微电网故障时风力发电机组结构载荷暂态分析
2017-12-14邵一川朱江宁徐志英马连博
邵一川, 朱江宁, 徐志英, 赵 骞, 李 鑫, 马连博
(1. 沈阳大学 信息工程学院, 辽宁 沈阳 110044;2. 朝阳师范高等专科学校 数学计算机系, 辽宁 朝阳 110055;3. 沈阳工业大学 理学院, 辽宁 沈阳 110023; 4. 东北大学 软件学院 辽宁 沈阳 110000)
微电网故障时风力发电机组结构载荷暂态分析
邵一川1, 朱江宁2, 徐志英2, 赵 骞3, 李 鑫1, 马连博4
(1. 沈阳大学 信息工程学院, 辽宁 沈阳 110044;2. 朝阳师范高等专科学校 数学计算机系, 辽宁 朝阳 110055;3. 沈阳工业大学 理学院, 辽宁 沈阳 110023; 4. 东北大学 软件学院 辽宁 沈阳 110000)
针对微电网故障对风力发电机组电气和机械载荷的影响进行了研究.搭建了基于FAST和MATLAB/SIMULINK软件的联合仿真模型,对电网出现故障时风力发电机组的输出转速和关键部位的载荷进行了仿真,所提方法对研究风力机接入电网的稳定性和电网故障时对风电机组的影响具有参考价值.
微电网; 风力发电机组; 疲劳载荷; 仿真模型
风能作为一种清洁能源越来越受到人们的重视,随着技术的创新,风力发电的成本也在不断降低,如何提高风能利用率,保证风力发电机组安全可靠运行,延长风电机组使用寿命,是研究人员关注的重点.目前,在额定风速以下时采用最大功率追踪策略,风速在额定风速以上时风电机组恒功率运行,风电机组的控制方式采用变桨距控制.由于风能的最大捕获和机组疲劳载荷最小化之间存在矛盾关系,为使两者之间达到平衡,优化风电机组的控制策略显得尤为重要[1-2].
随着风电机组单机容量逐渐增大,对风电机组的控制系统提出了更高的要求,不仅要满足发电的需求,还要有效抑制电网的波动和电网故障时对风电机组的影响,保持功率的稳定输出和降低疲劳载荷,实现对机组的智能控制[3].
风力发电机组控制系统的设计和研发都需要通过计算机仿真软件来实现,当前主流的风力发电软件主要有FAST、GH Bladed、Focus等[3],其中FAST软件是美国国家风能研究中心(NWTC)提供的一款免费软件.通过FAST软件研究风力发电机的疲劳载荷、空气动力学、发电机结构和系统波动等,借助MATLAB仿真风力发电机、变流器、电力汇集系统和与发电机连接的电网.FAST软件中的电机模型非常简单,并且不能仿真电网对风电机组的影响.MATLAB是受到行业认可的电力系统规划仿真软件.利用MATLAB/SIMULINK模型可以对风机和电网进行仿真,将两者结合使用,弥补各自存在的不足.文献[4]利用FAST软件和MATLAB软件联合仿真对电网故障时风电机组的结构载荷进行了分析,但是搭建的是定速风力发电机模型,没有对现在主流的变速变桨风力机进行研究.文献[5]对桨距角控制器出现故障时风力发电机的结构载荷变化进行了研究.复杂的外界风速会对风电机组载荷和电网造成严重影响,电网故障时也会对风电机组及其组件带来危害,因此对两者相互影响研究很有必要.本文研究内容包括对公共电网侧故障对风力发电机组的影响,风力发电机控制系统故障对电网的影响.
1 变速变桨风力发电机组
随着技术的创新,现在风力发电机多数为变速变桨风力发电机,主要有双馈型风力发电机和直驱型风力发电机两种机型,双馈型风力发电机定子直接与电网连接,转子经过变流器与电网连接,双馈型风力发电机模型如图1所示.直驱型永磁风力发电机是定子经过全功率变流器直接与电网相连,中间省去了齿轮箱,直驱永磁风力发电机模型如图2所示.
1.1 双馈型风力发电机组模型
如图1所示,双馈型风力发电机组结构图中,定子与电网直接连接,转子通过变流器与电网连接,由于转子励磁方式使变频器容量只占机组额定容量的一部分,降低了整机成本.技术上可以实现有功、无功功率的灵活控制,可以对电网起到无功补偿作用[5].缺点是由于有齿轮箱,增加了机组的重量以及成本,优点是双馈型发电机比较小,便于运输.

