马铃薯组培苗接种机器人信息管理系统的研究与实现——基于Web
2017-12-15程大鹏陆强强李元强
邵 东,程大鹏,辜 松,陆强强,李元强
(1.东北农业大学 工程学院,哈尔滨 150030;2.华南农业大学 工程学院,广州 510642 )
马铃薯组培苗接种机器人信息管理系统的研究与实现
——基于Web
邵 东1,程大鹏1,辜 松2,陆强强1,李元强1
(1.东北农业大学 工程学院,哈尔滨 150030;2.华南农业大学 工程学院,广州 510642 )
组培苗自动接种机器人在工作过程中,需要一套信息管理系统,其功能包括对员工和客户的信息、组培苗培养条件、测量数据、来源及组培室进行管理。为此,通过设计数据库,利用PHP和AJAX技术创建动态网页,建立信息管理系统,以Web形式对外发布,并采用条形码技术进行数据的记录、储存与传递。根据机器人生产过程系统建立5个功能模块,可以实现记录组培苗培养条件、测量数据、评价组培苗机械作业性能,以及对组培苗进行追溯管理等功能。该系统能解决机器人生产过程中数据记录繁杂问题,并能有效提高记录的准确性,可以为组培苗生产单位提供支持。
组培苗;机器人;信息管理;条形码技术;追溯;马铃薯
0 引言
植物组织培养即植物无菌培养技术,是利用植物离体的器官、组织、细胞或原生质体,在无菌环境中结合人工培养基、光照、温度等人工条件,诱导出愈伤组织、不定芽、不定根,最后形成完整植株的技术[1]。繁殖分化是植物组织培养生产过程中关键的阶段,该阶段的实现称为组培苗的分割移植生产。目前,组培苗的分割移植生产仍以人工作业为主[2],存在着效率低、强度大、易感染等问题;而组培苗接种自动生产装备不仅能解决上述问题,还能推动组培苗工厂化培育的步伐。
1991年,日本东芝公司开发了基于视觉的组培苗自动接种机器人, 适用于马铃薯、 康乃馨等条状组培苗作物[2]。1992年,日本Komatsu公司研发了适用于条状组培苗快速移植机器人系统[3]。2015年,屈哲、来杭生等开发了广口瓶整瓶马铃薯组培苗剪切机构,该机构采用类似Komatsu接种机器人系统的工作方式[4]。华南农业大学辜松教授将研发基于单向视觉的多手臂组培苗自动接种机器人。为了更好地管理机器人生产过程,笔者设计了一套信息管理系统。
目前,信息管理系统的应用主要是在环境控制和组培苗生产方面:如梁欣婷、钮旭东等设计开发了组培室的环境控制与追溯管理系统[5];商龙、阮俊瑾等设计了组培室生产管理与环境控制系统[6];陈瑶、陈光彩等开发了可追溯植物组培苗生产管理系统[7]。为此,结合条形码技术设计了一套基于Web的信息管理系统以配合辜松教授研发的组培苗接种机器人,该系统还可以分析组培苗机械作业优劣性,能够帮助组培苗生产单位培育出更适合接种机器人工作的组培苗。
1 系统方案设计
1.1 系统运行平台
