山地果园履带运输机的台架试验
2017-12-15郑鹏淋朱余清洪添胜吴伟峰蔡嘉杰
郑鹏淋,朱余清,洪添胜,吴伟峰,蔡嘉杰,刘 岳
(华南农业大学 a.工程学院;b.电子工程学院,广州 510642)
山地果园履带运输机的台架试验
郑鹏淋a,朱余清a,洪添胜a,吴伟峰a,蔡嘉杰a,刘 岳b
(华南农业大学 a.工程学院;b.电子工程学院,广州 510642)
山地果园履带运输机采用轮毂电机作为动力源,通过链传动方式来减速增矩,为计算该主减速比,设计了一款台架,用于获得电机的机械特性曲线模型。将试验数据通过SPSS软件处理,得到电机的机械特性曲线,并得到电机的外特性曲线模型为n=446.835-3.848T,然后根据设计指标计算履带运输机在极限工况下所需功率为0.868kW。再根据无刷直流电机的调速及输出功率特性,求得在该功率输出下,电机对应的转速为179 r/min。又已知驱动轮的设计转速为96 r/min,从而求得主减速比为1.86。本试验研究可为设计山地果园履带运输机提供指导。
轮毂电机;台架试验;主减速比;履带运输机;山地果园
0 引言
山地果园履带运输机是一种在山地果园环境下,进行短途农资搬运的小型履带式运输装备。与轮式运输机相比,其具有较强的爬坡能力,更适用于地形复杂、路况差甚至无路的山地果园,其爬坡度一般不超过20°[1-2]。对于这类小型履带搬运装备,国内外的许多科研机构都开展了相关研究,并取得了一定的研究成果[3-8]。华南农业大学研发的一款山地果园履带运输机采用了轮毂电机[9]作为动力源,通过链传动将动力传至驱动轮。由于轮毂电机的转速较高且输出扭矩较小,因此通过链传动的减速增矩后,再将动力传递至驱动轮。为了计算该主减速比的大小,必须获得该型轮毂电机的机械特性曲线。但是,为了获得轮毂电机的机械特性曲线,不仅需要专业设备,而且成本高昂[10]。基于上述原因,本文设计了一个简易台架试验装置,在降低试验成本的同时,获取了该电机的机械特性曲线,完成了主减速比的计算。
1 轮毂电机试验台架的结构及试验原理
1.1 轮毂电机试验台架的结构