图1 双馈型风力发电机结构图Fig.1 Double-fed wind turbine structure diagram

图2 直驱型永磁风力发电机结构图
1.2 直驱型永磁风力发电机组模型
直驱型风力发电机的结构如图2所示,输入能量是风的动能,通过机械连接转变为机械能量,再通过电气连接将机械能转变成电能.由图2知风力发电机组和电网紧密相连,在电能传输线路任意瞬间发生电压等级和电网频率的波动会对风力发电机及其组件造成影响,同样风力发电机组的扰动也会对电网带来影响.直驱风力发电机由于其在低风速段仍然能够良好地运行,是未来风机的一个趋势.
2 风电机组空气动力学模型
风力发电将风的动能转化为机械能是一个复杂的气动力问题,当自然风以速度v径向吹向风轮时,风轮吸收的风功率为:

式中:Pr为风轮吸收功率;Cp为风能利用系数;β为桨距角;λ为叶尖速比;ρ为空气密度,取值为1.29 kg·m-3;R为风轮半径;v为风速.风力机从风中吸收能量的大小由Cp值决定,根据Betz理论,风能不可能全部转化为电能,风能利用系数Cp最大值为0.593[6].Cp可以近似表示为
叶尖速比为

当外界风速小于额定风速时,采用最大功率追踪控制策略,调节风力发电机转速,保持最佳叶尖速比.叶尖速比与风能利用系数Cp关系如图3所示.

图3 风能利用系数曲线Fig.3 Rotor power coefficient curve
输入风速的类型有阵风、湍流风等,不同风速类型作用在风机风轮上会产生不同的机械载荷,减小风机疲劳载荷也是当下研究的热点问题[7].产生的疲劳载荷主要包括摆振方向的剪力和弯矩、挥舞方向的剪力和弯矩以及变桨距时与变桨距力矩平衡的叶片俯仰力矩[8].风力机载荷的来源主要包括以下几个方面.
(1) 离心力.由于风轮旋转产生作用在叶片上产生叶片的离心力.
(2) 气动力.由于外界风况的复杂性,气动载荷根据动量-叶素理论计算.
(3) 重力.主要产生对叶片摆振方向的弯矩,它随着叶片呈现周期性变化,是叶片疲劳载荷的主要来源[9].
2.1 风力发电机组控制策略
变速变浆风力机的运行区域如图4所示,区域1风力机转速在0~420之间,此时风力机转矩为0.当检测到外界风速满足启机条件时,桨距角转到最大迎风角度,这个角度也是风力发电机运行在区域2的桨距角.为了保持最大功率追踪,需要调节风力发电机的转速,此时对变流器进行调节,使风电机组运行在最优的Cp下.为了保证风力发电机在区域3时运行在额定功率下运行,必须达到额定转矩,区域2和区域3之间加入过渡区域.区域3有两种控制方式:一种为恒转矩控制,设置电机转矩为额定值;另一种为恒功率控制,需要控制电机的转速,使发电机的转矩与转速的乘积为恒定值[10].

图4变速变桨风力机运行区间
Fig.4Operating range of variable speed pitching machine
2.2 变桨距控制策略
区域3变桨距的目的是为了限制功率的吸收,保持输出功率的恒定,目前,变桨距系统一般分为统一变桨和独立变桨两种方式[11],目前大多数风机还是采用统一变桨方式,但随着技术的不断发展,独立变桨距技术将是未来风机的发展方向.
(1) 统一变桨距控制.控制框图如图5所示,采用统一变桨方式.输入为风轮额定转速ωref和实际转速ω,两者进行差值运算,经滤波器减小波动,输入PID控制器,PID输出与桨距角均衡值θ′相加,输出桨距角θ,需对输出桨距角进行限幅,桨距角区间为[-1° 88°].