系统采用PHP(PHP: Hypertext Preprocessor)脚本语言和AJAX(Asynchronous JavaScript And XML)技术创建交互式动态网页,使用SQL server 数据库,以Web形式对外发布。
1.2 系统功能模块划分
信息管理系统以Web形式对外发布,工作人员可以同时应用该系统对不同的生产环节进行数据记录和查询。每个生产环节拥有独立的数据库表格,各个表格的设计均符合组培苗生产过程更新记录的要求,记录各代组培苗的数据库表格之间存在联系以达到可追溯的效果。系统的模块划分,如图1所示。
1.2.1 系统登录模块
登录到系统中,通过用户名和密码验证员工的权限,由此区分员工能使用的功能,如普通员工可以使用各生产阶段的数据记录、修改及删除等功能;高级员工可以对组培苗培育信息进行分析、员工管理及客户管理。通过设置验证码的方式防止系统被恶意攻击。
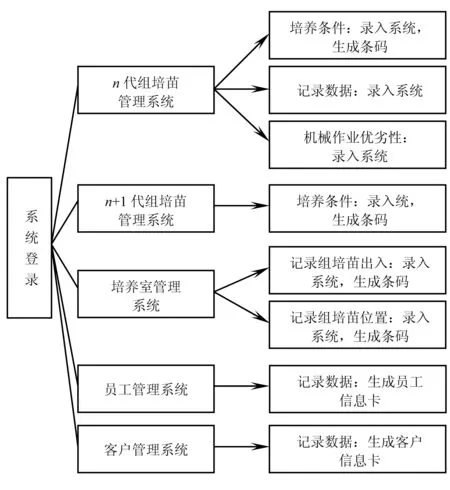
图1 信息管理系统功能模块
1.2.2 n代组培苗管理模块
定义机器人切割前的完整组培苗为第n代组培苗。
该模块包括3个功能,分别为位于系统前台的培养条件记录功能、生长状态记录功能,以及位于系统后台的组培苗机械作业性能优劣性分析功能。培养条件记录功能是普通员工在组培苗培养过程中将培养条件(如培养基类型、光照强度、温度、发育出生长点时间等)录入系统,生成条码;生长状态记录功能是在切分阶段前,将n代组培苗的生长状态(如组培苗的株高、茎秆直径、生长点个数等)自动录入系统;组培苗机械作业性能优劣性分析功能是高级员工在后台对n代组培苗的生长状态数据进行分析,分析结果自动录入系统。工作人员工作时只需要扫描员工信息卡,然后输入需要记录的数据即可,可以按照数据库字段检索特定的记录,也可以根据选定的日期,结合员工信息分别生成各阶段工作信息的统计报表[7]。
1.2.3 n+1代组培苗管理模块
定义切割后具有单个生长点的小段组培苗为第n+1代组培苗。
该模块位于系统前台,工作人员扫描员工信息卡,扫描培养基条码,输入n+1代组培苗的培养条件信息,如光照、温度等,生成新的条形码。在后续培养过程中,当涉及培养条件(如更换培养基、改变光照强度等)变化和组培苗生长状态(如生根、出现生长点等)变化时,需要工作人员对条形码进行记录更新,数据将自动录入系统。可以按照数据库字段检索特定的记录,也可以根据选定的日期,结合员工信息与工作信息生成统计报表。
1.2.4 培养室管理模块
该模块位于系统前台,包括两个功能,分别为组培苗位置的记录与组培苗出入架的记录。前者是为了使工作人员更方便、快捷地找到需要的组培苗;后者是为了了解培养架的空缺情况,以便于新组培苗的放置。入架时需要扫描组培苗条码,输入在培养架的位置(如第1培养室,第1培养架,第1层),输入数量,输入后系统自动更新数据至数据库中;出架时需要扫描组培苗条码,输入数量,输入后系统自动更新数据至数据库中。
