果树对靶喷雾机柔性喷臂控制设计及试验
2017-12-16宋淑然郑君彬洪添胜陈建泽薛秀云代秋芳
宋淑然,郑君彬,洪添胜,陈建泽,薛秀云,代秋芳
(华南农业大学 电子工程学院,广州 510642)
果树对靶喷雾机柔性喷臂控制设计及试验
宋淑然,郑君彬,洪添胜,陈建泽,薛秀云,代秋芳
(华南农业大学 电子工程学院,广州 510642)
由于生态环境问题日益严峻,农药喷雾必然是朝着低污染、高精度、智能化与安全化的趋势发展。现有的对靶喷雾机虽然可以针对有无靶标植株进行喷药,但其喷雾架通常是固定不变的,难以同时适用于不同靶标植株。为此,提出喷臂变形以使中心喷头对准靶标植株树冠中心的柔性喷雾架方案,通过安装在拖拉机侧面的激光测距传感器对靶标植株进行距离探测,采用安装在喷臂上的角度传感器对柔性喷雾架的形状进行实时检测。根据上述检测结果,通过程序内部运算, 获得控制量,驱动电推杆对喷雾架进行形状调整,同时由安装在十字架上的超声波传感器对喷雾架下的靶标植株进行实时的识别探测,并设计了一种能同时满足不同靶标植株形状的对靶喷雾控制机构。为了减小调节时间和由于机构抖动造成的系统误动作,在喷臂调节算法的基础上增加了调整死区。通过试验分析,喷雾架可以根据拖拉机侧面与靶标植株树干的距离进行柔性对靶调节,喷雾架最大的调节时间为5.8s,满足对靶喷雾的实时性要求。
对靶喷雾;柔性喷臂;激光测距传感器;超声波传感器;调整死区;喷雾机
0 引言
果园病虫害防治是果园管理中最重要,也是最费时的一项作业,据统计,果树在一年生长期内至少需要施药8~15次,约占果园总作业量的30%[1]。我国果园传统的施药方式是连续喷药,此种方法具有明显缺点:由于果树并非连续种植,而是存在较宽的株距,当喷雾机运行至两棵果树之间时,其所喷出的药液不能有效地沉积在果树上,从而造成无效喷药。通过靶标探测技术,喷雾系统能识别是否存在靶标植株,从而决定是否喷药,将连续喷药转化为间歇喷药[2-5]。

在以上的研究中,研究的重点侧重于通过探测传感器指导喷雾机上喷头的开合位置与开合时间,用于施药的喷雾架结构一般是固定不变的。而实际果园中,果树的形状及喷雾机与果树的相对位置是不同的,为了更好地进行精准喷雾,设计了一种喷雾架形状可调的柔性对靶喷雾装置。该喷雾架能够根据果树树冠的中心位置进行自适应变形,使柔性喷雾架上的喷雾中心与靶标植株树冠中心对齐,从而实现更好的对靶喷雾效果。
1 对靶喷雾机柔性喷臂的构成及工作原理
1.1 果树柔性对靶喷雾系统简介
果树柔性对靶喷雾系统以拖拉机为移动平台,如图1所示。柔性对靶喷雾系统包括喷臂单元、靶标探测单元、喷雾单元和控制单元。喷臂单元由水平喷臂、斜撑喷臂和伸缩臂组成;靶标探测单元由激光测距传感器、倾角传感器和超声波传感器组成;喷雾单元由通过软管垂直悬挂在水平臂的5个喷头组成,喷头的雾锥角α为80°;控制单元由两个mega16系统板组成。试验果树的平均高度为1 700mm,平均冠幅为1 500mm。

1.水平臂 2. 1号倾角传感器 3.2号倾角传感器 4.斜撑喷臂 5.喷雾软管 6.喷头 7.伸缩臂 8.激光测距传感器 9.果树 10.拖拉机
