悬挂式农机具电液智能控制系统设计
2017-12-16刘性宝龚丽农赵丽清赵艳华李瑞川
刘性宝,龚丽农,赵丽清,赵艳华,孙 艳,李瑞川
(1.青岛农业大学 机电工程学院, 山东 青岛 266109;2.山东五征集团有限公司,山东 日照 262306)
悬挂式农机具电液智能控制系统设计
刘性宝1,龚丽农1,赵丽清1,赵艳华1,孙 艳1,李瑞川2
(1.青岛农业大学 机电工程学院, 山东 青岛 266109;2.山东五征集团有限公司,山东 日照 262306)
我国农业机械工作部件大多数为纯机械式驱动,无法根据工况及时变化、独立调整,从而影响工作性能。为此,针对悬挂农机具的工作部件,设计了机电液智能控制系统。通过基于单片机控制比例阀的液压驱动调速技术和提升手柄控制系统的设计,实现悬挂式农机具工作部件工作状态的实时检测与反馈式智能控制。试验表明:该悬挂农机具电液智能控制系统能够实现悬挂农机具工作部件工作状态与自动监控技术的有机融合,提高了系统的智能化水平。
悬挂农机具;智能控制;提升手柄;比例阀
0 引言
随着精准农业的发展,对农机工作部件智能控制的需求越来越广泛。目前,针对悬挂式农机具的智能化控制研究还处于空白,其主要原因是悬挂农机具的工作部件绝大多数为地轮驱动或动力输出轴驱动,其工作转速与行驶速度有关,无法根据工况及时变化、独立调整。本文采用机电液结合的方法,研究了针对悬挂农机具工作部件的机电液智能驱动控制系统,为悬挂式农机具搭建了智能控制平台。
1 系统总体设计
本系统由微处理器模块、驱动器模块、速度传感器反馈模块、液晶屏显示模块、动力输出电液系统模块及提升手柄控制系统模块组成,如图1所示。

图1 悬挂农机具电液智能控制系统组成
本系统微处理器模块以STM32F103单片机主控单元为核心,通过输出PWM信号来控制由DRV8412为主芯片的比例阀驱动电路,实现比例方向阀的液压驱动调速[1]。速度传感器反馈液压马达输出轴实际转速信息,实现动力输出与悬挂农机具工作状态的闭环智能控制。液晶触摸屏通过串口与单片机主控单元进行通信,主要完成各参数的设置输入与工作状态下各参数的实时显示。动力输出电液系统模块主要完成原动机输出的旋转动能转换为液体的压力能,驱动工作部件作旋转运动,并根据主控制器指令调节液体压力回路的流量和压力。提升手柄控制模块接收主控系统指令完成对悬挂农机具升高或降低,完成自动智能控制。
