一种无盲区的地铁站台异物自动检测设想
2017-12-09谭飞刚汪洋刘开元
谭飞刚, 汪洋, 刘开元
(深圳信息职业技术学院交通与环境学院,广东 深圳 518172)
【信息技术应用研究】
一种无盲区的地铁站台异物自动检测设想
谭飞刚, 汪洋, 刘开元
(深圳信息职业技术学院交通与环境学院,广东 深圳 518172)
针对地铁站台屏蔽门与车门间空隙而引起乘客夹伤等运营事故的现象,研究者们提出了一些地铁站台空隙异物自动检测的方法。然而,这些方法都是基于缝隙中某个平面检测而设计,无法实现对整个空隙的立体空间进行无盲区检测。此文在分析了上述方法的基础上,提出了一种基于视频对射式的地铁站台无盲区异物自动检测设想。该方法通过在站台两端屏蔽门立柱上设置光幕作为参照物,同时在立柱上安装视觉摄像机对光幕图像进行完整性检测,从而实现空隙立体空间异物无盲区检测。经理论分析,本方法具有可行性和较大的实用价值。
机器视觉;地铁站台;异物检测;无盲区;站台空隙
引言
随着科学技术的不断发展,我国城市轨道交通目前处在一个高速发展的阶段,预计到2020年,我国城市轨道交通累计营业里程将达到7395公里,全国拥有轨道交通的城市将达到50个[1]。城市轨道交通不仅方便了人民的出行,而且也缓解了城市道路拥堵问题。目前几乎所有的地铁站台都安装了屏蔽门将站台与隧道空间隔开来为给乘客提供安全、舒适的候车环境,同时减少一些运营安全事故。虽然屏蔽门可以有效的减少隧道列车行驶产生的噪声以及乘客掉入轨道的风险,但是屏蔽门与车门之间存在至少10厘米的空隙。如果在列车启动时,该空隙中存在异物则会影响行车安全,造成运营安全事故。例如2014年11月6日下午,在北京地铁5号线的惠新西街南口站里一名女性乘客被夹在站台屏蔽门和地铁车门中间,列车启动后导致该乘客坠落隧道,后经抢救无效不幸身亡;2017年4月20日,上海轨道交通4号线蓝村路站一名乘客被夹在屏蔽门与车门之间,幸好地铁驾驶员瞭望发现异常进行二次开关门使得乘客脱险。因此,设计一种快速、准确、高效的缝隙异物自动检测算法具有非常重要的应用价值和研究意义[2,3]。
目前,针对地铁站台屏蔽门与车门间缝隙异物自动检测的方法可分为三种,即基于激光探测的方法、基于红外光幕探测的方法和基于机器视觉的方法。基于激光探测的方法则利用激光聚光效果好和检测距离长的优点,通过在车头处安装激光发射器和车尾处安装接收器来实现激光的发射与接收,进而间接判断缝隙中是否存在异物。基于红外光幕探测的方法与基于激光探测的方法在原理上类似,但是因红外光的聚光效果不如激光,因此其需要多段接力才能完成对整个站台缝隙的异物自动检测。由于列车在隧道中行驶会产生的粉尘、震动等使得上述两类方法容易产生误检。
伴随着计算机科学和电子通信技术的飞速发展,现在的摄像机体积越来越小,分辨率越来越高,网络传输速度越来越快,同时也带动着机器视觉的应用研究。例如行人检测[4,5]、行人跟踪[6]等已得到了实际的应用。黄华文等[2]首次提出了一种基于机器视觉的地铁屏蔽门与车门间异物自动检测方法。该方法是通过在车头处安装两台摄像机来拍摄车尾处灯带,并通过检测灯带的完整性来缝隙中是否存在异物。该方法相比于前两种方法而言,具有检测盲区小、抗震性强等优点。由于灯带的区域范围有限,因此该方法在横向区域和离摄像机近的区域仍存在较大的盲区。因此,本文在此基础上提出了一种基于视频对射式的地铁站台无盲区异物自动检测方案。
1 方案介绍
1.1 摄像机对射方式设置
根据摄像机成像原理可知,摄像机拍摄区域呈射线发射。那么,离摄像机越近,其拍摄范围就越小,所对应的盲区就越大。因此,如果按黄华文等[2]方法将多个摄像机安装在车头方向屏蔽门立柱的位置上,其仍存在较大的盲区范围(如图1所示)。本文则基于摄像机成像原理,在车头和车尾方向的屏蔽门立柱上分别安装一套光幕发射装置和一台摄像机,那么其在整个光幕区域将实现无盲区拍摄(如图2所示)。从图1和图2的对比中不难发现,本文所提方案可以实现对整个屏蔽门与车门间空隙的无盲区检测。此外,黄华文等提出的方案仅能检测灯带所在的一个平面区域,而本文所提方案因采用光幕的方法,其产生的参照物区域可以覆盖整个缝隙区间,因此可以对整个缝隙区域实现立体且无盲区检测。
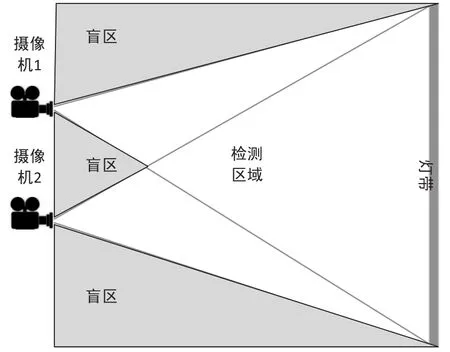
图1 文献[2]所提方法检测区域示意图Fig.1 The diagram of detection area of the literature [2]proposed method

