拖拉机多段液压机械CVT犁耕作业动态仿真
2017-12-15王全胜张明柱白东洋尹玉鑫郝晓阳
王全胜,张明柱,白东洋,尹玉鑫,郝晓阳
(河南科技大学 机电工程学院,河南 洛阳 471003)
拖拉机多段液压机械CVT犁耕作业动态仿真
王全胜,张明柱,白东洋,尹玉鑫,郝晓阳
(河南科技大学 机电工程学院,河南 洛阳 471003)
针对装备多段液压机械式CVT(HMCVT)拖拉机在犁耕作业下的动态特性,运用动力学基本原理建立拖拉机动力学模型,包括发动机、多段液压机械式CVT变速器、中央传动和行走负载机构动力学模型。通过控制发动机油门和转速信号,仿真出拖拉机犁耕时车速、驱动力和加速度的动态响应。仿真结果表明:在调节发动机油门时车速平稳变化,而驱动力和加速度在开始调整时出现剧烈波动,而后平滑过渡直至稳定,并且牵引负载对拖拉机加速度存在明显的影响。仿真结论:装备多段HMCVT拖拉机在犁耕作业时具有良好的动态特性,为制定装备多段HMCVT拖拉机经济性最佳的动态控制策略奠定了基础。
多段液压机械式HMCVT;动态特性;动力学仿真;犁耕
0 引言
多段HMCVT是一种运用功率分流原理实现无级变速的传动装置,具有传递功率大、效率高的优点,应用广泛[1-2]。在车辆动态特性研究方面,国外从20世纪60年代 已经开始在军用车辆上应用,并且对装备多段HMCVT拖拉机的动态特性理论研究比较成熟[3]。国内的研究主要是针对HMCVT动态特性的影响因素、动力学仿真和换段品质的研究[4-6],但对装备多段HMCVT拖拉机在犁耕条件下动态特性的研究较少。因此,本文建立拖拉机整车动力学模型,研究装备多段HMCVT拖拉机在犁耕作业时的动态特性。
拖拉机功率从发动机输出,依次经过多段HMCVT、中央传动机构和行走机构,最后到牵引负载。因此,依次建立发动机、多段HMCVT、中央传动和行走负载机构动态模型,仿真分析拖拉机在犁耕时动态特性。
1 发动机动态模型
发动机结构复杂,在实际工作时,必须克服运动组件的惯性负载和阻尼负载,可根据参考文献[7]建立发动机动态模型。
发动机动态模型可表示为
(1)
发动机静态调速特性表示为
(2)
其中,Te表示为发动机静态转矩(N·m);ne表示发动机转速(r/min);Ted表示发动机动态转矩(N·m);α表示发动机油门开度;Je表示发动机等效转动惯,取1.2kg·m2;Ce表示发动机等效粘性阻尼,取0.1Nm·s。