2 系统硬件设计
系统硬件主要包括信号输入单元、驱动控制单元、显示单元、液压机械连接单元及通讯设计。单片机STM32F103主控单元按照信号输入单元传输的指令输出相应的PWM信号控制驱动芯片DRV8412,从而控制比例方向阀线圈中电流大小,实现比例方向阀的开度控制。驱动控制系统通过A/D采样反馈比例方向阀线圈中实际电流值使比例方向阀保持恒定的开度,通过调节输入的PWM信号占空比来实现对比例电磁阀电流的精准控制[2]。
2.1 比例方向阀驱动控制电路设计
比例方向阀驱动控制电路图如图2所示。由主控单元的PWM输入信号输出到DRV8412驱动控制电路,从而实现比例方向阀的脉宽调制。在比例方向阀的驱动控制电路中,将DRV8412的4路PWM输入口与STM32F103单片机的4路PWM输出口相连,将芯片的FOULT和OTW与单片机的GPIO相连,在系统的运行过程中可以通过判断这两个引脚的电平状态来判断芯片的运行状态。
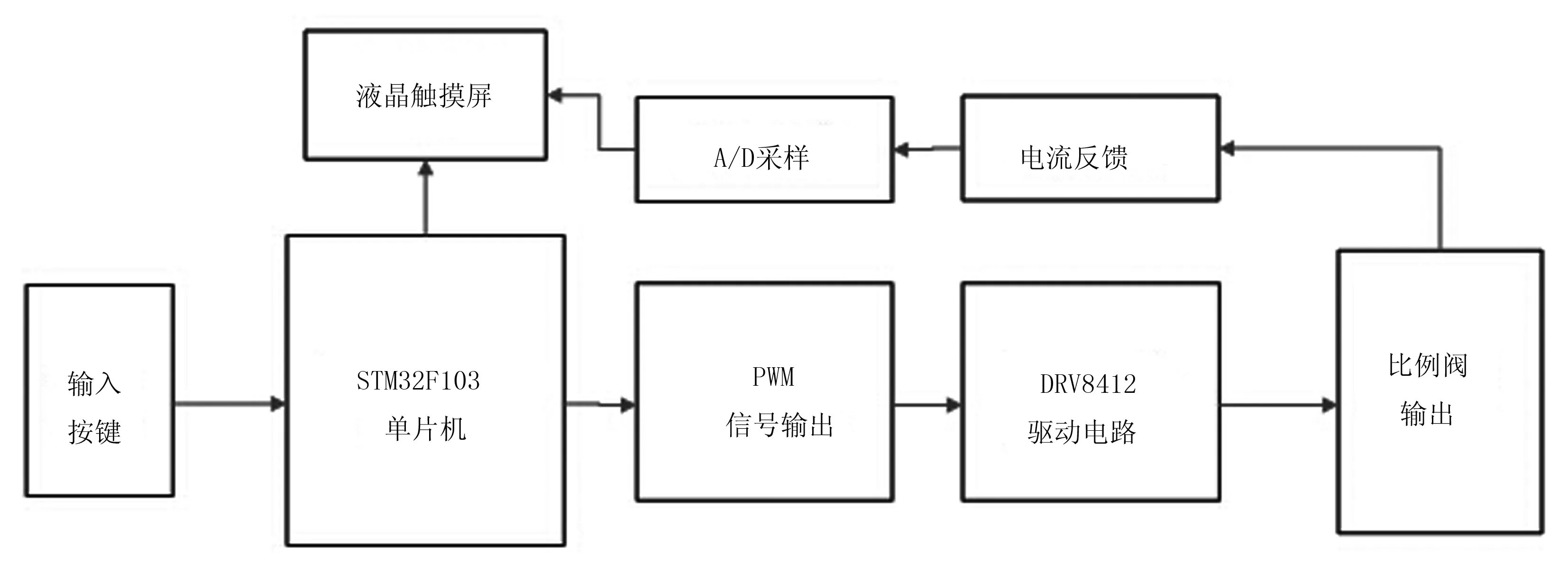
图2 驱动控制电路结构框图
本比例阀驱动电路模块中,DRV8412驱动芯片采用双路全桥工作模式,其输入的多路PWM信号分别控制主芯片的半桥,每个半桥有1个单独的栅极驱动电源、自举引脚及1个功率级电源引脚,提供对称的电气特性。
比例方向阀的输入引脚可连接驱动控制电路功率输出引脚,其输入引脚输入PWM信号可直接控制多路比例方向阀工作,最大连续驱动能力高达12A。该DRV8412主芯片响应一个故障时立即设置半桥输出在高阻抗状态,并且FAULT引脚为低电平。在过电流或温度过高等情况下,设备在故障条件已被删除或栅极电压增加时自动恢复。
2.2 液晶屏显示模块设计
电液智能化控制系统选用的显示设备是迪文DMT80600T104液晶触摸显示屏。这种显示屏不仅功耗低、电压低、亮度均匀、性能稳定,而且可以在同一个屏幕上面显示大量数据和彩色图片。
