船舶电力系统燃气轮机组双机并联运行建模与仿真
2017-12-14谢嘉令施伟锋卓金宝
谢嘉令,施伟锋,卓金宝
船舶电力系统燃气轮机组双机并联运行建模与仿真
谢嘉令,施伟锋,卓金宝
(上海海事大学,上海 201306)
海洋船舶正朝着超大型方向发展,燃气轮机凭借其启动速度快,功率密度大等特点,正越来越多的被应用到船舶电力系统的发电系统中。同时由于全电船的出现,中压电力系统正逐渐成为大型海洋船舶电力系统的发展方向。由于电力推进船的电动机单机容量大于发电机单台容量,通常会使多台发电机并联运行,从而保证电站的可靠性以及使发电机运行在最佳状态。本文通过对以燃气轮机作为原动机的4.16kV船舶中压电力系统进行建模,同时对发电机组并车工况进行仿真。仿真实验验证了此系统模型的正确性,可以用于船舶中压电力系统运行工况的仿真和分析。
船舶中压电力系统 发电机组并联运行 自动并车装置 燃气轮机
0 引言
当前,大型海上船舶的推进方式从内燃机推进逐渐转变为全电力推进,船舶电力推进系统进入了一个新的发展时期。随着全电船的应用,船舶电力系统的容量与结构发生了突破性的变化,中压电力系统成为大型海洋船舶电力系统的发展方向[1]。现代船舶发电系统主要采用柴油机或燃气轮机作为原动机。凭借着单机功率大、体积小、重量轻、机动性好、可靠性高和震动小等特点,燃气轮机组发电成为目前电力推进船舶的主要发电技术之一。为研究燃气轮机组发电在实际船舶中压电力系统中的应用,需要建立可以模拟实际系统的数字仿真模型。
