新型香蕉种植开坑机的结构设计与空间分析
2017-12-16娄玉印刘光浩王莎莎
娄玉印,黄 伟,刘光浩,王莎莎,毕 伟
( 1.广西科技大学鹿山学院,广西 柳州 545000;2.广西大学 机械工程学院,南宁 530004;3.柳州职业技术学院,广西 柳州 545000)
新型香蕉种植开坑机的结构设计与空间分析
娄玉印1,黄 伟2,刘光浩3,王莎莎2,毕 伟2
( 1.广西科技大学鹿山学院,广西 柳州 545000;2.广西大学 机械工程学院,南宁 530004;3.柳州职业技术学院,广西 柳州 545000)
基于目前香蕉种植作业方式落后及种植开坑机研制缺乏的现状,研发了一种连杆式可控三自由度香蕉种植开坑机。首先,介绍了新型香蕉种植开坑机的机构原理和结构特点;其次,根据新型香蕉种植开坑机的雅可比矩阵进行奇异性分析,并得出其结构奇异位型;再次,根据数学理论隐含数存在的条件,分析计算新型香蕉种植机结构工作空间的边界条件,得出香蕉开坑机的工作空间;最后,运用MatLab软件仿真模拟仿真,得出香蕉开坑机输出点的空间图形。该分析验证了香蕉种植开坑机的可行性和可靠性,具有一定的推广价值。
种植开坑机;奇异性;空间分析;仿真模拟
0 引言
基于香蕉种植开坑机机械研制缺乏及香蕉种植作业劳动力强度大、劳动方式原始落后、劳动效率低的现状,研制了一种新型可控三自由香蕉种植开坑机,具有结构简单、工作效率及可靠度高的特点。
本文首先介绍了新型香蕉种植开坑机的结构特点和机械原理;其次,根据新型香蕉种植开坑机的雅可比矩阵进行奇异性分析,并得出其结构奇异位型[1];再次,根据数学理论隐含数存在的条件,分析计算新型香蕉种植机结构工作空间的边界条件,得出香蕉开坑机的工作空间;最后,运用MatLab软件仿真模拟仿真,得出香蕉开坑机输出点的空间图形[2]。该分析对新型香蕉种植开坑机的研发起到一定的积极作用。本文分析验证了该新型香蕉种植开坑机的可行性和可靠性,具有一定的推广价值。