图2 本文所提检测方案检测区域示意图Fig.2 The diagram of detection area of the proposed method
1.2 光幕和摄像机位置设置
因为地铁列车与屏蔽门之间的缝隙距离有限,如果安装太大设备可能侵入行车线从而影响行车安全。因此,本文所提方案则在站台两端的屏蔽门端门的立柱上分别安装一排聚光性好的灯带,灯光朝车门垂直方向射出形成光幕,同时,灯带发射的光照射在车身上经车身反射后再次照入空隙中,从而进一步加强了空隙光幕亮度。此外,在一条灯带的上方安装一台摄像机而在另一条灯带下方安装一台摄像机,形成对角模式(如图2所示)。该方案因为车头处灯带产生的光幕离司机瞭望处比较近,因此司机仍可以透过光幕继续瞭望空隙中相关情况,即不影响现有的人工检测模式。此外,为了减少光幕对行车的影响,本方案还可以通过对光幕发光时间进行设置。比如只有在列车进站后,才能给灯带通电,整个检测系统才能运行检测;当列车接收到速度码开始离站时,灯带断电,从而避免光幕对车厢乘客的视觉造成影响。此外,灯带只在特定时间(即列车在车站停靠时间段内)通电还可以节约列车不在站台时的耗电,相比于目前一直常亮的灯带而言,可以节约车站用电量进而节约运营成本。
1.3 异物检测
光幕在空隙中形成一种带颜色的幕,因此,摄像机拍摄到光幕视频后以此光幕图像为参照物结合机器视觉技术来提取光幕的相关属性信息(如长度、宽度、面积、轮廓等),并通过与光幕模板属性进行对比变化差异。如果差异变化大于设定的阈值则认为空隙中存在异物,则发出声光报警提醒司机延迟启动列车并查看空隙,反之则认为空隙无异物。在光幕属性信息提取方面可以利用已有的颜色检测方法,如YUV颜色空间、LAB颜色空间等。此外,还可以利用网络将各路摄像机拍摄的画面传输至车头处供列车司机人工查看。
1.4 方案优势
本文所提方案与现有的基于视觉的方法相比具有以下优势:
(1)光幕作为参照物既可以填充整个空隙,又不用担心光幕侵入行车线的危险。
(2)前后两台摄像机对角拍摄光幕可以对整个空隙实现无盲区异物自动检测。
(3)因光幕填充了整个空隙,因此其抗震性、防尘性更好。
(4)光幕定时开启和关闭,可以节约设备用电,进而节约运营成本。
与现有其它车门与屏蔽门间异物自动检测方法相比,其对比结果如表1所示。从表中对比结果,不难看出,本文所提设想优于当前其它的车门与屏蔽门间异物自动检测方法。
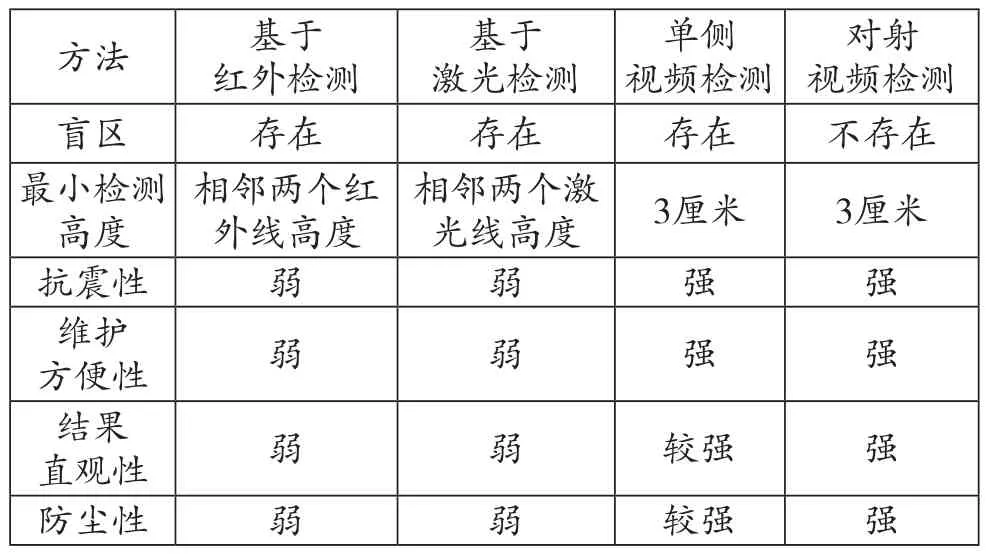
表1 不同异物自动检测方法对比结果Tab.1 The Comparison results of different foreign body automatic detection methods
2 结论
针对地铁站台屏蔽门与车门间空隙夹人夹物而造成运营安全事故现象,本文在分析了相关空隙异物自动检测方法的基础上提出了一种基于视频对射式的地铁站台无盲区异物自动检测方案。该方案与已有方法相比,具有无盲区、抗震性高和防尘性好等优点,同时通过定时开启和关闭灯带可以减少车站用电量节约运营成本。因此,本文所提方案具有重要的经济效益和社会效益。对地铁安全运营具有较大的指导意义。
[1]北京智博睿投资咨询有限公司,2017-2022年中国城市轨道交通信息化行业市场前瞻与投资战略规划分析报告[M].2016.Beijing zhiborui investment consulting co.,LTD.Report of market demand and investment strategy planning analysis on China urban rail transit informatization industry (2017-2022)[M].2016.(in Chinese)
[2]黄华文,刘伟铭,李军,等.地铁屏蔽门与车门间异物自动检测技术[J].铁路计算机应用,2015(12):62-65.HUANG Wenhua,LIU Weiming,LI Jun,e t.al.Automatic foreign object detection technology between PSD and subway doors[J].Railway Computer Application,2015(12):62-65.(in Chinese)
[3]谭飞刚,刘建.一种基于计算机视觉的地铁站台异物检测算法[J].铁路计算机应用,2017,26(1):67-69.TAN Feigang,LIU Jian.Foreign objects detection algorithm for subway platform based on computer vision[J].Railway Computer Application,2017,26(1):67-69.(in Chinese)