试验台架的结构如图1所示。其中,电机支架平放在地面上,轮毂电机被安放在电机支架上,可以自由空转;制动碟则通过螺钉紧固在轮毂电机上,随着轮毂电机一起转动。通过调速转把(未画出)来控制轮毂电机的转速,通过制动手把(未画出)来控制制动钳夹紧制动碟的夹紧力度,以对电机施加摩擦阻力矩。制动钳焊接在铰接横臂的一端,铰接横臂的另一端则与横臂支架通过销钉连接,横臂支架则垂直固定在地面上。试验时,通过一根绳索将铰接横臂的活动端吊起,让制动碟可以嵌入制动钳中,并保持铰接横臂水平;在绳索的顶端则连接一个拉力传感器,用来测量绳索受到的拉力。
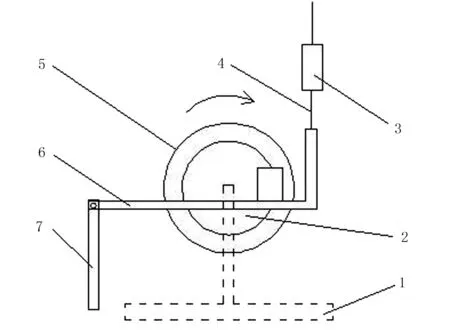
1.电机支架 2.制动碟 3.拉力计 4.绳索 5.轮毂电机 6.铰接横臂 7.横臂支架
1.2 台架的试验原理
试验时,先把调速转把转至某一角度处,并保持不变;通过制动手把控制制动钳对制动碟的夹紧力度,从而对轮毂电机施加一系列稳定的摩擦阻力矩。根据力矩平衡原理,此时电机的输出扭矩就等于制动碟受到的摩擦阻力矩。与此同时,在每一个稳定的摩擦阻力矩下,电机均对应有一个稳定输出转速,测出这个转速,可以得到一系列电机的输出扭矩与转速数据。通过拉力计,可以得到铰接横臂活动端受到的向上的拉力;再通过静力平衡公式,得到铰接横臂上制动钳处受到的向下的力,此力乘以制动碟半径就是制动碟受到的摩擦阻力矩。电机的转速可以通过手持式光电转速计读取,再将得到的转速与扭矩数据输入SPSS数据处理软件,得到轮毂电机的相应机械特性曲线模型。
2 轮毂电机台架试验
2.1 试验仪器
推拉力计传感器,数显式推拉力计,光电式转速计。
2.2 试验方法
启动电机,先将转把逐渐转至最大角度即100%位置;通过制动手把对电机施加摩擦阻力矩,拉力计随之有读数,让该读数固定于某值F(N),同时确保转把转至最大角度;当电机稳定于某一转速附近时,用转数计读出此时电机的转数n(r/min);重复进行5次,记录下对应的转速。载荷按等差数列递增,进行7组试验,得出对应的拉力F和转数n。将每组F换算成对应的阻力矩T,将该7组数据输入SPSS软件,得到轮毂电机外特性曲线模型;然后再分别将转把转至80%、60%位置,按同样方法,得到相应位置电机的机械特性曲线。
2.3 试验结果与处理分析
拉力计读数在0~60 N加载区间内递增加载,公差为10 N,得出对应的读数并记录,如表1、表2和表3所示。
表1 调速转把角度为100%情况下轮毂电机的转速

Table 1 Speed of the hub motor with the speed adjustment of 100% r/min