目前已有大量的文献对船舶中压电力系统进行研究,文献[4]着重于燃气轮机的电气特性对燃气轮机进行建模,文献[5]采用了分层结构和模块化设计,对船舶电力系统进行建模并且具有稳态、动态仿真的功能。文献[6]对一次典型的发电机组逆功率停机事件进行深入剖析,并结合实际仿真给出具体的建议。文献[7]对多台柴油发电机组在并联运行过程中的并车工况进行了仿真研究。文献[8]结合19100TEU集装箱船"大西洋"轮对中压电力系统的结构组成及特点进行建模。上述研究的发电系统原动机大多为柴油机,功率较小。
本文利用Matlab/Simulink仿真软件,建立了以燃气轮机为原动机,以推进电机为主要用电单元的4.16kV船舶中压电力系统模型,最后对发电机组并车工况进行仿真。仿真结果表明此系统模型可以有效模拟燃气轮机发电机组在中压船舶电力系统中实际运行的状态,为中压船舶电力系统中发电机组的优化控制研究提供了基础。
1 电力推进船舶电力系统基本结构
某超大型集装箱船舶中压电力系统,其基本结构如图1所示。该船舶采用4.16 kV中压电力系统,此系统由两组30MW/ 4.16 kV/ 60 Hz燃气轮发电机组(1、3号机组)以及一组15MW/ 4.16 kV/ 60 Hz燃气轮发电机组(2号机组)作为发电单元提供电力,同时备有一组10 MW应急发电机组作为应急发电单元。
中压电力系统以主配电屏作为电能管理和分配装置,电力负荷配置有一台20 MW的主推进电机、一台15 MV的辅助推进电机和一台5 MW的侧推器,将锚机、起重机和牵引机等统一而成的短时负载,以及将冷藏、通风和220 V低压系统等负载统一为全时间段消耗电能的基本负载。
