基于边界扫描的雷达嵌入式测试和诊断技术
2017-12-15,
,
(南京电子技术研究所,南京 210039)
基于边界扫描的雷达嵌入式测试和诊断技术
毕伟镇,杜舒明
(南京电子技术研究所,南京210039)
为解决因雷达数字化、高速化发展引起的测试和诊断技术难题,提出了基于边界扫描的雷达嵌入式测试和诊断方案,介绍了系统的硬件架构和软件设计;该方法可以在雷达系统正常执行任务期间,实时检测数字集成电路的故障,并将故障定位到芯片引脚;对低速数字信号,可以采集完整的信号波形;对较高速度的数字信号,可以通过多次采集和统计分析的方法提取故障特征;该方法已通过试验验证。
雷达;机内测试;边界扫描;嵌入式测试
0 引言
随着雷达数字化、高度集成化、高速化发展,使得测试点设置越来越难。目前,雷达中数字电路机内测试(BIT)主要测试手段包括:在维护BIT下,利用测试码元检测电路故障;在周期BIT下,采集CPU状态、内存状态、模块温度等信息,通过状态分析检测故障。这些检测方法故障检测率低,不能满足雷达故障检测和隔离的需求。
近年来,国内外对边界扫描测试技术应用于数字电路板的测试进行了大量研究。应用边界扫描测试技术对数字电路板进行板级测试,能够解决短路、开路、固定电平等故障的诊断问题[1]。电子科技大学设计了基于高速数字 I/O 的边界扫描控制器,能够有效的解决带 FPGA、CPLD 等可编程逻辑器件的数字电路板故障诊断难题[2]。
国外的研究机构已经把边界扫描测试技术应用于系统的在线测试。针对在军事系统中开发测试和诊断所需信息不足的问题,提出了将边界扫描作为系统级测试诊断工具,对简单通用的系统进行论证,证实了边界扫描的存在能够提高系统的故障隔离率[3]。利用一种基于边界扫描测试的嵌入式新技术,可以提高飞机航电系统的故障检测率,减少故障隔离模糊。在飞机正常飞行期间,也能检测数字电路的信号状态[4]。
本文针对数字阵列雷达测试和诊断需求,研究边界扫描测试技术在雷达系统上的应用。介绍了基于边界扫描的雷达嵌入测试和诊断方案的硬件架构以及软件设计,并结合低速以及高速数字信号对在线采集方法进行试验验证。
1 系统架构及工作原理
1.1 系统架构
测试系统硬件架构由嵌入在雷达分系统(天线、数据处理、频率源、数字信号处理等)的边界扫测试单元(BSTU)、CAN-LAN转换单元、网络交换机、中央BIT组成。对于天线分系统,每个T/R组件使用独立的BSTU并提供CAN接口。对于数字信号处理、数据处理等分系统,BSTU工作于VPX总线的插箱中,并提供多路JTAG接口用于测试和诊断。测试系统硬件架构见图1。
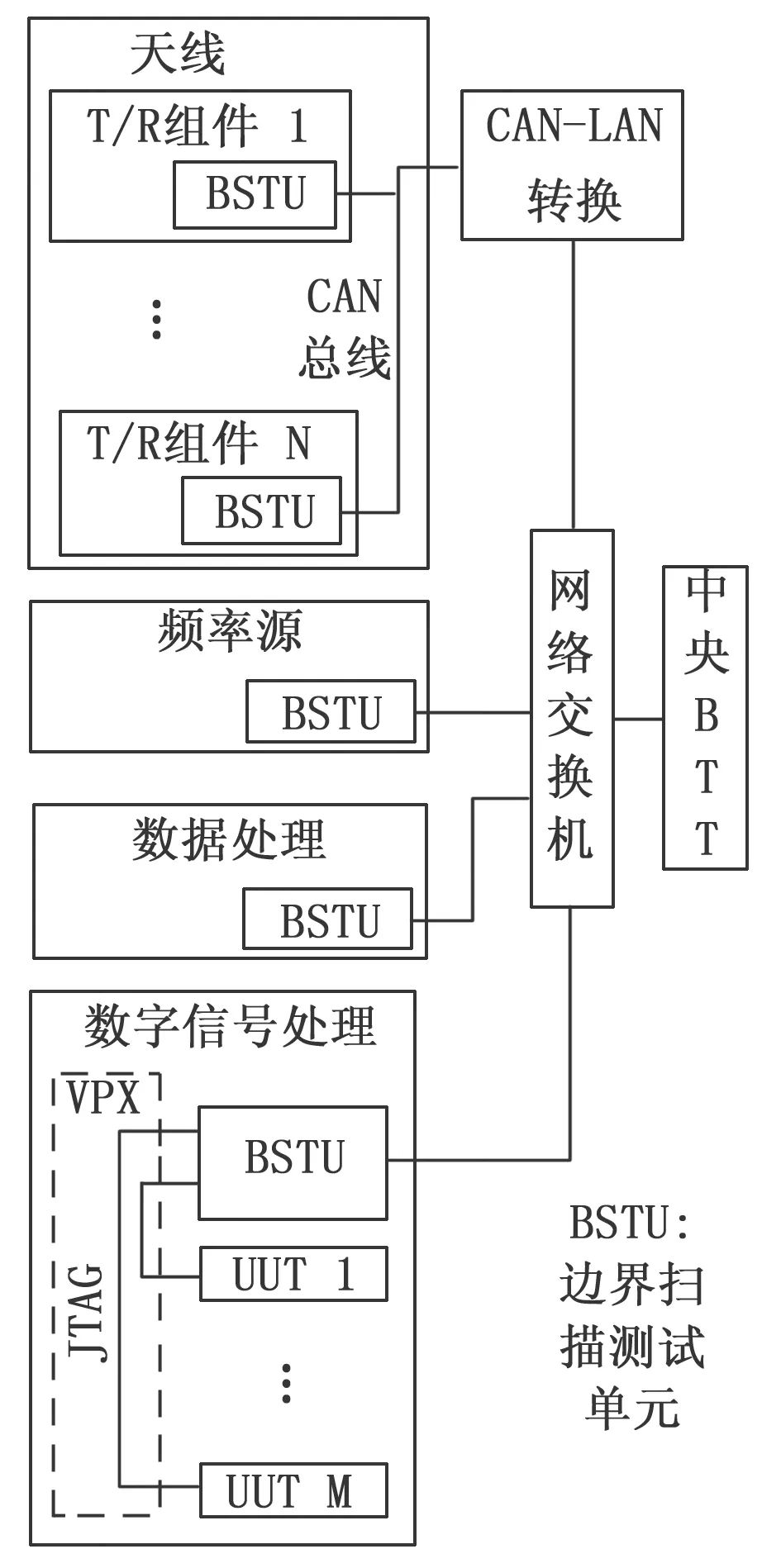
