猕猴桃采摘机器人柔性移动平台的设计
2017-12-15陈子啸刘亚东崔永杰
陈子啸,王 滨,刘亚东,崔永杰
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
猕猴桃采摘机器人柔性移动平台的设计
陈子啸,王 滨,刘亚东,崔永杰
(西北农林科技大学 机械与电子工程学院,陕西 杨凌 712100)
针对猕猴桃采摘机器人在果园中的移动问题,结合猕猴桃棚架式栽培模式及采摘机器人的作业特点设计了一种用于猕猴桃采摘机器人的柔性移动平台。首先,分析了猕猴桃棚架式生长环境及种植模式的参数特点,阐述了移动平台的作业要求以及其整体结构。其次,对该平台的高度调解机构建立几何模型,利用MatLab进行了力、角度等参数的分析计算,研究其高度调节范围和连杆角度的变化关系、液压缸的最佳安装点和调节极角。最后,利用ANSYS WORKBENCH在危险点对关键机构利用进行强度校核。本研究完成了柔性移动平台的总体设计,得出了平台作业的调节极角,通过对高度调节机构的分析校核,结果满足平台的作业要求。
柔性移动平台; 高度调节机构; 四轮独立导向;采摘机器人;猕猴桃
0 引言
采摘是果蔬生产链中费时费力的环节之一,且季节性强、劳动强度大。中国是世界上猕猴桃栽培面积最大的国家,大力推广棚架式栽培模式有利于猕猴桃的综合管理。由于其采摘时间相对集中且较短,需要大量的人力,因此已有科研人员开始研究开发猕猴桃自动采摘机器人[1]
近年来,国内外学者在果蔬采摘机器人方面做了大量的研究工作[2],研制了多种农用机器人移动平台。例如,中国农业大学秦衡研制了一种适用于丘陵山区作业的全地形农用车辆[3]。华南农业大学罗锡文研制的用于精细农业的智能平台[4],其机械子系统采用的是两个前轮独立驱动方式,靠驱动电机转速的不同实现转向。巴西的Eduardo Paci∧encia Godoy与巴西农业仪器研究公司等科研机构开发的网络控制的四轮导向精细农业移动机器人[5],该农业机器人工作平台特点是四轮独立驱动以及独立转向。瓦赫宁根大学的T.Bakkert和J. Bontsema等人试制的用于田间杂草识别的移动平台样机,采用四轮独立驱动[6],四轮转向也让移动平台在田间有更大的灵活性。这些移动平台主要针对田间作业,与猕猴桃棚架式栽培模式的作业环境不同、而且对移动平台的稳定性和柔性要求有所差异。