DMT80600T104液晶显示屏通过串口RS232与单片机主控单元进行通信,在液晶显示屏上显示其输出,分别为“实时速度”“实时方向”“设置速度”“设置方向” ,如图3所示。其中,系统初始化后其输出为当前方向和当前速度,当进行外部调节时,根据触摸按键操作设置转速、方向;设置完毕后触摸开关操作,即可执行设置的方向和设置的速度输出。

图3 液晶触摸屏初始化图
2.3 动力输出电液系统设计
悬挂农机具的电液智能化控制系统中,动力输出电液系统的设计直接影响工作部件的性能。为此,通过对负载、运动方式和控制精度进行分析,确定其主要参数,并设计出动力输出电液系统原理图,如图4所示。液压系统包含两个单通道回路,采用一个CBT-E550型液压泵作为动力源,其液压系统中液压泵由拖拉机的动力输出轴向其提供动力,将拖拉机的机械能转换成液压系统的液压能[3]。
拖拉机动力输出轴和液压油泵输出轴的连接方式采用伸缩型十字轴式万向联轴器,主要包括万向节、轴套及轴承[4],具有大角度补偿能力,并且轴向位移补偿能力强、回转能力大、传动平稳性好,如图5所示。

1.油箱 2.液压泵 3.溢流阀 4.比例方向阀 5.安全阀 6.调速阀 7.液控单向阀 8.液压油缸 9.液压马达
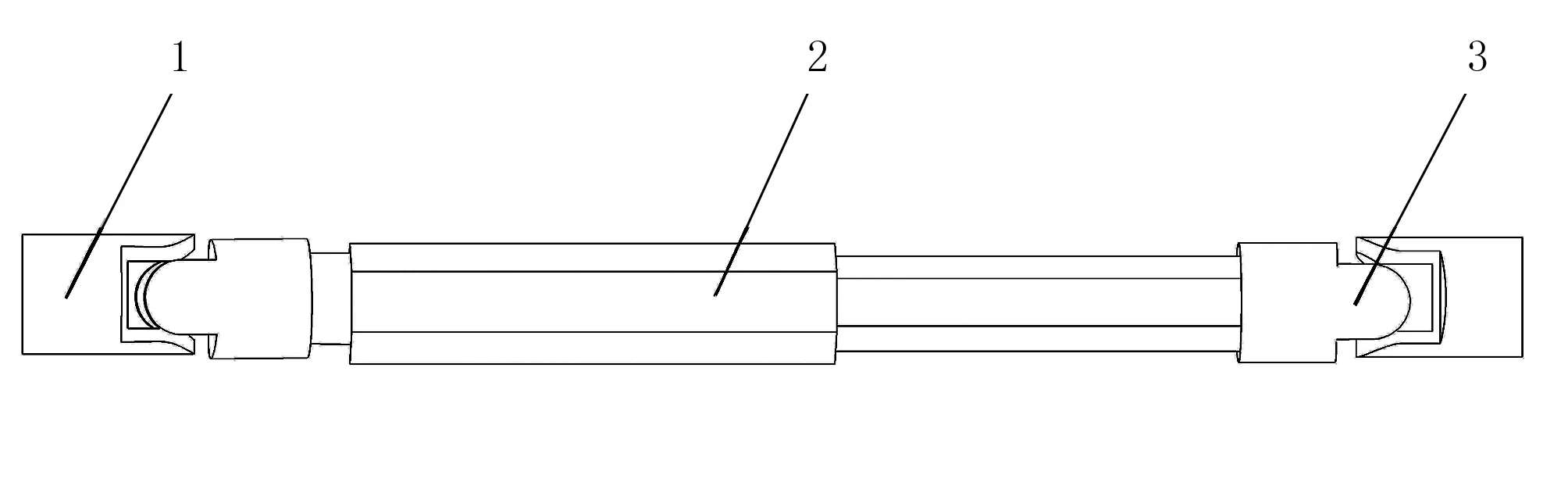
1.万向节 2.轴套 3.轴承
拖拉机动力输出轴向液压泵提供动力,将机械能转化为液压能;液压油通过比例阀实现方向、压力、流量调节后经外接油路传输到液压马达中,从而控制了液压系统工作部件方向的变换、力量的大小及速度的快慢,推动各种液压机械做功[5]。在总回路中设置有溢流阀和安全阀,用于控制回路的流量和压力,实现系统压力恒定,避免液压系统过载。在液压泵出油口和比例阀进油口之间安置有压力表,用于观察系统压力,便于检测系统故障时调节系统压力。在比例方向阀输出端和工作部件的输入端之间安装有流量计和压力传感器,用于检测各油路工作时的流量和压力,便于了解系统稳定性和试验数据采集。
