水稻秸秆深埋整秆还田装置设计——基于数据库集群系统框架
2017-12-16胡菊芬尹强飞
胡菊芬,尹强飞
(江西现代职业技术学院,南昌 330095)
水稻秸秆深埋整秆还田装置设计
——基于数据库集群系统框架
胡菊芬,尹强飞
(江西现代职业技术学院,南昌 330095)
农作物的秸秆还田可以改良土壤性能,增强土壤肥力,进而提高作物产量。为了提高水稻秸秆深埋还田装置的性能,对装置的性能和作业参数进行深入研究,针对装置埋深、土壤密度和装置行进速度3个影响因素水平,设计了装置性能测试的正交试验,并在实验平台上对不同方案的装置阻力进行了测试。为了有效地采集和保存传感器的数据,提出了一种面向物联网海量传感器采样数据管理的数据库集群系统框架(IoT-ClusterDB),传感器的阻力历次采样值被保存为采样数据序列,可以支持对数据的复杂逻辑查询和分布式索引查询,支并持关键字和时空查询。最后,通过实验得到了不同影响因素水平正交试验的装置阻力数值。实验表明:IoT-ClusterDB具有良好的传感器数据接入与查询处理性能,从而缩短了秸秆深埋装置的整个设计周期,提高了设计效率。
水稻;秸秆还田;数据库集群;数据序列
0 引言
随着现代农业的发展,秸秆已成为一种可再生资源,加之粮食产量的稳步提高,秸秆的产量也在大幅度地增加,近年来我国秸秆的产量达到了数亿吨。秸秆可以作为新能源开发、饲料或者直接还田;但我国对于秸秆的利用率较低,大部分采用直接废弃或者焚烧等方式处理,不仅浪费了资源,也引发了更多的环境污染问题。将秸秆深埋还田可以有效地解决秸秆浪费及环境污染问题,对于循环农业的发展具有重要的意义。秸秆深埋装置是秸秆还田的重要设备,在进行设计时,装置行进阻力是主要的作业性能指标,但在利用传感器对阻力值进行采集时,需要借助传感器采样数据集中管理系统,使传感器采集得到的数据按照传输规则传递采集数据,从而形成海量的异构数据流,对于数据的保存和查询具有重要的意义。
1 水稻秸秆深埋还田装置设计
John Deere-HX 秸秆粉碎还田机,通过重型旋转式刀具高速运转将秸秆粉碎还田,该粉碎机的动力由拖拉机提供,其作业幅度大,效率高,机架可以向上折起,节省了设计空间和尺寸,并且运输也非常方便,如图1所示。

图1 秸秆粉碎还田机
秸秆还田的方式有多种,而深埋还田除了具有一般秸秆还田的优点之外,还可以防治农田的水肥流失,对土壤的蓄肥和保温具有重要的作用。秸秆深埋还田装置的主要结构如图2所示。