2 HMCVT动力学模型
多段HMCVT动力传动简图如图1所示。
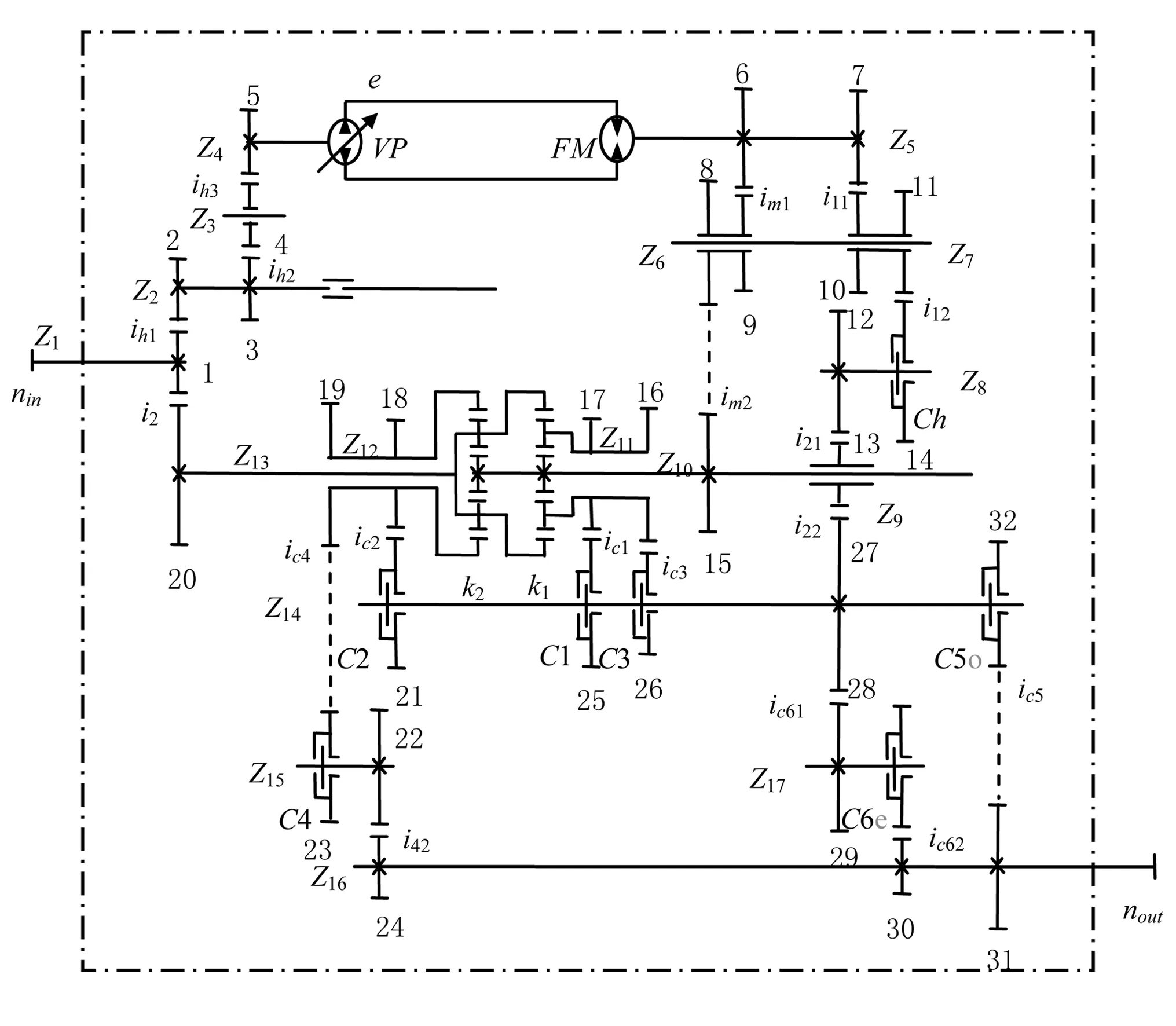
图1 HMCVT传动简图
从图1中可以看出:该变速器为双功率流封闭行星齿轮传动,功率由I输入并分为液压路和机械路功率流,由行星轮系完成汇流,最后由Ⅳ轴输出;通过控制离合器结合状态,实现不同段位的切换,进而实现速比的连续变化。
由于建立HMCVT动力学模型主要研究变速器的动态特性,并且变速器组件变形小,因此可以忽略变速器组件的弹性变形[8]。根据文献[6]可以把HMCVT动力学模型分为离合器模块、泵-马达系统和轴系模块。各个模块建模均以离合器C1和C5闭合的液压机械段为例。
2.1 离合器模型
多片湿式离合器的动力学模型由主、从动盘和摩擦片等构成,具体如参考文献[9]中所示。其中,ωmc(ωsc)、Jmc(Jsc)、Cmc(Csc)、Tmc(Tsc)分别为主、从动盘角速度,等效转动惯量,阻尼和转矩。由文献[10]可知:离合器有3种工作状态,分别为完全分离、滑摩和完全结合状态,从完全分离到完全结合经过4个阶段:
1)空行程阶段。主、动盘未接触,此时有
Tsc=0;ωsc=0
(3)
2)静阻力阶段。主、从动盘的摩擦转矩小于从动盘的负载转矩Tf,此时有
(4)
3)滑摩阶段。主、从动盘摩擦转矩带动从动盘转动,此时有
(6)
4)同步阶段。主、从动盘结合在一起,角速度和转矩均相同,此时有
(7)
其中,在静阻力和滑摩阶段,从动盘转矩与主、从动盘摩擦转矩相同[11],即
(8)
其中,n0表示摩擦片数;F表示主、从离合器压力(N);R0表示摩擦片外半径(m);Rp表示摩擦片内半径(m);k表示摩擦片系数的斜率;μs表示无滑转时的摩擦因数。
2.2 泵-马达系统动态模型
HMCVT液压路使用的是变量泵-定量马达系统,通过改变变量泵的排量比实现液压路速比的连续变化。由于泵-马达系统的动力学模型比较复杂,影响因素很多,如系统泄漏、补油、油液密度和粘度变法也很多,因此建模方法很多,侧重面也不同。本文根据文献[11]建立泵-马达系统动力学建模。动力学模型数学表达式为
(9)
(10)
(11)