2.4 提升手柄控制系统设计
提升手柄控制系统的设计直接关系到电液智能化的协调性,通过对液压系统工作部件的动作性和电动缸的反应性进行分析,确定其主要参数,并设计出提升手柄控制系统结构图。电动控制系统主要由电动缸、Y型推拉杆、U型连接板和液压手柄4部分组成。其中,提升手柄控制系统结构如图6所示。
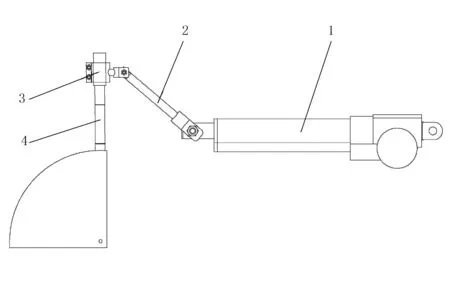
1.电动缸 2.Y型推拉杆 3.U型连接板 4.液压手柄
提升手柄控制系统采用电动缸作为执行机构,不仅可以减少采用气动执行机构所需的气源装置和辅助设备,而且也可以减少执行机构的质量。手柄控制系统在做功时,电动缸的直流电机根据输入信号进行正反转,驱动电动缸的推杆按照既定的伸缩方向和额定速度V1进行伸缩运动,电动缸的推杆以推力F1带动Y型推拉杆运动;同时,Y型推拉杆驱动U型连接板和液压手柄进行做功,液压手柄在U型连接板的驱动下以手柄另一端为圆心做角速度为ω1的圆周运动。其提升手柄控制系统结构运动简图如图7所示。
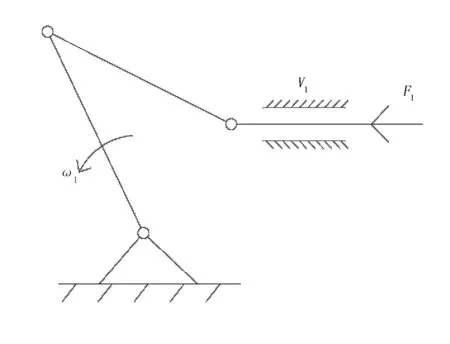
图7 提升手柄控制系统结构运动简图
3 系统软件设计
电液智能化控制系统的驱动软件部分在Keil uVision 5开发环境中进行开发,总体结构主要包括通用GPIO口的分配、PWM信号的输出模式,采用的设计方法为自上而下的模块化设计。在程序系统配置时,针对PWM占空比、定时器、A/D采集程序及输入设备和液晶显示屏进行初始化。软件程序的设计采用每个模块独立工作的模式,各模块子程序分别完成对外部信号的采样、存储,以及驱动外部的硬件电路与外界通讯等功能。系统软件设计流程框图如图8所示。

图8软件主程序流程图
比例方向阀控制运用STM32F103单片机主控单元的定时器工作模式,运用函数修改通道上的PWM占空比来实现比例方向阀的线圈电流大小的精准调控。液晶屏显示模块通过串口与单片机进行指令读取,利用外部中断来启动或关闭指令交互,每隔20ms发送一次命令,来读取输入值和反转指令。提升手柄控制系统根据主控单元指令来控制电动缸的正反转,驱动电动缸的推杆运动来启动拖拉机的后悬挂提升臂,实现悬挂农机具的位置变化。
