基于光照的温室加热系统模糊PID控制
2017-12-16左志宇秦丽娟毛罕平吕天远卓敏敏
左志宇,秦丽娟,毛罕平,吕天远,卓敏敏,谭 洁
(1.江苏大学 a.农业装备工程学院;b.农业工程研究院;c.现代农业装备与技术教育部重点实验室,江苏 镇江
基于光照的温室加热系统模糊PID控制
左志宇1a,1b,秦丽娟1a,毛罕平1c,2,吕天远3,卓敏敏4,谭 洁4
(1.江苏大学 a.农业装备工程学院;b.农业工程研究院;c.现代农业装备与技术教育部重点实验室,江苏 镇江
212013;2.江苏省现代农业装备与技术协同创新中心,江苏 镇江 212013;3.江苏省农业装备与智能化高技术研究重点实验室,江苏 镇江 212013;4.江苏省农业装备与技术国家重点实验室培育点,江苏 镇江 212013)
为了给冬季作物提供适宜的生长环境,综合考虑自然光和节能因素,提出了一种基于光照的温室加热系统模糊PID控制方法。首先,根据温室的光照强度和天气预报信息,建立温室内温度的设定模型;然后,结合常规PID控制算法简单、鲁棒性好及可靠性的优点,采用模糊控制思想对PID控制参数进行调整,使控制系统可以依据不同的偏差相应地调整;最后,使用MatLab中Simulink对控制算法进行了仿真试验。结果表明:该控制方法稳定性高、动态响应好、抗干扰能力强,为提高温室生产的经济效益提供了理论依据。
温室;光照强度;模糊算法;加热系统;PID控制
0 引言
温室生产的目的是通过为作物提供适宜的环境,实现作物正常的生长发育,同时尽量降低生产成本。在我国大部分地区,冬季环境温度相对较低,不能满足作物生长的需求。为了保证作物冬季的正常生长发育,通常需要对温室进行加温。
