履带式收割机远程状态监测系统智能终端的研究
2017-12-16张晓云
张晓云
(绵阳职业技术学院,四川 绵阳 621000)
履带式收割机远程状态监测系统智能终端的研究
张晓云
(绵阳职业技术学院,四川 绵阳 621000)
农业机械设备在实际的生产应用中,常常存在信息管理不集中、设备利用率低及设备维修不及时等问题。为此,以履带式收割机为研究对象,提出了一种基于STM32的履带式收割机远程状态监测系统智能终端,采用嵌入式智控平台、GPS、GSM以及CAN总线技术,实现远程对履带式收割机地理信息、工作信息、清洗夹带损失、机械故障,以及预防突发性障碍的监测和预警。试验表明:该系统终端可以实现对履带式联合收割机实时工作状态和潜在故障信息的准确采集与判断,对实现收割机的地理信息、主动维护和预防突发性故障的发生具有重要的参考价值。
履带式收割机;智能监测;CAN总线;STM32
0 引言
随着工业化、城镇化发展步伐的加快,给农业发展带来较大的需求空间。近年来,我国经济实力不断增强,国家对农村、农业的投入支持力度将不断加大。20世纪以后,机械、电子等科学技术进步及其应用越来越广泛,为农业发展提供了强大的技术支撑。在这个时代背景下,履带式收割机获得快速发展,联合收割机机械和电子控制系统比较复杂、作业环境差、工作负荷大,容易引起其工作不稳定、故障率高。为此,各种收割机工作状态和故障监测系统应运而生,人们提出了“数字农业”的思想,综合了现代信息技术和农业机械等几大学科,应用了智能决策、GPS、GSM、CAN总线及自动控制理论技术。本文将“数字农业”的思想应用于履带式联合收割机,通过各个检测模块和智能监测终端,实时对收割机运行状态及机身各部件进行检测和预警,使联合收割机在作业过程中具有最高的效率。
1 履带式收割机远程监测系统的设计
履带式收割机远程状态智能监测系统主要依托GIS系统、GSM数字公众通讯网络、嵌入式智能终端及GPS系统等高科技,可以准确判断和预警收割机是否偏离正常状态,检测其运行情况,防止突发性障碍的发生。同时,该系统可以实时跟踪收割机的作业情况,提供有效的作业里程、油耗等数据的统计分析,并可提供收割机历史行走轨迹的检索和回放。
联合收割机远程状态智能监测系统的整体结构如图1所示。工作原理:利用车载嵌入式智能终端,收集联合收割机的GPS信息、GIS信息及特征状态信息,通过STM32控制器处理并经由GSM数字公众通讯网络传回至检测控制中心,数据再次处理后存入主服务器;同时可根据定位系统在地图上实时标出目标收割机的位置和移动轨迹。为方便厂商和用户使用,主服务器的信息可以WEB的形式公布到互联网上,让授权人员对联合收割机进行实时状态检测和预警,预防突发性故障的发生。
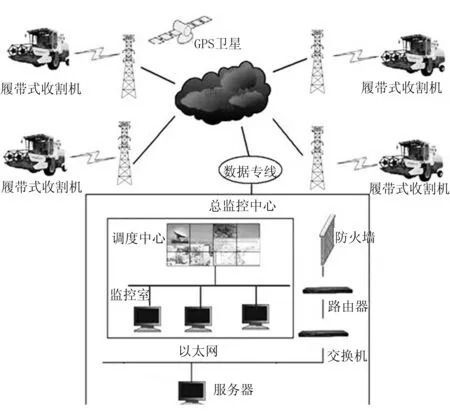