1 结构介绍
本新型可控连杆式香蕉种植挖坑机包括行走机构、动力驱动机构、垂直度调节机构及挖坑机构,如图1所示。
行走机构选用独立的柴油机作为动力,不受使用地点的限制,对不同坑深要求、地形变化和土壤硬度等条件均能具有较强的适应性。动力驱动机构包括电动机3、第5连杆、第6连杆及动臂;垂直度调节机构包括电动机1、第1连杆、第2连杆、第3连杆及第4连杆;挖坑机构包括电动机2及螺旋刀盘。电动机3控制挖坑机构的上下运动;电动机1控制挖坑机构垂直度,保证挖坑质量;电动机2带动刀盘做螺旋运动,完成挖掘作业。该香蕉种植挖坑机具有自动挖坑、挖坑垂直度好、结构可靠、稳定性好、噪声小、效率高、适应性强且移动方便等特点,易于推广使用。
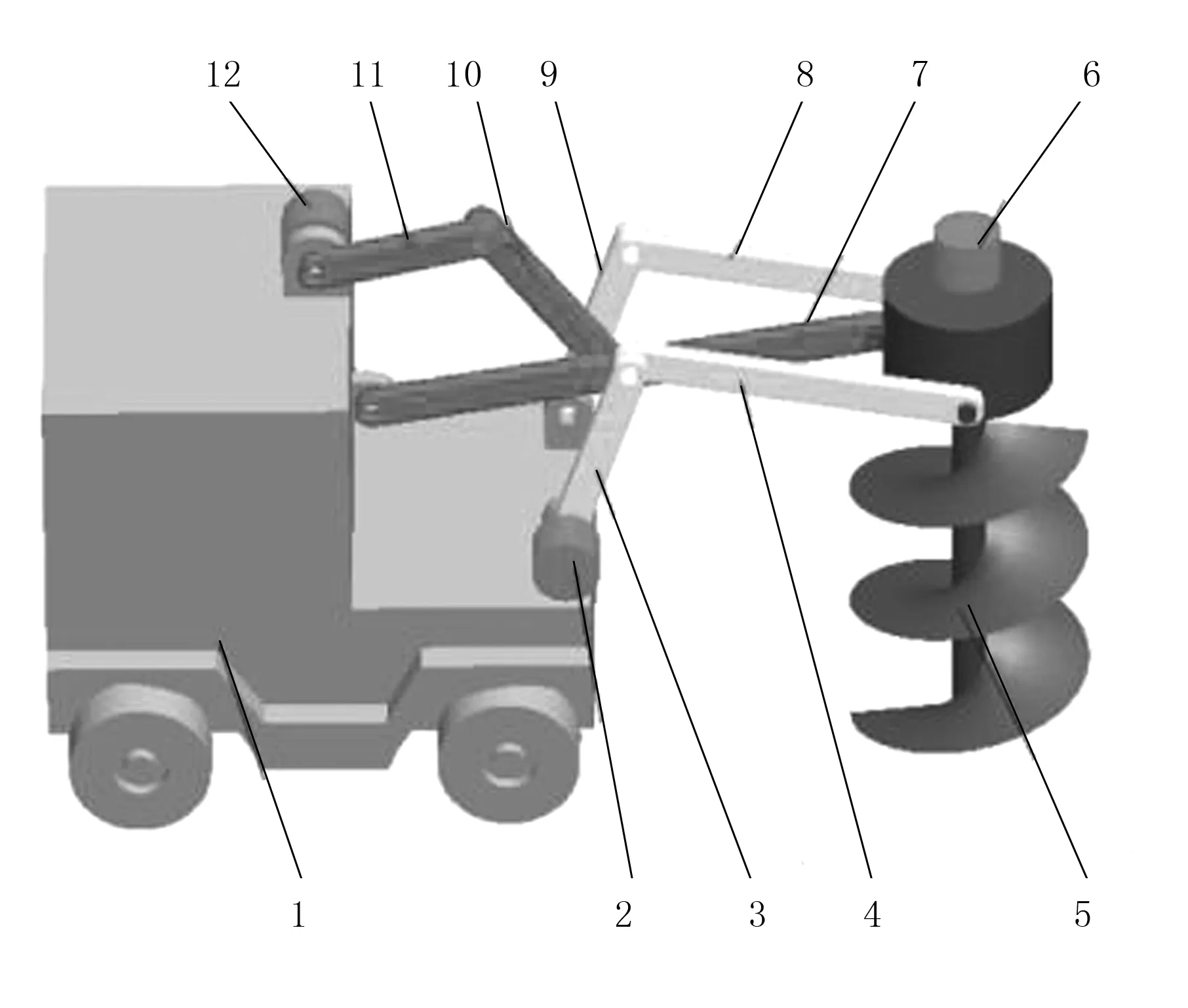
1.行走机构 2.电动机1 3.第1连杆 4.第2连杆 5.螺旋刀盘 6.电动机2 7.动臂 8.第3连杆 9.第4连杆 10.第5连杆 11.第6连杆 12.电动机3图1 可控香蕉种植开坑机结构图
2 新型香蕉种植开坑机的奇异性分析
2.1 新型香蕉种植开坑机结构简图
该新型香蕉种植开坑机可简化为五杆机构和四杆机构的组合[3-4],其结构简图如图2所示。
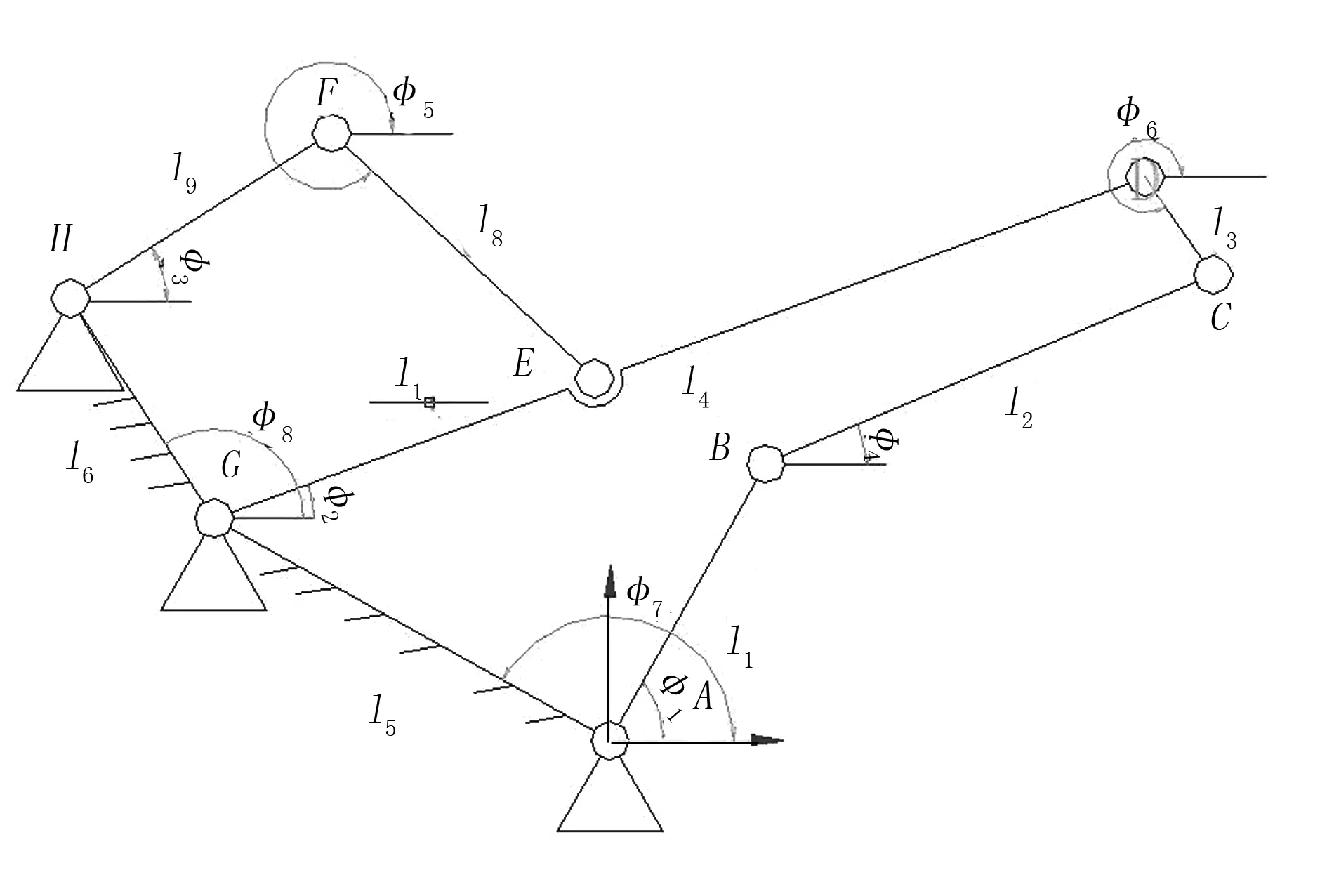
图2 新型香蕉种植开坑机的结构简图
2.2 五杆机构ABCDG奇异性分析
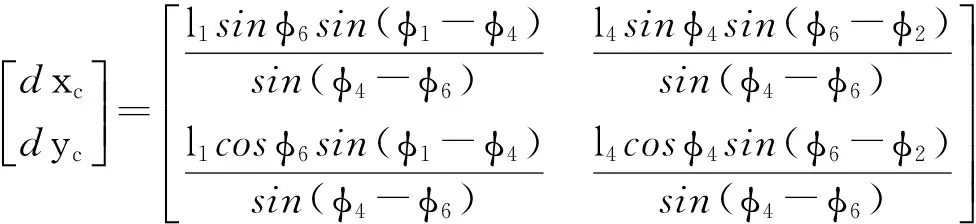
在五边形ABCDG中,C点的坐标为[5]
(1)
对公式(1)求导得
(2)
五杆机构ABCDG约束方程为
(3)
对公式(3)微分得
(4)
(5)
将式(4)、式(5)带入式(1)得
(6)
五杆机构ABCDG雅可比矩阵为

