基于ADAMS 的有轨起重机参数化建模及仿真分析
2017-12-14江华乔榛孙友刚吴烨毅韩灿董达善
江华*,乔榛,孙友刚,吴烨毅,韩灿,董达善
(1.上海振华重工(集团)股份有限公司,上海,200125;2.上海海事大学,上海,201306)
基于ADAMS 的有轨起重机参数化建模及仿真分析
江华1*,乔榛2,孙友刚2,吴烨毅1,韩灿2,董达善2
(1.上海振华重工(集团)股份有限公司,上海,200125;2.上海海事大学,上海,201306)
针对有轨起重机的工作特点和结构尺寸,基于二次开发的技术在 ADAMS中建立起重机大车结构的参数化模型,只需在设计界面输入尺寸就可以快速建立模型。本文提出的建模方法在使用时无需更改变动约束副,而且达到快速建模的目的。在 ADAMS中创建一种计算轨道和车轮在转弯过程中偏移量的方法,主要采用简化模型、 ADAMS点线约束和移动副保证在转弯过程中车轮和轨道始终相垂直。这种方法不但可以求出仿真过程中偏移量的大小,用来验证有轨起重机是否在轨道上出现啃轨,而且对其他机械系统的二次开发和轨迹修正提供有益参考。
有轨起重机;参数化建模;偏移量;通过性验证
引言
有轨起重机在工作时,需要从直线轨道运行到与之成某一角度的另一直线轨道。当起重机的一侧车轮沿着转弯轨道行走时,另一侧的车轮相对轨道有一定的偏差量,当偏移量逐渐增大,最终出现车轮卡轨。针对车轮卡轨,顾树泽[1]采用在直线轨道和圆弧轨道之间加入一段直线,作为过渡段。倪庆兴[2]等人推导出曲线轨道的最小曲率半径和在圆弧轨道上轨道的修正方法。夏选青[3]进一步提出通过游动手轮补偿偏差量。本文提出一种采用ADAMS软件计算车轮偏移轨道的方法,用来验证轨道的通过性及对起重机转弯过程进行动态仿真。
1 转弯过程偏移量的理论计算
在进行转弯过程中,起重机内侧支座中心位于内侧轨道上,当内侧两个支座同时到达曲线轨道时,起重机完全处在转弯过程,外侧的两个支座对外侧轨道有相同大小的偏移量,这时,以内侧轨道上车轮定位时,求外侧中心偏移外侧轨道的最大尺寸。
讨论当一个支座上仅有一台可绕垂直轴线转动的台车时的情况,如图1所示。
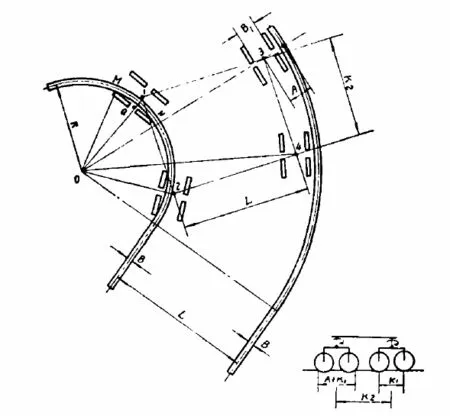
图1 转弯过程相互关系
在∆O12中,由余弦定理知:

又因为 ∠ O13=90°+∠O12
在∆O13中,由余弦定理:

所有可以求解起重机外侧支座中心偏移外轨纵向轴线的最大尺寸:

其中 式中S是起重机的轨距,O1、cos∠O13由公式(1)和(2)求得。
针对四个支座由若干台两轮平衡台车对称布置组成,所有的平衡台车、平衡梁均可绕垂直轴线自由转动去的情况,车轮偏移轨道的计算公式为

式中:

R是指内侧轨道纯圆半径,S是起重机轨距尺寸、B是轨道顶面宽度,B1是车轮踏面宽度,A是车轮与轨道的有效接触长度,如下图2所示。Kn是平衡梁的尺寸,n代表几级平衡梁。
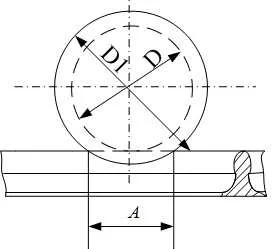
图2 车轮与轨道的有效接触长度
2 软件仿真求解偏移量的思路:
在ADAMS中建立有轨起重机的和轨道的虚拟样机模型[4.5],让起重机内侧车轮严格约束到修正好的内侧轨道,外侧车轮和修正后的外侧轨道采用轴套力约束,保证车轮自适应外侧轨道,通过编写函数计算外轨的轮轨偏差量,通过对比外侧的偏差量和轮轨预留的间隙,判断是否能通过。
2.1 有轨起重机结构简化
根据ADAMS建模和仿真需要,对车轮进行适当简化,内侧车轮简化为具有一定半径的车轮球,车轮球的圆心为车轮的中心。根据车轮踏面和轨道顶面特点,把外侧车轮简化成有效矩形框的形式,外侧车轮的简化流程,如图3所示。其中,车轮在轨道上的有效投影重复长度为A,轮缘和轨道边缘的间隙称为剩余轮轨间隙,用参数U表示。