4 性能试验
1)试验设备:五征TA354型拖拉机;洪珠4U-170型马铃薯收获机。
2)试验方法:在实验室内,利用五征的TA354型拖拉机动力输出轴提供原动力,使用动力输出电液系统将动力输出的机械能转化为液压能,将实验室内的悬挂农机具洪珠的4U-170型马铃薯收获机作为负载进行试验,如图9所示。

图9 实验室现场试验图
3)试验过程:使用拖拉机的手锁油门保持动力输出轴输出相同的转速,提供相同的动力;通过液晶触摸操作来改变STM32主控单元的PWM信号占空比,进而改变比例方向阀上的电流大小,实现比例方向阀的液压驱动调速;根据液晶触摸显示屏读取触摸设置的数据值和液压马达当前转速。在数据处理的过程中,将液压油进油口压力设置为10MPa,调节PWM信号占空比时每次增加5%,其所得不同的占空比与对应马达有载转速值如表1所示。
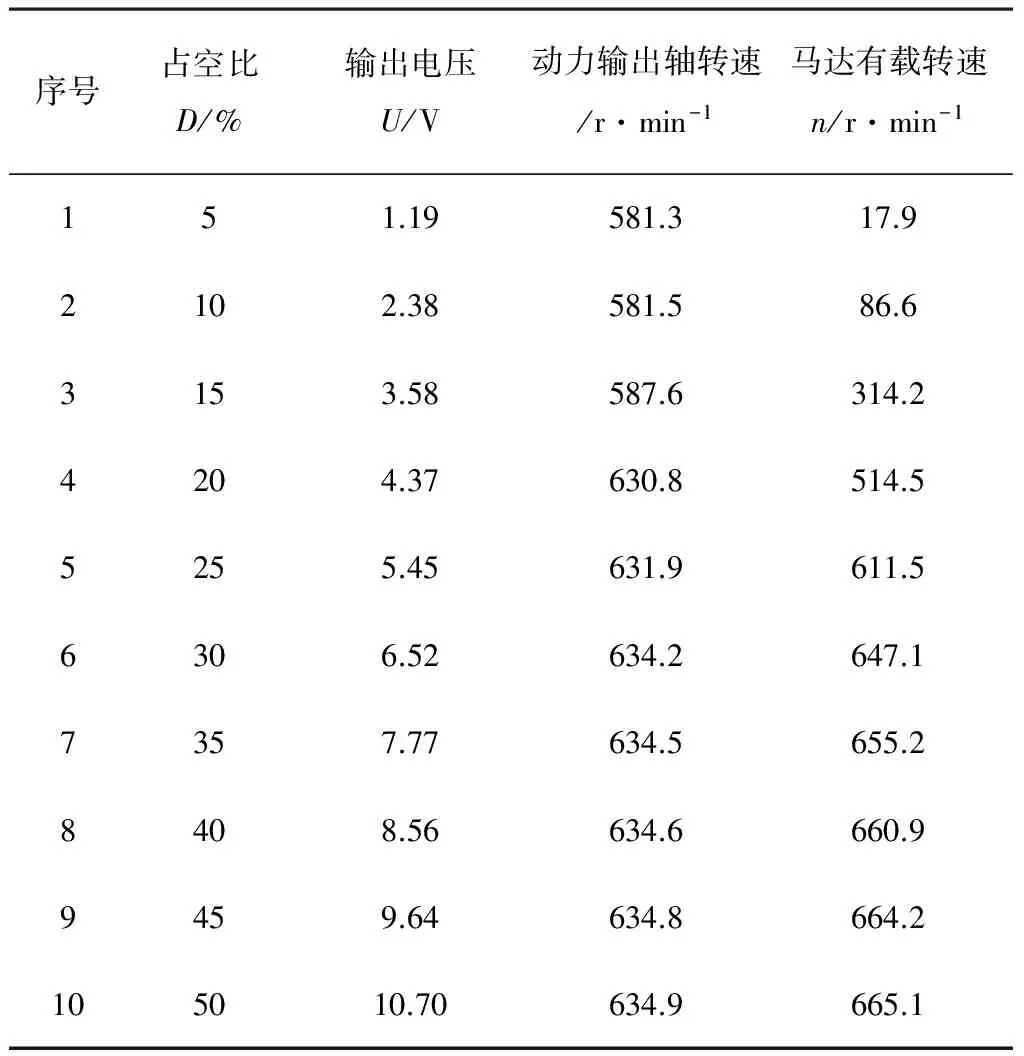
表1 不同占空比与对应转速表
最终,通过试验数据得到的液压马达有载转速和PWM占空比关系曲线波形图,如图10所示。
由图10可知:随着PWM信号占空比的增加,马达转速逐渐增大;占空比在10%~20%变化时,马达有载转速从86.6r/min逐渐增加到514.5r/min,其线性关系较好;动力输出轴在20%的占空比时,受到负载的反馈作用,旋转速度突增。由试验可知:占空比小于5%时,产生了比例阀开度死区,流量不足,转速为0。当占空比达到50%时,比例阀开度达到了最大,出现了流量饱和现象。
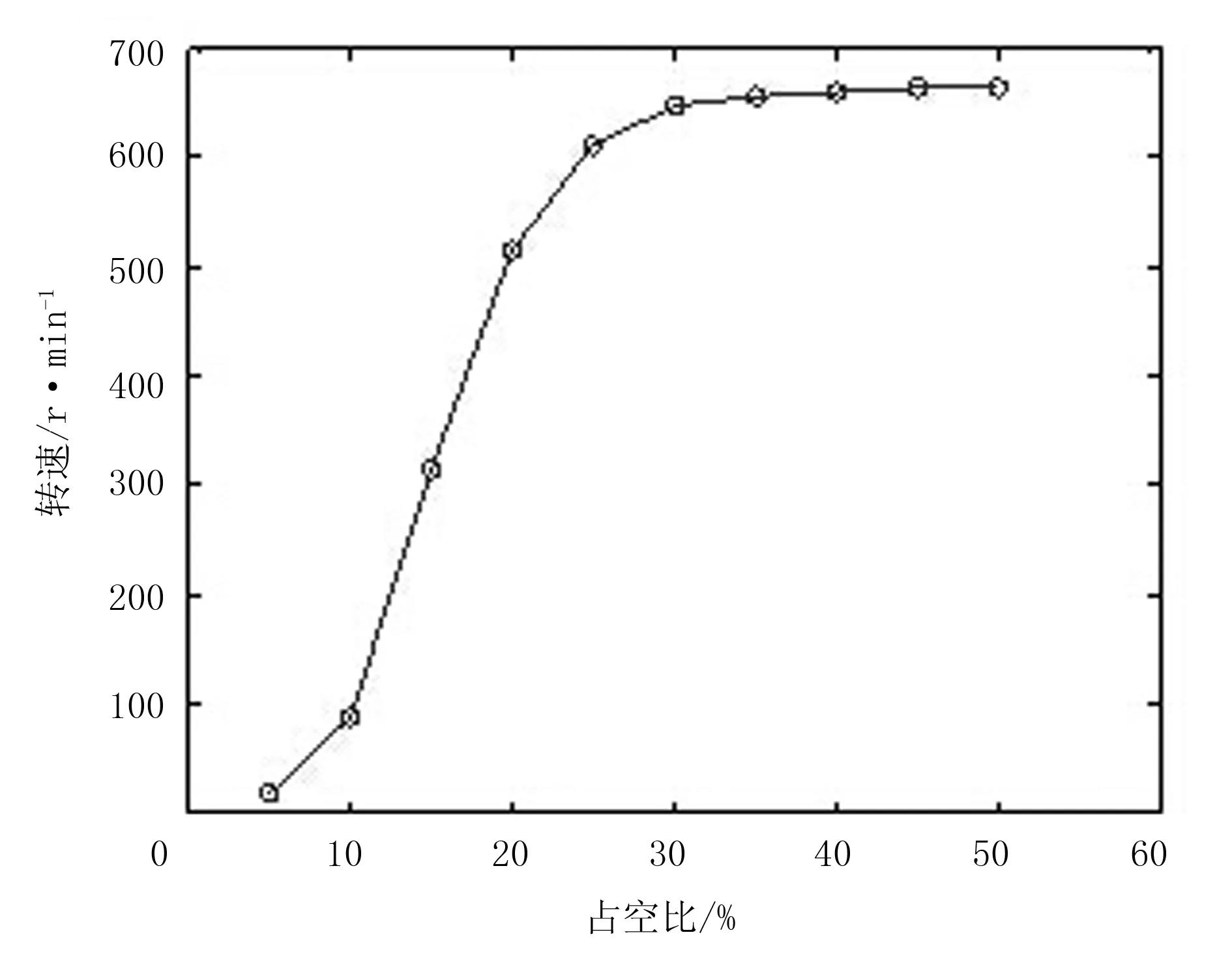
图10 转速与占空比的关系曲线图
5 结论
本悬挂农机具电液智能化控制系统设计在动力输出轴提供动力的作用下,液压马达转速可通过调节PWM信号占空比来改变,实现了智能化控制。试验表明:工作部件工作时对动力输出轴产生反馈作用力,需要增加反馈系统来自动监控农机工作部件的工作状态,构成闭环控制系统,实现系统的自动调节。