[4]谭飞刚,刘伟铭.多部件验证的双层行人检测算法[J].华南理工大学学报:自然科学版,2015,43(1):79-86.TAN Feigang,LIU Weiming.Two-Stages Pedestrian Detection Algorithm Based on Multi-Com ponent Validation[J].Journal of South China University of Technology (Natural Science Edition),2015,43(1):79-86.(in Chinese)
[5]谭飞刚,刘伟铭,黄玲,等.基于加权欧氏距离度量的目标再识别算法[J].华南理工大学学报:自然科学版,2015(9):88-94.TAN Feigang,LIU Weiming,HUANG Ling,et.al.Object Re-Identification Algorithm Based on Weighted Euclidean Distance Metric [J].Journal of South China University of Technology (Natural Science Edition),2015,43(1):79-86.(in Chinese)
[6]Tan F,Liu W,Huang L,et al.Pedestrian tracking algorithm with adaptive feature fusion[J].Journal of Computational Information Systems,2015,11(4):1529-1536.
【责任编辑:杨立衡】
Envisage of Automatically Foreign Objects Detection of Non-blind Spots on Subway Station
TAN Feigang,WANG Yang,LIU Kaiyuan
(School of Traffic and Environment,ShenZhen Institute of Information technology,Shenzhen 518172,China)
ion: Some automatic foreign objects detection methods have been proposed for operational accidents caused by the gap between train door and platform screen door clamping passengers.However,these methods can't detect foreign objects in the entire three-dimensional space with non-blind spots since they are all based on a plane in the gap.After analyzing these methods,an envisage of automatic foreign objects detection of non-blind spots is proposed.It can achieve automatic foreign objects detection of non-blind spots in the gap through installing light screens as a reference and cameras to detect the integrity of the light screen on screen door pillars on the platform.
computer vision; subway station; foreign objects detection; non-blind spots; platform gap
U298
A
1672-6332(2017)03-0025-04
2017-7-5
校级青年培育项目(QN201709)。
谭飞刚(1987-),男(汉),湖南永州人,高级工程师,博士,主要研究方向:机器视觉,城市轨道交通,智能交通系统。E-mail:tanfg@sziit.edu.cn