图1 测试系统硬件架构
1.2 功能需求
将BSTU应用于雷达系统测试中,能够对天线、频率源、数字信号处理、数据处理等分系统进行测试和诊断。能够完成以下测试和诊断功能:
1)在被测电路模块不脱离雷达系统的条件下,雷达维护人员通过监控终端可以选择雷达中任何数字电路模块实施边界扫描测试,可检测模块内部的开路故障和短路故障以及模块之间的互连故障等,测试结果可以上报。
2)对于低速数字信号,在雷达工作(执行任务)期间,利用边界扫描测试实时在线采集数字信号,采集结果可上报至中央BIT。
3)对于高速数字信号,在雷达执行任务期间,利用边界扫描测试实时在线采集,通过对多次采样结果进行统计分析,获取故障特征,诊断结果可上报至中央BIT。
1.3 工作原理
将BSTU应用于雷达测试系统中,能够在雷达任务状态下以及非任务状态下进行测试和诊断,因此BSTU工作于以下两种测试模式:
1)非任务状态下:雷达维护人员可以选择对天线、频率源、数据处理、数字信号处理等分系统进行测试,测试内容包括链路完整性、互连测试、器件功能测试等基本测试。通过链路完整性测试能够确认边界扫描链的完整性,链路测试包括执行BYPASS、IDCODE、USERCODE等操作。通过互连测试能够诊断集成电路板间/板内器件之间的连接情况,其基本测试方法是在BSTU的控制下,向互连网络的输入端的边界扫描单元加载测试矢量并同时向输出端执行外测试(EXTEST)指令,然后在互连网络的另一端的边界扫描单元捕获测试响应值,根据分析输入以及输出结果能够判断器件是否存在开路、短路和呆滞(0/1)等故障。器件功能测试主要用于测试一些复杂功能的器件,如触发器、计数器、FIFO等,根据测试对象不同可分为边界扫描器件的功能测试和非边界扫描器件的簇测试。
2)任务状态下:在雷达系统正常执行任务期间,BSTU能够实时在线获取集成电路引脚状态,将获取的集成电路引脚状态与预期结果进行比对,能够判定雷达是否工作在正常状态。雷达维护人员能够选择对天线、频率源、数据处理、数字信号处理等分系统某一模块进行在线采集数据或者周期对雷达系统所有模块进行在线采集数据,根据测试需求的不同选择不同的在线采集方式。针对集成电路引脚高速以及低速信号分别采取不同的诊断方式,当在线测试采样率远大于信号变化速率(5倍)时,在线采集能够完全捕获集成电路引脚逻辑变化状态,通过与预期期望逻辑状态进行比对能够诊断其工作状态,当在线测试采样率低于信号变化率时,在线采集无法对其完全采样,此时通过多次采集结合统计分析的方式,判断集成电路引脚是否出现短路、开路等故障,最终将诊断结果通过LAN接口上传至中央BIT。在线采集数据主要依据边界扫描测试中的SAMPLE指令,其能够在不影响器件正常工作的前提下,对器件输入输出管脚进行“拍照”,同时在TCK下降沿将“拍照”信息通过移位指令从TDO移出。在线采样率与测试时钟速率以及链路上边界单元数量有关。