1.梳压装置 2.连杆机构 3.前滑轮 4.后滑轮 5.提升臂 6.下拉杆 7.上拉杆 8.深埋犁
图2中,梳压结构主要负责把秸秆梳顺,其动力来源于拖拉机,深埋犁通过深翻土,将水稻秸秆进行掩埋,其设计流程如图3所示。
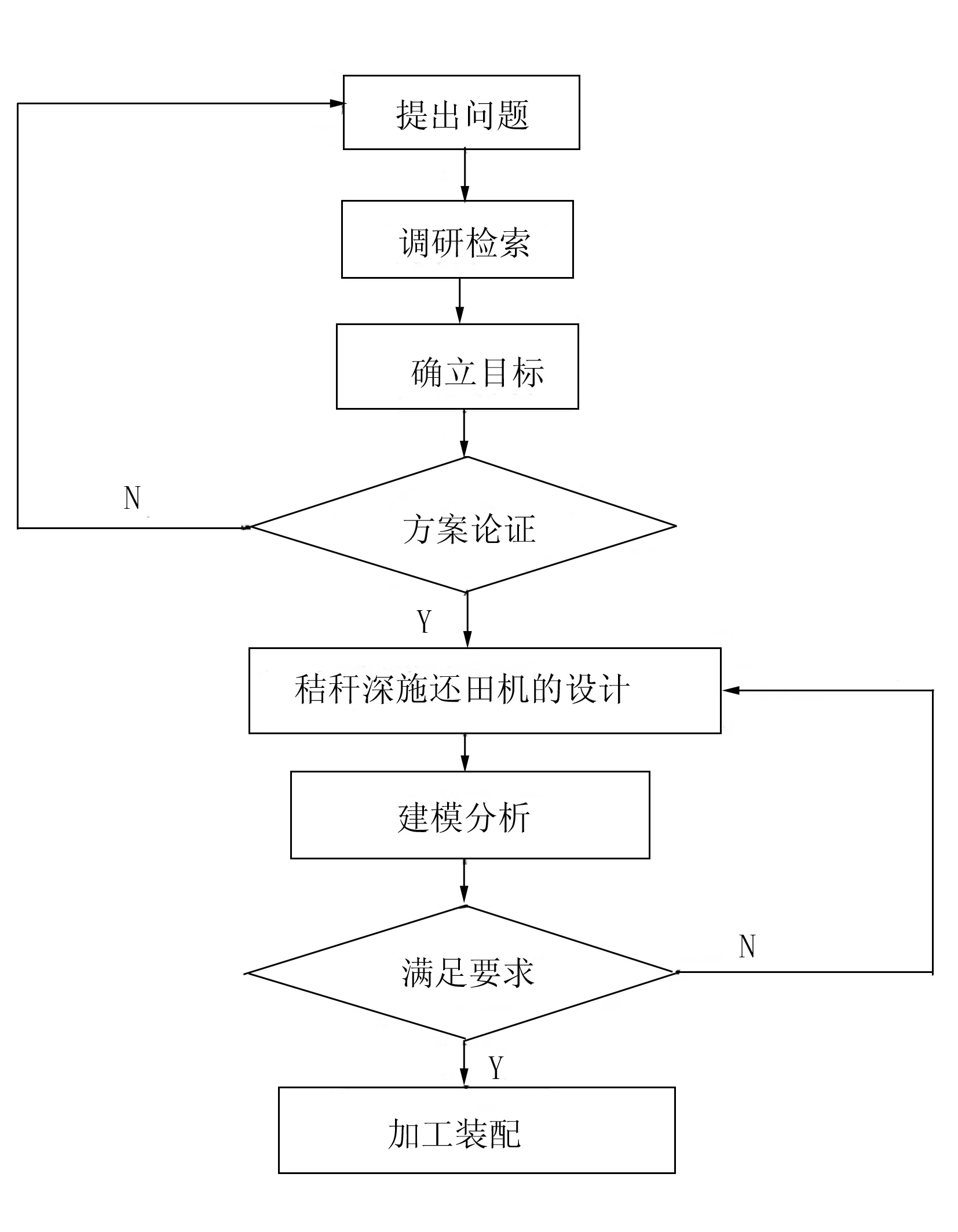
图3 秸秆深埋装置设计技术路线图
设计时,首先需要确立设计目标,然后对装置进行详细设计,利用实验样机对装置进行实验,结合建模仿真分析,验证实验数据的可靠性。在装置的设计过程中,装置性能的好坏主要可以通过土壤对深犁装置的阻力来进行表征,而阻力需要利用传感器来测量,在传感器测量过程中会产生大量的实时数据,针对数据的存储、处理以及后续的查询问题,提出了一种面向物联网海量传感器采样数据管理的数据库集群系统框架。在IoT-ClusterDB中,对于同一个被测试的对象,传感器的历次采样值被保存为采样数据序列,利用时空计算和查询操作,可以支持对数据的复杂逻辑查询。此外,IoT-ClusterDB是一个分布式的大数据系统,可以通过分布式索引和查询,支持关键字和时空查询。
2 秸秆深埋装置结构和强度校核
为了合理的优化秸秆深埋装置的结构和强度,设计了秸秆深埋装置的实验样机,主要由伺服电机、控制柜、导轨、土槽和滑动小车等构成,其主要部件是深埋秸秆的犁刀。整机模型的示意图如图4所示。
试验中,秸秆深施装置安装在滑动小车上,行进的速度可以通过伺服电机的转速进行调节,深度可以通过改变导轨的高度来实现。
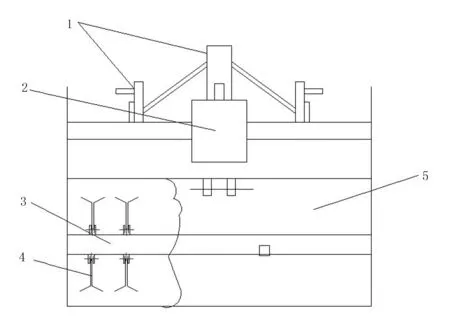
1.悬挂装置 2.变速箱 3.秸秆粉碎滚筒 4.甩刀 5.壳体
在对秸秆深埋装置的结构进行设计时,主要需要对变速箱的齿轮进行校核。齿轮的载荷系数选择kt=1.6,材料的弹性影响系数ZE=189.8,节点区域系数ZH=2.42。根据齿面的硬度,小齿轮的接触疲劳强度极限设计为σHlim1=650MPa,大齿轮的接触疲劳强度极限设计为σHlim2=550MPa。其中,齿轮的接触疲劳寿命系数为KHN1=0.97,KHN2=1.03,安全系数为SH=1,则许用应力的大小为
(1)
(2)
设计时,齿轮的最大应力不能超过许用应力。为了增加设计的可靠性,本研究通过数值仿真模拟的方式对犁刀铲体进行了三维建模。假设铲体的单元应力为u和v,利用虚功原理可以得到单元的刚度矩阵,当应力的状态为平面应力时,单元的应变可以写成