综上所述,提出了猕猴桃采摘机器人柔性移动平台的方案。该平台采用四轮独立转向的导向方式,可以在果园内部进行原地小半径转向 ,提高了平台在果园中的机动性;由轮毂电机提供行走动力,环保节能;并配备有水平调节机构,可实现对不平整地块的仿形的同时,保持平台稳定性和上部车体水平,提高了平台的作业柔性。
1 猕猴桃采摘机器人的工作环境
本文所设计的猕猴桃采摘机器人移动平台适用于规范化种植的猕猴桃棚架式结构。猕猴桃属于藤蔓植物,果实生长需要搭架,目前最普遍的结构是棚架式,结构相对规整。猕猴桃果树的种植模式,如图1所示。棚架是由铁丝搭建而成的网架结构,果树枝条沿铁丝网生长,果实自然下垂。猕猴桃果树的行间距为400cm,株间距为300cm,果实成熟之后均匀分布在铁丝上,高度分布在130~170cm之间;果园内的地形环境较为复杂,存在低洼凸起的路况[1]。
考虑到采摘机器人的采摘方式,移动平台应用间歇式行走的作业方式,轮毂电机相对于其他的动力装置,适宜频繁启停,而且控制精确方便,噪音污染也较小。由于果园空间限制,平台的转弯半径不宜过大,所以采用可全向转弯四轮独立转向方式,提高了平台的机动性和灵活性。
作业时,平台沿果园单侧间歇式运行,当行走到目标果实处即需采摘果实的区域内,制动停车,等待采摘机器人作业完毕。由于果园地形环境复杂,采摘季节地面不甚平整,存在低洼以及凸起的地形条件,而且平台上的猕猴桃信息感知及采摘设备需要较高的平衡性和稳定性,所以需要平台具有四轮独立的水平调节仿形机构。

图1 猕猴桃棚架式栽培模式现场图
2 移动平台的总体结构
2.1 总体结构
基于猕猴桃的棚架式栽培模式,设计了用于猕猴桃采摘的柔性移动机器人平台。其采用四轮独立导向方法,能在小范围内实现小半径的自由转向,且具备调整平台姿态的水平调节仿形机构以适应复杂的作业环境。
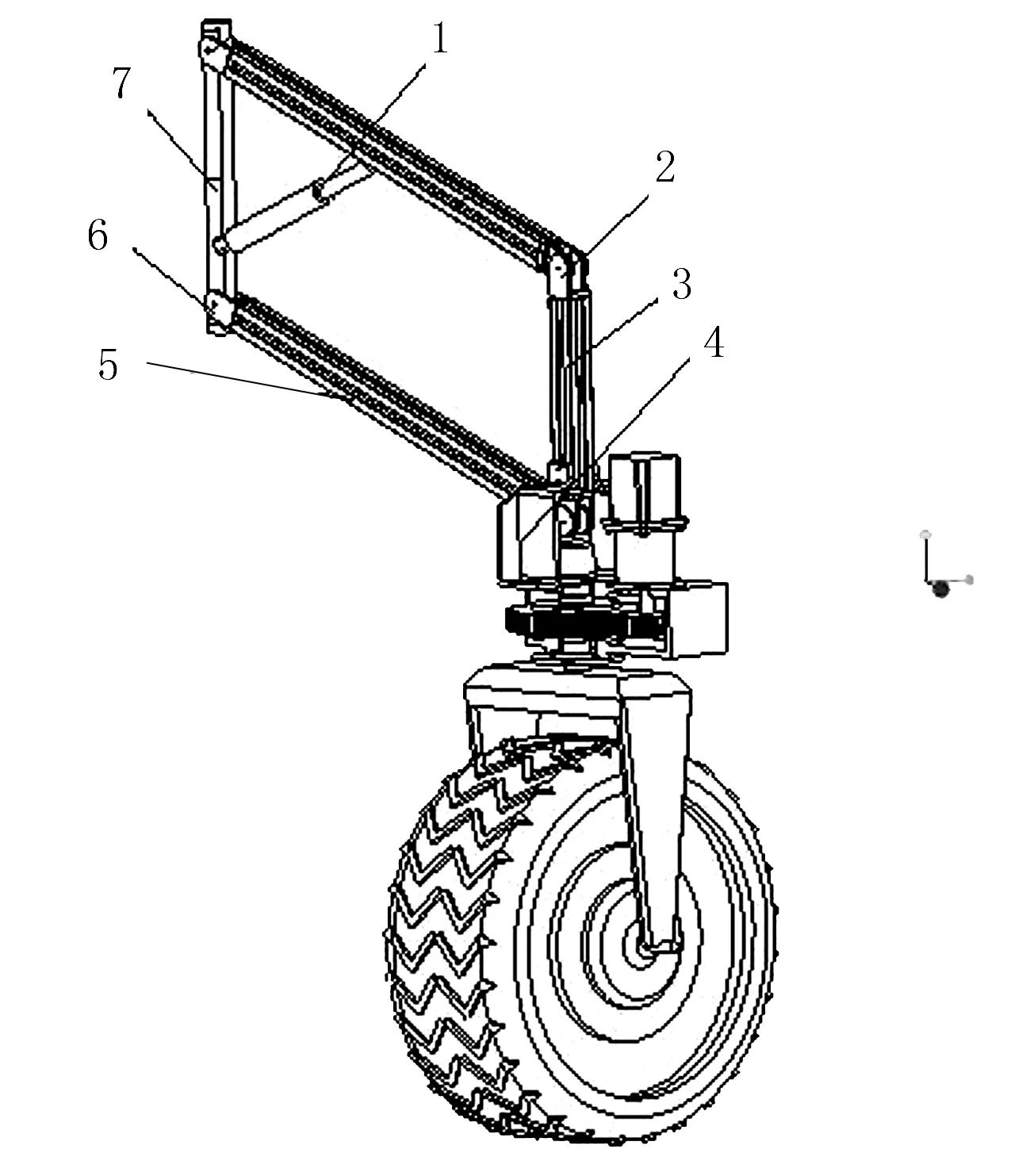
结合上述功能要求,设计的猕猴桃采摘机器人移动平台整体结构,如图2所示。其主要由车身主体、水平调节仿形机构、四轮独立转向机构、轮毂电机及轮胎组成。车身主体主要安装猕猴桃采摘机器人,放置电源及控制器。

