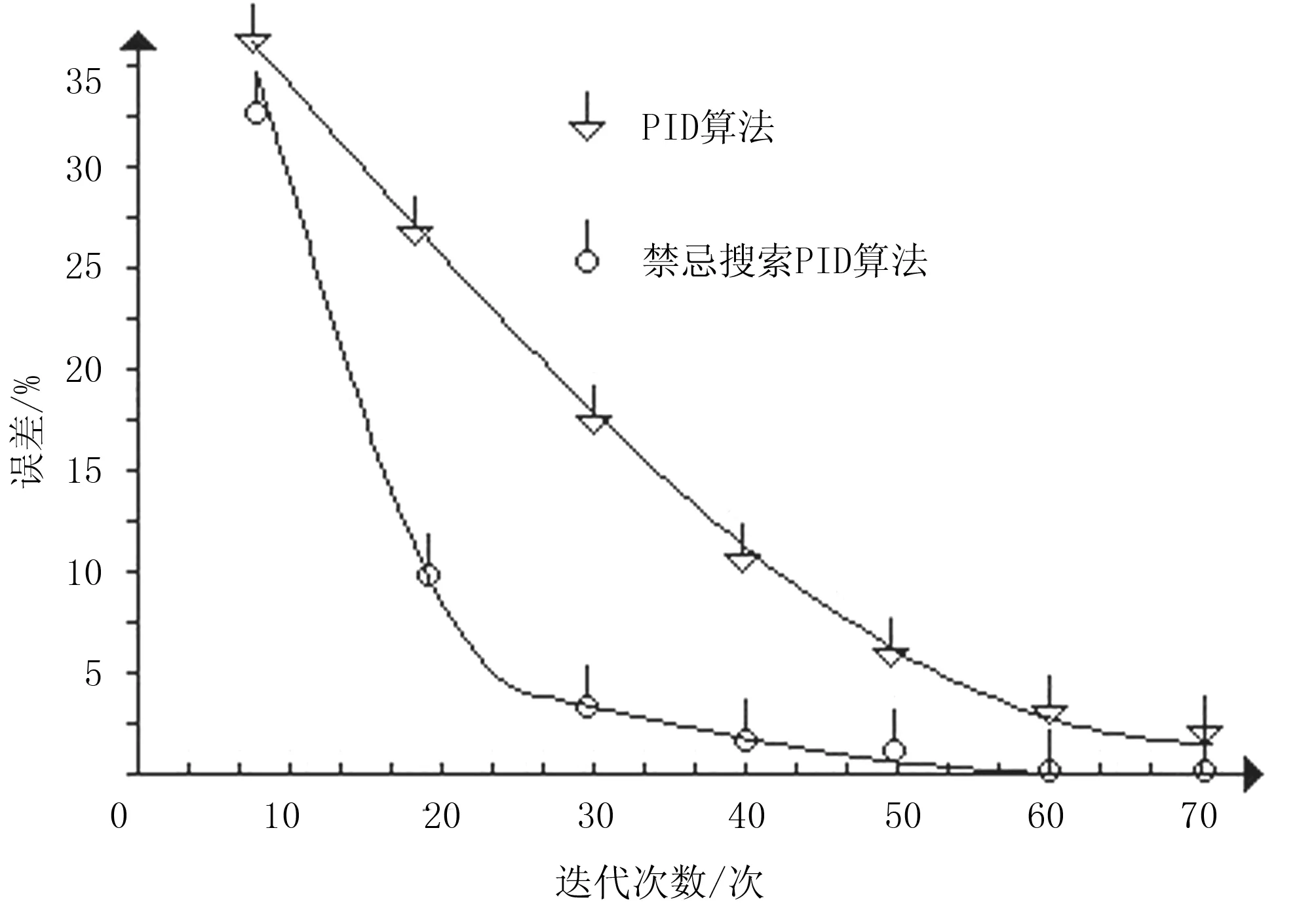
图9 迭代计算次数曲线
4 结论
基于禁忌搜索算法,提出了一种联合收割机路径优化的PID控制模型,并利用单片机编程技术设计了联合收割机的智能路径规划控制平台,有效地提高了联合收割机的作业效率和智能化程度,提高了收割机的作业地块的适应能力。对禁忌搜索算法和PID控制的模型进行了实验测试和软件仿真,结果表明:使用禁忌搜索PID算法可以有效地缩短路径规划距离,提高搜索效率, 在较少的迭代步数情况下提高系统的精度。
[1] 陈科尹,邹湘军,熊俊涛,等.基于视觉显著性改进的水果图像模糊聚类分割算法[J].农业工程学报,2013,29(6):157-165.