(3)
(4)
假定是各向同性的线弹性材料,对于平面应力状态,有
σ=Dε
(5)
(6)
其中,E为杨氏模量,μ为泊松比。三维建模和装置优化过程如图5所示。

图5 三维建模和装置优化流程示意图
根据试验样机的各种尺寸参数,可以确定虚拟仿真的样机尺寸;然后,根据试验条件对样机施加边界条件,通过模拟计算可以得到铲体受到的阻力;最后,通过与试验数据进行对比,验证数据的可靠性。
3 秸秆深埋装置试验
为了研究秸秆深埋装置设计的影响因素,建立秸秆深埋装置参数优化的数据库系统,设计了秸秆深埋装置的实验平台,秸秆经切碎装置切碎后直接进入深埋装置的秸秆箱里。秸秆深埋是秸秆还田的最后一道工序,深埋犁刀铲体安装在主机架上。试验平台的总体结构如图6所示。

图6 秸秆深埋性能测试试验台
本次试验主要对犁刀铲体的阻力进行测试,力大小主要通过传感器进行采集,然后将传感器和IoT-ClusterDB建立数据接口,实现实验数据的实时分析。试验中使用的传感器如图7所示。

图7 拉压力传感器
该传感器的型号为BLR-1/300,适用范围为动力和静力的测试,具有体积小和测试稳定等优点。拉力传感器测试的结果可以直接存储到IoT-ClusterDB系统中,该系统提供了传感器测试阻力的查询和处理功能,从而提高了整个设计的效率。
为了验证试验的可靠性,设计了仿真模拟作为对照,使用Pro/E5.0软件进行三维建模,并将模型保存为Parasolid(*.x_t)格式,然后导入到ADAMS 软件中进行运动学仿真。犁刀铲体三维模型如图8所示。仿真之前设置了零件和土壤的材料属性,设计了接触运动副,并添加了运动速度。通过仿真计算,得到了犁刀开始运动时的阻力随时间变化曲线,将其和试验值进行对比,得到了如图9所示的结果对比曲线。

图8 犁刀铲体三维模型
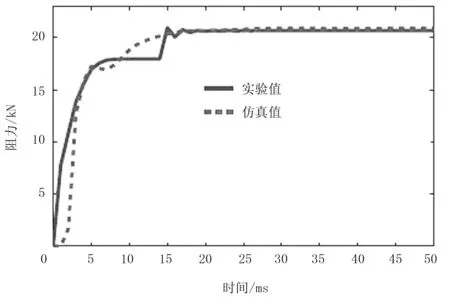
图9 试验和仿真结果对比
由图9可以看出:试验和仿真的结果基本吻合,从而验证了试验的可靠性。秸秆深埋装置作业性能的主要影响因素包括埋深、土壤密度和装置行进速度。为了研究3个因素对装置的影响,利用3个试验因素设计了3水平的正交试验。影响因素的水平如表1所示。
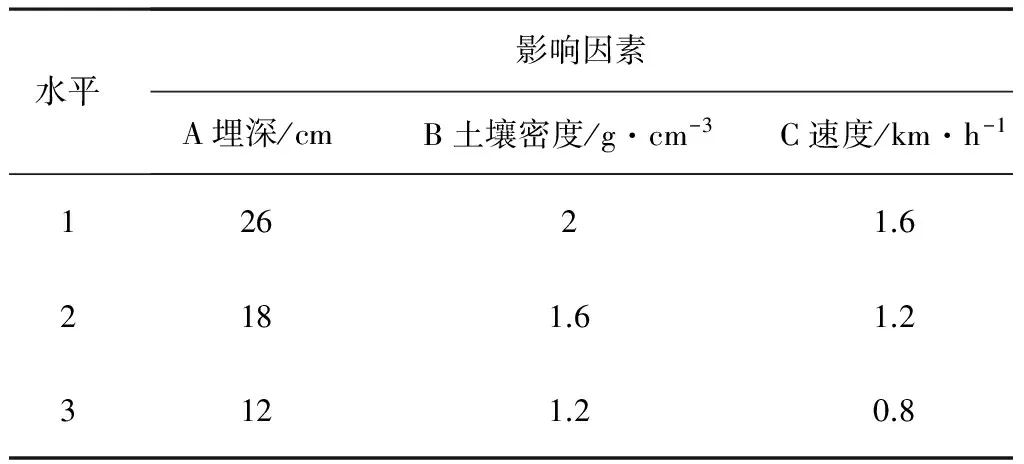
表1 影响因素水平表