2 同步发电机组的并联运行
2.1 同步发电机的并车条件
对于一个运行中的电站,在进行三相同步发电机准确同步并车操作时,要求待并发电机组与电网的电压、频率以及相位一致,若在此瞬间将待并发电机组主开关合闸投入电网,则在待并发电机组与电网(或运行发电机组)之间不会产生冲击电流,这是准确同步的理想情况。
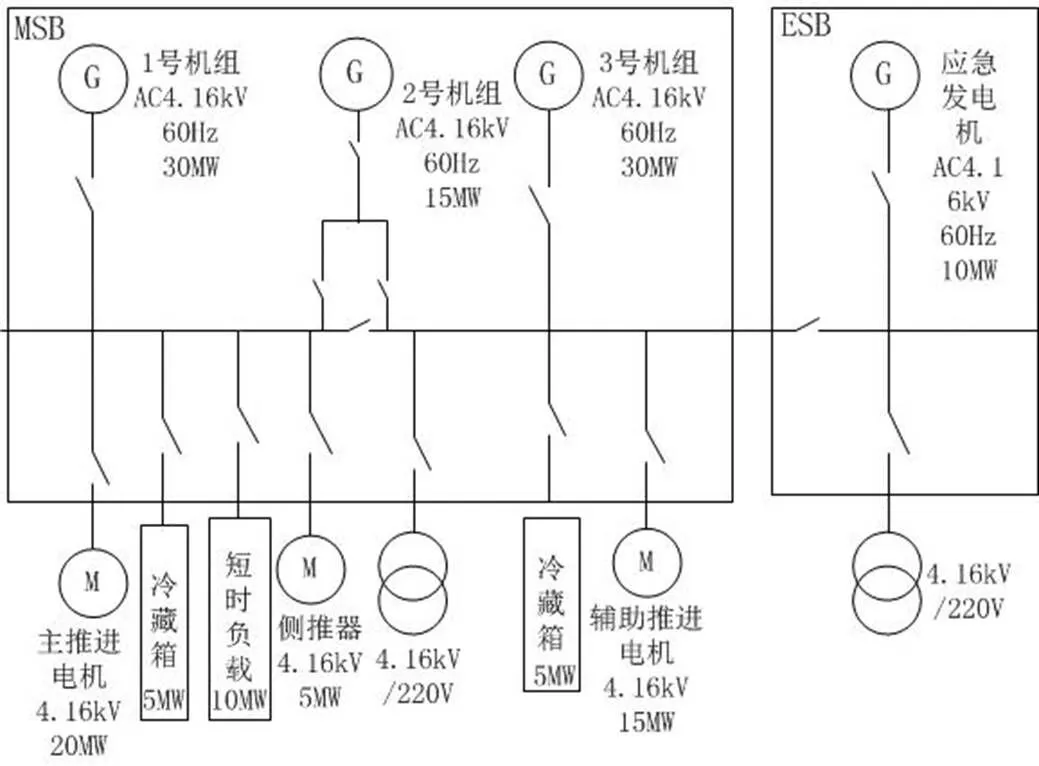
图 1超大型集装箱船舶中压电力系统结构图
然而在进行实际并车操作时要达到这种理想情况是不可能的。一般情况下,要求并网时待并发电机组端电压和电网电压之间误差不超过10%,频率差不超过0.5 Hz,相位差不超过15电角度。
当并车的任一条件不满足时,发电机组间会产生冲击电流[3]。当冲击电流在许可范围内时,可以将两台发电机拉入同步,有助于发电机并车。但是过大的冲击电流可能会导致并车失败或者使系统电压下降,甚至出现跳电,损坏机组等事故。
2.2 自动并车装置
船舶同步发电机的自动并车装置包括手动操作的全部逻辑程序,可以自动完成手动并车操作全过程,并且具有以下功能:1)判断待并发电机与电网电压差、频率差和相位差,当任意条件不符合并车要求时,实现闭锁,不允许发出合闸指令;2)检测待并发电机与电网的频差的大小和方向,自动对待并发电机发出调频信号,缩小频差,直到满足并车条件为止;3)当电压差、频率差在允许范围内时,自动捕捉相位条件,相位条件满足后才允许发出合闸指令;4)合闸指令的发出应该考虑到发电机开关固有动作时间,即需要有提前量,从而保证合闸瞬间具有最小的合闸相位角,并使并车的冲击电流达到最小。