将理想变为现实打造自动实验室的新方案
2017-12-14KerstinThurow
文/Kerstin Thurow
将理想变为现实打造自动实验室的新方案
文/Kerstin Thurow
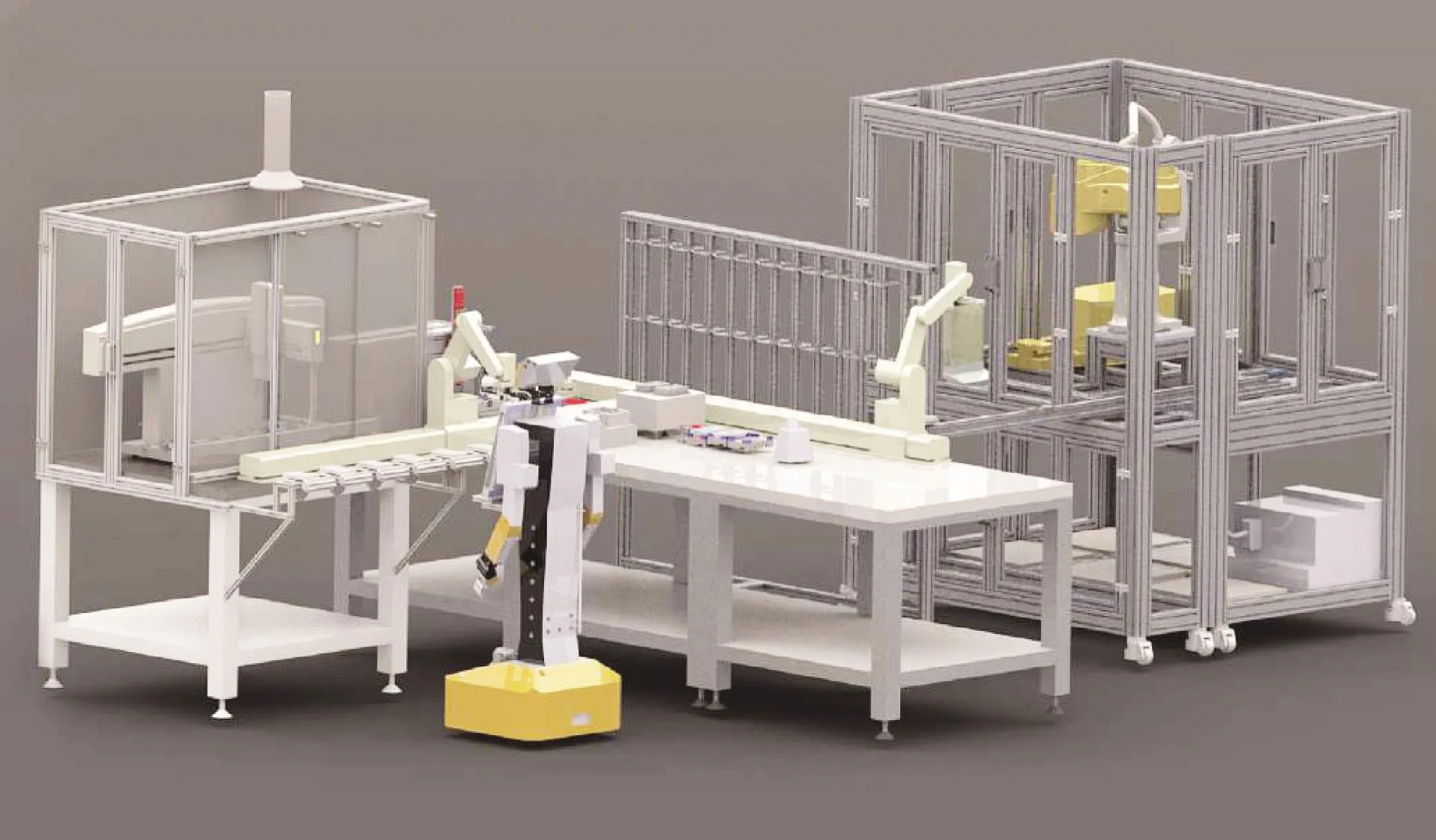
图1:未来全自动的检测分析实验室 – 可能就是这个样子。
在德国任何一个地方,典型分析实验室情况如此:一群实验员处理盛有不同液体的试管与烧杯,称量重量、滴定吸取、摇匀、过滤和分析。一切都由人工手动操作。
德国任何一家工厂之中,情况如此:从输送带左边或右边伸出一只机械手,拧螺丝、喷漆、焊接——直至将装配完好的汽车开至装配线,所有的一切趋于自动化。
差别如此之大,以至于许多工业分支均展现出较高的自动化程度,有些甚至达到全自动程度,生命科学领域之中的实验室远远甩于其后。虽然移液器和试管摇匀器等的实验室设备减轻了实验人员劳动强度,但是大多数实验室操作仍由手工完成。尤其是各个试验台之间的传递始终都由仍工操作。
分析实验室可能实现全自动化吗?可以简单移植工业自动化过程中所采用策略吗?必须开发全自动实验室新方案吗?六年前,罗斯托克大学生命科学自动化中心科学家们献身于研究这些问题并开发出未来实验室,命名为Future Lab研发项目。
工业VS生命科学
什么原因导致分析实验室较传统工业领域自动化程度低?随着分析实验室中需要检验分析的样本量逐渐变大,自动化能够显著帮助分析实验室降低成本、提高效率。仔细观察检测分析试验过程,包括:样本制备过程,不仅只需考察实验员操作流程,而且也需要观察他们所使用的实验室设备,使实验室工作过程以完全不同于传统工业自动化方式进行。分析实验室得到的任务通常能够运用不同方法完成,明显提高研发自动化检测分析系统要求。另一难题是:不同的分析实验过程需要在相互隔离开的不同空间里完成,例如,有些检测分析仪需要在恒温及纯度空气环境中进行,样本制备需在一般情况下能够在常规室内环境中进行(除非有超微量环境要求)。有些分析实验的部分过程,例如,微波消解,因劳动保护规定和要求必须穿戴好防护服。