图3 轨道简化流程
根据车轮踏面和轨道踏面尺寸,简化的矩形框宽度为2倍的车轮踏面减去轨道踏面的差,由于把内侧间隙值转移到外侧车轮上,矩形长度为2倍的车轮轮缘半径与车轮踏面半径平方差的开平方。

其中,D是指车轮踏面直径,D1是指车轮轮缘外径直径,B1是指车轮踏面宽度,B是指轨道顶面宽度,∆U是内外轨吃掉的间隙。
仿真时,把车轮球心约束到内侧轨道,有效矩形车轮约束到外侧轨道。只研究车轮和轨道之间的关系,把起重机下面部分对仿真没有影响,直接简化成框架形式,如图4所示。

图4 起重机简化后的框架
岸边集装箱起重机是定制化设计,起重机设计尺寸根据用户需要而定。为了方便使用,在ADAMS采用参数化建模[6],这样不必每次重新建立模型,只需在设定好的界面输入尺寸,模型可以自动修改尺寸。参数化的模型使用户方便修改模型而不用考虑模型内部之间的关联变动,模型就可以自动更新,
2.2 坐标点建立
本文中主要使用参数化点坐标和设计变量两种参数化建模方式。采用参数化点坐标和设计变量的方法构建模型,把上述简化的有轨起重机大车模型进行建模,选定图形中的中心后,把各个零件进行离散化形成作图时需要的点的坐标和设计变量,把模型简化好后,在ADAMS中建成需要的模型。以内侧轨道靠近坐标原点为参考点,建立坐标点关系[7]。,如图5和6所示,

图5 八轮相关参数

图6 设计变量

依次类推建立参数坐标点,进行相互关联,如下图7所示。

图7 参数化坐标点
采用上述方法,创建的参数化模型如下图8所示,以八轮为例。
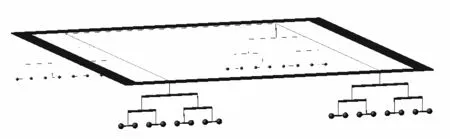
图8 简化的八轮模型
2.3 用户操作界面创建
通过二次开发和用户化设计[8],定制用户菜单,设置用户对话框。这样便于用户对模型的参数进行修改,通过定制的用户对话框输入相应的参数值,即可方便的更改设计变量的数值,实现模型自动更新。定制界面如下图9所示。
设计方法:
(1)创建对话框
(2)创建文本框和标签

图9 参数修改界面
(3)创建控制命令语句
双击 My_DB对话框的背景,在在 dialog-box builder:modifying My_DB对话框中,选择 attribute后下拉列表中的commands。
Variable set variable=DV_B real=$ field_1
Variable set variable=DV_L real=$ field_2
Variable set variable=DV_K1 real=$ field_3
Variable set variable=DV_K2 real=$ field_4
Variable set variable=DV_K3 real=$ field_5
Variable set variable=DV_n real=$ field_6
Variable set variable=DV_X1 real=$ field_7
Variable set variable=DV_Y1 real=$ field_8
Variable set variable=DV_H1 real=$ field_9
Variable set variable=DV_H2 real=$ field_10
Variable set variable=DV_H3 real=$ field_11
Variable set variable=DV_m real=$ field_12
(1)定制用户菜单
在主菜单中,选择Tool-menu-modify命令。在menu builder对话框的最后,添加如下命令
MENU1 &Mymenu
NAME=MYMENU
HELP=This is my menu
BUTTON2 &My_DB…
HELP=Open” My_DB” dialogbox
CMD=int dia disp dia= My_DB
3 轨道和车轮偏移计算方法和约束施加
3.1 轨道和车轮偏移计算方法
偏移量是指车轮边缘沿着轨道法线方向到轨道的距离。建立一个辅助车轮,每个外侧车轮对应一个辅助车轮,把辅助车轮约束到外侧轨道上,车轮和轨道采用轴套力约束。简化车轮框边缘和辅助车轮采用移动副,方向沿着车轮框的局部y坐标方向,测量辅助车轮和对应车轮之间的距离。建好约束如下图10所示。
考虑车轮向外偏或向内偏,测量距离的函数编写:

其中 x1、x2分别为不同part中marker点。

图10 ADAMS中车轮和轨道之间的约束
转角的测量:通过测量平衡梁之间、平衡梁与车架之间的转动副来测量平衡梁之间、平衡梁与车架之间的转角。
4 仿真
把已知的轨道采用坐标点的形式,以spline曲线方式导入到ADAMS模型中,生成内外侧轨道。 在下横梁与与一级平衡梁、一级平衡梁与N-1级平衡梁、N-1级平衡梁与N级平衡梁、N级平衡梁与台车之间、台车与轨道之间施加约束。具体各个零件之间的约束施加方式如表1所示。