其中,Tp(Tm)为泵或马达轴转矩(N·m);e为泵排量比;Jp(Jm)为泵或马达转动部分转动等效转动惯量(kg·m2);Cp(Cm)为为泵或马达的阻尼系数;V为压力油腔总容积(m3);β为油液体积弹性模量(Pa);Ph、Pl为高、低压侧的压力(Pa);Ct为泵和马达总泄漏系数;Cit为内泄漏系数;ωp(ωm)为泵或马达角速度(rad/s);qm为马达的排量(mL/r);Dm为马达的额定排量(m3/rad)。
2.3 轴系模型
HMCVT结构紧凑,组件变形小,因此忽略HMCVT弹性变形对动力学模型造成的影响[12]。HMCVT各轴之间通过齿轮副或离合器传递动力,因此把轴以及固定在轴上的组件作为一个轴建立动力学模型。以离合器C1、C5结合的液压机械段为例建立轴系模型如图2所示。图2中数字代表齿轮编号,Z开头的代表轴,C开头的代表离合器(主动侧加m前缀,从动侧加s前缀),J、C、T、ω代表轴或齿轮的转动惯量、阻尼、转矩和角速度,i开头的表示齿轮副的传动比。
根据轴系模型列动力学模型为
(12)
(13)
(14)
(15)
(16)
(17)
(18)
(19)
(20)
(CZ10+Csk2+Csk1)ωZ15=T15-Tsk1
(21)
Tck1-T25/iC1-T19/iC3
(22)
(CZ13+Cck2+Crk1)ωZ13=TZ13-Trk1
(23)
(24)
(25)
(26)
(27)
(28)
(29)
(30)
(31)
(32)

图2 液压机械无级变速器轴系模型
3 中央传动动态模型
不考虑车辆的转向问题,简化中央传动机构,建立中央传动系统动力学模型为
(33)
其中,JZY、CZY为中央传动的等效转动惯量和阻尼;Tw为驱动轮转矩(kN)。
4 行走负载机构动态模型
为简化模型,把拖拉机看作刚性结构,在受到牵引力FT、驱动力Fq、滚动阻力Ff、风阻Fw和坡道阻力Fα的条件下处于动态平衡中,拖拉机在作业时,由于车速较低,风阻忽略不计,受力分析如图3所示。
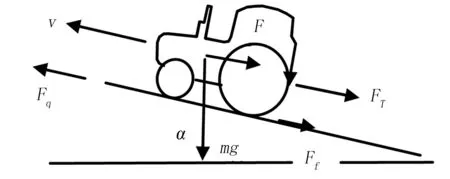
图3 行走负载机构受力分析
其平衡方程为
(34)
Fq=Twrd
(35)
Ff=μmgcosα
(36)
Fα=mgsinα
(37)
(38)
(39)
犁耕时动力学模型表示为
FT=nkbh
(40)
其中,FT为拖拉机牵引力(kN);Ff为滚动阻力(kN);Fα为坡道阻力(kN);n为犁铧数;μ为耕地阻力因数;k为土壤阻力系数;b为犁铧宽度(cm);h为耕深(cm);α为坡度角;m为拖拉机质量(kg);v为车辆行驶车速(km/h);rd为驱动轮半径(m);ic为中央传动比;δ为驱动轮滑转率。