当det(J)=0时,则
1)φ1=φ4,其结构如图3所示。

图3 香蕉种植开坑机奇异性1
2)φ1=φ4+π,其结构如图4所示。

图4 香蕉种植开坑机机构奇异性2
3)φ6=φ2,其结构如图5所示。

图5 香蕉种植开坑机机构奇异性3
4)φ6=φ2+π,其结构如图6所示。

图6 香蕉种植开坑机机构奇异性4
当det(J)=∞时,有
1)φ4=φ6,其结构如图7所示。

图7 香蕉种植开坑机机构奇异性5
2)φ4=φ6+π,其结构如图8所示。

图8 香蕉种植开坑机机构奇异性6
2.3 四杆机构GHFE奇异性
四杆机构GHFE约束方程为[6-7]

2l9l8cosφ3)cosφ5-2l9l8sinφ3sinφ5=0
(7)
对公式(7)求导微分得

(8)
四杆机构GHFE中E点的坐标为
(9)
对公式(9)求导得
(10)
将公式(10)改写为
(11)
其中
J=
当雅可比矩阵J为0或无穷大时,则
1)φ3=φ5,其结构如图9所示。
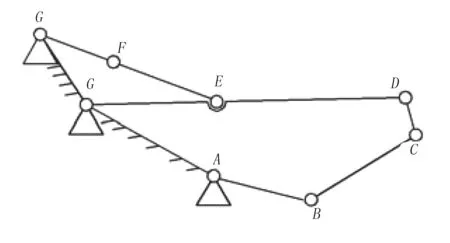
图9 香蕉种植开坑机机构奇异性7
2)φ3=φ5+π,其结构如图10所示。
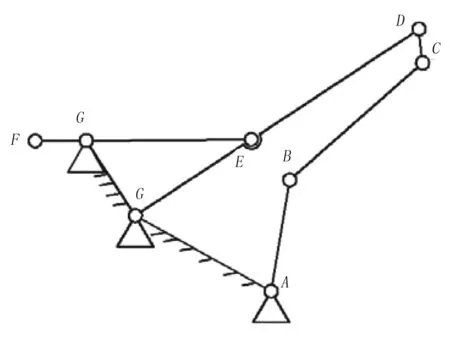
图10 香蕉种植开坑机机构奇异性8
3 新型香蕉种植机工作空间分析
3.1 五杆机构ABCDG的工作空间分析
五杆机构在五边形ABCDG中,如图11所示[8]。
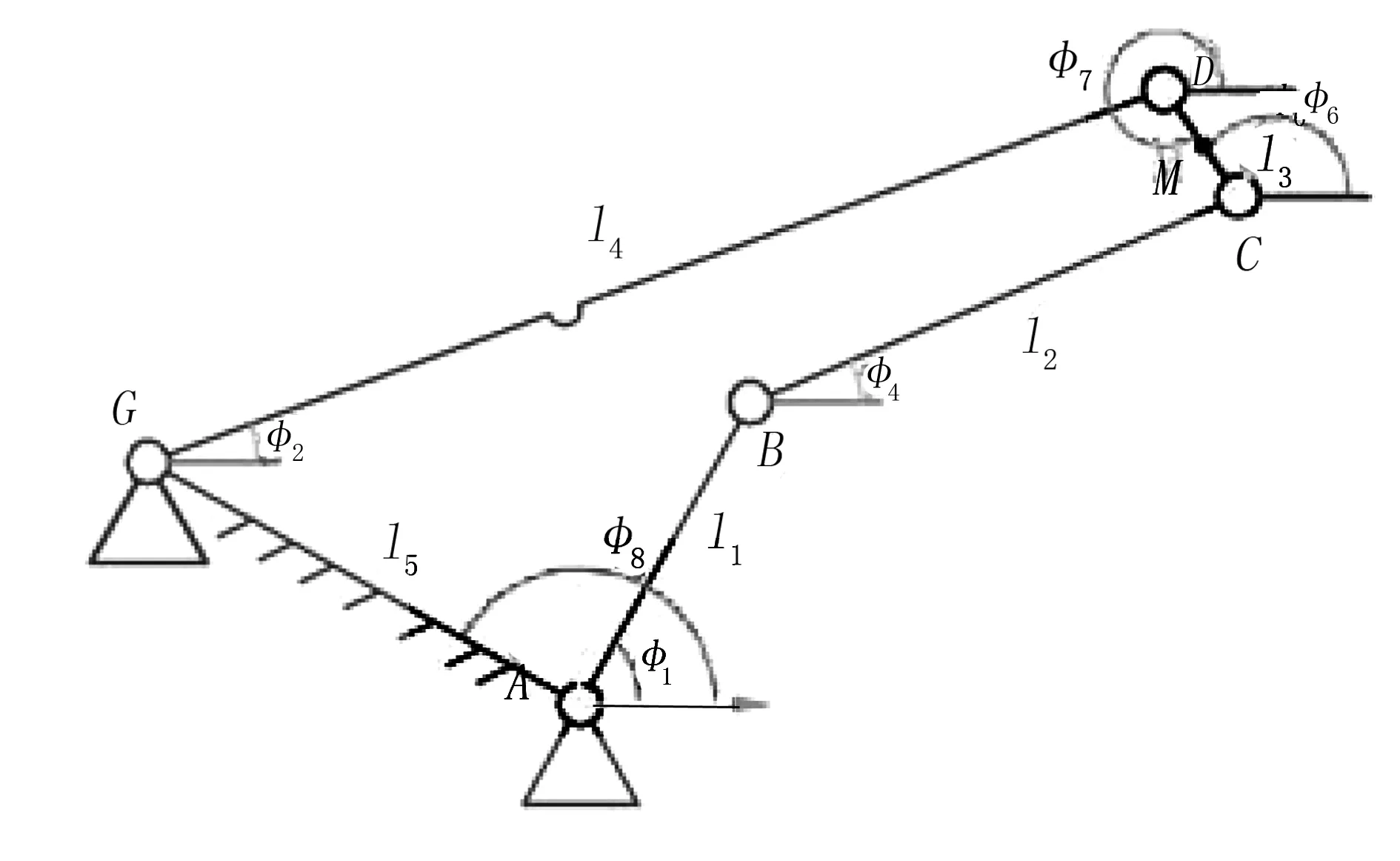
图11 新型香蕉种植机五杆机构BCDG
其中,M点坐标为
(12)
五杆机构满足公式(13),则
(13)
φ4、 φ6是关于φ1、φ2的函数,即
(14)
将公式(14)带入公式(12)得
(15)
构造函数为
(16)
根据隐含数存在的条件可得