生物样本的检测分析,必须满足其他辅助要求,如,保证空气湿度等。简单将工业自动化方案移植至分析实验室,例如,用传送带将试管、烧瓶从同一房间内的一个试验台运送至另一试验台完全不可能。另外,将自动化设备安装到现有常规实验室中同样不可能,实验室没有工业企业生产车间那么大的面积可供安装自动化设备。
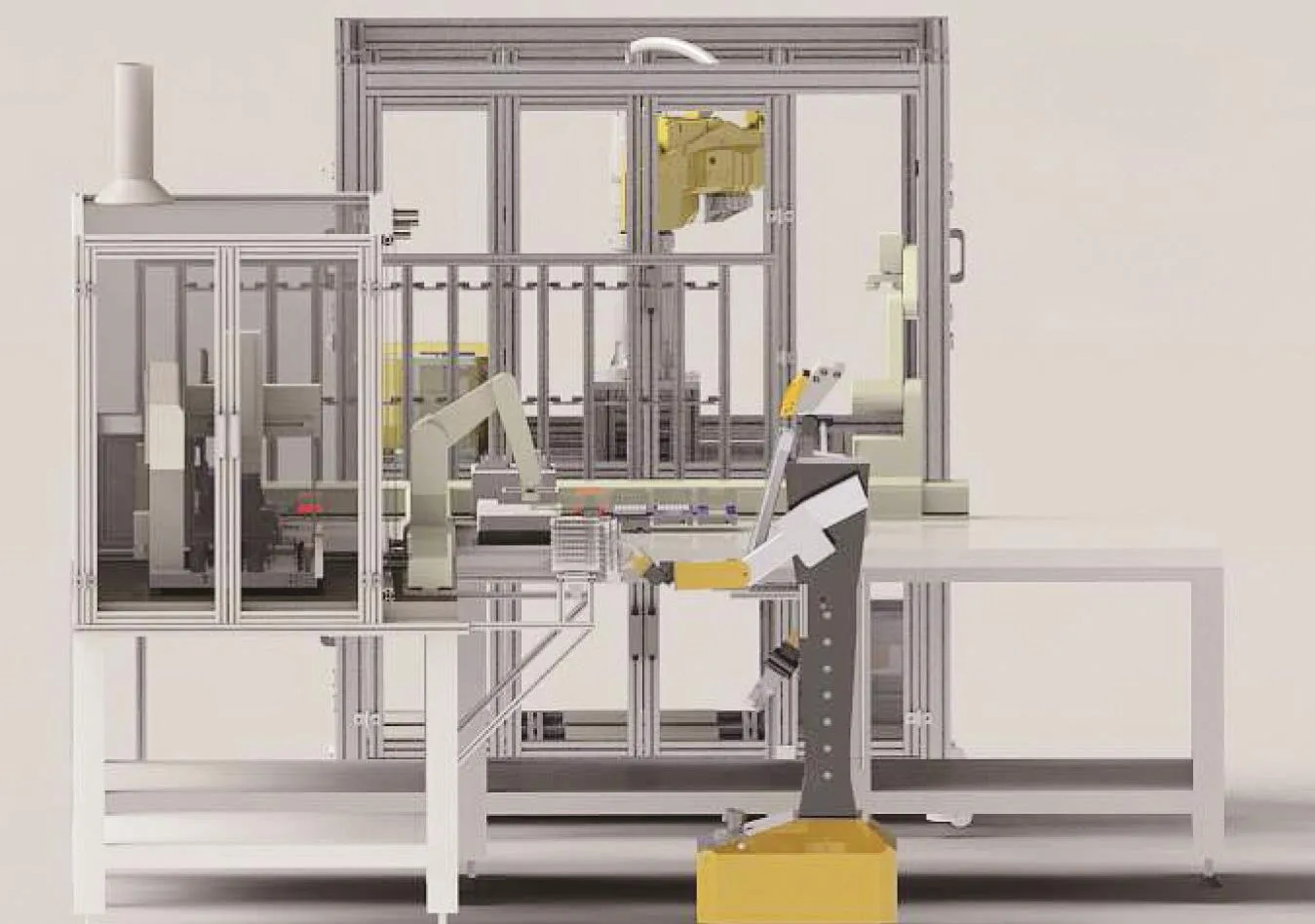
图2:在检测分析实验室中使用机器人技术遇到了许多挑战。
全自动实验室
为在分析实验室中实现很高的自动化程度,生命科学自动化中心进行了名为Future Lab的未来型实验室项目开发。这是一个分布在相互隔离空间里的试验台系统,确保分析实验的每个步骤具备最佳的实验条件并保证在现有空间里能够实现自动化。在样本制备时采用基于机器人技术系统,能够完成不同器皿中不同样本的制备工作(稀释、衍生化、称重等)。为了能够在样本制备时尽可能利用生物自动化领域技术,制备优质样本并按照微量滴定板方式运送。
在样本制备、微波消解、分析检验及必要的生物测试过程之间运送样本采用的是移动式机器人。移动式机器人从上级工作流管理系统中获得运送任务指令,工作流管理系统负责实验室全部过程管理。
本刊提示:Future Lab实验室自动化解决方案
Future Lab方案为分布于相互隔离空间里的实验台系统。在样本制备过程中利用机器人系统,由移动式机器人将放置在微量滴定板中制备好的样本运送至下一分析实验台处。
运送途中的移动式机器人
分析实验室中,运用移动式机器同样面临挑战。一方面,所有的机器人应能独立确定位置、寻找到属于自己的运动途径,需要使用不同的技术。其中,最复杂的技术便是基于摄像技术的环境识别。