1.安装云台 2.控制器 3.平台主体 4.转向驱动机构 5.轮毂电机 6.轮胎 7.高度调节机构
水平调节仿形机构由4个独立高度可调的腿部结构组成,考虑到平行四杆机构运动平稳,相对杆角位移、速度、加速度始终相等[10],满足平台能平稳的进行水平调节要求,故采用平行四杆机构,由液压缸提供调节动力。
四轮独立转向是由4个独立的转向动力输出装置组成,可实现四轮独立的任意角度转向,转向角度合理分配由转向控制器根据运动学模型完成,每个动力输出装置都配备有旋转编码器,来监测预期旋转角度与实际旋转角度的偏差。
高度调节机构由机架、摇杆、连架杆、连杆及液压缸组成,如图3所示。其中,机架与车身主体通过销钉固连,摇杆通过铰链和机架的上部安装点连接,连架杆通过铰链和机架的下部安装点连接,液压缸的一端通过铰链安装在机架中部铰链连接点上,另一端通过铰链与摇杆连接。四杆机构的机架固连在车身主体上,使得腿部结构车身主体成45°夹角,4个腿部结构分别安装在车身4个角上,连杆与转向机构通过连接法兰固连。
1.液压缸 2.铰链Ⅰ 3.连杆 4.连接法兰Ⅰ 5.连架杆 6.铰链Ⅱ 7.机架
转向动力输出机构主要由电机、行星减速器、主动齿轮、从动齿轮、滚动轴承、套筒、轴、轴承盖、安装壳及旋转编码器构成,如图4所示。
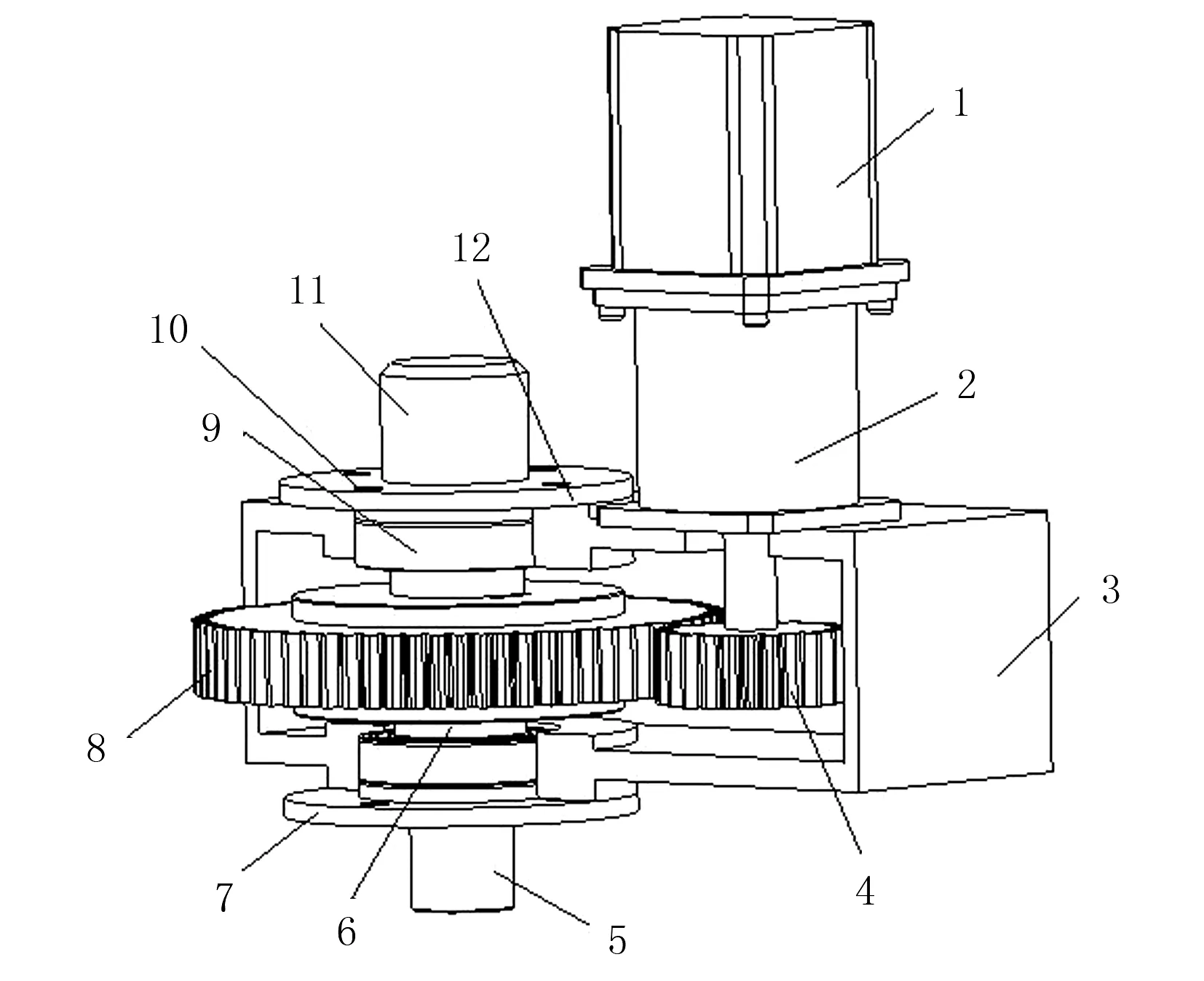
1.电机 2.行星减速器 3.安装壳 4.主动齿轮 5.主轴 6.套筒 7.下轴承盖 8.从动齿轮 9.滚动轴承 10.上轴承盖 11.旋转编码器 12.凸台
图4 转向动力输出机构
其中,电机与行星减速器连接,固连在安装壳上,输出扭矩通过主动齿轮传输给从动齿轮,从动齿轮安装在轴上,轴上下安装滚动轴承,轴承两端分别用轴承端盖紧固;轴上端安装旋转编码器,下端转向动力输出与轮毂支架连接。
2.2 工作原理
转向工作原理,如图5所示。其中,导向控制模块具有分配各轮转角、数模转换及反馈调节等功能。根据四轮独立转向的阿克曼转向模型,导向控制模块的主控制器计算出满足该模型的各个轮子的转角, 分别传输给4个转向电机的控制器,控制器通过PWM波控制电机的旋转角度。电机旋转扭矩通过行星变速器放大,传送到主动齿轮,进而传送到从动齿轮,带动主轴转动;主轴转动的输出扭矩作用到轮毂支架上,实现轮子转动预定的角度。与此同时,主轴上端带动旋转编码器的输入轴转动(具体机构可参照图4),旋转编码器将主轴的实际旋转角度转变成模拟信号反馈给控制器,与预期的旋转角度比较,实现精确闭环控制。