1.2.5 员工管理模块
该模块位于系统后台,是对员工的基本信息进行综合管理,生成员工信息卡。员工信息卡上有员工照片及包含员工信息的条形码。
1.2.6 客户管理模块
该模块位于系统后台,主要对客户信息进行综合管理。
1.3 数据库设计
为了能够生成整体的数据库概念,根据组培苗接种机器人的生产流程,设计系统E-R图,如图2所示。根据系统的模块划分与E-R图,建立8个数据库表格。
1)登录表:包括登录名(员工工号)、登录密码等字段。
2)培养条件表:包括组培苗数量、光照强度、温度、生根时间、生长点出现时间、组培苗来源及条码代号等字段。
3)测量数据表:包括茎秆直径、株高、生长点个数、条码代号等字段。
4)机械作业优劣性表:包括组培苗机械作业优劣性、条码代号等字段。
5)组培苗位置表:包括组培苗代码、组培苗在组培室中的位置等字段。
6)组培苗出入架表:包括组培苗代码、出入架数量、出入架日期等字段。
7)员工表:包括工号、姓名、性别及条码代号等字段。
8)客户表:包括客户单位、地址及联系方式等字段。
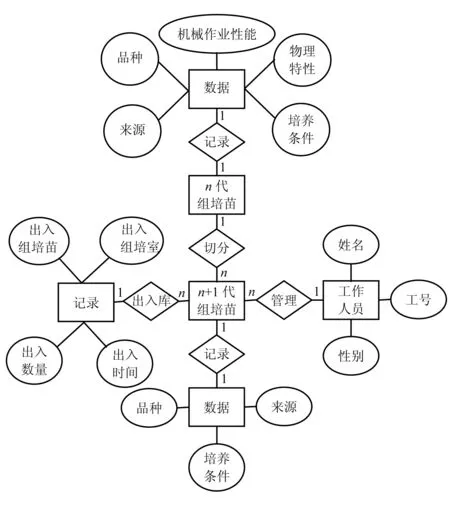
图2 数据库E-R图
2 评价体系
组培苗机械性能优劣性与组培苗自身的生长状态有关,如株高、茎秆直径及生长点个数等。各个生长状态对组培苗的影响存在联系,普通方法不容易建立起一个精确的评价模型;而BP神经网络可以描述生长状态不确定、多输入等复杂的非线性特性,主要应用在函数逼近、模糊识别、数据压缩及分类4个方面[8-9]。
评价系统选取株高、茎秆直径和生长点个数3个因素,所以输入层的节点个数为3。为了细化组培苗机械性能等级,将其分为3级,目标输出模式为(001)、(010)和(100),分别对应一般、良好和优秀,因此输出层节点个数为3。隐含层节点数目不宜过多,也不宜过少,否则会降低网络的非线性预测性能,根据公式
(1)
n=log2h
(2)
其中,n为输入层节点个数,h为隐含层节点个数,m为输出层节点个数,a为1~10的任意整数。由式(1)得出隐含层节点个数h为4~13,由式(2)得出h= 8,所以设定网络隐含层节点个数为8[10]。选取隐含层的激活函数为tansig函数,即
(3)
输出层的激活函数为logsig函数[9,11],即
(4)
使用三层BP网络的组培苗机械作业优劣性评价模型,如图3所示。

图3 组培苗机械作业优劣性评价模型
对于三层BP神经网络,X表示输入;Wij和F1表示输入层到隐含层的权向量及隐含层的激活函数,其输出函数可表示为
Oj=F1(WijXi-qj)
(5)
其中,Vjk和F2表示隐含层到输出层的权向量及输出层的激活函数,其输出函数可表示为
Yk=F2(VjkOj-qk)
(6)
网络的期望输出tpi和计算输出Opi之间的差值为计算误差Eq,其公式为
(7)