图5统一变桨距控制策略
Fig.5 Control strategy of uniform pitch
(2) 独立变桨距控制.由于在风轮的旋转过程中处于高处的叶片和处于低处的叶片所受到的空气动力不一样,桨叶和塔架等部件的载荷在时间和空间上容易受到风切变效应、塔影效应等干扰因素的影响,容易增加叶片的疲劳损害和功率输出波动[12],独立变桨可以对3个桨距角进行独立控制,能够很好地解决这个问题.
通过安装在叶片根部的加速度传感器,测量得到叶片根部的载荷,通过park坐标变换得到风轮不平衡载荷即风轮的倾斜弯矩和偏航弯矩,独立变桨的目的是减小不平衡载荷对风机的影响.将得到的不平衡载荷经PI控制器输出d轴方向和q轴方向的桨距角,在经park逆变换得到三个叶片期望的补偿角,在与统一变桨桨距角命令进行相加,得到每个叶片的桨距角[13].独立变桨控制结构图如图6所示.

图6 独立变桨控制策略Fig.6 Control strategy of individual pitch
由上述分析可知,变桨控制方式的选择会影响风电机组及其组件的疲劳载荷,同样,疲劳载荷也会影响变桨控制器的输出,因此,研究电网故障时风电机组及其组件的暂态过程[14]有利于风电机组的安全运行.
3 实验验证
可以用MATLAB/SIMULINK和FAST软件联合研究在电网瞬变条件下和湍流风速下风力机各部件的机械载荷,并且可以设计控制器来降低这些极端环境对风力机结构和部件影响.图7为MATLAB/SIMULINK联合仿真示意图,从图中可清晰的看出FAST软件和MATLAB/SIMULINK各自实现的功能.FAST软件中有详细的风机模型,控制系统对机械部件的影响效果可以在FAST中观察到,这对研究风机接入电网的稳定性和延长风机使用寿命具有重要意义.

图7 MATLAB/SIMULINK和FAST联合仿真示意图
本文搭建了基于FAST软件和MATLAB/SIMULINK的联合仿真模型.采用1.5MW风力发电机模型,风力机的运行区间如图8所示,风力发电机组的各项参数如表1、表2所示.
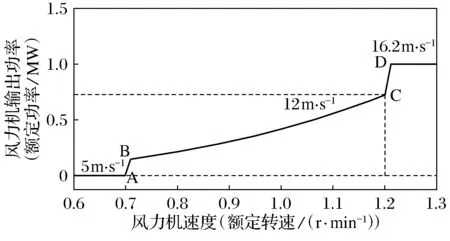
图8 风力发电机运行特性曲线Fig.8 Operating characteristic curve of wind turbines

额定功率1.5MW叶片长度55.6m风轮直径70m风轮额定转速12.1r·min-1塔筒高度80m
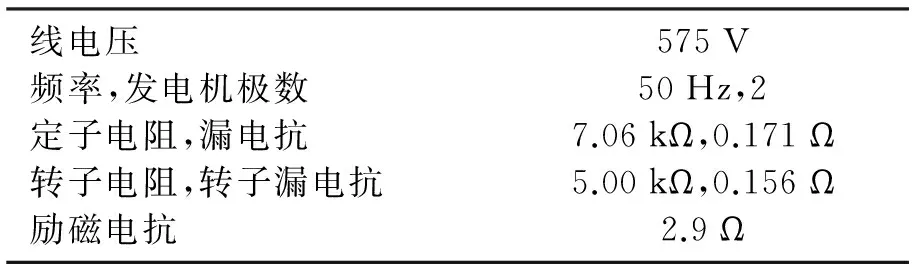
表2 双馈风力发电机参数Table 2 Doubly-fed wind turbine parameters
该模型用来模拟在风机连接正常电网过程中突然出现故障时风机的瞬态特性,这些对研究风机的操作、维护计划和风机寿命有重要意义.风速曲线如图9所示,起始风速为7 m/s,在50 s时风速变为8 m/s,由于小于16.2 m/s,变桨距控制器不起作用.