图1 联合收割机远程状态监测系统的整体结构
联合收割机远程状态监测系统智能终端可以安装在移动的收割机上,将收割机的GPS信息、GIS信息及特征状态信息传回至主服务器,方便公司技术人员随时了解在全国投入使用机器的运行状态和地理位置,判断收割机工作性能,方便售后人员主动维修和服务,以达到提高效率、节约成本的目的,做到移动资产的安全生产管理和运行。智能终端的设计主要包括需求分析、系统结构、硬软件设计、整机调试和仿真试验等阶段,其流程图如图2所示。
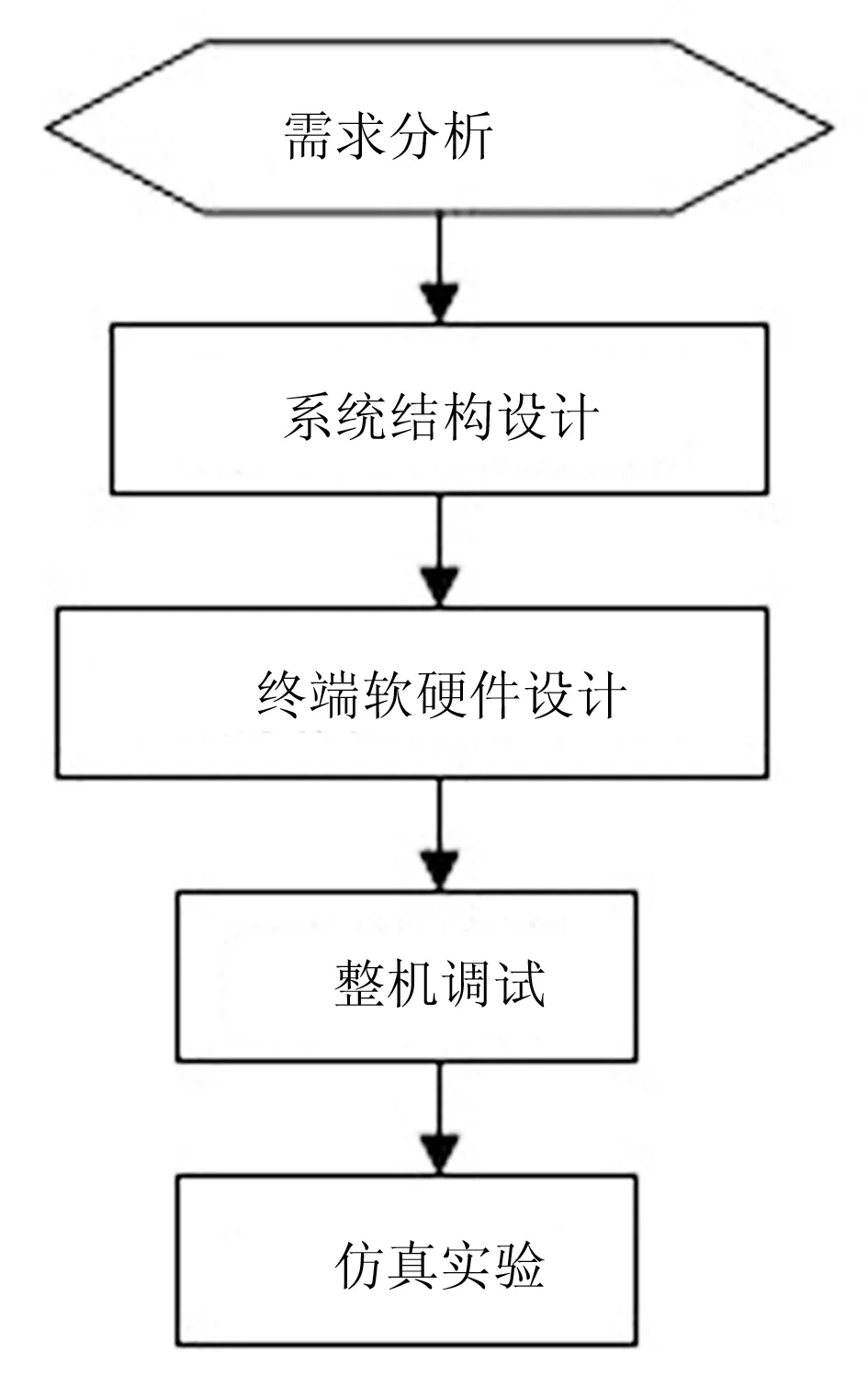
图2 智能终端的设计流程图
2 履带式收割机智能终端的需求分析
根据履带式收割机远程状态设计智能监测终端系统,首先需要对该智能监测终端系统进行需求性分析,根据收割机各项状态参数的技术指标,确定智能监测终端的最终需求方案。
履带式收割机是依靠履带移动的联合收割机,属于大型收割装备,广泛应用于各种农作物的收割现场;与轮式收割机相比,履带式收割机在松软的田间行走方面,对农田土壤压力较小。履带式收割机由HST液压无极变速控制系统、割台、脱粒装置、分离装置、清洗装置、行走系统、底盘系统及电气系统等部件组成。
履带式联合收割机在作业过程中,一定会产生力和能量等参数的传递与变化,这些状态的变化反应了履带式收割机的工作状态。对一台收割机而言,有很多特征信息可以判断机运行器状态,这些信息主要包括直接信息和间接信息两类。
1)直接信息:如履带式收割机各个零部件的磨损程度和老化状况,这些变化极易使收割机产生故障,但收割机在出售使用后,就很难获取各部件使用状况的信息,所以在检测中不能将其作为状态特征参数。
2)间接信息:如履带式收割机的喂入量、作业生产率、发动机的转速及液压系统的中压力与温度等,这些数据信息都间接地反应了收割机工作能力的变化,在收割机作业过程中可根据这些信息对收割机进行检测和预警,是比较有用的状态特征信息。
在收割机工作中,某些故障的发生可能导致一些物理量的变化,但能够直接用于判断机器故障的状态信息应该有以下特点。
1)可靠性:某些特定参数会随着收割机的工作状态发生变化,而且这些特性的参数应该和收割机的工作情况之间呈单值关系,不能出现模糊的关系。
2)敏感性:该特征参数必须在收割机工作状态有细微变化时产生较大的变化,能够最大程度地映射出收割机客观状态。
3)实用性:选定的特征参数容易采集和分析。
根据收割机日常使用情况及对特征信息的仔细分析,本系统主要选用工况信号、压力信号、温度信号及转速信号为检测的特征参数。
智能终端系统设计的需求有功能性和非功能性两种:功能性需求主要是数据采集和信息无线传输的功能;非功能性需求则主要是智能终端的性能、功耗及成本等方面。