温室内温度值的设置和控制方法对作物生长和温室运行成本的投入影响非常大。如何对温度设定值进行决策和控制,已成为温室环境控制技术的研究热点之一。Marsh等建立了白天温室温度与作物所处的日照阶段、生长期等之间的函数关系,得到作物所需的最佳温度,加温费用节省了10%~30%[1]。李志伟等将作物生长发育1天所需的温度划分为若干个阶段,实现温室环境的动态优化调控[2]。已有研究表明:根据自然光照调控温室系统的温度,可以在投入和产出之间取得较好的平衡[3-6]。温室是一个非常复杂的非线性系统,环境因子间存在相互作用,难以建立精确的数学模型。模糊控制技术根据人类思维的模糊性建立的模糊逻辑控制器,不需要建立精确的数学模型[7]。本文提出根据光照条件确定温度设定值,并采用模糊控制思想对PID控制参数进行调整,从而实现充分自然光,精确控制室内温度,降低环境控制成本和生产能耗。
1 白天温室冬季温度控制
1.1 不同天气状况下光照强度变化规律
试验时间为2015年12月-2016年2月,试验地点为江苏大学农业装备工程学院的Venlo型玻璃温室。从温室环境监控平台数据库中调出冬季的环境参数数据,分别选出晴天和阴雨天等典型天气对应的光照数据,并进行整理分析,得到晴天和阴雨天每时段的平均光照值,如表1和表2所示。
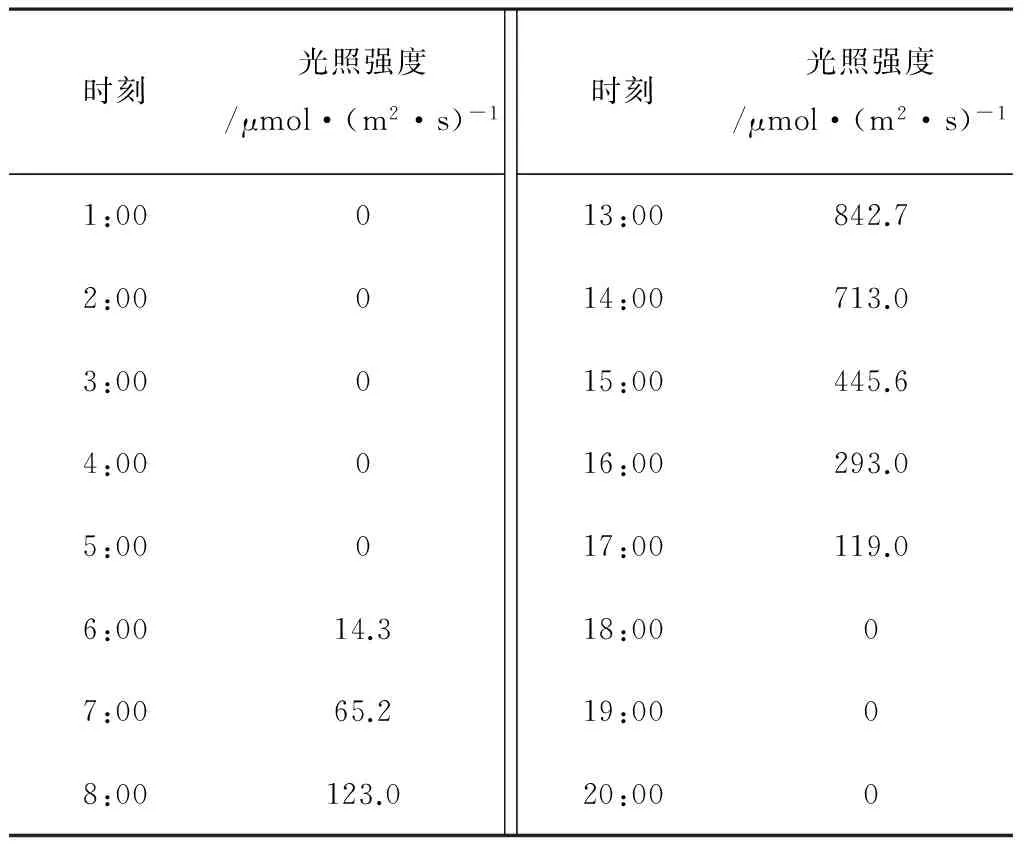
表1 晴天典型光照强度统计数据
续表1

表2 阴雨天典型光照强度统计数据
1.2 基于光照强度的温度设定值的确定
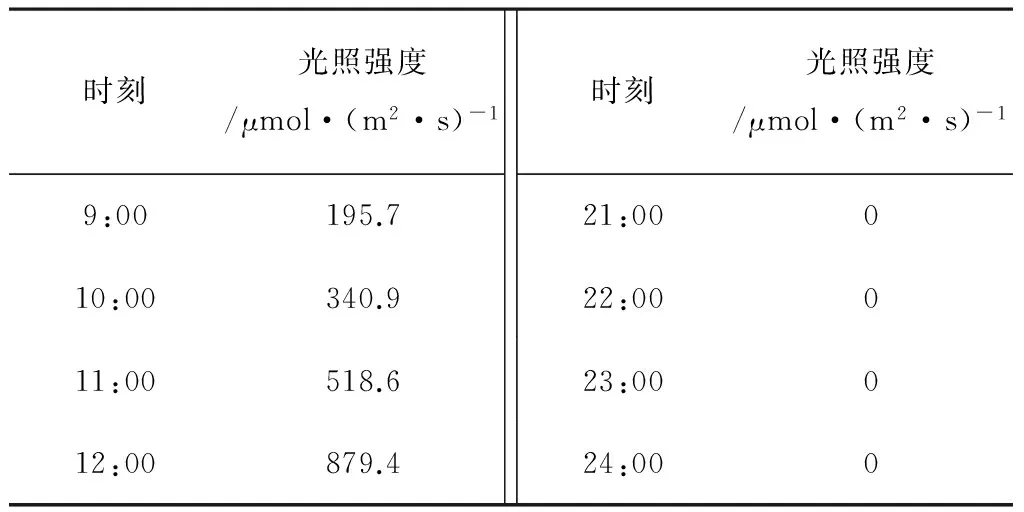
不同光照条件下番茄的光合速率与温度的关系曲线如图1所示。
图1 不同光照条件下番茄光合速率与温度的关系
从图1中可以看出:在同样的温度条件下,光照强度增大时,光合速率也增大;在同样的光照强度下,光合速率随着温度的升高而增大,但到达最大值后,如果温度继续升高,光合速率下降;光照强度从100μmol/(m2·s)增大到1450μmol/(m2·s)时,光合速率最大时对应的温度值相应地从22℃增大至29℃。