表2 调速转把角度为80%情况下轮毂电机的转速
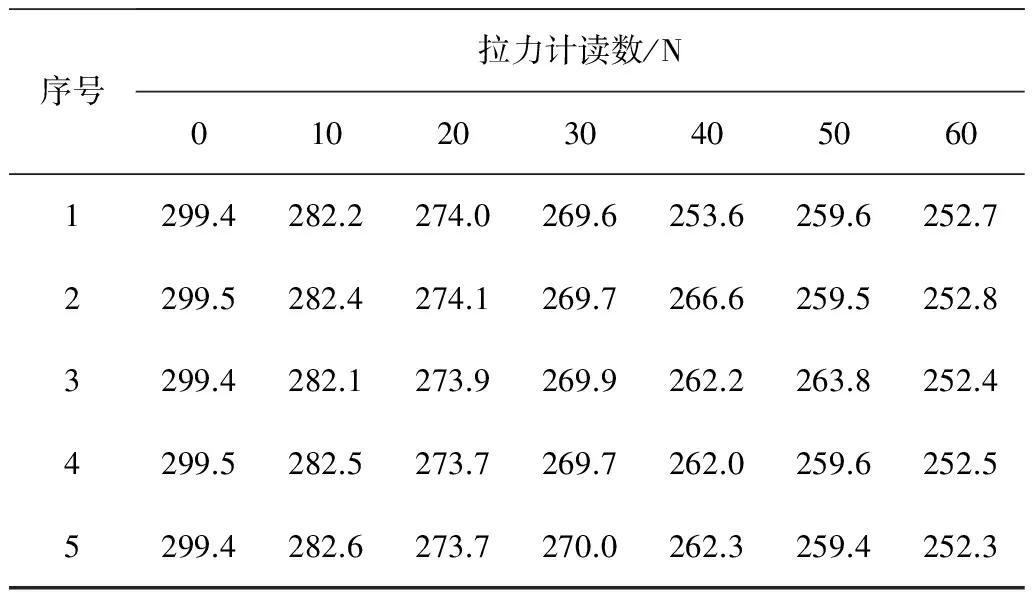
表3 调速转把角度为60%情况下轮毂电机的转速
将所得数据输入到SPSS软件,得到转把在各角度下的机械特性曲线模型。同时,对外特性曲线模型进行线性分析,回归系数为0.996,得到其外特性线性关系为n=446.835-3.848T,其空载最高转速为446.835r/min,抱死最大扭矩为116.121N·m。在T=58 N·m、n=222.5r/min时,存在最大输出功率1.496kW。
3 主减速比的计算
履带运输机的主减速比出现在履带运输机在最大爬坡角度且满载工况下,为满足其动力性设计指标而需要的传动比。为了计算主减速比,必须分别计算驱动轮和电机的转速。履带运输机的传动路线如图2所示。该型履带运输机采用左右两条履带分别由两个独立电机驱动的方式,国内已经有相关学者对这一传动方式展开了相关研究,并取得了一定成果[11-13]。该型履带运输车的设计指标如表4所示。
根据给定的设计指标,履带f2运输机在以最大角度爬坡且满载时,其总质量为
M=M0+M2
其中,M为履带运输机以最大角度爬坡且满载时的总质量(kg)。
单边履带受到驱动轮的驱动力为
其中,F为单边履带受到驱动轮的驱动力(N)。
单边驱动轮的输出功率为
其中,P驱为单边驱动轮的输出功率(kW)。
单边电机需要输出的功率为

其中,P电为单边电机需要的输出功率(kW)。
根据上式,得到轮毂电机所需输出功率为0.868kW,驱动轮的设计转速为96r/min。

1.轮毂电机 2.链传动 3.驱动轮
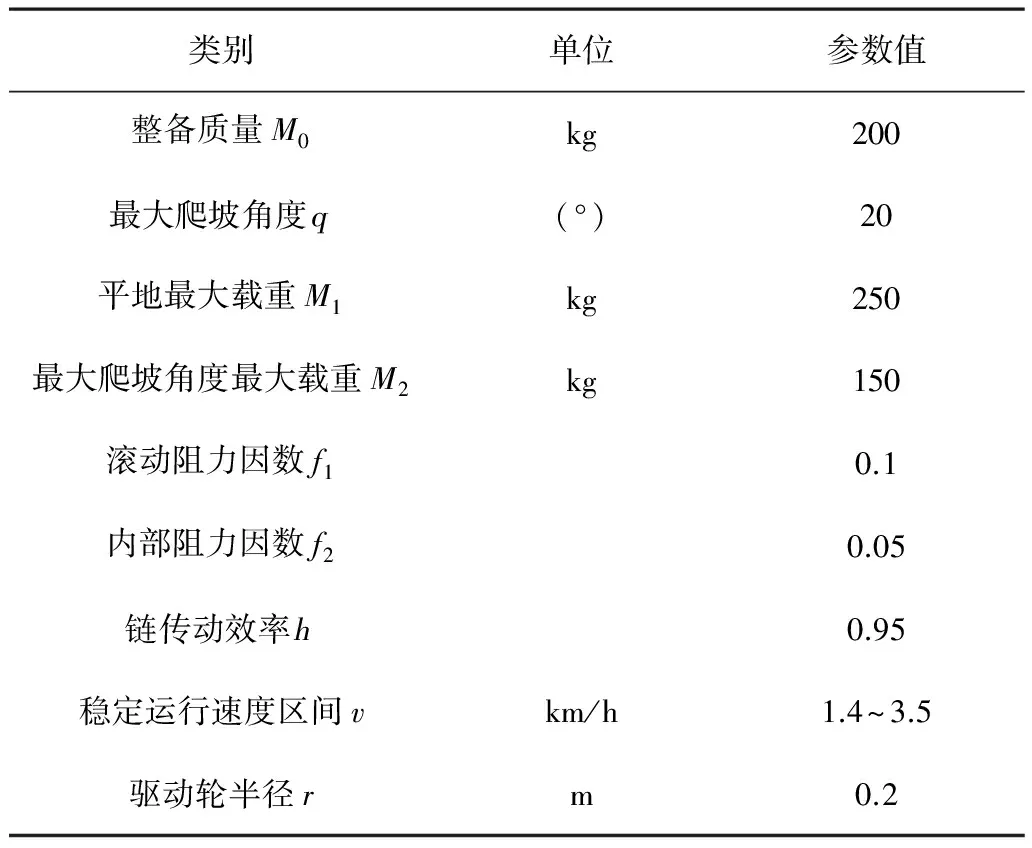
类别单位参数值整备质量M0kg200最大爬坡角度q(°)20平地最大载重M1kg250最大爬坡角度最大载重M2kg150滚动阻力因数f10.1内部阻力因数f20.05链传动效率h0.95稳定运行速度区间vkm/h1.4~3.5驱动轮半径rm0.2