并车装置大致可以分为三大部分:调压、调频与合闸部分,图2为其原理图。
3 中压电力系统建模
3.1 燃气轮发电机组建模
船舶发电机组是将机械能等其他形式的能量转化为电能的装置。燃气轮机组系统控制框图如图3所示。本文注重燃气轮机组的电气特性,采用标幺制的隐极同步发电机,选用IEEEAC1A型标准励磁模型进行建模。
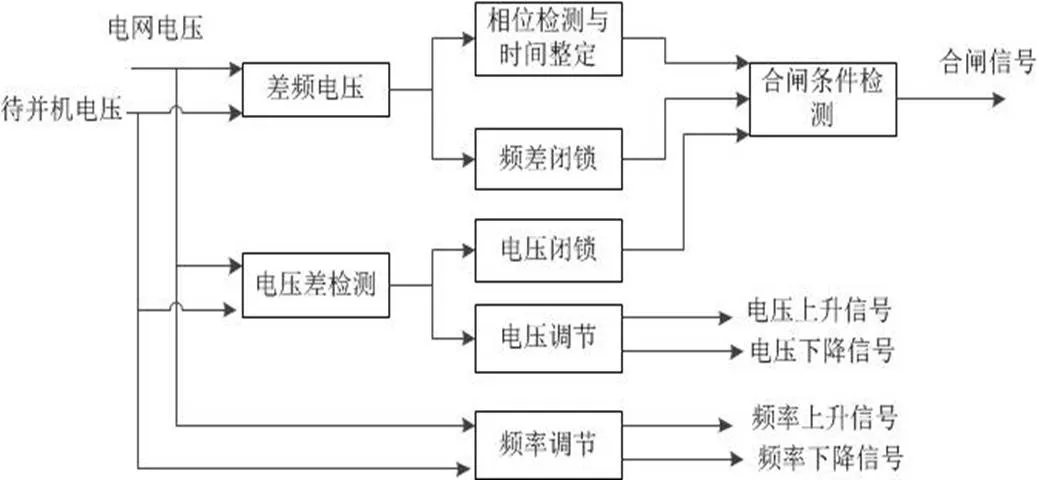
图2 自动并车装置原理图
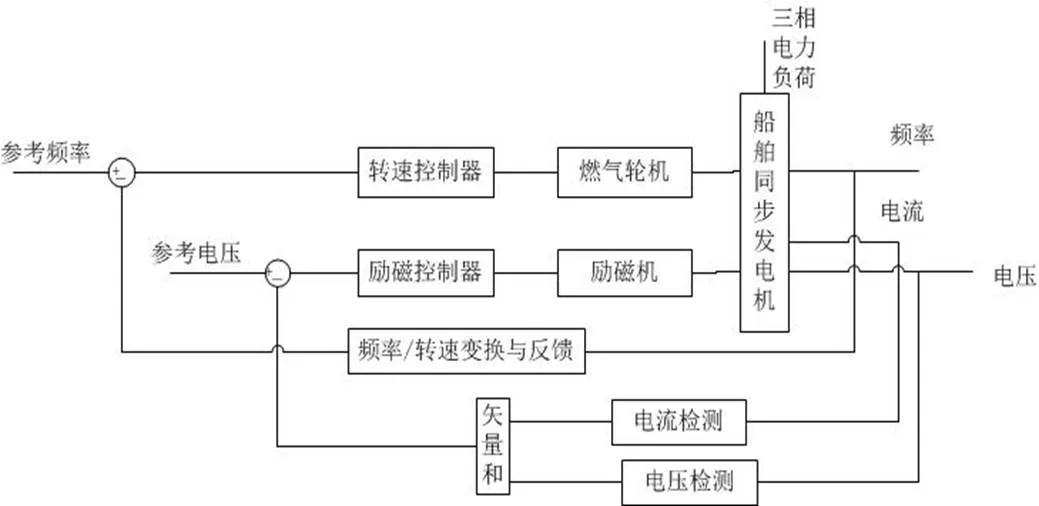
图3 燃气轮机发电机组控制框图
3.2 准同步并车装置建模
3.2.1压差检测模型

由此我们可以得到如图4所示的压差检测模型。
3.2.2频差测量模型
为测量频率,本文通过将待测电压转变为方波信号,先测得方波信号的周期,由该周期即可得出电压的正弦周期,经过换算,即可得出原来正弦波的频率。根据上述原理建立如图5所示的频差模型。
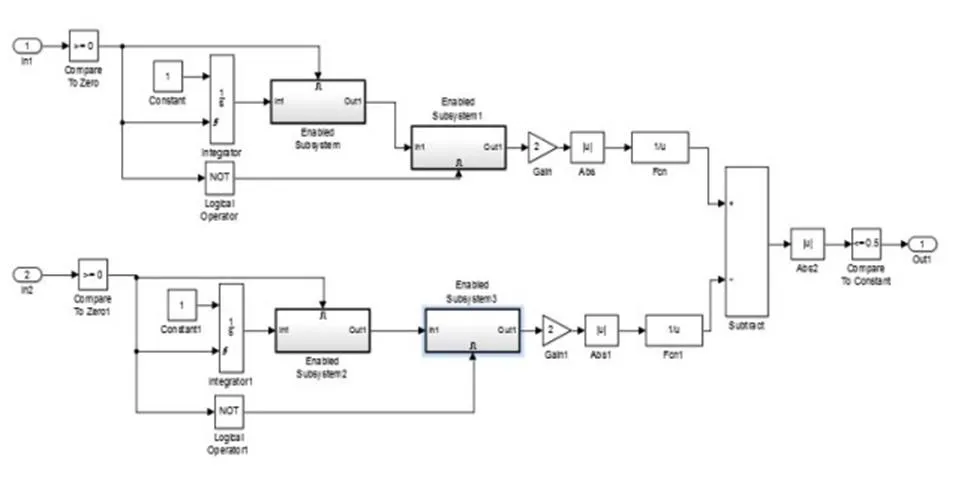
图5 频差检测模型
3.2.3相角差测量模型
根据发电机并车要求,电网与待并机组之间的相角差在±15°内。因此相角差检测装置的作用就是检测电网与待并机组件的相角差是否在要求范围内,即满足式(3)