在进行温室环境调控的过程中,可以根据温室内光照强度动态调节温度的设定值,使其达到最大光合速率。根据图1中不同光照强度条件下净光合速率和温度间关系,回归拟合出光照强度和对应的最适温度值关系式,即
Ti=3.5225Ln(LQi)+4.1479
(1)
其中,Ti为i时刻光照情况下作物实现最大光合速率时对应的温度值(℃);LQi为i时刻光照强度[μmol/(m2·s)]。
从图1中可以看出:在光合速率曲线最高点的两侧,番茄的光合速率的变化并不大,适宜温度的范围较宽,在弱光的条件下更宽。因此,在进行调控过程中,并不是一定要将温室内的温度调节到作物的最佳生长点,而是设定在光合速率的允许变化幅度范围之内即可,则
TSi=[Ti-ΔT,Ti+ΔT]
(2)
其中,TSi为i时刻光合速率允许变化幅度范围内时对应的温度变化范围(℃);ΔT为温度的允许波动范围(℃),此处取值为2℃。
结合天气预测信息,确定当天天气状况。针对温室温度具有大滞后、强惯性等特点,采用前馈控制,即在分析当时的光照强度后,结合天气预报的天气状况下的光照强度统计数据表(表1或表2),查表得出下一时段(1h)光照强度值,并以此光照强度进行温度控制目标的设定,计算方法为
(3)
其中,LQSi为i时刻查表1或表2对应的光照强度[μmol/(m2·s)];LQS(i+1)为(i+1)时刻查表1或表2对应的光照强度[μmol/(m2·s)]。
2 夜间温度设定值确定
已有研究表明:作物在夜间呼吸作用强度与植株的生物量成正比,同时对温度比较敏感,呈指数变化;番茄在30℃以下呼吸强度随温度的增加而增加[8-9]。
因此,在进行温室温度调控时,应尽量抑制作物的呼吸。考虑到昼夜温差对番茄生长有较大影响,要求昼夜温差保持在一定的范围内。研究表明:昼夜温差控制在6℃(4~10℃)左右最有利于番茄的生长[8-9]。在满足昼夜温差的前提下,为了确保有机物的正常运输,前半夜的温度可以高于后半夜。