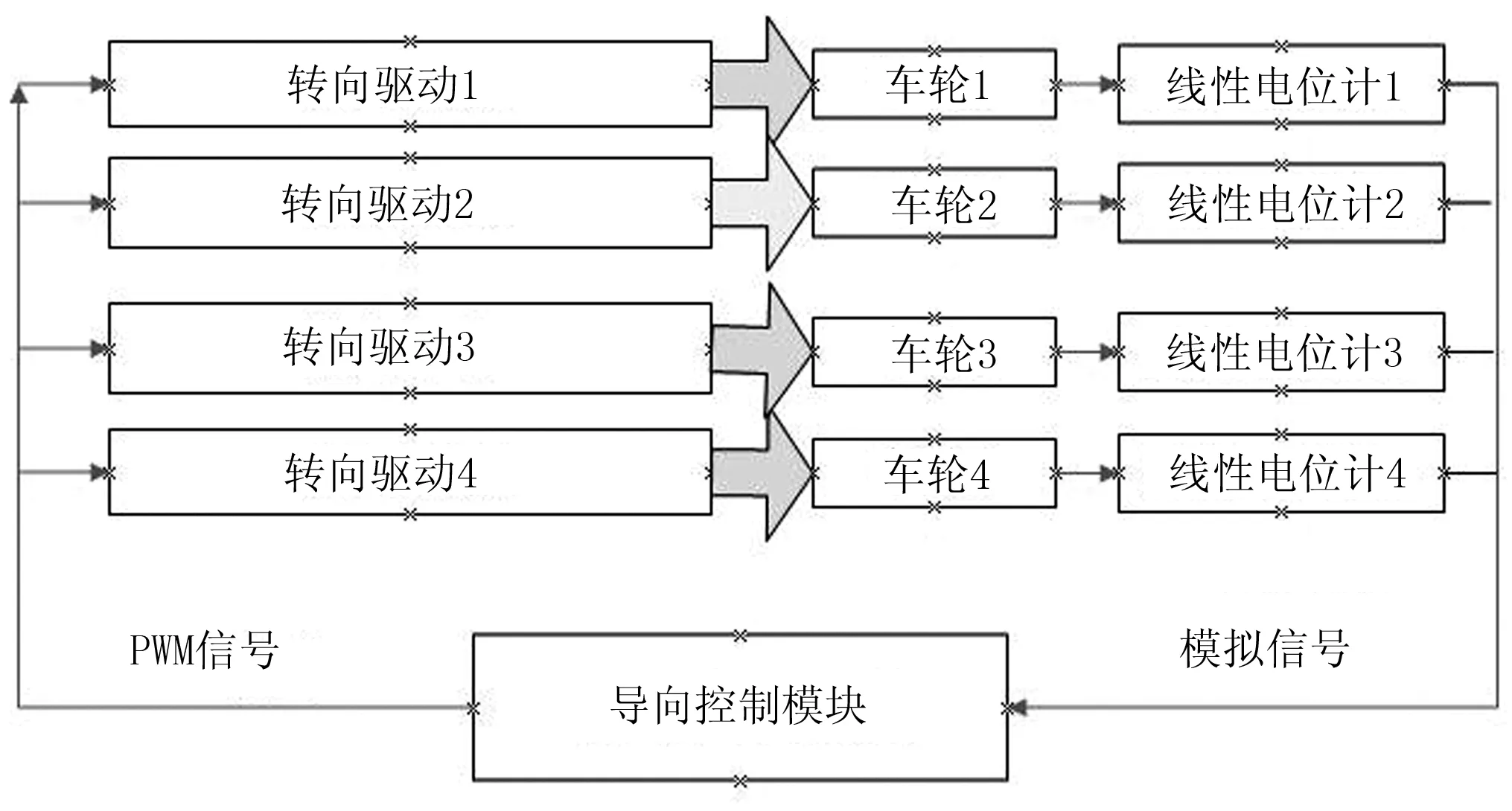
图5 转向工作原理概念图
水平调节仿形机构工作原理:移动平台可整体抬高或降低平台主体的高度,也可根据地形条件仿形调整腿部结构,以保证平台主体的水平,从而保证以平台为载体的信息采集传感器以及采摘机器人的作业精度。图6为平台高度调整示意图。当作业需要调整整体高度或某个腿部机构的高度时,主控制器计算需调整的高度,通过4个独立的液压比例电磁阀控制4个液压缸的伸长或缩短,从而达到4个腿部机构高度的独立调整。
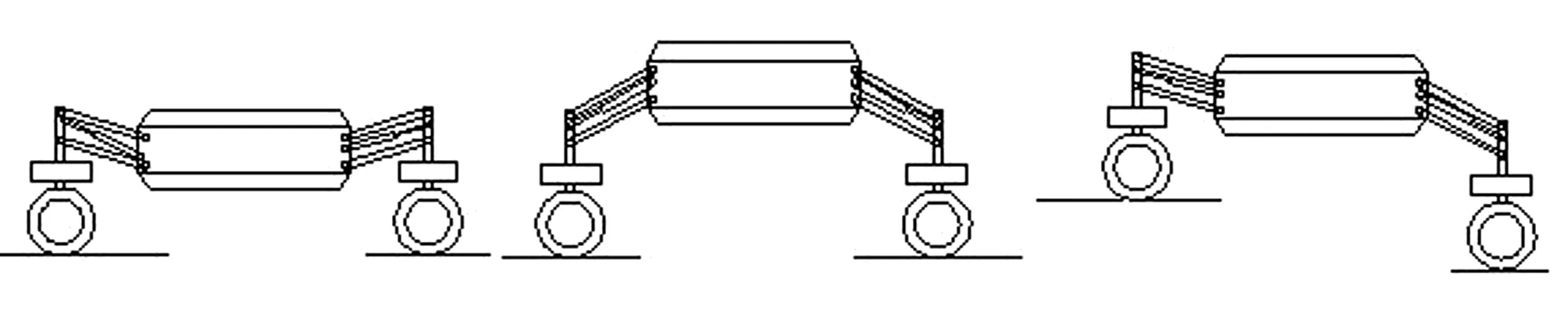
图6 高度调节效果图
3 主要工作部件研究
3.1 高度调节机构几何模型
平行四杆机构运动平稳,相对杆角位移、速度、加速度始终相等,满足平台能平稳地进行高度调节要求[7-8]。因此,高度调节机构选用平行四杆机构,由液压缸提供动力。为了计算高度调节值与连杆运动参数之间的关系,对其构造几何模型,如图7所示。其中,GB为液压缸,AE为机架,CD为连杆;AB1C1D1E为初始姿态,AB2C2D2E为调节后的姿态。
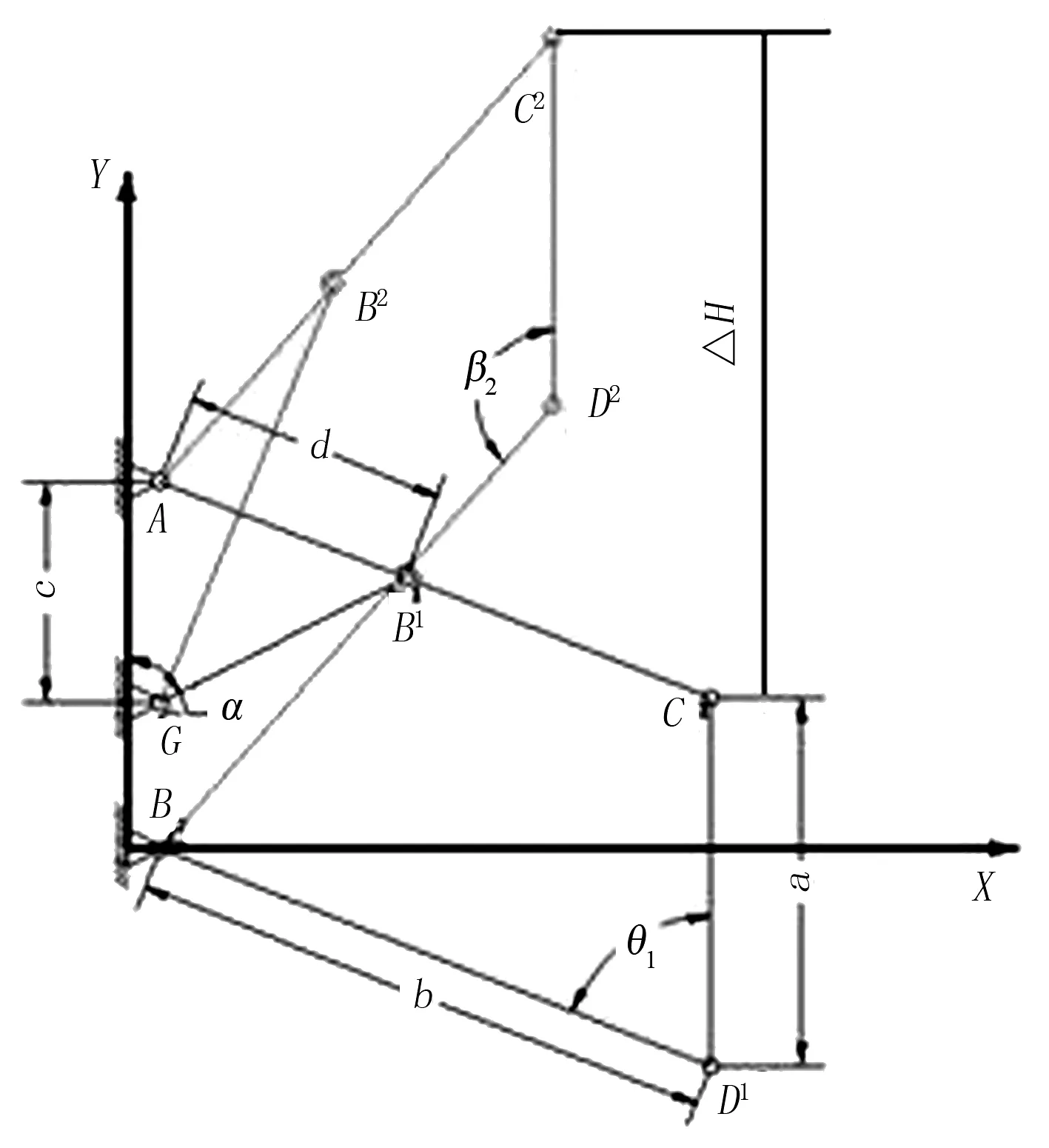
图7 高度调节范围分析简图
假设每个调高机构实时性相同,则可以对单个机构进行几何建模,可根据几何模型得到调高机构高度H变化量ΔH与机构姿态决定角θ变化量Δθ的关系。
(1)
式中a—连杆的长度;
b—连架杆的长度;
c—液压缸在机架上安装点距离机架上铰链的距离;
θ1—初始姿态时下连架杆与连杆之间的夹角;
θ2—高度调节后下连架杆与连杆之间的夹角。
(2)
高度调节机构的调高范围ΔΗ=ΔY=-bcosθ2+bcosθ1。
为了使高度调节方便液压缸安装,且满足高度调节范围要求,高度调节机构极角θ1与θ2选取互补的一对角度。

人们都说,相声是语言艺术,愚以为相声是表演艺术,而评书是语言艺术。学者张卫东先生曾说:“说书人和读书人的祖师爷都是孔子。说书的不是艺人,是先生。”作为评书艺术家的单田芳,同样是大众语言大师,他是东北版的老舍。