图1中,每根喷雾软管管长460mm,5根喷雾软管间距均为230mm,水平喷雾覆盖范围为920mm。为使喷雾覆盖范围达到果树冠幅1 500mm,需要最左与最右的两个喷头的喷雾范围各向外延伸290mm,选用喷头的雾锥角α为80°,所以喷头到树冠间的最小竖直距离h为
(1)
即喷头到树冠之间的竖直距离大于345mm时,喷雾范围能覆盖整个树冠。
1.2 对靶喷雾机柔性喷臂结构设计
果园对靶喷雾机柔性喷臂的结构根据挖掘机的挖掘臂结构仿形设计,如图2所示。整个机构由水平喷臂、斜撑喷臂、伸缩臂、电动推杆A和电动推杆B等5个部分组成。水平喷臂在电动推杆A的作用下需要始终与水平面保持平行,以保证喷雾雾滴附着在靶标树冠上;斜撑喷臂在电动推杆B的作用下俯仰摆动;伸缩臂除了对整个喷臂架构起到固定与支撑作用外,还可以改变喷臂架构的高度,使柔性对靶喷臂架构适用于生长期、植株高度不同的果树。喷雾前,根据果树的实际高度人工调节伸缩臂的高度。考虑到果树的行距,同时为保证喷臂调整的稳定性及喷雾区域覆盖树冠,斜撑喷臂的长度应适宜,本文斜撑臂长度为800mm,水平臂长度为1 600mm。图2(a)和(b)分别代表了喷雾单元中心喷头随着机构变形移动到左右两个极限位置时柔性喷臂的形态。

(a) (b)
根据电动推杆B的行程与安装位置可得:斜撑喷臂与水平方向的夹角θn的变化范围为20°~55°。为保证柔性喷雾架调整至图2中的两个极限位置时均能使雾滴在树冠上的覆盖,只需满足当θn为20°时,喷头与树冠的竖直距离不小于345mm即可。根据图1与图2,计算出伸缩臂的最小长度L为
L=(460-800sinθn)+h+1700-200
(2)
其中,460为喷雾软管长度(mm);θn=20°;h=345mm;1 700为试验果树的平均高度(mm);200为伸缩臂距离地面的高度(mm)。根据式(2)可以求出伸缩臂的最小长度为2 032mm。
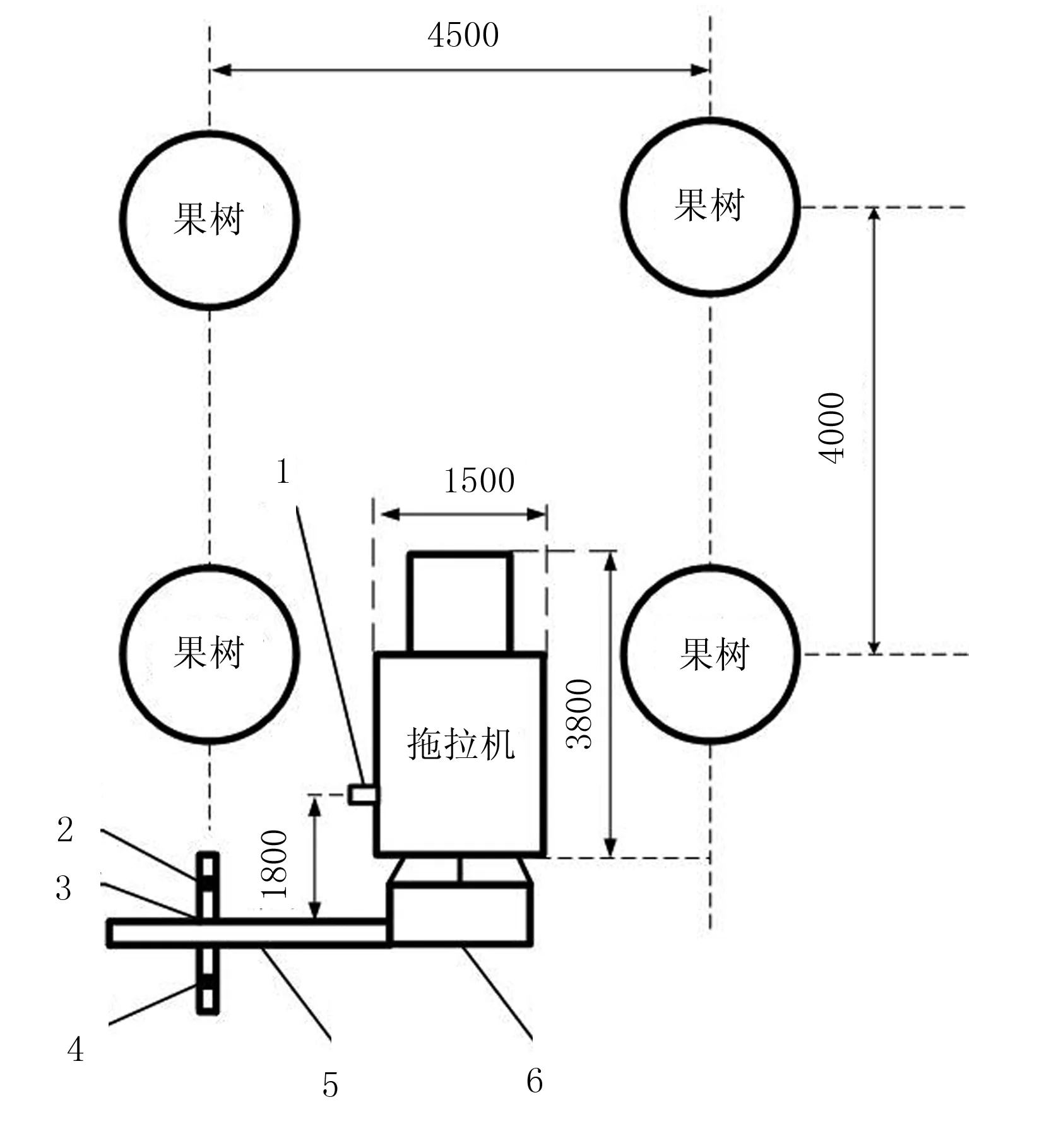
如图3所示,实验果园果树的行距为4.5m,株距为4m,搭载果园柔性对靶喷雾系统的拖拉机长3.8m、宽1.5m。
在喷雾作业的过程中,拖拉机很难一直保持直线行驶,拖拉机侧面距离靶标树干的距离D是可变的。柔性喷雾架调节目的就是在拖拉机的行进过程中,保证喷雾单元的中心喷头始终与靶标植株中心重合,实现最优化的喷雾效果。
1.3 对靶喷雾柔性喷臂的调节原理
通过激光测距传感器进行靶标植株探测,一旦检测到有效靶标,主控单元根据式(3)求出斜撑喷臂的目标调整角度θt,有
(3)
其中,D为激光测距传感器检测到的靶标树干距离(参见图1);900为水平臂最左端到喷雾单元中心喷头的水平距离(mm);800为伸缩臂的长度(mm)。
主控单元将目标调整角度θt与当前斜撑臂与水平方向的夹角θn作比较,从而决定电动推杆B的伸缩。在喷雾臂的调节过程中,斜撑喷臂的调节是主动调节,水平喷臂的调节是从动调节。在斜撑喷臂进行调节的同时,水平喷臂受其影响会偏离水平位置,主控单元根据其偏离的方向决定电动推杆A的伸缩。
1.中心喷头的位置 2.水平喷臂 3.斜撑喷臂 4.伸缩臂 5.电动推杆B 6.电动推杆A