夜间温度采用时段法计算,即将夜间时段tnight分成3个时间段(i=1,2,3),i=1时表示日落后,即t1= 0.2tnight,这一阶段主要实现光合产物的有效运输;i=2时,t2= 0.4tnight,该阶段主要是光合产物运输结束,转向抑制呼吸消耗阶段;i=3时,t3= 0.4tnight,该阶段主要是抑制作物呼吸作用,减少光合产物的消耗。利用温度变化因子Tfac及夜间平均温度来计算夜间第i个时段的温度设定值Ti,如式(4)~式(7)所示。这样既保证了昼夜温差,也有益于有机物的运输和减少呼吸作用的消耗。
(4)
tnight=24-tday
(5)
Tfac(i)=0.05i2-0.35i+1.5 (i=1,2,3)
(6)
Ti=Tfac×Tnight
(7)
其中,Tday为白天温度值;Tnight为夜间平均温度值;tday为白天时间长度(h);tnight为夜间时间长度(h);Ti为夜间温度设置值。
3 模糊PID控制器
3.1 模糊PID结构
模糊PID控制关系为
(8)
模糊PID选择双输入-三输出的模糊控制器,以偏差e和偏差变化率ec为输入,利用模糊控制原理对作为输出的3个PID参数Δkp、Δki和Δkd进行实时在线调整,以满足不同偏差e及偏差变化率ec对控制器参数的不同要求,从而使控制系统具有良好的动态、静态性能,结构原理如图2所示。

图2 模糊PID结构原理图
3.2 模糊PID控制器的设计
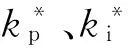
模糊PID控制器的输入(e、ec)和输出(Δkp、Δki、Δkd)5个参数对应的模糊子集均定义为{NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)}。控制器输入e和ec的变化范围对应在模糊集合上的论域是:[-3,3],Δkp、Δki和Δkd为[-6,6]。e和ec的隶属函数是采用灵敏度高的等腰三角函数,Δkp、Δki和Δkd的隶属函数采用的是高斯函数。为了保证控制系统具有良好的稳定性能,对e的隶属函数进行了不规则化,在e接近0附近提高了灵敏度,对应的隶属函数分布如图3所示。