表1 零件之间的约束类型
针对现有的轨道方式,采用spline驱动从外界导入内侧轨道坐标点的方式进行驱动。这样可以保证模型内侧车轮严格按照轨道行走。驱动加载在内侧轨道上最前面的一个车轮上。给予一定的仿真时间和步长进行仿真,验证轨道的通过性和进行结果分析。
5 结果与分析
仿真结束,进行仿真结果分析。如图11所示,以八轮为例。从偏移量图形中看出,起重机在修正后的轨道行走时,可以安全通过,不出现车轮卡轨。曲线图中出现两个凸点,分别为水平线0的两侧。偏移量曲线在0线上时,代表为正值,车轮相对轨道往内侧偏移,反向则向外侧偏移,最大偏离量为-11mm,车轮相对轨道向内侧偏移。

图11 不出现卡轨的偏移量曲线
车轮偏移量数据进行对比,如图12和13所示。可以看出,车轮3011与车轮3022、车轮3012和车轮3021的偏移量曲线几乎相同,依次类推,可以总结得出单支座下台车上两个车轮偏移量对称相同。

图12 3下面所有车轮偏移量曲线图

图13 3和4下面某密称车轮偏移量曲线图
各级转角大小对比,总结得出:内侧轨道对应位置转角大于同级外侧轨道转角,同时,上一级转角大于下一级转角。同一角支座下左右转角大小相同,方向相反。如图14和15所示。

图14 内外侧轨道密应同一级平衡梁之间转角密比

图15 模型中所有平衡梁之间转角密比
6 结束语
利用ADAMS建立起重机大车结构的参数化模型,可以根据需要快速建立和修改模型,使用户方便修改模型而不用考虑模型内部之间的关联变动,而且达到快速建模的目的。同时,在ADAMS中创建一种计算轨道和车轮在转弯过程中偏移量计算的方式,可以求出仿真过程中偏移量的大小,用来验证有轨起重是否可以在轨道上是否出现卡轨。ADAMS实现有针对性地开发建立岸桥起重机大车轨道模型的专业模块,使建模方便,同时也可以利用这些模型进行动态仿真工作,极大地缩短了产品开发周期。
[1]顾树泽. 水电站门式起重机运行机构的拐弯设计[J]. 起重运输机械,1977,(06): 33-38.
[2]倪庆兴. 有轨运行式起重机的转弯问题[J]. 起重运输机械,1980,(03): 68-78.
[3]夏选青. 起重机在曲线轨道上运行的分析与计算[J]. 重工与起重技术,2015,(02): 1-3.
[4]肖建军. 基于虚拟样机的门式起重机动力学仿真研究[D]. 西南交通大学,2008.
[5]张旭. 基于虚拟样机技术的铸造起重机动力学仿真研究[D]. 北京工业大学,2016.
[6]饶剑. 基于ADAMS的悬架系统动力学仿真分析与优化设计[D]. 武汉理工大学,2005.
[7]汪惠群,郑建荣. 在 ADAMS软件中虚拟样机的参数化建模与分析[J]. 机械制造,2004,(10): 41-43.
[8]薛运锋,石明全. 基于 ADAMS的列车系统参数化建模的二次开发研究[J]. 铁道机车车辆,2006,(03): 30-33.
The Parametric Modeling and Simulation Analysis of the Crane Based on ADAMS
JIANG Hua1*,QIAO Zhen2,SUN Yougang2,WU Yeyi1,HAN Can2,DONG Dashan2
(1. Shanghai zhenhua heavy industry (group) co. LTD,Shanghai,200125,China; 2. Shanghai maritime university,Shanghai,201306,China)
According to the work characteristic and structure size of the rail crane,the parameterized model of the structure of the crane cart is established in ADAMS based on the secondary development of the technology,and the model and structure of the crane can be established just through modifying the input size in design interface. The proposed modeling method does not need to change constraints,and achieve the goal of rapid modeling. This paper create a method to calculate the offset between rail and wheel in the process of turning in ADAMS,which guaranteed that the wheel and rail is always vertical in the process of turning by using the simplified model,ADAMS point and line constraint and mobile vice joint. The method not only can calculate the size of the offset in the process of simulation and verify whether rail lifting in orbit can appear card rail phenomenon but also offer a reference for the secondary development of other mechanical systems and trajectory correction.
rail crane; parametric model; offset; pass verification
TH213
A
1672-9129(2017)06-0086-04
10.19551/j.cnki.issn1672-9129.2017.06.030
江华,乔榛,孙友刚,等. 基于ADAMS的有轨起重机参数化建模及仿真分析[J]. 数码设计,2017,6(6): 86-89.
Cite:JIANG Hua,QIAO Zhen,SUN Yougang,et al. The Parametric Modeling and Simulation Analysis of the Crane Based on ADAMS[J].Peak Data Science,2017,6(6): 86-89.
2017-02-13;
2017-03-16。
江华(1975-),男,江苏南通,上海振华重工(集团)股份有限公司智慧集团副总经理、职称:高级工程师、学历:大学本科。研究方向:港口起重机。
Email:hazel_qz@163.com