2 靶标检测及喷臂控制
2.1 靶标检测
靶标探测分为对靶标树干距离的探测、对喷臂角度的探测及对靶标冠层的检测。
本系统选用武汉欧卡科技有限公司的INSIGHT-60型激光测距传感器,检测拖拉机侧面到靶标树干的距离D,探测距离范围为0.001~60m,探测频率为5Hz,最高探测精度为0.5mm。传感器工作时,探测结果通过串口传输给主控单元,主控单元根据式(3)求出斜撑臂的目标调整角度θt,然后根据控制程序,驱动电动推杆调整斜撑臂。
在田间探索性试验过程中发现,影响靶标检测准确度的主要因素是光照强度和果园中的非靶标树干背景。通过在激光探测头上添加滤镜,减弱了光照强度对激光测距传感器数据返回的干扰;对杂草、树枝下垂及树叶遮挡等非靶标植株的干扰,可通过程序滤波进行排除。由图3可知:激光传感器距离靶标树干的距离,最大值为3m,若探测结果大于3m,则视为无效数据;只有当探测结果连续3次有效,主控单元才会对返回的数据进行处理,以此排除非靶标产生的干扰。
喷臂的角度检测需要用到两个倾角传感器,分别用于检测水平喷臂和斜撑喷臂与水平方向的夹角。选用硕锋电子科技公司的SSA型倾角传感器,倾角传感器工作时,测试结果通过模拟电压的形式传输给主控单元。水平喷臂在水平方向上上下摆动,因而选择对称型的SSA60,其量程为-60°~+60°;而斜撑喷臂始终在垂直方向的右侧摆动,所以选择非对称型倾角传感器SSA61,其量程为-30°~+90°。
与树干不同,树冠由许多疏密不同的树枝与树叶构成,如果仍然采用类似的点对点形式的测距方式,就可能会因为树叶之间的缝隙而探测出错误的结果,所以必须使用漫射型测距方式,超声波测距就满足上述的要求。本系统选用深圳导向技术公司生产的KS-103系列超声波传感器,探测结果通过I2C总线传输给主控系统。该传感器探测距离范围为10~5 500mm,探测频率为500Hz,最高探测精度为1mm。试验发现,若将超声波测距传感器直接安装在水平喷臂底侧,喷雾单元软管的摆动往往对超声波测距传感器的探测产生遮挡。为了避免这种情况,特别在水平臂喷臂中心位置设置了十字架(如图3所示),两个超声波测距传感器分别固定安装在十字架的两翼。同时,通过这种结构,主控单元可实现延后开放,提前关闭的控制方式(当2号超声波传感器超声波检测到靶标时,打开电池阀进行喷雾;当1号超声波传感器检测不到靶标时,关闭电磁阀停止喷雾),与其他方式相比,这种方式能更有效实现对靶喷雾和提高雾滴沉积率[10]。
2.2 喷臂控制
喷臂的控制由主控单元和动作执行单元完成。
1)主控单元。主控单元的作用是在接收到倾角传感器、激光测距传感器、超声波测距传感器采集后的数据后,对这些数据进行分析处理。当这些数据分别达到各自阈值时,主控单元控制电动推杆与电磁阀进行对应的动作,以达到调整喷雾架形状和控制喷雾的目的。果园柔性对靶喷雾控制装置需要用到的单片机资源有:一个串口总线接口、一个I2C协议接口、两个16位定时计数器、两个8位定时计数器和两个10位精度的A/D转换器。本系统选择使用两片AVR-Mega16单片机实现上述功能。