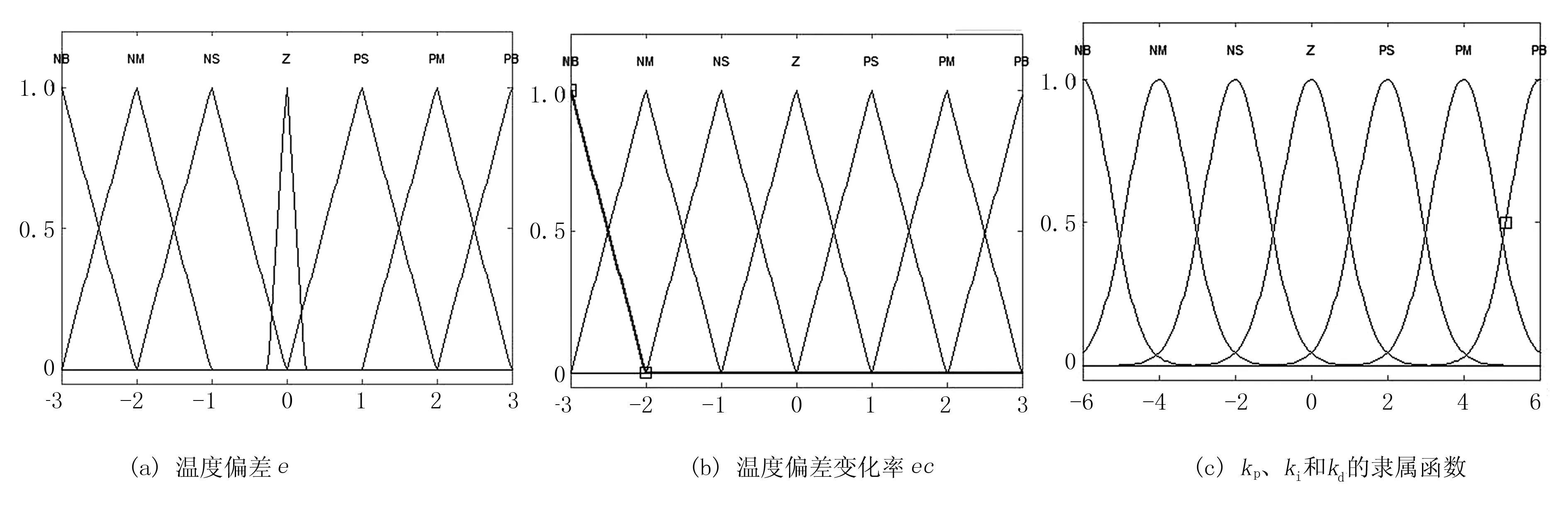
图3 模糊PID控制器的隶属度函数
控制规则是进行模糊推理的重要依据,也是模糊控制器的核心。根据农作物的生长规律,并结合专家经验找出PID这3个参数与e和ec之间的关系,构造出模糊控制规则。
4 温室温度控制系统仿真
为了验证算法在理论上的可行性及有效性,本研究使用MatLab进行仿真试验。根据番茄的生长规律,综合考虑经济效益以及能源节约等因素,试验中采用结合光照的动态变温控制方式。温室采用热风机加热器进行环境加热的调控,根据文献[11]对试验数据进行回归分析所得到的温室环境调控效果模型[如式(9)]和调控成本模型[如式(10)],并对调控效果模型进行拉氏变换得式(11),以便于后期求解系统的输出和确定系统的传递函数。
Tt=Ti+0.1086×t×e0.0626t
(9)
(10)
(11)
其中,Tt为t时刻对应的温度值;Ti为温度初始值;P为执行机构条件下的总调控成本(元);pi(i=1,2,...,6)为间隙式执行机构动作单次调控成本,(i=7,8,9)为连续型执行机构单位时间内的调控成本;ki为执行机构的状态,0表示机构动作未执行,1表示机构动作执行,t表示执行机构动作的时间(min)。
考虑到作物的光合作用和光强的关系,白天控制系统将根据光强进行温室温度的动态调控;考虑到前半夜作物体内物质的运输,将温度设置在18℃;后半夜以尽量抑制呼吸作用的消耗为目的,温度设置为15℃。
运用MatLab中的Simulink搭建如图4所示的模型进行仿真。
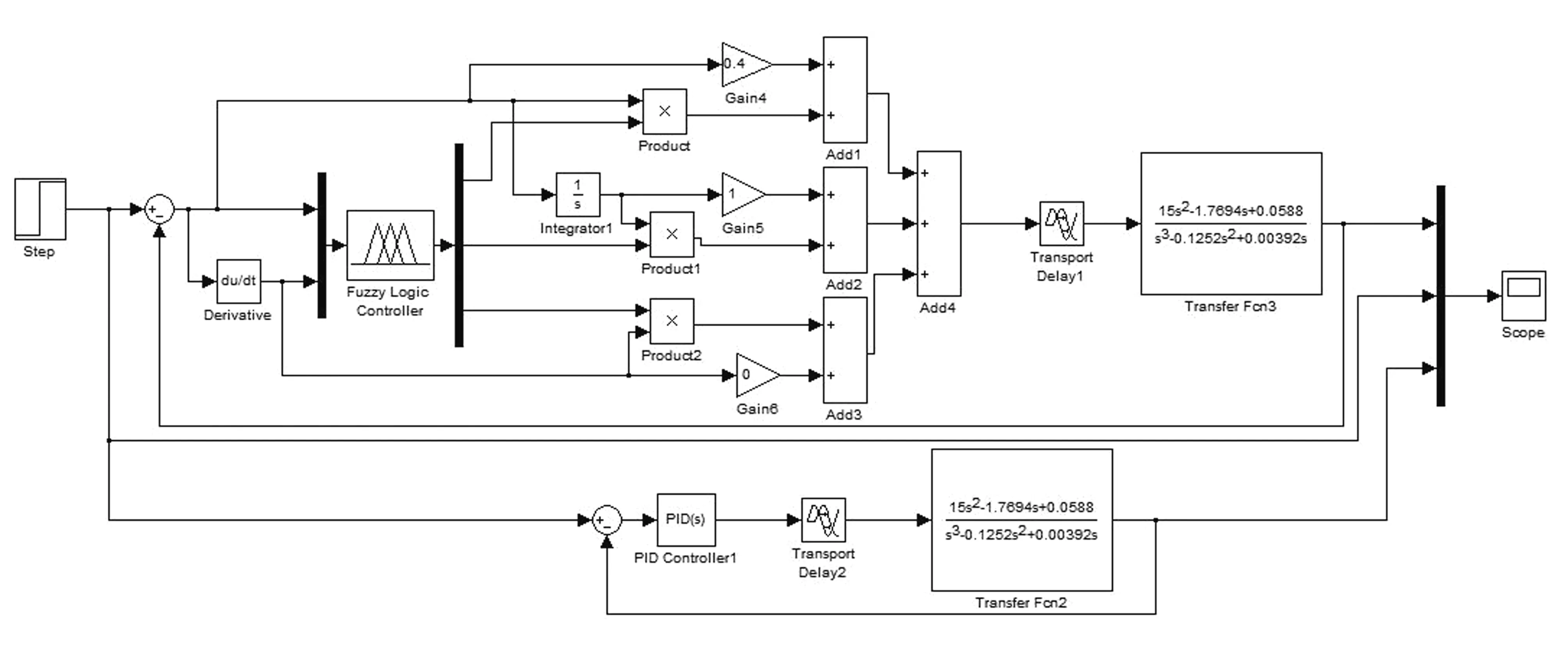
图4 模糊PID控制器的仿真框图
在阶跃信号的作用下,被控系统响应曲线如图5所示。从图5可以看出:与常规PID控制方法相比,模糊PID控制具有稳定性更好、响应速度更快、过渡时间更短的优势。