表1表示影响秸秆深埋装置性能参数的3个因素,包括埋深、土壤密度和速度。不考虑这3个因素之间的相互作用,通过正交试验,将传感器测得的数据利用IoT-ClusterDB系统进行处理,可以实时得到实验处理结果,如表2所示。

表2 试验结果表

续表2
按照表2所示的试验方案在实验台上进行正交试验,将试验得到的阻力数据填入到表2中。性能指标为阻力数值,阻力的值越小,装置的性能越好。由表2可以看出:
1)对于因素A,埋深12cm时效果最佳;
2)对于因素A,土壤密度1.2g/cm3时效果最佳;
3)对于因素A,行进速度0.8km/h的效果最佳。
3个因素的最佳水平组合为A3B3C3,将试验结果导入IoT-ClusterDB系统,并进行阻力的响应曲面的分析,以提高设计的效率和准确性。
4 结语
针对秸秆深埋还田装置作业水平的影响因素,以埋深、土壤密度和装置行进速度3项作为影响因素,设计了装置性能测试的正交试验。为了有效地采集和保存传感器的数据,将传感器的阻力历次采样值保存为采样数据序列,该方案可以支持对数据的复杂逻辑查询和分布式索引查询,并支持关键字和时空查询。通过试验得到了不同影响因素水平正交试验的装置阻力数值。通过数据采集试验发现:IoT-ClusterDB具有良好的传感器数据接入与查询处理性能。由于时间和计算条件的限制,没有考虑秸秆深埋装置性能的更多影响因素,对于IoT-ClusterDB也没有做更加深入和系统的研究。在后续的研究工作中,可以结合数据库集群框架,得到试验因素对行进阻力的响应曲面,进一步建立装置的优化参数数据库系统,提高装置的设计精度和效率。
[1] 史俊茹,黑敏星,杨军.一种物联网数据管理框架研究[J].计算机科学,2015,10(12):294-298.
[2] 李昕龙,张玲,李坤,等.面向物联网传感器信息的数据分配策略[J].计算机研究与发展,2013,10(15): 297-305.
[3] 张燕.基于物联网海量数据处理的数据库技术分析与研究[J].计算机光盘软件与应用,2014,2(19):97- 99.
[4] 郑孝国.秸秆利用技术与现状分析[J].华章,2012(36): 364.
[5] 曹莹,王秀英,孟军,等.秸秆利用现状及其生物炭化前景探析—以辽宁省彰武县为例[J].作物杂志, 2012(4):9-12.
[6] 谢文艳,樊贵盛,周怀平.秸秆还田方式对旱地玉米产量和水分利用效率的影响[J].农业机械学报,2011, 42(11):60-67.