5 仿真结果及分析
在MatLab/Sumlink环境中依次建立发动机、HMCVT、中央传动机构和行走负载机构动力学模型, 并串联4部分构成构成整车动态模型,仿真参数如下:驱动轮半径0.704 6m、拖拉机质量(包含耕犁)7 760kg、坡度角0°、耕地阻力因数0.15、犁铧数5、土壤阻力系数5.0N/cm2、犁铧宽度20cm、耕深20cm。图4和图5分别为输入的发动机油门控制信号和耕深变化信号。仿真结果如图6~图8所示。

图4 发动机油门开度

图5 耕深变化

图6 拖拉机驱动力
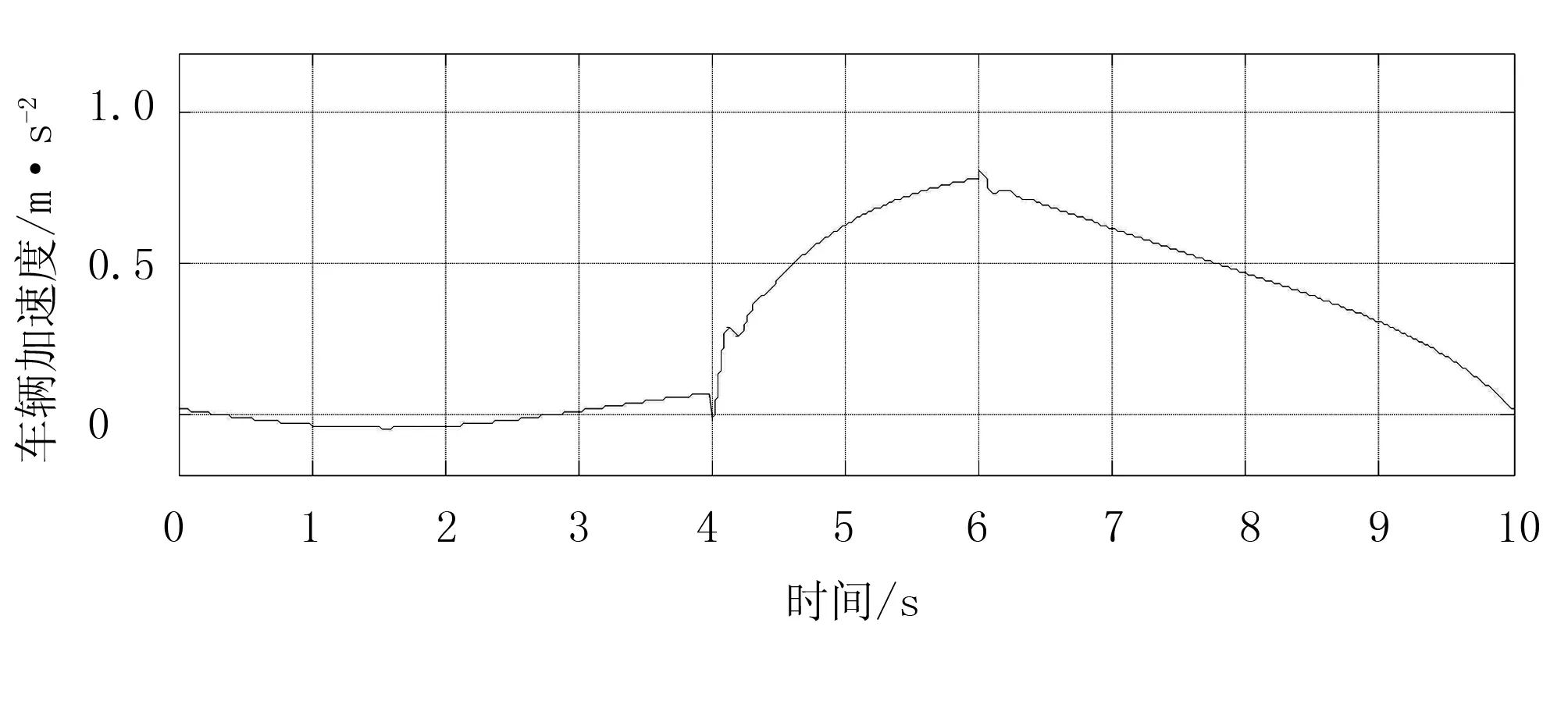
图7 拖拉机加速度

图8 拖拉机车速
结果分析:
1)图4信号主要通过油门开度的变化仿真拖拉机的加速性能,图5信号主要根据耕深的变化模拟负载的变化。从图6可以看出:拖拉机驱动力在油门开始变化时出现剧烈的波动,说明拖拉机传动系统存在动力冲击,动力冲击主要来自泵-马达系统和离合器结合。减小冲击的策略:①对于泵-马达系统,可以优化泵马达系统的结构参数及变内外泄露、改变油腔的体积等等;②对于离合器的冲击,可以制定离合器控制策略。
2)从图7可以看出:在前4s内车辆的加速度在驱动力不变时出现明显的波动,而在前4s主要是负载变化,说明拖拉机的加速度受牵引负载的影响,依此为依据可以提出发动机油门、传动比和耕深的三元调节的理论,通过三元调节使拖拉机经济性最佳或动力性最佳。
3)从图8可以看出:除了4s时刻车速出现微量的波动,其它时间速度曲线比较平滑,说明拖拉机驱动力的冲击对对速度的影响比较小。综合图6~图8可以看出:装备多段HMCVT的拖拉机在犁耕时整体动态性能较好。
6 结论
本文主要研究装备多段HMCVT传动拖拉机犁耕作业的动态特性,结果表明:装备多段HMCVT传动拖拉机在犁耕作业下动态特性较好,为制定装备多段HMCVT拖拉机经济性最佳的动态控制策略奠定基础。
[1] LINARES P,MENDEZ V,CATALAN H.Design. parameters or continuously variable power-split transmission sing planeraries with 3 active shafts [J].Journal of Terramechanics,2010,47:323-335.