图5 阶跃信号下被控系统的响应曲线
多阶段不同温度设定值的温度跟踪曲线如图6所示。
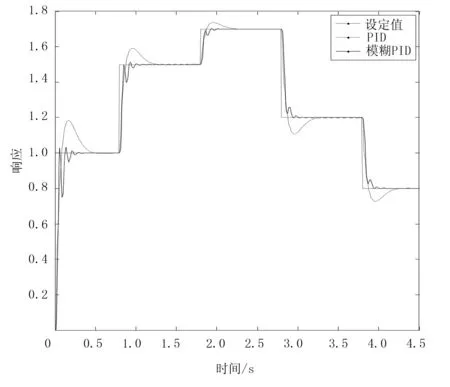
图6 不同PID控制下的温度跟踪曲线
从图6中可以看出:模糊PID控制系统能较好地抑制温度的强烈波动,在温度分阶段控制时基本上能实现温度控制系统无静差追踪,满足抗干扰性强、鲁棒性好自调整能力强等优点。
本文针对的是温室冬季加热系统的控制,考虑到加热风机为连续型执行机构,式(10)中温室环境调控成本模型可简化为
P=(k7p7+k9p9)t
(12)
由式(12)可知:常规PID控制和模糊控制下的成本消耗均与加热时间直接相关。由图6中仿真结果可知:模糊PID控制下的加热时间是常规PID控制下的50%,对应的能耗也降低了50%,由此验证了使用模糊PID控制温室冬季加热系统的高效性。
5 结论
提出了一种基于光照的温室加热系统控制方法,并采用模糊PID算法进行加热系统的控制。通过MatLab中Simulink仿真与分析表明:基于光照的模糊PID控制较基于光照的PID控制,具有较强的鲁棒性与自调整性,取得良好的控制效果。该控制方法充分利用自然光对温度进行动态调整,改善了控制系统的动静态性能,提高了温室生产的经济效益。
[1] Marsh L S,Albright L D.Economically optimum day temperatures for greenhouse hydroponic lettuce production part II. Results and simulations[J]. Transactions of the ASAE, 1991, 34(2):557-562.
[2] 李志伟, 王双喜, 高昌珍, 等. 以温度为主控参数的日光温室综合环境控制系统的研制与应用[J]. 农业工程学报, 2002,18(3):68-71.