远程状态智能监测终端是收割机上的车载装置,主要任务是采集和检测收割机工作状态信息,并由智能控制系统对数据信息进行有效处理,然后将数据以无限传输的方式传送给监测控制中心的主服务器。远程状态智能监测终端的主要功能如下:CAN总线数据采集、GPS定位、自动开关机、数据无线传输及时间标签。
远程状态智能监测终端工作环境在收割机机体内,工作环境比较恶劣,因此需要有高标准的技术参数,主要包括工作电压、工作环境温度、GPS精度及软硬件的可靠性等。
3 收割机远程状态智能终端的硬软件设计
收割机远程状态智能终端包括硬件和软件两部分的设计:硬件包括STM32核心处理器及外围检测和控制设备;软件包括各类传感器检测信息及智能控制模块信息的采集和处理、多参数的计算及显示等。其中,检测信息包括履带式收割机的喂入量、作业生产率、发动机的转速,以及液压系统的中压力与温度等。
3.1 智能监测终端的硬件设计
智能检测终端的硬件系统主要包括STM32处理器、电源管理模块、GPS模块、GSM模块、双CAN总线模块、时钟模块、JIAG调试模块及参数采集存储模块等,其框架图如图3所示。
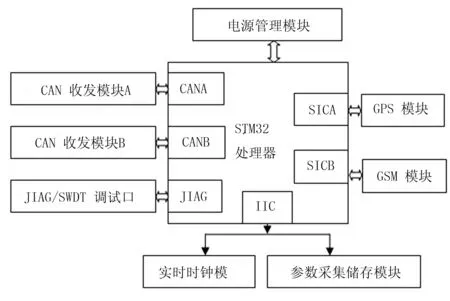
图3 智能监测终端的硬件框架图
1)双CAN总线的设计。CAN总线作为整个智能终端控制和通讯的中心,采用TMS32内部的双路控制模块。双CAN总线的设计为CAN收发器提供物理总线接口。一般情况下,会采用两个高速光耦实现CAN网络电气上的隔离。由于这种设计方法体积大、成本较高,因此采用自带隔离的CAN收发模块。
2)数据接收和发送模块。数据接收和发送系统采用GSM和GPS系统,利用GSM数字公众通讯网络和GPS全球定位系统实现检测信号的接收发送,GSM采用西门子公司的TC35为核心模块,经过RS232与STM32相接,可以将数据信息发送到主服务器上。GSM模块的工作框架图如图4所示。
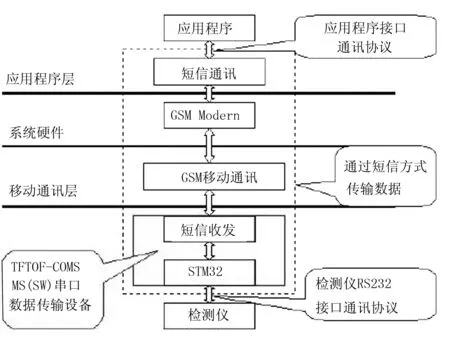
图4 GSM模块的工作框架图
3)自断电电路的设计。为了检测和控制履带式收割机的开机时间,方便关机时刻数据的传输,本智能终端采取了自动断电的设计,其原理如图5所示。当收割机启动开关闭合时,控制继电器处于常闭状态,电流可直接给智能终端供电,在收割机开机的同时开始工作;当收割机关闭电源时,收割机整机关机,智能终端实时监测到变化,控制继电器动作,此时智能终端改由蓄电池供电,带智能终端发送完状态信息后,再次控制继电器动作,智能终端自动断电。
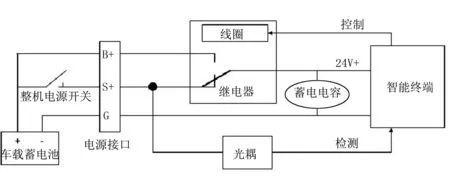
图5 智能终端自断电原理图
3.2 智能监测终端的软件设计
智能检测终端系统上电开机后,进行初始化,然后进入main函数,启动BIOS,交由BIOS控制。智能监测终端软件设计流程图如图6所示。