2)动作执行单元。主控单元通过控制两个电动推杆的伸缩运动来实现柔性喷雾架的形状调节。电动推杆的运动速度及方向都由主控单元控制;电动推杆内部自带行程开关,可以在往复运动两个方向的极限位置自动断电停机,以防自身损坏;另外,电动推杆在停止运动后具有自锁能力,能够在断电的情况下承受负载并保持原状。柔性喷雾架形状的调节需要两根电动推杆来完成,为了完成指定的机构调节,选用了两个行程不同的电动推杆,LAM1-S0-150型推杆(伸缩范围为320~470mm)和LAM1-S0-200型推杆(伸缩范围为370~570mm)分别作为电动推杆A和电动推杆B,其额定推力为3000N。
3 控制程序设计
柔性对靶喷臂控制程序包含斜撑喷臂角度调整控制程序和水平喷臂角度调整控制程序。
3.1 斜撑喷臂角度调整控制程序
在斜撑喷臂的角度调整过程中,其控制流程如图4所示。

图4 斜撑喷臂动作控制流程图
首先,由激光测距传感器探测靶标植株树干到拖拉机的距离,并将此距离通过式(3)转化成斜撑喷臂的目标角度θt;主控单元通过倾角传感器获取到当前角度θn后,开始对两者进行比较。当θt-θn≥3°(死区角正向最大)时,主控单元控制电动推杆B伸长;当θt-θn≤-3°(死区角反向最大)时,主控单元控制电动推杆B收缩;当3°≥θt-θn≥-3°时,主控单元默认已达到控制目的,逐渐降低驱动信号的占空比。
斜撑喷臂的调节是整个柔性喷雾架调节的基础,其调节过程中的平稳度及调节时间都对水平喷臂的调节和喷雾效果产生很大的影响,因此对斜撑喷臂的控制应该重点满足稳定性和快速性的要求。经过试验发现:如果采用普通“通电动、断电停”的方法控制电动推杆,在推杆启动和停止的瞬间,会引起整个柔性喷雾架的剧烈抖动,不仅对喷雾的准确性造成不利影响,也对柔性喷雾架本身的机械机构造成冲击。因此,使用“软启动与软停止”的方式控制电动推杆。启动时,电推杆驱动信号的占空比由10%开始,以3%递增,递增频率为50Hz,直至占空比达到100%时停止加速,电推杆维持此速度运动。当检测到3°≥θt-θn≥-3°时,即斜撑喷臂进入死区范围。此时电推杆驱动信号的占空比开始以5%递减,频率也是50Hz,直至占空比减小至10%时,将单驱动信号的输出口关闭,电动推杆B停止运动,通过这种调节方式,不但有效减小了柔性喷雾架运动状态改变时的机构抖动,还提高了柔性喷雾架的调节速度。
3.2 水平喷臂角度调整控制程序
在柔性喷雾架的调节过程中,斜撑喷臂的动作必然会引起水平喷臂角度的变化,从而影响喷雾中心与靶标植株中心的相对位置,进而影响喷雾有效性。本程序的控制目标是调整水平喷臂的位置,使其能在一定范围内保持水平。
为了避免由于机构的机械抖动导致水平喷臂调节时间过长的问题,在控制水平喷臂的位置时没有要求其绝对水平,而是将水平位置附近的一个死区范围(-2°~2°)作为控制目标,即平衡臂一旦进入该死区范围,即被系统认定水平喷臂已处于水平位置。系统采集到水平喷臂的角度θk后,立即将它与死区角进行比较:若θk≥2°,则控制电动推杆A收缩,使θk减小;若θk≤-2°,则控制电动推杆A伸长,使θk增大;若2°≥θk≥-2°,则表明水平喷臂的角度进入死区范围,则电动推杆A不动作。其控制流程如图5所示。