[2] 赵军,尹旭峰,李雪原,等.带HMCVT的载货汽车起步特性及其控制策略的研究[J].汽车工程,2014(6):715-719.
[3] 徐立友.拖拉机液压机械无级变速器特性研究[D].西安:西安理工大学,2007.
[4] 苑士华,魏超,张银彩,等.液压机械无级变速器动态特性的影响因素研究[J].农业工程学报, 2013,44(6):29-34.
[5] 倪向东,朱思洪,张海军,等.液压机械无级变速器换段品质影响因素试验[J].农业机械学报,2008,24(2):33-38.
[6] 张明柱,周志立,徐立友,等.拖拉机多段液压机械无级变速器的动力学建模及仿真[J].西安理工大学学报,2006,22(3):269-273.
[7] 张明柱.拖拉机多段液压机械无级变速器控制策略研究[D].西安:西安理工大学,2007.
[8] Wang Wenbo.Dynamic Power tain System Modeling and Simulation with Application for Diagnostics,Design and Control[D].USA:Univesity of Wisconsin-Madison,2000.
[9] 许男.自动离合器接合规律及控制系统的研究[D].哈尔滨:哈尔滨工业大学,2009.
[10] 张飞铁,周云山,蔡源春,等.无级变速器湿式离合器动态摩擦系数对转矩传递影响的研究[J].中国机械工程,2013,24(12):1682-1686.
[11] 高翠.液压机械无级变速传动特性分析与仿真[D].镇江:江苏大学,2010.
[12] Han-Sang Jo,Sung-Tae Jo,et al.Analysis of the shift characteristic of an automated manual transmission in the parallel type hybrid drivetrain system of a transit bus [J].Heavy vehicle system, 2001(8):160-82.
Dynamic Simulation of Tractor Equipped with Multi-range Hydro-mechanical CVT during Ploughing
Wang Quansheng, Zhang Mingzhu,Bai Dongyang, Yin Yuxin, Hao Xiaoyang
(School of Mechatronics Engineering, Henan University of Science and Technology, Luoyang 471000, China)
Research on dynamic characteristics of tractor equipped with multi-range hydro-mechanical CVT during ploughing, The dynamic model of tractor including dynamic model of the engine, multi-range hydro-mechanical CVT transmission, central driving and walking mechanism is set up by using the basic principle of dynamics.By controlling engine throttle and speed signal, the dynamic response of vehicle speed, driving force and acceleration of the tractor is simulated during ploughing. The simulation results show that the speed of the engine is stable when the engine is adjusted, And the driving force and acceleration at the beginning of the adjustment appear sharp fluctuations, then smooth transition until stable,and The traction load has obvious effect on the acceleration of the tractor.Simulation results: tractor equipped with multi-range hydro-mechanical CVT during ploughing has good dynamic characteristics, laying the foundation for formulating control strategy of tractor 's best economy equipped with multi-range hydro-mechanical CVT.
multi-range hydro-mechanical CVT; dynamic characteristics; dynamic simulation; plough
2015-12-10
国家自然科学基金项目(51375145)
王全胜(1988-),男,河南商水人,硕士研究生,(E-mail)646719293@qq.com。
张明柱(1964-),男,河南伊川人,教授,博士,(E-mail)ming2000@126.com。
S219.032.1
A
1003-188X(2017)01-0232-05