2 BSTU硬件设计
2.1 组成
BSTU应用于VPX插箱中,在雷达系统在线测试和诊断中,既能完成非任务状态下的链路测试、互连测试、功能测试,用于测试模块内以及模块间是否出现开路、短路等故障;又能够完成在任务状态下的雷达状态诊断,通过获取数字集成电路引脚状态来实时监视其工作状态。
基于以上需求,BSTU主要由CPU处理器、FPGA、DDR动态存储器、固态存储器、电平转换、2换1开关、LAN通信接口组成。BSTU硬件框图见图2所示,其中:

图2 BSTU硬件框图
1)CPU处理器用于控制BSTU测试逻辑,能够针对雷达系统工作状态选择进行相关的测试模式;
2)FPGA在CPU处理器的逻辑控制下生成测试需要的时序信号,包括TCK、TMS、TDI以及采集TDO测试响应数据;
3)电平转换用于匹配不同UUT需要的测试电平;
4)DDR动态随机存储器,具有实时读写数据的能力,能够在一个TCK周期完成两次读写工作,可以完成测试时序的写以及响应数据的读取工作;
5)2选1开关用于选择JTAG接口通过VPX总线还是前面板的连接方式,用于匹配目前UUT中不同的JTAG接口引出方式。
6)接口提供两组各12路JTAG接口以及通信LAN接口。JTAG接口用于加载测试时序以及采集测试响应数据。LAN接口用于和上位机进行通信。
2.2 关键技术实现
在进行基于边界扫描的在线测试和诊断时,低采样率对于相对高速变化信号难以将其状态全部采集并再现,造成在线测试和诊断在应用中的局限性。采样率的提高主要受限于两方面:一是边界扫描链路过长,边界扫描在将测试响应数据移出时采用的是串行的方式,边界扫描单元数决定着在线测试对被测信号的采样率。目前大部分芯片本身具有数千个边界扫描单元,如果边界扫描控制器提供的JTAG接口少,使得链路需要使用“菊花链”的串联方式,将大大增加链路上边界扫描单元数;二是测试时钟限制,目前在使用边界扫描测试控制器进行测试时,需要通过数米的电缆进行连接,对测试时钟TCK信号产生很大的干扰,使得很难提高测试时钟。
为了最大限度的提高对被测信号的采样率,每个BSTU提供多路JTAG接口,能够对多个UUT同时测试,对链路不使用串联的方式,减少链路上边界扫描单元数。采用嵌入式BSTU进行测试和诊断,能够使BSTU尽量靠近UUT,减少因电缆长度造成的测试时钟限制,进而提高对被测信号的采样率。
3 BSTU软件设计
3.1 软件组成