由于轮毂电机属于无刷直流电机,其调速原理为降压调速,电压大小通过霍尔调速转把控制[14],调速转把转过的角度越大,通过电枢的等效电压越高,电机转速越快。无刷直流电机的降压调速特性曲线[15]如图3所示。从图3可以看出:无刷直流电机降压调速特性曲线为一组斜率为负的平行线,电压越低,相同转速情况下,其输出转矩越小。台架试验结果如图4所示。试验所得曲线模型近似为1组斜率为负的平行线,说明试验结果与理论模型相吻合,试验存在一定的合理性,且电压越高,试验结果与理论模型愈加相似。根据图3可绘制出在调速转把各角度情况下电机的输出功率曲线示意图,如图5所示。其功率输出曲线为1组二次函数曲线,转把角度越大,等效电压越高,最大输出功率也就越大,且最大输出功率是在输出转矩为最大转矩的1/2时取得。根据图5及试验所得外特性曲线模型可知:电机在调速转把角度达到100%时,有最大输出功率1.496kW,超过设计指标下履带运输机需要的最大功率0.868kW。因此,当履带运输机在极限工况下运行时,调速转把不需要转到底,仍有部分剩余角度,此部分角度可用来加速或爬坡,即相当于后备功率[16]。根据得到的电机外特性模型及无刷直流电机调速特性曲线模型推算,当电机的最大输出功率为0.868kW时,调速转把刚好转至79.9%的位置,此时电机的转速为179r/min,扭矩为46.432 Nm,仍有20.1%的角度用于后备功率。因此,主减速比为
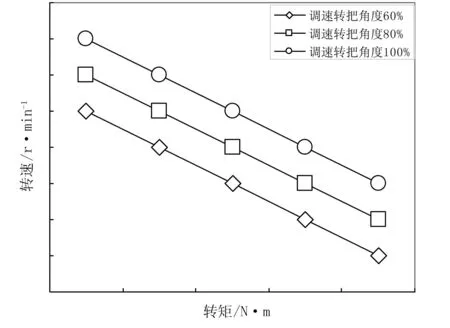
图3 无刷直流电机降压调速特性曲线
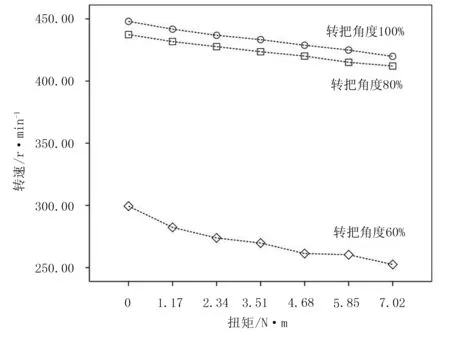
图4 台架试验所得电机调速机械特性曲线

图5 调速转把各角度电机输出功率特性曲线示意图
4 结论
针对山地果园履带运输机的主减速比的计算,设计了一款简易台架实验装置。通过台架试验,得到的轮毂电机的外特性机械特性曲线模型,其相关系数为0.996;然后通过计算履带运输机在极限功率输出情况下所需的电机功率,推算出最大输出功率恰好为这一功率的情况下,电机的转速为179r/min,又已知驱动轮的设计转速为96r/min,从而求得履带运输机的主减速比为1.86。通过台架试验得到的模型与理论模型对比可知:试验得到的模型与理论模型相近,说明了台架设计的合理性。但在试验过程中,拉力加载的范围还不够大,且到低电压情况下,模型的波动开始增大。此外,该主减速比的选择仅是为了满足履带运输机的动力性要求,未考虑电机是否在其高效区间运行。因此,为了得到使电机能耗最低的最优主减速比,仍有待进一步的研究。
[1] 洪添胜,张衍林,杨洲.果园机械与设施[M].北京:中国农业出版社,2012:143-147.