(17)
对公式(12)微分得

相比之下,OM-D E-M1 II在参数上略逊G9,而且缺乏了重要的60fps 4K视频拍摄能力。不过,我们仍然认为E-M1 II是一台更加适合摄影爱好者的相机。它小巧的机身具备绝佳的便携性。奥林巴斯出色的定焦镜头群是这台相机的绝配,完全可以满足日常拍摄需求。而当你需要拍摄运动、野生动物题材时,这款相机也可以做得极为出色。考虑到大多数用户的使用习惯,我们认为E-M1 II是更好的那一台。
(19)
由公式(18)和公式(19)得
(20)
整理公式(20)得
(21)
化简公式(21)得
由上述公式得
(23)
当公式(23)为0时,φ1=φ2,φ2=φ6+π。
3.2 四杆机构EFGH的工作空间分析
四杆机构的结构简图如图12所示。
四杆机构EFGH中D点的坐标为
(24)
对公式(24)求导得
(25)
φ2和φ3之间的关系为
2l6l9cosφ3-2l6l7cos(φ8-φ2)-
2l9l7cos(φ3+φ2-φ8)=0
(26)
对公式(26)微分得

(27)
将公式(27)带人公式(25)得
(28)
输出点D点的坐标可表示为
(29)
由公式(29)构造函数为
(30)
根据隐函数存在的定理得[9]
(31)
即
(32)
确定D(xD,yD)=0的工作边界条件为
l6sinφ3-l7sin(φ3-φ8+φ2)=0
(33)
4 仿真分析
运用MatLab仿真分析软件对新型香蕉种植开坑机输出点M进行仿真,如图13所示。
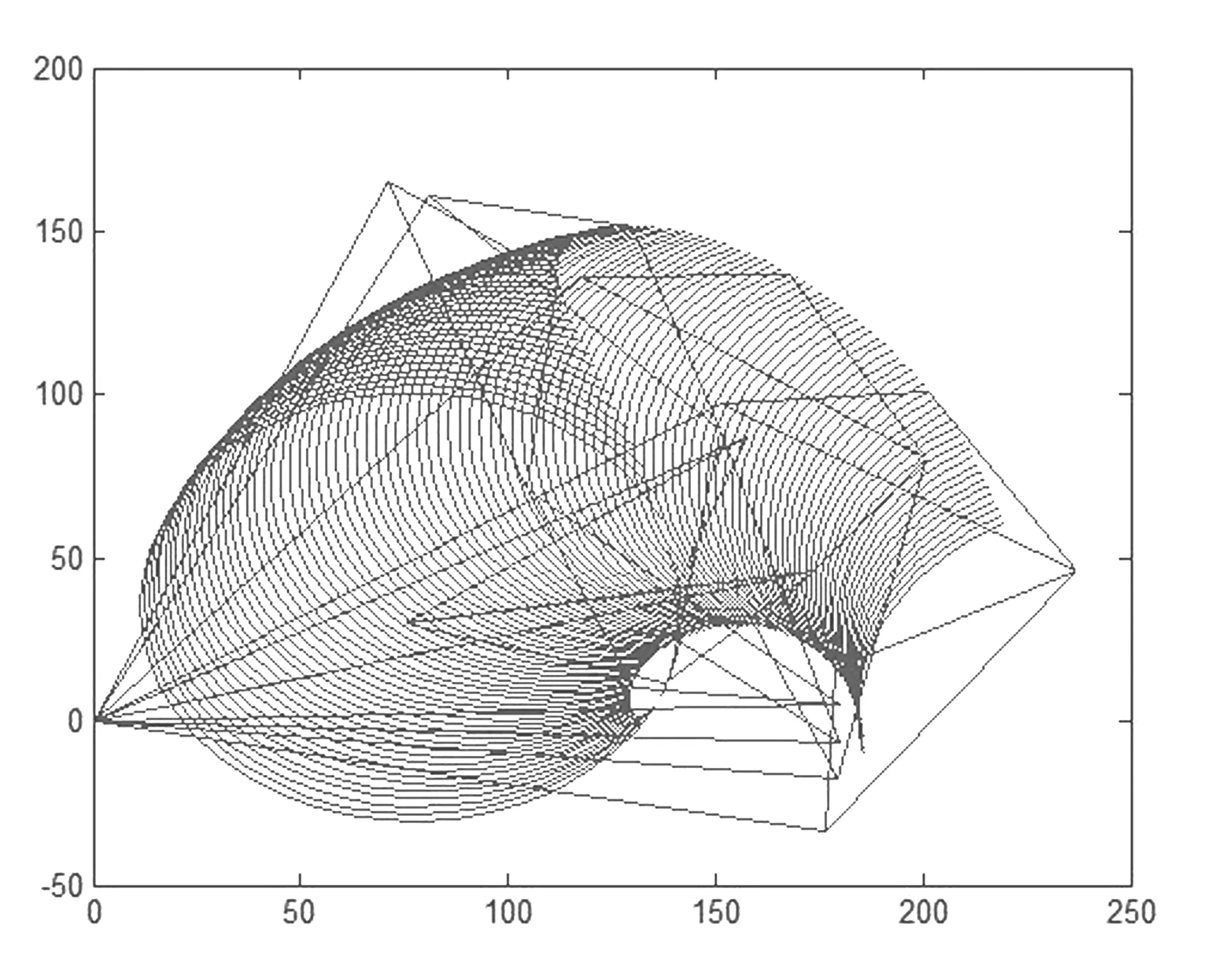
图13 新型香蕉种植机的工作空间
由图13可得出新型香蕉种植开坑机输出点的空间横向在210mm,纵向大约在-20~150mm的移动空间,满足现代香蕉种植作用要求。
5 结论
1)介绍了新型可控香蕉种植机的结构特点和工作原理。