运行于BSTU的软件能够完成两部分主要功能:一是在雷达系统非任务状态下对选择的数字电路模块进行互连测试,可检测模块内部的开路故障和短路故障以及模块之间的互连故障等,测试结果可以上报至中央BIT。二是在雷达系统执行任务期间,能够采集集成电路数字信号,对于低速数字信号,利用边界扫描测试实时在线采集数字信号,采集结果可上报至中央BIT;对于高速数字信号,利用边界扫描测试实时在线采集,通过对多次采样结果进行统计分析,获取故障特征,诊断结果可上报至中央BIT。软件组成框图见图3。

图3 软件组成框图
1)测试模式设置:雷达维护人员可以根据实际需要选择需要进行的测试模式,能够完成包括任务状态和非任务状态下的测试;
2)测试参数设置:根据不同的测试模式,可以选择不同的测试参数,主要用于满足UUT测试需要进行的测试时钟、电平、测试矢量等参数;
3)测试信号生成:根据不同的测试模式以及测试参数信息,生成符合测试目标要求以及IEEE1149.1标准的JTAG时序信号;
4)响应数据采集:结合测试时序以及边界扫描描述文件提供的对应关系,采集并提取TDO测试响应有效数据;
5)数据管理:用于存储本地化测试矢量、测试响应有效数据、故障诊断结果等信息;
6)故障诊断:对在线采集数据结合诊断算法进行故障隔离,诊断UUT是否工作在正常状态以及定位故障单元。根据不同的测试模块选择合适的诊断方式,对于低速数据信号,实时在线采集并与预期期望逻辑变化关系进行比较分析;对于高速数据信号,重复多次采集数据结合统计分析的方式进行诊断。
3.2 软件流程
软件在上电后自启动,首先加载测试矢量数据。测试矢量是根据网表文件、边界扫描描述文件、测试算法等生成的测试数据,用于进行非任务状态下的板间、板内互连测试。将测试矢量数据本地化,上电自动加载能够节约测试时数据读取时间。根据雷达维护人员选择雷达任务状态下或者非任务状态下的测试模块,自动生成满足测试需求以及IEEE1149.1标准的JTAG测试时序信号,包括TCK、TMS、TDI,测试参数还包括测试时钟频率、测试电平等。将测试信号加载至被测单元(UUT),同时采集TDO测试响应数据。根据不同的测试模式以及集成电路引脚信号数据变化率,能够采取不同的诊断测试方式,最终将测试诊断结果通过LAN上传至中央BIT。软件流程见图4。
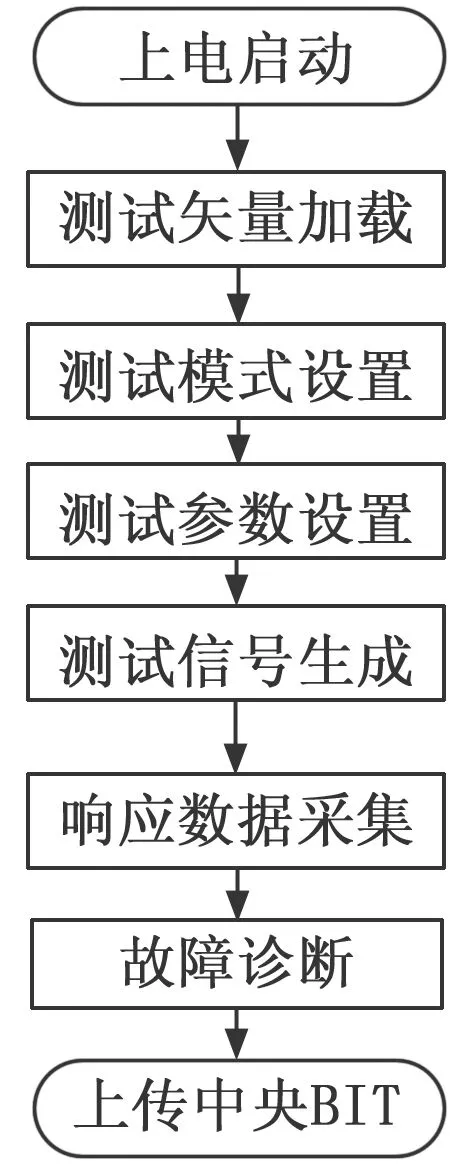
图4 软件流程图
3.3 关键技术实现
BSTU提供多路JTAG接口,因此在进行测试和诊断时需要软件支撑,控制测试和诊断流程。在雷达非任务状态下测试时软件需要上电自动加载本地化测试矢量用于支持板内、板间互连测试。在雷达执行任务的情况下进行测试时,软件能够对采集结果进行诊断获取故障信息。其难点包括:多路JTAG接口协同测试逻辑控制、测试矢量产生、故障诊断算法。