而BP神经网络的学习过程主要就是连接下层节点和上层节点之间的权值矩阵Wij的设定和误差修正过程,其学习模型为
ΔWij(n+1)=h×φi×Oj+a×ΔWij(n)
(8)
其中,h为网络的学习因子;φi为输出节点i的计算误差;Oj为输出节点j的计算输出;a为动量因子[8]。
选取1组组培苗数据,如表1所示。将数据输入到训练好的BP神经网络中并得到评价结果,如表2所示。
结果表明:1号组培苗中最大的数据为第3项的0.646 6,其余两项均远小于第3项,可以确定1号组培苗的机械作业性能为一般;2号组培苗的第2项为最大值0.984 1,其余两项均远小于第2项,可以确定2号组培苗的机械作业性能为良好;同理分析可得到,3号和4号组培苗的机械作业性能分别为良好和优秀。

表1 样本数据
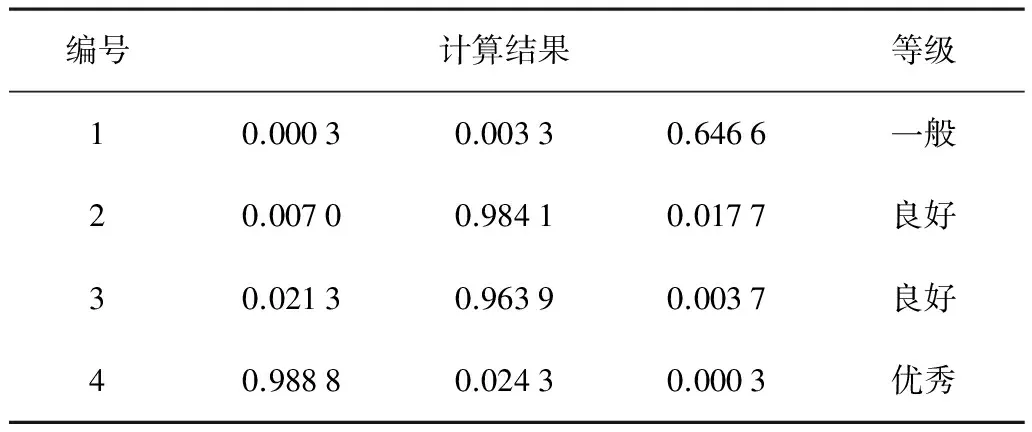
表2 评价结果
3 信息管理系统
组培苗机器人管理系统框图,如图4所示。
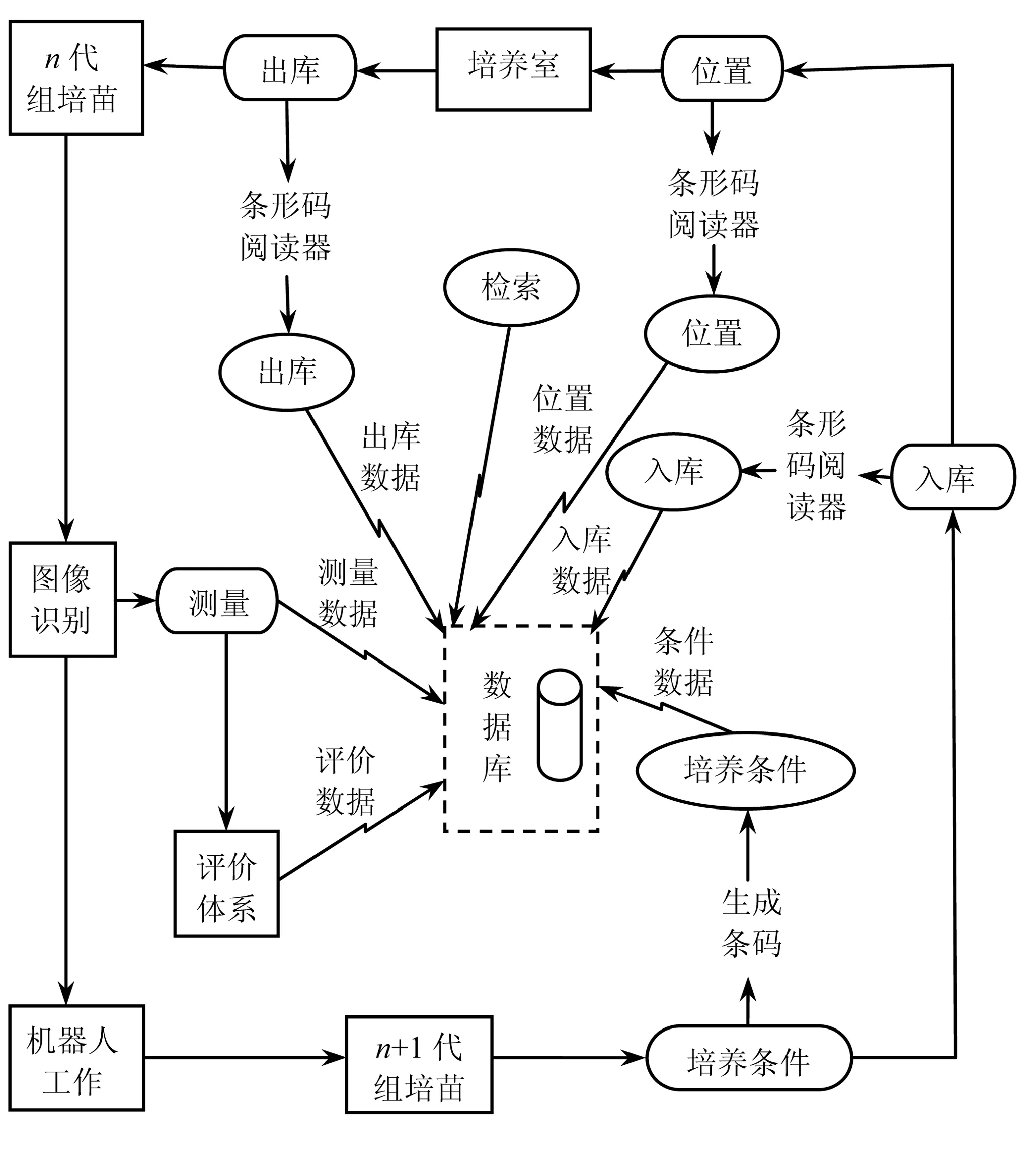
图4 组培苗机器人管理系统框图
信息系统的使用过程为:
1)从组培室中取出第n代组培苗,扫描员工信息卡,扫描组培苗条码,输入数量,打印条码贴在培养容器上;处理完成后将第n代组培苗转移至接种机器人处准备切割。
2)扫描员工信息卡,扫描组培苗条码,对组培苗进行图像识别,此阶段测得的组培苗生长状态(如茎秆直径、株高、生长点个数等)自动录入系统中。
3)评价体系读取测得的信息,计算后得到的结果自动录入系统中。
4)机器人工作,按照单个生长点原则切分第n代组培苗。转移第n+1代组培苗时,扫描员工信息卡,输入对组培苗进行培养的培养条件、来源等信息,生成新条码。处理完成后打印条形码符号标签,粘贴在培养容器上。
5)转移第n+1代组培苗至培养室,将其放在培养架上,扫描员工信息卡,扫描组培苗条码,输入数量,输入在组培室中的位置,生成条码。处理完成后打印条形码符号标签,贴在培养容器上。
4 结论
系统采用条形码技术对信息进行记录、储存与传递,结合条形码阅读器使数据信息的输入、读出变得更加快捷,准确。条形码技术的应用有效的降低了劳动力[12],且将系统的每个生产阶段衔接起来,简化整个生产过程的管理环节。
为了更好地培育出适合机械作业的组培苗,本系统利用BP神经网络的方法设计了评价体系。通过大量组培苗数据对BP网络进行训练,以组培苗测量的生长状态数据(如茎秆直径、株高、生长点个数等)为输入值,以组培苗机械作业优劣性为目标输出值,最终使得该BP神经网络可评价组培苗机械作业性能[13]。
系统设有追溯体系,条码信息中包含组培苗来源,点击后便可查看上一代组培苗的所有信息,如培养条件、生长状态、机械作业性能优劣性、来源等。通过追溯体系和评价体系可以使工作人员了解如何培养出健壮的及适合机械作业的组培苗。
[1] 王晓芳.植物克隆—组培苗[J].落叶果树,2015,47(2):16.