[7] 慕平,张恩和,王汉宁,等.不同年限全量玉米秸秆还田对玉米生长发育及土壤理化性状的影响[J].中国生态应用学报,2012,20(3):291-296.
[8] 赵伟,陈雅君,王宏燕,等.不同秸秆还田方式对黑土土壤氮素和物理性状的影响[J].玉米科学,2012,20 (6):98-102.
[9] 郑建斌.秸秆还田对水稻产量与土壤性状的研究初探[J].中国农业信息,2012(11):55.
[10] 杨滨娟,钱海燕,黄国勤,等.秸秆还田及其研究进展[J].农学学报,2012,2(5):1-4.
[11] 孔德刚,张超,张帅,等.秸秆深施机单体设计及秸秆深施装置的试验研究[J].东北农业大学学报,2013, 44(2):115-120.
[12] 杨林,杨斌,康金波.SGTN-160 型灭茬旋耕起垄机的研发简介[J].农业机械,2009(6):86-87.
[13] 戴飞,张锋伟,赵春花,等.快速腐熟秸秆还田机设计与试验[J].农业机械学报,2010,41(4):47-51.
[14] 王文明,王春光.弹齿滚筒捡拾装置的研究与发展[J].农机化研究,2012,34(10):221-225.
[15] 王庆惠,王学农,陈发,等.滚刀式秸秆粉碎装置的设计及实验研究[J].新疆农业科学,2012,49(2): 279- 284.
[16] 孔德刚,翟利民,刘立意,等.秸秆深施还田历经时间对蓄水效果的影响[J].东北农业大学学报,2013,44 (5):90-97.
[17] 陈运鹏,龙慧,刘志杰.我国施肥技术与施肥机械的研究现状及对策[J].农机化研究,2015,37(4):255-260.
[18] 姬江涛,郑治华,杜蒙蒙.农业机器人的发展现状及趋势[J].农机化研究,2014,36(12):1-4.
[19] 乔永亮,何东键,赵川源,等.基于多光谱图像和SVM的玉米田间杂草识别[J].农机化研究,2013,35(8):30-34.
[20] 姬长英,周俊.农业机械导航技术发展分析[J].农业机械学报,2014,45(9):44-54.
[21] 孟庆宽,何洁,仇瑞承,等.基于机器视觉的自然环境下作物行识别与导航线提取[J].光学学报,2014,34(7): 1-7.
[22] 刘金龙,郑泽锋,丁为民,等.对靶喷雾红外探测器的设计与探测距离测试[J].江苏农业科学,2013,41(7): 368-370.
[23] 傅锡敏,薛新宇.基于我国施药技术与装备现状的发展思路[J].中国农机化,2008(6):72-76.
[24] 傅泽田,祁力钧,王俊红.精确施药拉术研究进展与对策[J].农业机械学报,2007,38(1):189-192.
[25] 胡炼,罗锡文,曾山,等.基于机器视觉的株间机械除草装置的作物识别与定位方法[J].农业工程学报,2013,29(10):12-18.
Design of Deep Buried and Whole Straw Returning Device of Rice Straw Based on Database Cluster System
Hu Jufen, Yin Qiangfei
(Jiangxi Modern Ploytechnic College,Nanchang 330095,China)
Crop straw returning to the field can improve the soil properties, enhance the soil fertility, and then increase the yield of crops.In order to improve the performance of the deep buried device of rice straw, the performance and operating parameters of the device were studied. The orthogonal test was designed to test the performance of the device, and the resistance of the device was tested on the experimental platform. In order to effectively collect and store the data of sensors, a database cluster system framework (IoT-ClusterDB) is proposed, which is based on data management of mass sensor sampling data. The resistance of sensor is saved as a sampling data sequence. It can support complex logical query and query of distributed index, and supports keywords and spatio-temporal query. The experimental results show that the IoT-ClusterDB has good sensor data access and query processing performance, thus reducing the whole design cycle of the straw deep buried device and improving the design efficiency.
rice; straw returning; database cluster; data sequence
2015-12-11
江西省教育厅科技项目(2015GZ0455)
胡菊芬(1979- ),女,江西修水人,副教授,硕士。
尹强飞(1982- ),男,江西永新人,副教授,硕士,(E-mail)strongflyok@sina.com。
S224.29
A
1003-188X(2017)02-0094-05