为了避免由于机构的机械抖动导致水平喷臂调节时间过长的问题,在控制水平喷臂的位置时没有要求其绝对水平,而是将水平位置附近的一个死区范围(-2°~2°)作为控制目标,即平衡臂一旦进入该死区范围,系统即认定水平喷臂已处于水平位置。系统采集到水平喷臂的角度θk后,立即将它与死区角进行比较,若θk≥2°,则控制电动推杆A收缩,使θk减小;若θk≤-2°,则控制电动推杆A伸长,使θk增大;若2°≥θk≥-2°,则表明水平喷臂的角度进入死区范围,则电动推杆A不动作。
由于果园地面原因,柔性对靶喷雾控制机构运行时存在抖动,因此对稳态误差的要求较低,而对响应速度要求较高。为使水平喷臂在调节过程中能快速进入平衡状态,舍弃了影响调节速度的积分环节,采用比例微分的控制方式[11],其控制规律为
u(t)=
(4)
其中,Kp是比例系数;Td是微分时间常数;T是采样周期;Error(t)和Error(t-1)分别为第t次和第t-1次得到的偏差。水平喷臂的控制参数的整定采用实验试凑法,其中比例增益Kp取值20.6,微分时间常数Td取值为0.06。

图5 水平喷臂动作控制流程图
4 柔性喷雾架调整试验
柔性喷雾架的调节时间由水平喷臂调节时间和斜撑喷臂调节时间构成。其中,水平喷臂的调节由电动推杆A完成,采用PD调节的控制方式;斜撑喷臂的调节由电动推杆B完成,采用“软启动与软停止”。 由于水平喷臂的调节时间与其起始动作的位置有关,因此在不同情况下柔性喷雾架的调节时间也不同。
4.1 斜撑喷臂角度对水平喷臂调节时间的影响
为了评估水平喷臂在调节速度上的性能,通过人工计时的方式测量了在斜撑喷臂与水平方向的夹角分别为35°、40°、45°的情况下,水平喷臂分别由8°、12°、16°、20°摆动至停止所占用的时间。水平喷臂调节时间为秒级,可以用秒表计时。试验前首先调整斜撑喷臂至目标角度,调节完成后切断电动推杆B的电源以保证斜撑喷臂角度不再变化;调整水平喷臂至试验的初始角度,待其静止后开启果园柔性对靶喷雾控制装置的自动模式(在自动模式下,水平喷臂做自水平调节),从水平喷臂摆动开始计时,到其停止摆动终止,持续的时间即为水平喷臂调节时间。试验结果如表1所示。

表1 斜撑喷臂初始角度不同的情况下水平喷臂的调节时间
从表1中可以看出:在斜撑喷臂与水平方向夹角不同的情况下,水平喷臂由相同起始角度调整至水平位置所需要的时间是不同的。在斜撑喷臂与水平方向夹角为35°的情况下,水平喷臂对应的调节时间最短;在斜撑喷臂与水平方向夹角为45°的情况下,水平喷臂的调节时间最长。因为当斜撑喷臂与水平方向的夹角θt不同,水平喷臂调节相同角度的情况下电动推杆A的伸缩距离也不同。例如,当θn为35°时,水平喷臂从起始角度12°开始运动,此时电动推杆A的长度是421.4mm;在水平喷臂进入死区范围并停止运动时,电动推杆A的长度是410.2mm;即整个过程中电动推杆A的收缩距离是11.2mm。而当θn为45°的情况下,重复上述过程,电动推杆A的收缩距离为15.0mm。因此,电动推杆A收缩距离的不同导致了水平喷臂调节时间的不同。
4.2 柔性喷雾架整体调节时间