图9 风速曲线Fig.9 Wind speed curve
(1) 单相接地短路故障.设置仿真在t=20 s时,电网出现单相接地短路故障,在t=32 s时故障解除,发电机的转速、叶片挥舞载荷和摆振载荷如图10所示.
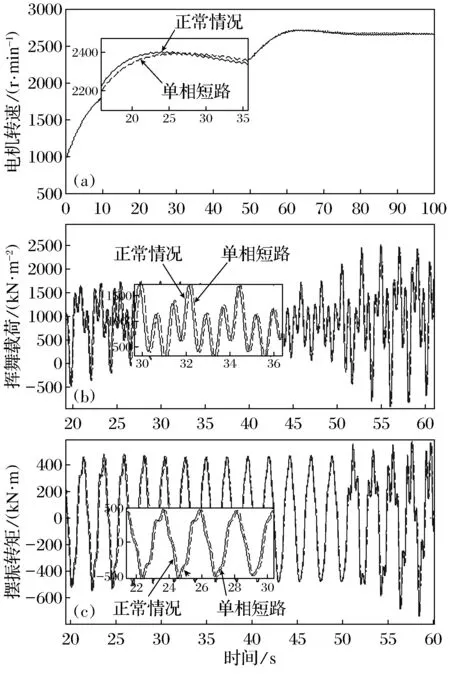
图10 单相短路时对风电机组的影响
(2) 两相短路故障.图11为两相短路时,发电机的转速、叶片挥舞载荷和摆振载荷与正常情况时的对比波形.与图10比较可知,当t=20 s发生两相短路时,发电机转速出现较大波动,叶片的挥舞转矩和摆振转矩也出现了较大波动,这对发电机的控制系统设计有重要意义.