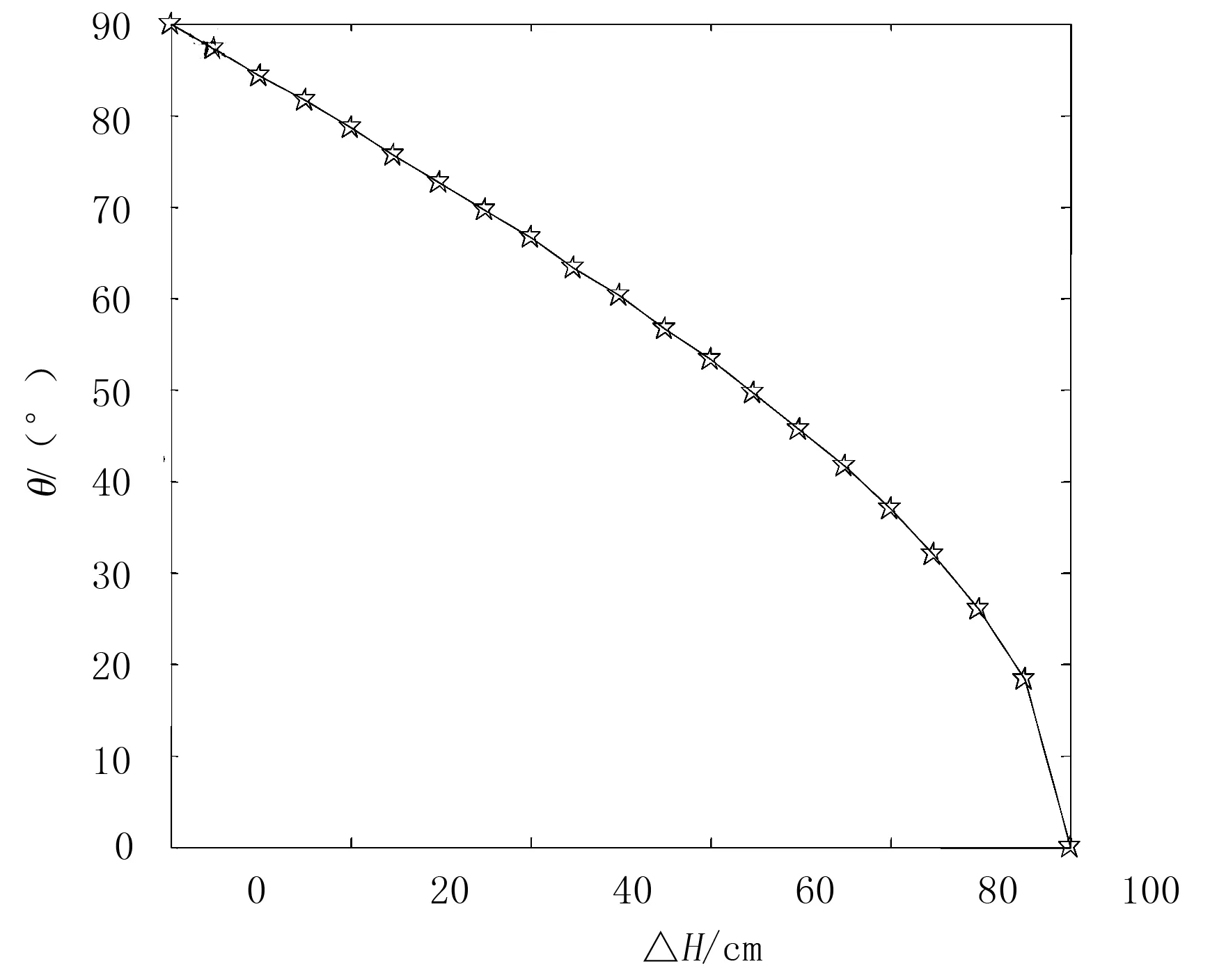
图8 高度调节范围ΔΗ与θ1之间的关系
3.2 高度调节机构力学研究
高度调节机构承载了整个平台的质量,有必要对其进行力学分析,以确定动力液压缸最佳的安装点从而使其在高度调解过程中承受最小的压力。结合高度调节范围分析简图(见图7),对个腿部进行受力分析[9-10],如图9所示。

图9 高度调节机构力学分析简图
由图9的力学模型、结合几何关系,可得到
(3)
式中a—连杆的长度;
b—连架杆的长度;
c—液压缸在机架上安装点距离机架上铰链的距离;
d—液压缸在上连架杆安装点距离机架上铰链的距离;
θ—连架杆与连杆之间的夹角;
α—液压缸和机架之间的夹角。
由DC的受力分析,可以得到XC=0,FD=0,YC=F。
对整体受力分析,可以得到:
(4)
(5)
(6)
(7)
系数K决定了在高度调节过程中液压缸的受力大小,因此需要分析K的变化与安装点的变化关系。
对于规范化种植的猕猴桃棚架式结构,果园的行间距为400cm,棚架高度平均高度170cm,高度调节范围80cm。综合考虑以上数据,选取b=50cm,a=20cm,可以保证平台的行走通过性及满足采摘机器人的作业要求。

图10分别反应了在a、c取不同值时,K随θ变化的情况,通过3个变量的变化关系,选取合适的安装点,即合适的c、d值。
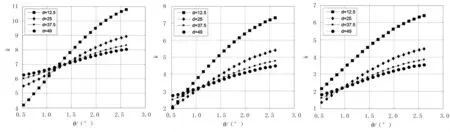
(a) c=7时k和θ的变化关系 (b) c=14时k和θ的变化关系 (c) c=19时k和θ的变化关系
3.3 有限元分析
为保证上架杆的强度和可靠性,需要对其进行有限元分析[11],将上连架杆的PROE三维模型通过中间格式IGES导入ANSYS软件进行应力分析。
1)材料属性定义:首先对杆件的材料属进行定义,材料选取铝制型材,其材料属性如表1所示。
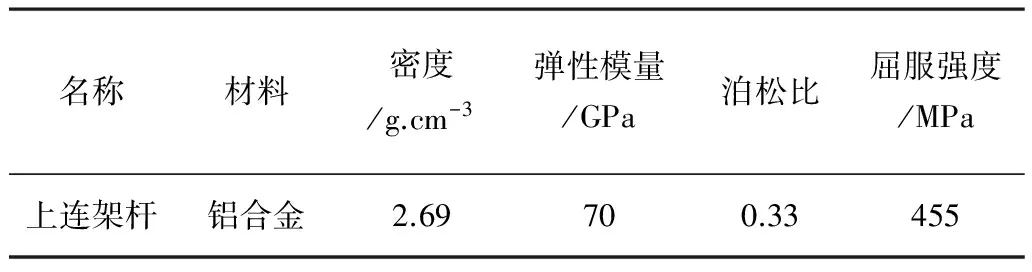
表1 上连架杆材料属性
2)网格划分:将杆件三维模型导入ANSYS WORKBENCH,采用扫略网格划分方法,该部件共划分75 484个单元,410 378个节点,最后得到的网格划分结果如图11所示。

图11 划分网格