为检测相角差,同样先将待并机和电网的电压正弦波转变成矩形方波,通过“异或”逻辑运算,得到一系列异或方波,输出的异或方波的宽度与相角差一致[8]。通过上述原理即可建立如图6所示的相角差检测装置的模型。
3.3 负载建模
推进电机是船舶综合电力系统中最主要的大功率负载,通常永磁同步电动机和异步电机都可以作为推进电机。本文采用标幺制的鼠笼式异步电动机对推进电机进行建模。设螺旋桨转矩与电机转速的平方成正比,即满足式(4)
为简化模型,本文将照明设备、电子设备等统一成静态负载即R-L负载。船舶电力系统中的静态负载为感性负载,满足式(5)

且静态负载一般满足式(6)
4 系统运行与并车仿真
4.1 单发电机组投切静态负载仿真
当发电机空载稳定运行时,于4.99s突加功率因数为0.33、功率是发电机功率的60%的静态负载,稳定运行一段时间后,于10s突卸负载,观察发电机端电压变化情况。发电机组端电压变化如图8所示。
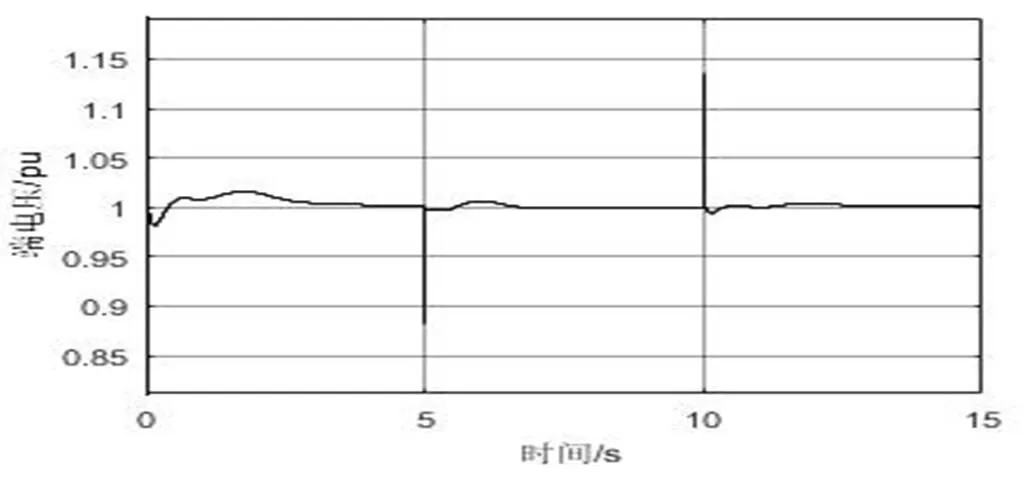
图8 发电机端电压变化曲线
从图8可知,发电机稳定运行后,其端电压保持额定电压,在4.99 s突加60%负载瞬间,端电压值突降至额定电压88%,再次稳定后,于10 s突卸负载,端电压最大上升至113.5%,经过约0.5 s恢复稳定。结果表明该发电机组符合《钢质海船入籍规范规定》中所提及的发电机组调压特性要求。
发电机组空载稳定运行,于10 s突加50%额定负载,稳定后于20 s再加剩余的50%。观察原动机瞬时转速。发电机组转速变化如图9所示