图6 智能监测终端软件设计流程图
图6中,HWI_cana和HWI_canb是对总线信息进行采集的,一旦CAN总线上有数据信号出现,就会引起中断,并触发SWI_cana和SWI_canb软中断。HWI_clk是通讯时钟信息,负责整合GPS、GIS和收割机工作状态的数据信息,数据整合后再激活TSK_send,将数据通过GPRS网络发送至服务器。该网络协议在数据发送期间不影响其他数据的采集。
4 收割机远程状态智能终端仿真试验分析
为了测试智能终端硬软件的兼容性,在研究过程中利用CCS集成软件进行开发,并对智能终端系统进行硬软件模拟仿真。该仿真平台设备主要包括Seed XDS USB硬件仿真器、CAN mini接口、2台带GPRS数据接收功能的电脑、1台装有ZLGCANTest软件的电脑以及智能终端等。仿真平台框架图如图7所示。
通过仿真平台的反复调试和改进,智能终端达到设计方案的目标,网络组态系统工作稳定,硬件运行正常,软件执行顺畅,整个系统可靠性强。
经过调试和改进后,智能终端的设计基本结束,为验证其实际效果,于2015年10月进行了一次试验,试验地点位于绵阳游仙区。试验中,对几台联合收割机的工作状态进行有效监测,并将状态信息传送回位于武汉的服务器上,服务器上可以通过智能终端实时对收割机进行监控。设备SGJ2511-TEST工作状态检测如图8所示。

图7 智能终端仿真平台框架图
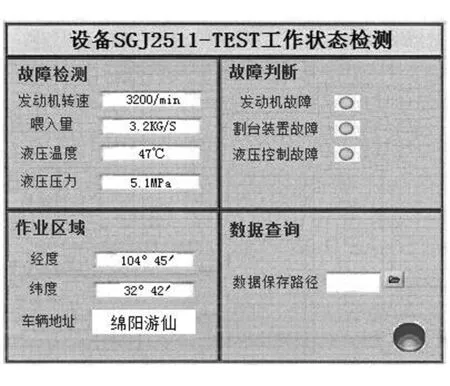
图8 设备SGJ2511-TEST工作状态检测图
开机时,智能终端将进行自检,检测收割机核心工作部件是否正常,并将实时采集处理的信息发送至监测中心的服务器。智能终端将接收的信息通过系统界面实时显示出来,根据收割机发动机速度、喂入量及液压系统的温度和压力判断机器发动机、割台装置、液压控制系统是否有故障或者潜在故障,并将数据保存在服务器上固定的路径上,方便技术人员查找。试验表明:双CAN总线通讯正常,采集参数准确,可以实现对收割机的定位。通过检测机器喂入量、作业生产率、发动机的转速、液压系统的中压力与温度等信号,能够实时了解收割机工作状态和潜在故障,对主动维护和预防突发性故障有重要意义。
5 结语
提出了一种基于STM32的履带式收割机远程状态监测系统智能终端的设计方案,采用嵌入式智控平台、GPS、GSM及CAN总线技术,可以实现对联合收割机的远程检测和预警。仿真与试验结果表明:该系统可以实时完成与服务器信息的共享,能够提前对收割机的潜在故障进行预警,并能通过服务器的跟踪检测,集中调度收割机的作业区域,提高联合收割机的工作效率,为实现联合收割机综合监测控制系统提供了重要的参考价值。
[1] 江波.洞庭湖区水稻联合收割机械的选型与优化配置研究[D].长沙:湖南农业大学,2006.