一种简单的替代方案为将颜色标记或基于感应技术的运动路线设置于地面之上。机器人能够根据规定的路线运动,一旦实验室环境发生变化,这些色标、感应路线便不能再次运用,必须重新设置色标、编写感应程序。使用海军、空军中的地面标志是一种将高灵活性及低成本扩展性结合到一起最佳办法,地面标志为安装于天花板上的“上方标志”。该种标志运用反射红外线材料制作,结合编码技术可指示大量路标,与上方标志配套使用的是所谓的“占星系统”,“眼睛”设置于“额头”之上,观察上方标志系统,从而确定机器人在实验室内位置。为减少外部光线的影响、避免上方标志探测出错,占星系统镜头采用卡尔曼滤波器。所有上方标志标注编码位置均应保存于机器人室内地图之中,使机器人能够根据设定的起点与终点计算行走路线并通过理论位置及当前实际位置比较,对补偿校正路径进行监控。
若在移动式机器人行走路线上设置像房间门一样的障碍物时,机器人的传感器首先会确定障碍物状态(开启还是关闭),然后,机器人会向门控制系统发出信号,将原来关闭的房间门打开。为了避免与房间门发生碰撞,只有当机器人传感器确认房间门已打开后才会让机器人通过。
各分析实验台在室内分布上往往包含楼层变化。在此种情况下机器人会召唤实验员打开电梯门、驶入电梯、选择合适楼层、到达目的楼层后驶出电梯。目的楼层可通过楼层号识别,也可通过合适传感器对高度进行检测(通过大气压检测)确定楼层。后一种情况,需要有内置气压波动标定系统。
从抓取到放置
为使移动式机器人能够运送样本及实验器皿,它们必须能够让移动式机器拿于手中。原则上有两种可能:固定式检测分析试验台把样本/器皿交到机器人手中,或者移动式机器人具有识别检测样本/器皿的能力,能够主动将它们拿于手中。人手非常简单的动作对于机器人来讲是一项复杂的任务。在交接位置处,机器人首先需要识别需要拿走的器皿。在最简单的情况下,需要拿走的器皿需放置于规定位置处;在比较复杂的情况下,需要依靠机器人配置的摄像系统寻找与识别需要被拿走的样本及器皿。