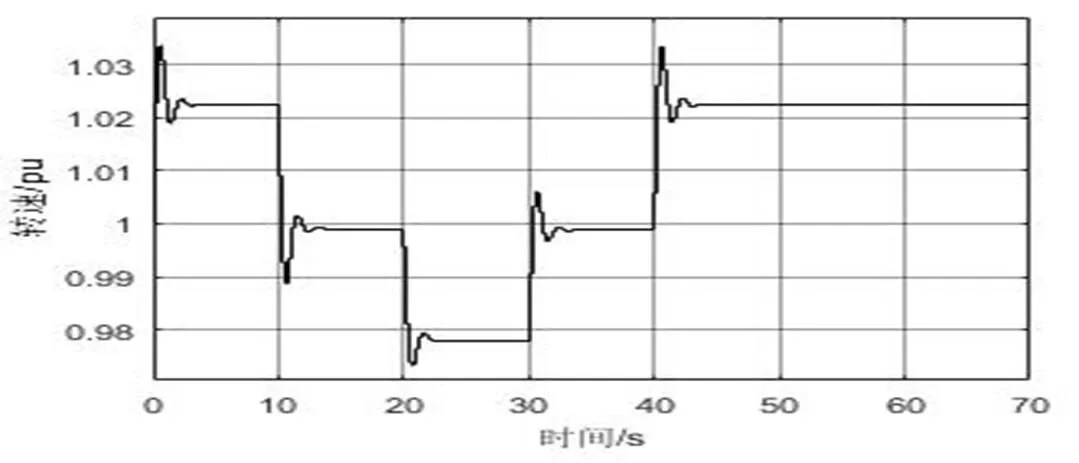
图9 发电机转速变化曲线
4.2 双机并车运行
4.2.1不考虑发电机组并车条件
一台待并的30 MVA汽轮机,带18 MVA的负载启动,另一台30 MVA的汽轮机在网运行,10 s前在网的负载有2个10MW的静态负载。于7.266 s时发出并车指令(0为不发出,1为发出),7.304 s时合闸(0为不合闸,1为合闸)并车成功,观察电网冲击电流以及发电机各项参数变化情况。
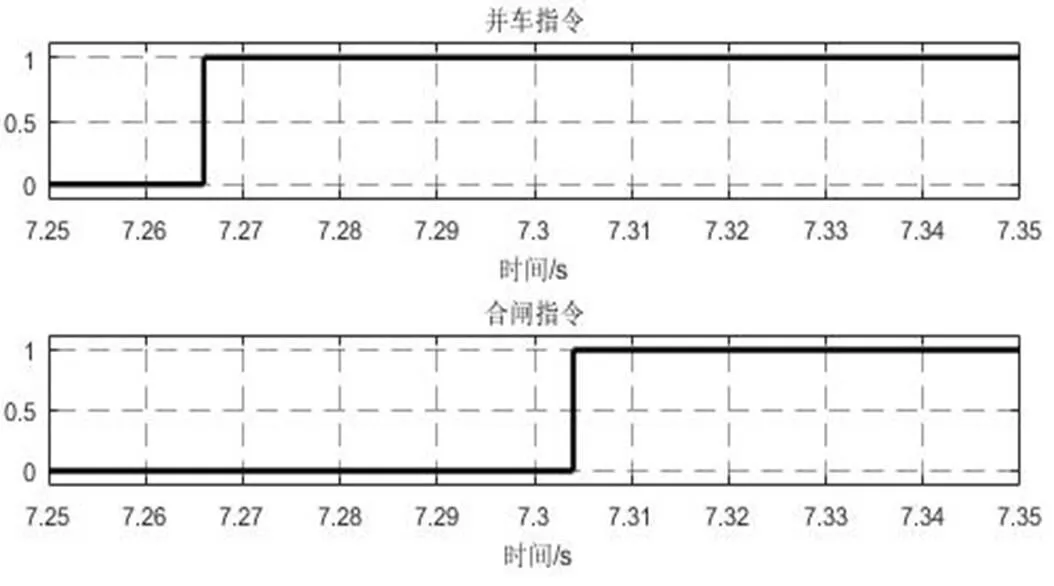
图10并车指令与合闸指令
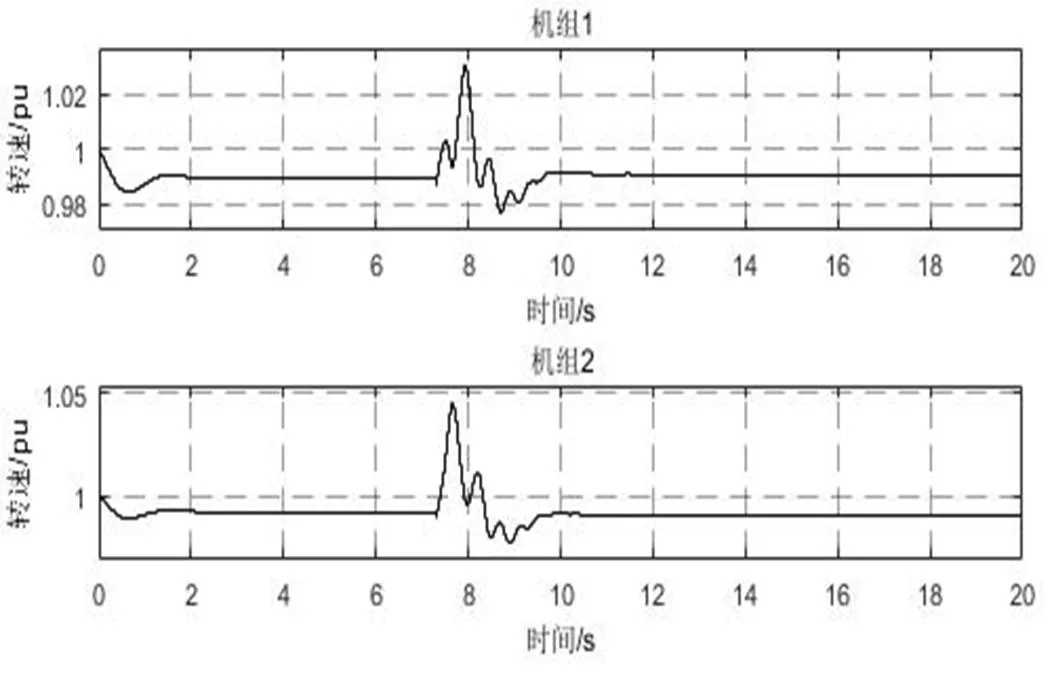
图12 两发电机组转速变化曲线
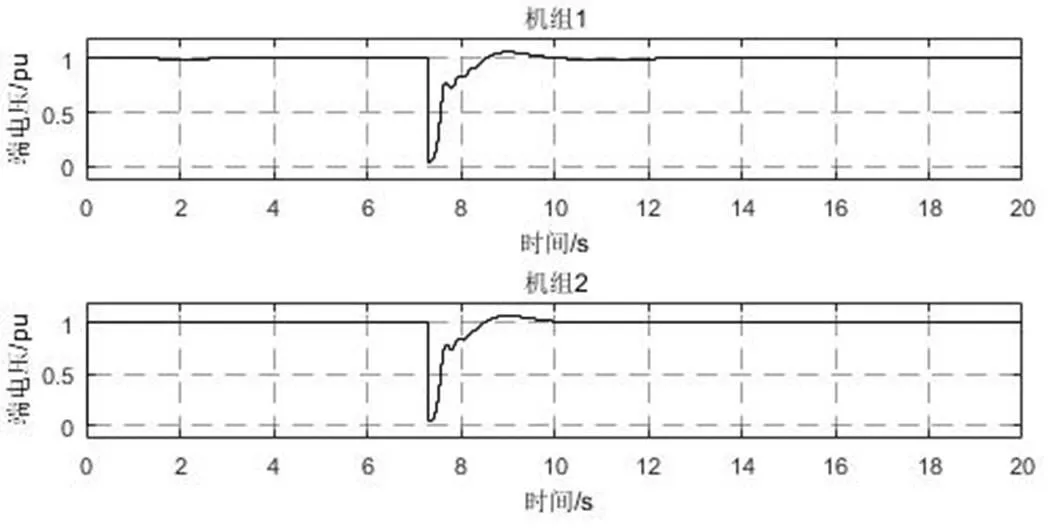
图13 两发电机组端电压变化曲线
从图10~图14可以发现,并车指令于7.266 s发出,但是由于此时不符合并车条件,并车装置于7.304 s左右才发出合闸指令,此时并网发电机在两台发电机组间引起数倍于额定电流的冲击电流,过大的冲击电流可能会引起设备损坏。
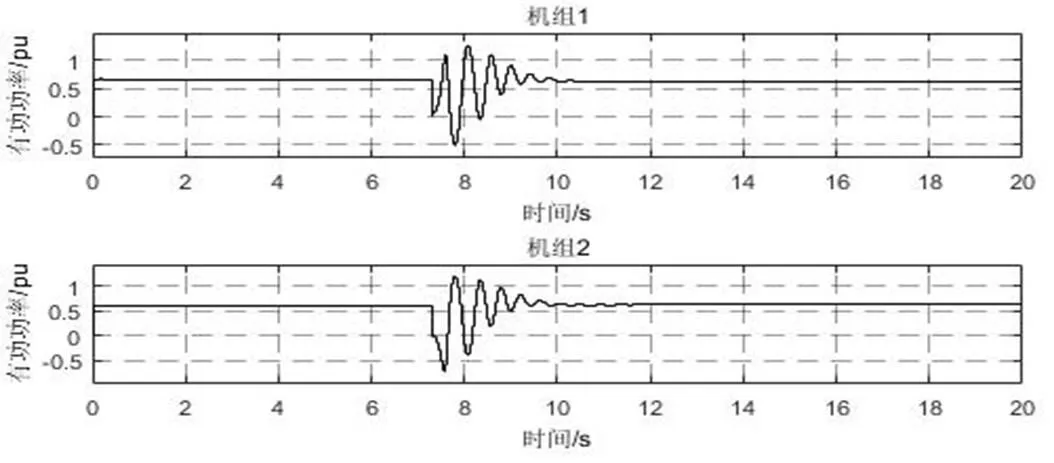
图14 两发电机组输出功率变化曲线
4.2.2考虑发电机组并车条件
现将并车信号于最小压差时刻发出即待并机于4.869 s时并入电网,仿真数据如图所示