开启果园柔性对靶喷雾控制装置的自动模式后,激光测距传感器开始探测靶标植株,如果没有靶标植株树干出现在激光测距传感器探测的有效距离范围内,斜撑喷臂会自动调整至41.4°,同时水平喷臂也会随之调整至水平状态,该状态被称为初始化平衡状态。
以秒表为工具,在激光测距传感器探测到靶标植株的树干时开始计时,记录柔性喷雾架从开始调节到调节完毕所需要的时间。试验中,将激光测距传感器固定在桌面上,在距离其探头1.35~1.65m的范围内每间隔0.05m选取一个点,用铁板代替靶标植株的树干作为激光测距传感器的探测靶标;当喷雾架静止在初始化平衡状态后,快速将铁板放置在待测目标点上,使其遮挡激光测距传感器射出的激光束;从铁板开始遮挡激光测距传感器的时刻开始计时,到斜撑喷臂停止摆动时所持续的时间即为斜撑喷臂调节时间,而到水平喷臂停止摆动时所持续的时间即为柔性喷雾架整体调节时间。每个目标距离下斜撑喷臂的调节时间和整体调节时间均进行3次测量求平均值,结果如图6所示。

图6 斜撑喷臂调节时间与柔性喷雾架整体调节时间试验结果
由图6可知:随着激光探测距离的变化,斜撑喷臂的目标角度也会随之变化,当该目标角度与斜撑喷臂初始平衡状态的角度之差在死区范围内时,斜撑喷臂没有动作,整个柔性喷雾架保持原状;当斜撑臂的目标调整角度与当前角度之差在斜撑喷臂死区范围外时,斜撑喷臂开始向目标角度运动,在运动过程中直接影响水平喷臂的角度,当该角度超出水平喷臂死区范围时,便开始进行自水平调节,以此完成柔性喷雾架形状的调节。从试验结果可以看出:柔性喷雾架从初始平衡状态调整到目标位置最多需要5.8s。根据实际测量,拖拉机在低挡位(0.864km/h)的行驶速度下,从激光测距传感器检测到靶标植株再到柔性喷雾架经过靶标植株,需要大约7.5s的时间。因此,在拖拉机进行喷雾作业时,果园柔性对靶喷雾系统可以保证在柔性喷雾架到达每颗果树之前,将柔性喷雾架的形状调整至最佳。
5 结论与讨论
1)果园柔性对靶喷雾系统的柔性喷雾架为形状可调机构,可以根据拖拉机侧面与靶标植株树干的距离进行柔性对靶调节,保证机构的喷雾中心始终与靶标植株树冠的中心对齐。
2)果园柔性对靶喷雾系统喷雾单元的支管由硬质管和柔性软管共同构成,当系统在喷雾过程中遇到果树遮挡喷头的行进路线时,软管部分可以通过弯曲使喷头能进入果树内膛且不造成果树机械性损伤。
探测性田间试验中发现:由于激光探测传感器的安装位置与喷雾架之间的距离较近及激光测距传感器探测频率较低,使得果园柔性对靶喷雾系统只有在拖拉机行驶速度较低时才能完成喷雾架调节。为提高工效,可以延长激光测距传感器与柔性喷雾喷雾架的距离,保证有充足的时间进行喷雾架调节;或者选用探测频率较高的激光测距传感器,通过硬件升级提高靶标探测速度。
[1] 张海锋, 许林云.果园喷雾机发展现状及展望[J].中国农机化学报, 2014,35(3):112-118.
[2] 樊荣, 师帅兵, 杨福增, 等.我国植保机械常用喷头的研究现状及发展趋势[J].农机化研究, 2014,36(6):6-9.
[3] 张富贵, 洪添胜, 王锦坚, 等.现代农药喷施技术及装备研究进展[J].农机化研究, 2011,33(2):209-213.