3)定义载荷约束:安装点已经确定后,根据前面章节的受力分析就可以得到上连架杆的载荷约束状况。实际作业过程中,外加载荷F已知。由图11可知:当d=37.5、θ=5π/6 时各个点受力最大,发生破坏的可能性大,所以θ=5π/6 为危险点,而且是机器的作业极限点。在此位置进行强度分析,则有
(8)
根据以上各式可以求解各点的载荷状况,载荷加载位置如图12所示。
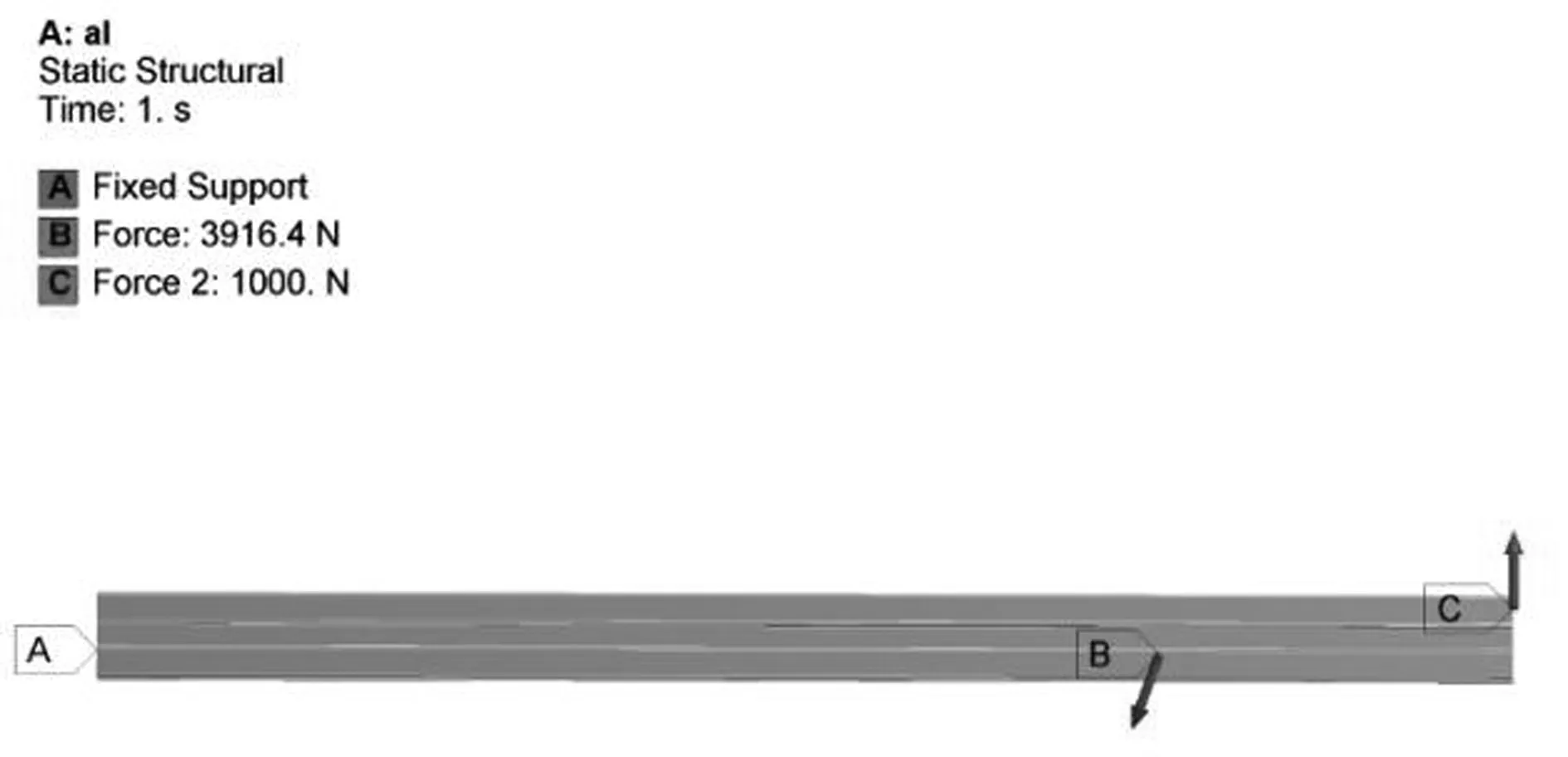
图12 定义载荷图
4)静力分析:采用程序自动控制方式,提高运算速度,得到应力云图如图13所示。

图13 上连架杆模型计算结果
分析结果显示:最大应力发生在固定端A处,符合实际受力情况。由于该位置分析时存在应力集中状况,最大等效应力值不具有参考意义,且该位置等效应力在选用的铝制型材材料屈服极限455MPa以内,满足设计要求。
观察分析结果,在上连架杆与平台主体连接处A点,即连架杆的局部上表面已经接近材料的屈服极限,考虑到机构的安全性,结合理论分析结果,在实际装配连接过程中,应该在该处采用加强结构以确保强度安全。
4 结论
1)针对猕猴桃标准化棚架式种植模式以及猕猴桃采摘机器人作业特点设计了一种机器人移动平台,具有高度可调及可四轮独立转向的特点,增加了平台的柔性和机动性。
3)对移动平台的调高机构进行力学分析,确定了动力液压缸的最佳安装点。高度调节在运动过程中,k关于θ正相关。为使k值在可取范围内最小,并满足安装空间,k取c=19cm。过计算分析,d值对k的影响及液压缸的安装问题,选取d=37.5。
4)各个点受力最大的条件下,利用ANSYS对上连接杆进行有限元分析,验证了设计的可靠性。结果表明:等效应力在选用的铝制型材材料屈服极限455MPa以内,并结合分析结果为实际装配中可能出现的问题提供了可行的措施。
[1] 李桢,王滨,陈子啸,等.基于MatLab的猕猴桃采摘机械臂运动学仿真研究[J].农机化研究,2015,37(12):227-231.
[2] 张立彬,计时鸣,胥芳,等.农业机器人的主要应用领域和关键技术[J].浙江工业大学学报,2002,30(1):36-37.
[3] 赵匀,武传宇,胡旭东,等.农业机器人的研究进展及存在的问题[J].农业工程学报, 2003,19(1):20.