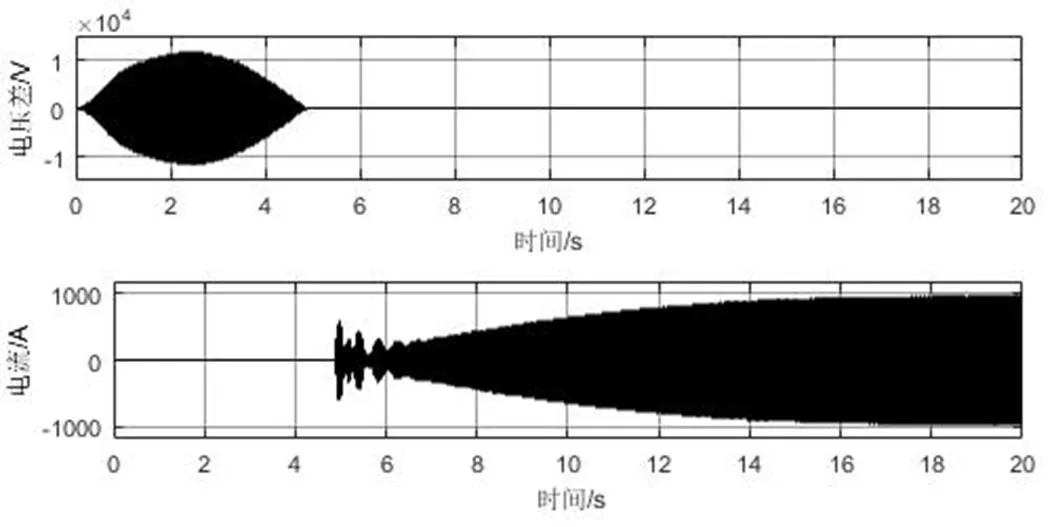
图15 合闸压差与冲击电流
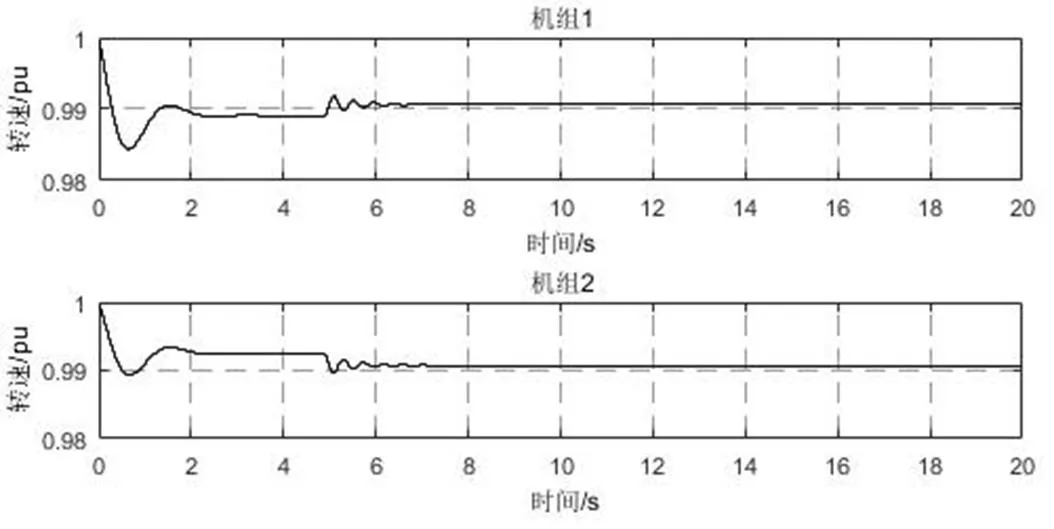
图16两发电机组转速变化曲线
通过图15~图18可知,并车瞬间,两发电机间冲击电流很小。并车过程中,发电机各参数变化平稳。并车瞬间发电机端电压略高于其额定电压,其原因是为了向系统输入无功功率。并车前由于1号机组负载较大,故1号机组发出的功率大于2号机组。并车后由于调频调载的作用,使得两台发电机有功功率得到平均分配。
通过对双机并车运行进行模拟仿真后可知,在合适的时机合闸,可以减小发电机间的冲击电流,从而延长设备使用寿命。其次发电机组的自动调压装置通过调节发电机励磁电流对电压进行控制,这为并联发电机负荷均分提供了基础。
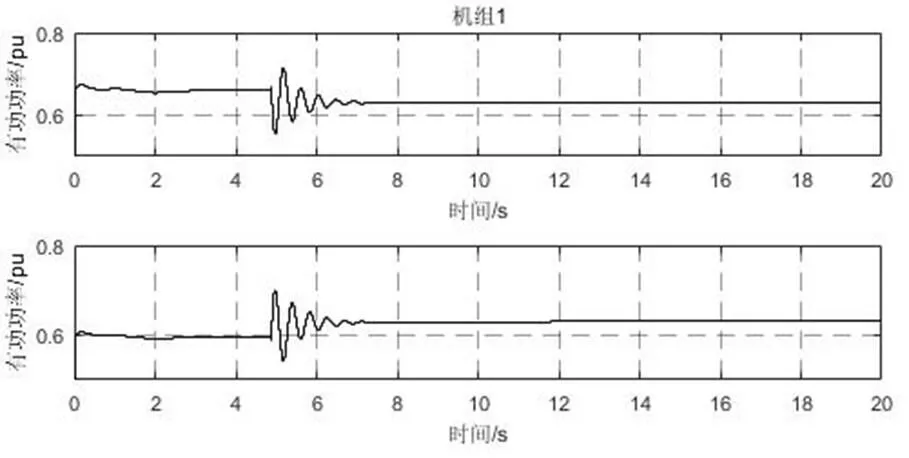
图18 两发电机组输出功率变化曲线
5 结论
本文根据船舶发电机组的并车原理,基于Matlab/Simulink仿真工具对某超大型集装箱船舶中压电力系统的并网过程进行了仿真分析。分析了发电机组的调压特性与调速性能,仿真结果表明本文所建立的燃气轮机发电机组仿真系统可以反映船舶电力系统运行状态,可以用于船舶中压电力系统仿真研究;通过对并车工况的仿真,证明了并车装置的有效性以及合闸时机选择的重要性。通过上述仿真实验,进一步表明该电力系统模型有能力对船舶实际运行的情况进行仿真。
[4] 施伟锋,许晓彦. 船舶电力系统建模与控制[M]. 北京:电子工业出版社, 2012.
[5] 薛士龙. 船舶电力系统及其自动控制[M].北京:电子工业出版社,2012.
[6] 姜锦范. 船舶电站及自动化[M].大连:大连海事大学出版社,2006.
[7] 卓金宝,施伟锋,张威. 船舶电力推进中燃气轮机发电机组建模与仿真[J]. 计算机仿真, 2016,33(12):143-147.
[8] 王淼. 全电力推进船舶电力系统的数字仿真[J].电工技术学报,2016,21(4):62-67.
[9] 邢瑞江. 基于Matlab的大机组程序逆功率停机事件的分析[J]. 发电技术,2015,36(164):36-38.
[10] 万伟学. 船舶发电机组并车稳定性建模及仿真[J].船电技术,2016,36(12):40-45.
[11] 郑恒持. 船舶中压电力系统建模与仿真[D]. 辽宁:大连海事大学,2017.
Modeling and Simulation of Parallel Operation on Gas Turbine Sets of Marine Electric Power System
Xie Jialing, Shi Weifeng, Zuo Jinbao
(Shanghai Maritime University, Shanghai 201306, China)
TM 31
A
1003-4862(2017)11-0008-05
2017-09-15
谢嘉令(1991-),男,硕士生。研究方向:船舶、港口系统的建模与控制。