[4] 刘金锁, 王进华, 贾晶霞.国外自走式喷雾机发展概况[J].农业工程, 2015,5(4):29-31.
[5] 杨金平, 谢斌.车载式喷雾机的技术特点及发展现状[J].江苏农机化, 2015(3):53-54.
[7] 邱白晶, 李佐鹏, 吴昊, 等.变量喷雾装置响应性能的试验研究[J].农业工程学报, 2007,23(11):148-152.
[8] Rosell Joan R., Llorens Jordi, Sanz Ricardo, et al.Obtaining the three-dimensional structure of tree orchards from remote 2D terrestrial LIDAR scanning[J].Agricultural and Forest Meteorology, 2009,149(9):1505-1515.
[9] 甘英俊, 周宏平, 郑加强.车载对靶喷雾机自动控制及低速巡航系统的研究[J].南京林业大学学报:自然科学版, 2011,35(1):99-102.
[10] 宋淑然, 陈建泽, 洪添胜, 等.果园柔性对靶喷雾装置设计与试验[J].农业工程学报, 2015,31(10):57-63.
[11] 李国林.PID控制器参数整定技术研究与优化设计[D].大连:大连理工大学, 2010.
Design and Experiment of the Control of Flexible Spray Arm on Orchard Targeted Spray Device
Song Shuran, Zheng Junbin, Hong Tiansheng, Chen Jianze, Xue Xiuyun, Dai Qiufang
(College of Electronic Engineering, South China Agricultural University, Guangzhou 510642, China)
Because of the increasingly serious ecological environment, agricultural spray is definitely on the trend toward low pollution, high precision, intellectualization and safety. Prevention and control of orchard plant diseases and insect pests is the most essential and time-consuming job. According to statistic, the spray of the fruit tree would need at least 8-15 times in a year of growing period and this job will occupy 30% of the orchard workload. The traditional method of spray used in our country is continuous spray and this method has one obvious shortcomings: the fruit trees in the orchard is not planted continuously and there is row spacing between two trees. When the spray device moves to the row spacing between two trees, the spray can not be deposited on the tree efficiently and this will cause invalid spray. Via the detection technique, can the spray device distinguish the existence of the targeted plants.These technique will change the continuous spray into the discontinuous spray. Although the available targeted spray device can do the spray job based on the existence of the targeted plants, the spray frame is always fixed and it is hard to apply to different targeted plants. In order to solve this problem, this article has put forward a scheme that adjusting the position of the central nozzle to align the center of the crown of the targeted plant by deformation of the spray frame. The distance between the targeted plant and the right side of the tractor is measured by the laser sensor installed on the tractor. The shape of the flexible spray frame is detected by the inclinometer installed on the spray arm. Base on the detection result above, the controlled variable is acquired through the operation of the internal program and the electromotive handspikes are motivated to adjust the spray frame. In order to reduce the adjusting time and the mechanical vibration, the PD regulation algorithm is used in the control of the diagonal arm and the soft star and stop regulation algorithm is used in the control of the horizontal arm. In the same time, the ultrasonic sensor installed on the cross is used to detect the targeted plant below the spray frame. A targeted spray device is designed to apply to different targeted plants. This device is consisted of the spray arm unit, the detection unit, the spray unit and the control unit. The spray arm unit is consisted of the diagonal arm, the horizontal unit and the telescopic boom. The detection unit is consisted of the laser distance measuring sensor, the inclinometer and the ultrasonic sensor. The spray unit is consisted of five nozzles hanged in the horizontal arm. The control unit is consisted of two mega-16 system board. The regulated dead zone is added on the basis of the adjusting algorithm of the spray arm. Through the analysis of the experiment, the spray frame can do the flexible targeted deformation according to the distance between the right side of the tractor and the targeted plants.The maximum adjusting time of the spray frame is 5.8s and it fulfills the real-time demand of the targeted spray.
targeted spray; flexible spray arm; the laser distance measuring sensor; the ultrasonic sensor; the dead zone;spray device
2016-04-06
公益性行业(农业)科研专项(201203016)
宋淑然(1965-),女,河北安国人,教授,博士,硕士生导师,(E-mail)songshuran@scau.edu.cn。
洪添胜(1955-),男,广东梅县人,教授,博士,博士生导师,(E-mail)tshong@scau.edu.cn。
S491
A
1003-188X(2017)05-0106-07