[2] 吴伟斌,赵奔,朱余清,等.丘陵山地果园运输机的研究进展[J].华中农业大学学报,2013,32(4):135-142.
[3] 师永强,穆希辉,杜峰坡,等.履带搬运车传动系统设计与匹配[J].起重运输机械,2010(9):16-18.
[4] 杜蒙蒙,姬江涛,杜新武,等.丘陵山区双履带式小型动力底盘的设计[J].农机化研究,2013,35(9):116-119,124.
[5] 朱余清,洪添胜,吴伟斌,等.山地果园自走式履带运输车抗侧翻设计与仿真[J].农业机械学报,2012,43(z1):19-23.
[6] 张季琴,杨福增,刘世.微型履带拖拉机牵引附着性能研究—基于正交试验[J].农机化研究,2013,35(10):190-193,198.
[7] 刘东琴,杨福增,孙立江,等.一种山地动力底盘的结构设计及坡道转向动力学分析[J].拖拉机与农用运输车,2013,40(06):35-37.
[8] 洋马ディーゼル株式会社.履帯形走行運搬車:日本,2000272553A[P].2010-10-3.
[9] 张培君.电动自行车电机的分类与特点[J].电动自行车,2012(4):47-48.
[10] 荆会彦,何文辉,楼婷婷.基于位置传感器的无刷直流电机机械特性测试研究[J].科学技术与工程,2014,14(8):15-18.
[11] 陈树勇,孙逢春,张承宁.电传动履带车辆动力性能协同仿真与试验研究[J].系统仿真学报,2007,19(6):1370-1375.
[12] 邹渊,孙逢春,张承宁,等.履带车辆双侧电机驱动系统匹配设计[J].北京理工大学学报,2008,28(1):41-44.
[13] 李剑,孙逢春,高石,等.双电机独立驱动的履带车辆坡转性研究[J].计算机仿真,2009,26(12):221-225.
[14] 庞立江,张玉凤.浅谈电动自行车速度控制原理[J].石家庄联合技术职业学院学术研究,2007, 2(4):15-17.
[15] 秦曾煌.电工学[M].北京:高等教育出版社,2004:250-251.
[16] 余志生.汽车理论[M].北京:机械工业出版社,2006:30-32.
Bench Test of Mountainous Orchard Crawler Transporter
Zheng Penglina, Zhu Yuqinga, Hong Tianshenga, Wu Weifenga, Cai Jiajiea, Liu Yueb
(a.College of Engineering; b.College of Electronic Engineering, South China Agricultural University, Guangzhou 510642, China)
Because of hub motors were used as the power source of the mountainous orchard crawler transporter and increased the torque by chain, to calculate the main reduction radio, a bench was designed to obtain the mechanical characteristics of the motors. The mechanical characteristic curves of the motor was obtained by the SPSS software, and the model of the external characteristic curve of the motor was n=446.835-3.848T. According to the design index, the required power of the crawler transporter under extreme condition is 0.868kW. At this power output, the corresponding rotational of the motor was 179 r/min, according to the speed and output power characteristics of Brushless DC Motor. The main reduction radio was 1.86 when the design speed of the driving wheel was 96 r/min. The study can provide reference for the design of mountainous crawler transporter.
hub motor; bench test; main reduction radio; crawler transporter; mountainous orchard
2015-12-17
公益性行业(农业)科研专项(201203016);现代农业产业技术体系建设专项(CARS-27);广东省“扬帆计划”引进创新创业团队专项(201312G06)
郑鹏淋(1993-),男,浙江磐安人,硕士研究生,(E-mail) molinxiaozi@163.com。
洪添胜(1955-),男,广东梅县人,教授,博士生导师,(E-mail)tshong@scau.edu.cn。
S229.+1
A
1003-188X(2017)01-0192-05