[1] 黎青,张福建. 基于Cortex-M3的本安型比例电磁阀驱动电路设计[J]. 煤炭技术,2014(6):171-173.
[2] 郝建树,孟大伟,陈少功,等.基于PWM整流技术的电磁制动器闭环控制系统研究与设计[C]//中国高等学校电力系统及其自动化专业第二十七届学术年会论文集·秦皇岛:中国电机工程学会,2011:1-5.
[3] 赵静. 液压传动和拖拉机液压传动系统的运用[J].农机使用与维修,2014(10):50.
[4] 程玉.基于有限元法的无螺栓十字轴联轴器的设计及分析[D].合肥:合肥工业大学,2010.
[5] 韩庆福,景年强,孟国龙,等.一种后支撑桥提升的电动液压控制系统的设计[J]. 汽车电器,2014(9):37-39.
Design of Mounted Equipment Electro-Hydraulic Intelligent Control System
Liu Xingbao1, Gong Linong1, Zhao Liqing1, Zhao Yanhua1, Sun Yan1, Li Ruichuan2
(1.College of Mechanical and Electrical Engineering, Qingdao Agricultural University, Qingdao 266109, China; 2. Shandong Wuzheng (Group) Co.Ltd., Rizhao 262306, China)
Most of China's agricultural machinery working parts adopt pure mechanical drive, they can't change timely and adjust independently according to working condition, so work performance is affected. Aiming at the working parts of mounted equipment in this paper, the mechanical electrical and hydraulic intelligent control system was designed. And MCU controlled proportional valve, then hydraulic drive speed control technology and lifting handle control system were designed, the working state real-time detection and feedback intelligent control of mounted equipment working parts were realized. Tests showed that the mounted equipment electro-hydraulic intelligent control system could realize the organic integration between mounted equipment working parts working state and automatic monitoring technology, the intellectua-lization of system was improved.
mounted equipment; intelligent control; lifting handle; proportional valve
2016-01-26
山东省重点研发计划项目(2015GNC112013); 山东省自主创新专项(2013CXC90205)
刘性宝(1991-),男,山东菏泽人,硕士研究生, (E-mail)lxb678128@163.com。
龚丽农(1991-),女,上海人,教授,硕士生导师, (E-mail) gln2135@163.com。
S237
A
1003-188X(2017)02-0186-05