图11 两相短路时对风电机组的影响
4 结 语
在风力发电出现的早期,风力发电不被作为发电行业的重要组成部分,但是随着技术的进步,风电行业取得了长足的进步,这也对发电机与输电线路的接口技术提出了更高的要求.随着风力发电所占发电比重越来越大,风力发电要求具备一定的故障穿越能力[15],以确保风力发电不会从电网的轻微扰动中断开.
为了保证电力系统的可靠性,对风力发电机组制造商提出了更高的要求,同样,电力系统规划设计者也需要了解风力发电的限制,通过提供辅助功能,保证电力系统安全可靠运行.基于上述思想的启发,将风力发电机制造商(FAST)工具与电力系统设计工具(MATLAB/SIMULINK)结合,以进行全面的风力发电机组的研究.
本文运用FAST软件和MATLAB软件搭建了初步的风力发电机与电网的联合仿真模型,对微电网出现故障时风力发电机的暂态过程进行了初步的研究,未来工作需要对控制策略等进行更深入的研究.
[ 1 ] 吴政球,干磊,曾议,等. 风力发电最大风能追踪综述[J]. 电力系统及其自动化学报, 2009,21(4):88-93.
WU Z Q,GAN L,ZENG Y,et al. Summary of tracking the largest wind energy for wind power generation[J]. Proceedings of the CSU-EPSA, 2009,21(4):88-93.
[ 2 ] 鲁效平,李伟,林勇刚,等. 独立变桨距风力发电机系统辨识研究[J]. 太阳能学报, 2012,33(6):1002-1009.
LU X P,LI W,LIN Y G,et al. Identification of wind turbine independent pitch control systems[J]. Acta Energiae Solaris Sinca, 2012,33(6):1002-1010.
[ 3 ] 刘兴华,敬维,林威. GH Bladed和Matlab的交互软件设计及风力发电机的独立变桨控制器仿真研究[J]. 中国电机工程学报, 2013,33(22):83-89.
LIU X H,JING W,LIN W. Interactive software platform design based on GH bladed and MATLAB with simulation study of individual pitch controller of wind turbine[J]. Proceedings of the CSEE, 2013,33(22):83-89.
[ 4 ] SONG Z,XIA C,CHEN W. Analysis of wind turbine structural loads under grid fault[C]∥International Conference on Electrical Machines and Systems. IEEE, 2008:2277-2282.
[ 5 ] ETEMADDAR M,GAO Z,MOANT. Structural load analysis of a wind turbine under pitch actuator and controller faults[J]. Journal of Physics: Conference Series, 2014,555(1):1-10.
[ 6 ] 李辉,赵猛,叶仁杰,等. 电网故障下双馈风电机组暂态电流评估及分析[J]. 电机与控制学报, 2010,14(8):45-51.
LI H,ZHAO M,YE R J,et al. Evaluation and analysis transient current of a DFIG wind generation system under grid fault[J]. Electric Machines and Control, 2010,14(8):45-51.
[ 7 ] 应有,杨帆,许国东. 大型风电机组独立变桨控制技术仿真与现场试验研究[J]. 太阳能学报, 2013,34(5):882-888.
YING Y,YANG F,XU G D. Large wind turbine technology simulation and field test study with individual pitch control[J]. ACTA Energiae Solaris Sinca, 2013,34(5):882-888.
[ 8 ] 张少帅. 风力发电机气动载荷分析及智能独立变桨控制技术研究[D]. 北京:华北电力大学, 2012.
ZHANG S S. Analysis on aerodynamic loads and research on technology of intelligent individual pitch control of wind turbine[D]. Beijing: North China Electric Power University, 2012.
[ 9 ] 戴巨川,胡燕平,刘德顺,等. 大型风电机组变桨距载荷计算与特性分析[J]. 中国科学, 2010,40(7):778-785.
DAI J C,HU Y P,LIU D S,et al. Large wind turbine pitch load calculation and characterization[J]. Science China. 2010,40(7):778-785.
[10] JIANG Z,KARIMIRAD M,MOAN T. Dynamic response analysis of wind turbines under blade pitch system fault, grid loss, and shutdown events[J]. Wind Energy, 2014,17(9):1385-1409.
[11] 邢作霞,陈雷,孙宏利,等. 独立变桨距控制策略研究[J]. 中国电机工程学报, 2011,31(26):131-138.
XING Z X,CHEN L,SUN H L,et al. Strategies study of individual variable pitch control[J]. Proceedings of the CSEE, 2011,31(26):131-138.
[12] 姚骏, 廖勇,李辉. 电网不平衡时采用串联网侧变换器的DFIG风电系统协调控制[J]. 电机与控制学报, 2010,14(12):1-8.
YAO J,LIAO Y,LI H. Coordinated control of a doubly fed induction generator wind turbine with series grid-side converter under unbalanced grid voltage conditions[J]. 电机与控制学报, 2010,14(12):1-8.
[13] ZHANG Y,CHEN Z,HU W,et al. Flicker mitigation by individual pitch control of variable speed wind turbines with DFIG[J]. IEEE Transactions on Energy Conversion, 2014,29(1):20-28.
[14] 马幼捷,杨海珊,周雪松,等. 风电系统的电压稳定性分析[J]. 电力系统及其自动化学报, 2010,22(3):22-26.
MA Y J,YANG H S,ZHOU X S,et al. Voltage stability analysis of wind power system[J]. Proceedings of the CSU-EPSA, 2010,22(3):22-26.
[15] 侯世英,房勇,曾建兴,等. 应用超级电容提高风电系统低电压穿越能力[J]. 电机与控制学报, 2010,14(5):26-31.
HOU S Y,FANG Y,ZENG J X,et al. Application of super capacitors to improve wind power system’s low voltage ride through capability[J]. Electric Machines and Control, 2010,14(5):26-31.
【责任编辑:肖景魁】
WindTurbineGeneratorsStructuralLoadsTransientAnalysisofMicro-GridFault
ShaoYichuan1,ZhuJiangning2,XuZhiying2,ZhaoQian3,LiXin1,MaLianbo4
(1. School of Information Engineering, Shenyang University, Shenyang 110044, China; 2. Department of Mathematics and Computer Science, Chaoyang Teachers College, Chaoyang 110055, China; 3. School of Science, Shenyang University of Technology, Shenyang 110023, China; 4. Software College, Northeastern University, Shenyang 110000, China)
The influence of micro-grid fault on the electrical and mechanical loads of wind turbines was focused. Based on FAST software and MATLAB/SIMULINK software, joint simulation model was established. The output speed of the wind turbine and the load of the key part of the wind turbine when the grid fails were simulated. The proposed method has the reference value on the stability of the wind turbine connected to the grid and when grid fault has an important impact on wind turbine.
micro-grid; wind turbines; fatigue load; simulation model
TM 614
A
2017-08-08
国家自然科学青年基金资助项目(61503373); 中国博士后基金资助项目(2016M601332); 辽宁省博士启动基金资助项目(201601217).
邵一川(1978-),男,辽宁沈阳人,沈阳大学副教授.
2095-5456(2017)06-0473-06