在进行多路JTAG接口协同测试时,需要对每路测试状态进行控制,根据当前所处状态以及测试需求状态确定进行的操作,测试能够维持的状态有限,如测试矢量载入、测试指令加载、测试响应采集等,因此引入状态机来控制测试逻辑。测试矢量产生需要解析网表文件、BSDL文件以及选择测试算法等。故障诊断算法是对采集结果进行诊断采取的处理方式,对低速信号通过与预期结果进行比对诊断UUT工作状态,对高速信号多次采集结果进行统计分析,提取故障特征。
4 试验验证
4.1 验证方法
为了验证在线采集数据的有效性,在UUT正常工作期间,执行SAMPLE指令,在线采集数字集成电路引脚状态变化。对UUT进行编程,使其引脚处于高速以及低速信号变化状态,通过分析在线采集数据与预期期望数据的比对结果,验证高速以及低速信号变化状态下在线采集数据的有效性。
4.2 验证系统组成
验证系统包括计算机、BSTU、PXI插箱、数字I/O模块、适配器、UUT。验证系统组成见图5。
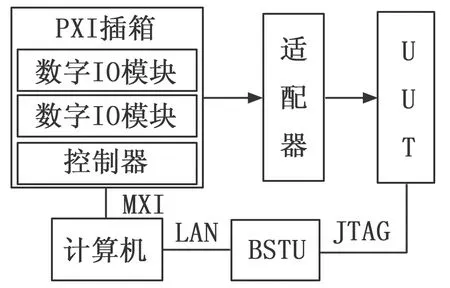
图5 验证系统组成
计算机主要完成测试时序的生成、加载以及采集分析,BSTU生成TCK、TMS、TDI测试时序以及采集TDO响应数据。PXI中数字信号模块用于生成UUT的输入信号。UUT包含Xilinx公司的芯片XC2C256,分析其边界扫描描述文件(BSDL)可获得:芯片共有552个边界扫描单元,SAMPLE指令码为00000011。
4.3 验证步骤
1)通过计算机编辑测试时序,包括TCK、TMS、TDI,控制TAP状态依次进入:Test-Logic-Reset→Run-test/Idle→Select-DR-Scan→Select-IR-Scan→Capture-IR→Shift-IR1→...→Shift-IR8→Exit1-IR→Update-IR→Select-DR-Scan→Capture-DR→Shift-DR0→...→Shift-DR551→Exit1-DR→Update-DR→Select-DR-Scan→Capture-DR→Shift-DR0→...→Shift-DR551......。通过重复Capture-DR以及Shift-DR的方式,进行多次在线捕获采集,获取集成电路引脚多个状态值进行分析。
2)编程UUT使其引脚处于低速信号变化状态,将时序信号通过JTAG接口加载至UUT并采集TDO测试响应数据。