除去识别功能,仍需要准确放置位置。准确位置包括:样本、器皿放置的坐标点及移动式机器人坐标点;在此两个坐标点搞清楚后,机器才能用人手臂抓取物体,需要对机器人手臂运动学具有非常深厚的认识,需要具备手臂运动软件编程技术技巧,拥有这些技巧才能准确落实机器人手臂抓取。机器人在目标位置处放置样本/器皿的方法与此相同。
机器人同事
移动式机器人工作环境与实验员相同,因此,除要求实验员与移动式机器人之间的互动外,仍需避免实验员与机器人之间主动或被动的相互碰撞。
当实验员靠近机器人行走路线时,要求他与移动式机器人之间进行互动。该种互动方式是基于手势的互动,也可以是类似于点头、摇头等头部运动互动。在手势互动过程中,实验员抬起右臂表示:他是机器人的主人,需要继续向机器人下达命令。不同的手臂位置、姿势可以表示“向前”、“向后”、“向左”或者“向右”的命令,机器人接收到这些命令后会重新计算行走路线,也可以利用头部运动实现同样的控制。语音控制方式同样正在开发之中,这里遇到的最大挑战就是实验室中的噪音问题。
若在机器人与实验员之间不存在互动,机器人会自动测定并绕开实验员的行走环境,最终计算出避免碰撞的最短途径以及退回去的路线。若没有足够空间绕开,机器人会退避到安全之处,实验员离开其行走路线后再继续前进。
实现实验室全自动分析梦想
利用Future Lab研发项目方案可以实现全自动分析实验室梦想,该方案与现有实验室工作情况及要求相符。该自动化项目的首要目标:利用移动式机器人解决实验室内部物品运送问题及将实验室检测分析时间扩展至每周7天、每天24小时,明显提高实验室检测分析能力,从而明显节约成本费用。
现如今,全自动检测分析实验室仍处于初级阶段。罗斯托克大学生命科学自动化中心正在研发未来型实验室方案并进行着不断尝试与摸索 。
本文作者系Rostock市,罗斯托克大学生命科学自动化中心科研人员。