[2] 杨海滨.大型履带式起重机远程状态监测系统智能终端的设计与实现[D].上海:上海交通大学,2008.
[3] 刘艳娇.基于嵌入式Linux的无线视频监控系统设计与实现[D]. 哈尔滨:哈尔滨工程大学,2012.
[4] 赵建波.联合收割机负荷反馈智能控制系统的研究[D].镇江:江苏大学,2009.
[5] 黄治根.联合收割机负荷反馈系统多信号处理方法的研究[D].镇江:江苏大学,2010.
[6] 种衍林.嵌入式无线视频监控系统设计与实现[D].济南:山东大学,2010.
[7] 白杨.施工升降机运行状态远程监控终端设计与研究[D].南京:南京理工大学,2014.
[8] 董宇.家居智能用电装置设计与实现[D].杭州:浙江大学,2013.
[9] 汤碧翔.基于ARM9嵌入式系统的联合收割机负荷反馈控制系统的研究[D].镇江:江苏大学,2009.
[10] 王敏.基于无线网络技术的智能家居系统设计与基本实现[D].成都:电子科技大学,2009.
[11] 梁学修.联合收割机自动监测系统研究[D].北京:中国农业机械化科学研究院,2013.
[12] 刘华,陈卫灵,邹诗洋,等.南方水稻收获机械应用现状与发展趋势[J]. 现代农业装备,2014(1):37-40.
[13] 崔奋强.小麦联合收割机的总体结构与作业方式设计[J]. 黑龙江科技信息,2014(16):117.
[14] 陈进,宁小波,李耀明,等.联合收获机前进速度的模型参考模糊自适应控制系统[J]. 农业机械学报,2014(10):87-91,86.
[15] 邓中亮,智艳霞.基于MSP430的可便携车载GPS智能终端的设计[J].物流技术,2007(3):87-89.
[16] 谢蓓.基于CAN总线的联合收割机工作状态智能化监测系统的研究[D].南京:南京农业大学,2011.
[17] 王海彬,李光林.小型收割机作业信息监测系统研制[J].农机化研究,2013,35(11):88-91.
[18] 涂广.基于无线局域网的电网环境监测系统开发和研究[D].兰州:兰州理工大学,2011.
[19] 陈进,顾文龙,李耀明.联合收获机智能控制试验台设计与试验[J].农业机械学报,2011(S1):78-81.
[20] 王静,张倩,朱晓言,等.基于CAN总线的联合收割机脱粒滚筒测控系统研究[J]. 农机化研究,2012,34(1):71-75.
[21] 黄荣濂.模糊神经网络在联合收割机脱粒滚筒角速度控制中的应用[D]. 长春:吉林大学,2007.
[22] 王子健.基于FPGA FIFO处理的多路CAN总线高速通信设计[J].计算机测量与控制,2015(2):558- 560.
[23] 耿连才.汽车远程监测与故障诊断系统研究与测试[D].长春:吉林大学,2014.
Research on the Intelligent Terminal of the Remote Monitoring System of the Crawler Harvester
Zhang Xiaoyun
(Mianyang Vocational and Technical College (Mianyang Polytechnic), Mianyang 621000, China)
With the social and economic level of a large increase, China's various industries have made great progress and development. As an important strategy to improve farmers' income and promote agricultural modernization, agricultural mechanization has been developed very rapidly in recent years, but it also has a shortage in the process of wide application. Agricultural machinery and equipment in the actual production and application, often there is a problem of information management is not concentrated, low equipment utilization and equipment maintenance is not timely and other issues. In this paper, the research object of this paper is to study the remote monitoring system of the crawler harvester based on STM32. The intelligent terminal adopts embedded intelligent control platform, GPS, GSM and CAN bus technology to realize remote monitoring and early warning of geographic information, job information, washing and entrainment loss, mechanical failure and Prevention of sudden obstacles. The experiment shows that the system can realize the accurate collection and judgment of the real-time working state and potential failure information of the crawler type combine harvester, which has important reference value for the realization of the information, the active maintenance and the prevention of the sudden failure of the harvester.
crawler harvester; intelligent monitoring; CAN bus; STM32
2015-12-16
四川省自然科学基金项目(2015SC1552)
张晓云(1968-),女,四川眉山人,副教授,硕士,(E-mail)1318747794@qq.com。
S225;TP274
A
1003-188X(2017)02-0176-05