[2] 杨丽.组培苗分割移植机器人系统的研究[D].北京:中国农业大学,2005:1-8.
[3] K.Kurata,T.Kozai. Transplanter Production Systems. Kluwer Academic, 1992:283-296.
[4] 屈哲,来杭生.整瓶马铃薯组培苗剪切机构设计[J].农业机械学报,2015,46(9):39-46.
[5] 梁欣婷,钮旭东.组培室环境控制与追溯管理系统的设计与开发[J].工业控制计算机,2012,25(4):61-65.
[6] 商龙,阮俊瑾.组培室生产管理与环境控制系统的设计与实现[J]. 工业控制计算机,2014,27(1):7-12.
[7] 陈瑶,陈光彩.基于条形码的可追溯植物组培苗生产管理系统开发[J].东南园艺,2015(1):42-47.
[8] 周品.MATLAB神经网络设计与应用[M].北京:清华大学出版社,2013:153.
[9] 魏海坤.神经网络结构设计的理论与方法[M].北京:国防工业出版社,2005:1-398.
[10] 陈涛,高必梵.基于BP神经网络的农作物虫害预测系统的研究[J].应用研究,2015(1):91-93.
[11] 李聪颖,王肇飞.基于 BP神经网络的高速公路交通安全评价系统设计与实现[J]. 武汉理工大学学报:交通科学与工程版,2010,34(3):476-479.
[12] 王咪咪,张海燕.医院药库药品条形码应用系统工作模式的建立及优化[J].中国药房,2013(21):1972-1974.
[13] 孙燕.基于遗传算法和神经网络的菊花组培苗生长建模[D].淄博:山东理工大学,2010:1-51.
Research and Implementation of the Information Management System of the Potato Tissue Culture Seedling Inoculation Robot Based on Web
Shao Dong1,Cheng Dapeng1,Gu Song2,Lu Qiangqiang1,Li Yuanqiang1
(1.College of Engineering,Northeast Agricultural University,Harbin 150030,China;2.College of Engineering,South China Agricultural University,Guangzhou 510642,China)
In the course of the plantlets inoculating robots automatically, it needs an information management system,whose features include the information on employees and customers, the tissue culture conditions, the measured data,sources and the management of the tissue culture chamber.This paper utilizes PHP and AJAX technology to create dynamic Web pages and establish an information management system with designing the database, it is released in the form of Web and utilizes the bar code technology to record,store and transfer the data.This paper establishes five functional modules based on robotic production system, which can achieve some functions, such as recording plantlets culture conditions, measuring the data,evaluating the merits of plantlets mechanical operations, and managing the plantlets retroactively. The system can solve the complicated data recording problem during the process of the robot production and improve record accuracy effectively, which can provide the help for the tissue culture production factory.
tissue culture; robot; information management; bar code technology; retroact; potato
2016-04-11
国家“863”计划项目(2013AA102440603)
邵 东(1989-),男,辽宁盘锦人,硕士研究生,(E-mail) shao_dmhwl@163.com。
李元强(1969-),男,哈尔滨人,副教授,硕士生导师,(E-mail)lyts@neau.edu.cn。
S223.1;TP242
A
1003-188X(2017)01-0101-05