2)根据新型香蕉种植机构的雅可比矩阵,分析了新型香蕉种植的奇异性位型。
3)根据数学定理隐含数存在的条件分析了新型香蕉种植机空间边界。
4)运用MatLab软件仿真了新型可控香蕉种植机的工作空间。
5)验证了新型香蕉种植开坑的可行性和可靠性。
[1] 程光蕴.两自由度连杆机构精确实现平面轨迹的研究 [J].东南大学学报,1990(3):7-11.
[2] 田汉民,张策,张新华. 二自由度平面五杆机构的双曲柄存在条件[J].机械设计,2001(3):23-25.
[3]BertaCW,ZengH.Analysisofaxialvibrationofcompoundbarsbydifferentialtransformationmethod[J].SoundandVibration,2004,275:641-647.
[4] 周洪,邹慧君,王石刚. 混合输入型五杆轨迹机构的分析与设计[J].上海交通大学学报,1999(7):103-107.
[5] 田汉民. 混合输入五杆机构的分析和综合[D].天津:天津大学,2001.[6] 陈纪修,於崇华,金路. 数学分析(下册) (2版)[M].北京: 高等教育出版社,2004.
[7] Tokuz,L.C. Hybrid machine modeling and control[D].Liverpool: Liverpool Polytechine,1992.
[8] 李辉. 混合驱动可控压力机的基础理论研究[D].天津: 天津大学机械工程学院,2003.
[9] 周双林,姚燕安,郭为忠.混合输入五杆机构的奇异性分析[J].上海交通大学学报,2001,35(12) :1817-1820,1833.