[4] 罗锡文,区颖刚,赵祚喜,等.农用智能移动作业平台模型的研制[J].农业工程学报,2005,21(2):83-85.
[5] Godoy E P, Tangerino G T, Tabile R A, et al. Networked Control System for the Guidance of a Four-Wheel Steering Agricultural Robotic Platform[J].Journal of Control Science & Engineering, 2012, 2012(1). 10.
[6] Bak T, Jakobsen H. Agricultural Robotic Platform with Four Wheel Steering for Weed Detection[J].Biosystems Engineering, 2004, 87(2):125-136,125-136.
[7] 孙桓,陈作模.机械原理[M].北京:高等教育出版社,2006.
[8] 汤修映.平行四杆机构在点焊机器人中作用[J].中国农业大学学报,2003,8(4):36-40.
[9] 武清玺,冯奇.理论力学[M].北京:高等教育出版社,2003.
[10] 许平勇,曹鹏举.平行杆翻转举升机构及液压缸铰支点设计[J].起重运输机械,2008(5):23-25.
[11] 付宇飞,张淑敏.灌水开沟器的设计研究与有限元分析[J].农机化研究,2014,36(11):108-111.
Design and Research of Flexible Robotic Platform for Kiwi Fruit Harvesting Robot
Chen Zixiao, Wang Bin, Liu Yadong, Cui Yongjie
(College of Mechanical and Electric Engineering,Northwest Agricultural and Foretry University,Yangling 712100,China)
This paper developed a kiwi harvesting robot mobile platform that was suitable to kiwi’s standardized planting pattern and able to meet the work requirements of kiwi harvesting robot.Growing environment and canopy frame of standardized planting pattern in kiwi cultivating was surveyed and analyzed so as to obtain mobile platform’s work condition and design its whole mechanical structures appropriately.Specifically, the platform’s parameters of height adjustment mechanism was analyzed and calculated, to find out the relationship of angle and height range as well as the optimum mounting point of its driven hydraulic cylinder.Finally, the stress and strain of dangerous point on key part was analyzed using ANSYS WORKBENCH.
mobile platform; height adjustment mechanism; four independent steering; harvesting robot;kiwi fruit
2016-01-06
国家自然科学基金项目(61175099)
陈子啸(1990-),男,陕西渭南人,硕士研究生,(E-mail)chenzixiao1990@126.com。
崔永杰(1971-),男(朝鲜族),吉林图们人,副教授,博士生导师,(E-mail)cuiyongjie@nwsuaf.edu.cn。
S225.93;TP242.3
A
1003-188X(2017)01-0072-06