[3] Aaslyng J M, Lund J B, Ehler N, et al. IntelliGrow: a greenhouse component-based climate control system[J].Environmental Modeling & Software, 2003,18(7):657-666.
[4] 王纪章, 李萍萍, 毛罕平, 等.基于模型的温室环境调控技术研究[J]. 沈阳农业大学学报, 2006, 37(3):463-466.
[5] 郭晓刚, 夏颖. 模糊控制在温室控制系统中的应用[J].长春工业大学学报: 自然科学版, 2013, 34(1):50-54.
[6] 张志宏. 基于WSN的坝上温室光照度控制系统设计[J].湖北农业科学, 2016(2):486-489.
[7] 杨卫中, 王一鸣, 李海健. 温室温度模糊控制参数在线自整定算法[J]. 农业机械学报, 2005, 36(9):79-82.
[8] 毛丽萍, 李亚灵, 温祥珍. 苗期昼夜温差对番茄产量形成因子的影响分析[J]. 农业工程学报, 2012, 28(16):172-177.
[9] 杨再强, 王学林, 彭晓丹, 等. 人工环境昼夜温差对番茄营养物质和干物质分配的影响[J].农业工程学报, 2014,30(5):138-147.
[10] 王纪章, 李萍萍, 毛罕平. 基于作物生长和控制成本的温室气候控制决策支持系统[J]. 农业工程学报, 2006, 22(9):168-171.
[11] 刘文定,王东林. MATLAB/Simulink与过程控制系统[M]. 北京:机械工业出版社,2012.
Fuzzy PID Control of Greenhouse Winter Heating System Based on Illumination
Zuo Zhiyu1a,1b, Qin Lijuan1a, Mao Hanping1c,2, Lv Tianyuan3, Zhuo Minmin4, Tan Jie4
(1.Jiangsu University a.School of Agricultural Equipment and Engineering;b.Institute of Agricultural Engineering;c.Key Laboratory of Modern Agricultural Equipment and Technology (Jiangsu University) ,Ministry of Education, Zhenjiang 212013, China;2.Synergistic Innovation Center of Modern Agricultural Equipment and Technology of Jiangsu Province, Zhenjiang 212013, China;3.High-tech Key Laboratory of Agricultural Equipment and Intelligence of Jiangsu Province, Zhenjiang 212013, China;4.Nursing Base of State-key Laboratory of Modern Agricultural Equipment and Technology Designated by Jiangsu Province, Zhenjiang 212013, China)
In order to provide a suitable growth environment for winter crop, a novel fuzzy PID control method for greenhouse heating system based on light was proposed by taking the natural light and energy-saving factors into consideration. Firstly, the temperature setting model for greenhouse was established according to the light intensity in greenhouse and weather information. Owing to the advantages of conventional PID control algorithm, which is simple, robustness and reliability, this paper then adjusted PID control parameters by combining with PID control. This kind of control system could be adjusted depending on the deviation.Finally, Simulink in Matlab was applied to do control algorithm simulation.Simulation results showed that the proposed control method was high stability, good dynamic response and strong anti-jamming capability, which could provide a theoretical basis for improving the economic benefits of greenhouse production.
greenhouse; light intensity; fuzzy algorithm; heating system; PID control
2016-07-22
国家科技支撑计划项目(2014BAD08B03);国家自然科学基金重点项目(61233006);国家自然科学基金资助项目(31201659);江苏省重点研发项目(BE2015347);江苏省农业科技自主创新资金项目(CX(15)1033);江苏高校优势学科建设工程资助项目(2014-2017);江苏政府留学奖学金(2013-2016)
左志宇(1977-),男,湖南湘乡人,副教授,博士研究生,(E-mail)zuozy@ujs.edu.cn。
S625.4;S24
A
1003-188X(2017)06-0214-05