[2] 王文庆,张涛,龚娜.基于多传感器融合的自主移动机器人测距系统[J].计算机测量与控制,2013,21(2): 343-345.
[3] 郭艾侠,邹湘军,朱梦思,等.基于探索性分析的荔枝果及结果母枝颜色特征分析与识别[J].农业工程学报,2013,29(4):191-198.
[4] 项荣,应义斌,蒋焕煜.田间环境下果蔬采摘快速识别与定位方法研究进展[J].农业机械学报,2013,44 (11):208-223.
[5] 魏泽鼎,贾俊国,王占永.基于视觉传感器的棉花果实定位方法[J].农机化研究,2012,34(6):66-68,112.
[6] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报,2012,43(11):209-213.
[7] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12): 165-170.
[8] 袁挺,纪超,陈英,等.基于光谱成像技术的温室黄瓜识别方法[J].农业机械学报,2011,42(S1):172-176.
[9] 熊俊涛,邹湘军,陈丽娟,等.采摘机械手对扰动荔枝的视觉定位[J].农业工程学报,2012,28(14):36-41.
[10] 吕继东,赵德安,姬伟,等.采摘机器人振荡果实动态识别[J].农业机械学报,2012,43(5):173-196.
[11] 王新亚.基于MEA-BP神经网络的主汽温控制系统的研究[J].山西焦煤科技,2009(3):13-15.
[12] 王亚斌.基于BP神经网络PID控制及其仿真[J].江苏冶金报,2008,36(2):33-25.
[13] 马平,朱燕飞,牛征.基于神经网络的主汽温控制系统[J].华北电力大学学报,2001,28(2):52-55.
[14] 王辉,毛文华,刘刚,等.基于视觉组合的苹果作业机器人识别与定位[J].农业机械学报,2012,43(12):165-170.
[15] 李寒,王库,曹倩,等.基于机器视觉的番茄多目标提取与匹配[J].农业工程学报,2012,28(5):168-172.
[16] 李立君,李昕,高自成,等.基于偏好免疫网络的油茶果采摘机器人图像识别算法[J].农业机械学报,2012,43(12):209-213.
[17] 钱建平,杨信廷,吴晓明,等.自然场景下基于混合颜色空间的成熟期苹果识别方法[J].农业工程学报,2012,28(17):137-142.
[18] 顾宝兴,姬长英,王海青,等.智能移动水果采摘机器人设计与试验[J].农业机械学报,2012,43(6):153-160.
[19] 王海青,姬长英,顾宝兴,等.基于机器视觉和支持向量机的温室黄瓜识别[J].农业机械学报,2012,43(3):163-167.
[20] 蔡晋辉,才辉,张光新,等.复杂环境下自动导引车路径识别算法[J].农业机械学报,2011,42(10):20-24, 89.
[21] 刘金帅,赖惠成,贾振红.基于YCbCr颜色空间和Fisher判别分析的棉花图像分割研究[J].作物学报, 2011,37(7):1274-1279.
[22] 朱群峰,黄磊.温室移动机器人轨迹控制系统的设计[J].农机化研究,2009,31(4):73-75.
The Shortest Path Design of Combine Harvester——Based on Tabu Search and PID Algorithm
Zhang Xiaoyun1, Wang Lijuan2a,2b, Xiong Qiong3
(1.Mianyang Polytechnic,Mianyangg 621000, China; 2.Jiaozuo Teachers College,a.School of Computer and Information Engineering, b.Institute of Computer Applied Technology, Jiaozuo 454000,China; 3.School of Information Engineering,Wuhan Technology and Business University,Wuhan 430065, China)
In order to improve the intelligent path planning efficiency and automation of the production capacity in the combine harvester in complex plots, improve the adaptive capacity of the harvester, it proposed a tabu search of intelligent combine automatic path planning based on optimization scheme. By using PID feedback control algorithm, it can reduce the computational error. It established the combine intelligent search of tabu algorithm model, and it tested the design of the integral and derivative and proportional adjustment of PID control model and the field and software testing method of the algorithm feasibility and reliability. Test results show that the PID control algorithm can effectively shorten the path planning and improve the accuracy of the algorithm, which proves the feasibility of the algorithm in the intelligent control of the harvester.
combine harvester; path planning; self adaptation; tabu search; PID algorithm
2016-05-05
四川省教育厅科技项目(13ZB0388 );河南省高等学校青年骨干教师项目(2012GGJS-288);武汉工商学院科学研究项目(A2016010)
张晓云 (1968-),女,四川眉山人,副教授,硕士,(E-mail)xiaoman1972@sina.com。
熊 琼(1981-),女,湖北鄂州人,讲师,硕士,(E-mail)joanxiong@foxmail.com。
S225.3;TP393
A
1003-188X(2017)08-0053-05