Abstract: Based on the banana cultivation practices, banana planting machine development the present situation of the lack of open pit, thie paper developed a connecting rod type controlled three degrees of freedom banana planting machine open pit. First, this paper introduces the new banana planting mechanism principle and structure characteristics of open pit machine, Secondly, according to a new type of banana planting machine open pit singularity of the jacobian matrix and the singular type structure, analysis is made. Again, according to the mathematical theory of several existing conditions, calculation of new banana planting machine structure workspace boundary condition, it is concluded that the banana open pit machine workspace. Simulation by using the software of matlab simulation, it is concluded that the banana open pit machine output points of space pattern. The analysis proves the feasibility of banana planting open pit machine and by sex, has certain promotion value.
ID:1003-188X(2017)06-0038-EA
The Structure Design and Spatial Analysis of the New Banana Planting Open Pit Machine
Lou Yuyin1, Huang Wei2, Liu Guanghao3,Wang Shasha2, Bi Wei2
(1.Lushan College of Guangxi University of Science and Technology ,Liuzhou 545005,China; 2.College of Mechanical Engineering, Guangxi University ,nanning 530004,China;3.Liuzhou vocational & Technical College, Liuzhou 545005,China)
planting machine open; pit singularity; space simulation; analysis
2016-05-09
广西自然科学基金项目(ky2015zl149);“十二五”国家科技支撑计划项目(2012BAF02B02);国家级大学生创新创业训练项目(t3010098236)
娄玉印 (1983-),男,山东东阿人,助教,硕士,(E-mail)louguanghua@163.com。
S222.5+
A
1003-188X(2017)06-0038-05