3)将采集的响应数据结合边界扫描描述文件进行数据分析,提取测试有效数据并与预期期望结果进行比对,验证采集数据的有效性。
4)编程UUT使其引脚处于高速信号变化状态,将时序信号通过JTAG接口加载至UUT并采集TDO测试响应数据。
5)将采集的响应数据结合边界扫描描述文件进行数据分析,提取测试有效数据并结合统计分析的方式,验证采集数据的有效性。
4.4 结果分析
4.4.1 低速数字信号在线采集和诊断
设置JTAG接口TCK频率为556 KHz,每采集一次,移位需要556(552个BC单元数+4个TAP中间状态值)个TCK时钟,因此其采样率为:
556 KHz/556 = 1 KHz
对变化频率为125Hz的输入信号对应的IO引脚进行采集,分析采集结果,输入波形及采集过程如图6所示:
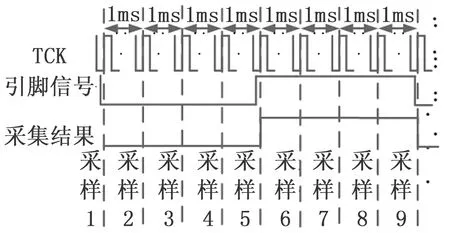
图6 低速信号采样示意图
信号的频率为125Hz,采样频率为1KHz,因此预期采集结果为:000011110…,信号实际采集结果为:000011110…,与预期结果吻合,被测试引脚无故障。
4.4.2 高速数字信号在线采集和诊断
当数字信号处于高速变化时,在线采集无法完整采集信号状态,此时通过对多次采集结果进行统计分析,提取故障特征。对高速变化信号对应的IO引脚进行采集,输入波形及采集过程如图7所示:
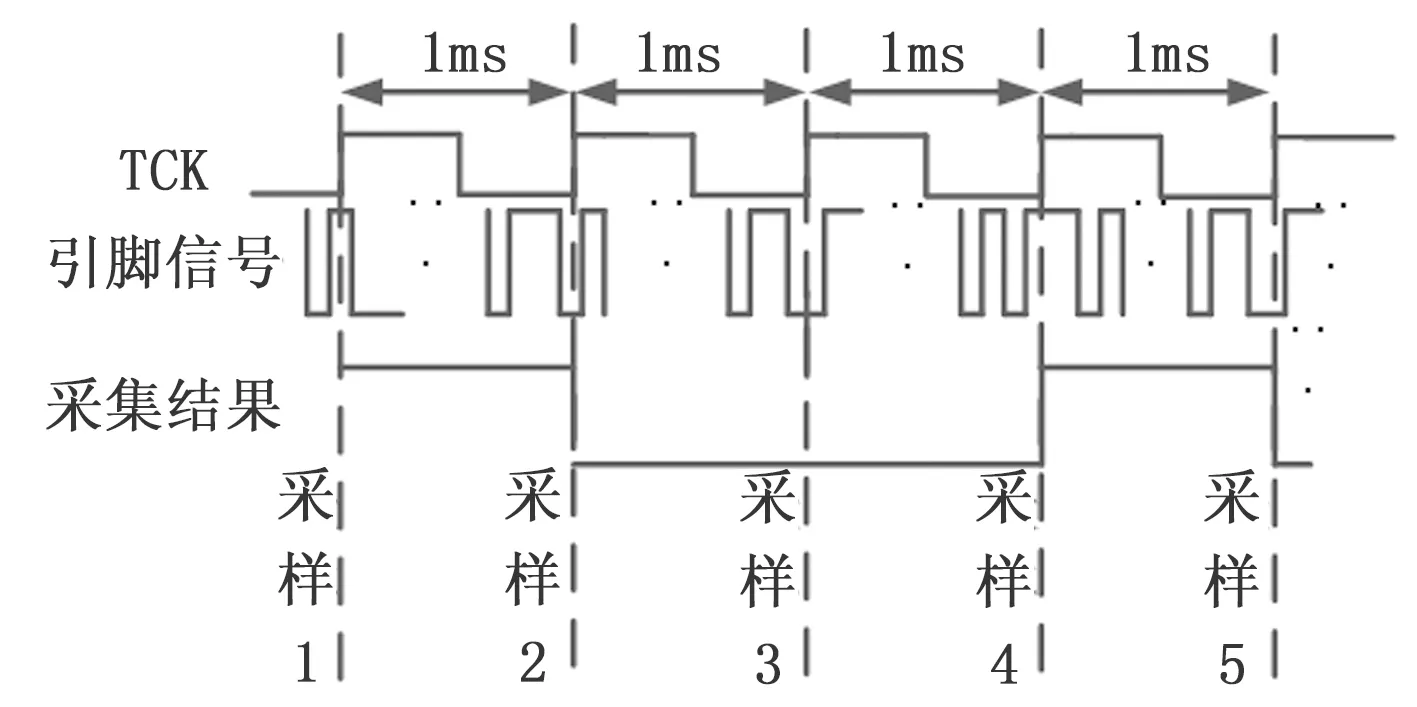
图7 高速信号采样示意图
对引脚预期采集结果应有0、1的变化。实际采集结果为:10001…,采集数据有0、1的变化,被测试引脚未发生固定电平故障。
5 结束语
本文提出了基于边界扫描的雷达嵌入式测试和诊断方案,能够在雷达执行任务/非任务状态下进行测试和诊断,对方案从系统硬件架构和软件设计两方面进行了介绍。对在线测试进行试验验证,结果表明:对低速数字信号,可以采集完整的信号波形,通过将采集结果与预期结果进行比对,诊断芯片引脚工作状态;对较高速度的数字信号,可以通过多次采集和统计分析的方法提取故障特征。
[1] 曹子剑,佘美玲. 边界扫描测试在数字电路自动测试系统中的研究与应用[J]. 计算机测量与控制,2015(7):2311-2313.
[2] 杨俊泰. 基于边界扫描技术的雷达电路板故障自动诊断的研究与实现[D].成都:电子科技大学,2010.
[3] Ungar L Y. Boundary scan as a system-level diagnostic tool[J]. in IEEE Instrumentation & Measurement Magazine, 2013,16(4):8-15.
[4] Ungar L Y,Sudolsky M D. Tapping Into Boundary Scan Resources for Vehicle Health Management[Z]. Proc.of Autotestcon, 2016.
RadarEmbeddedTestandDiagnosisTechnologyBasedonBoundaryScan
Bi Weizhen, Du Shuming
(Nanjing Institute of Electronics Technology, Nanjing 210039, China)
In order to solve the problems of test and diagnosis technology caused by the digitization and high-speed development of radar, radar embedded test and diagnosis scheme based on boundary scan is proposed, the hardware architecture and software design are introduced. The method can detect the faults of the digital integrated circuit in time during the normal operation of the radar system and locate the fault on the chip pins. For low speed signals, complete waveform can be acquired; for higher speed digital signals, fault signature can be extracted by means of multiple acquisition and statistical analysis. The method has been verified by experiments.
radar; built-in test; boundary scan; embedded test
2017-06-29;
2017-08-29。
毕伟镇(1991-),男,河南商丘人,硕士研究生,主要从事基于边界扫描的雷达测试和诊断技术方向的研究。
1671-4598(2017)11-0043-04
10.16526/j.cnki.11-4762/tp.2017.11.011
TP273
A
