一种仿生感觉毛气流传感器*
2017-12-08边义祥孙凯旋刘榕榕
边义祥,张 弋,何 灿,孙凯旋,刘榕榕
(扬州大学机械工程学院,江苏 扬州 225127)
一种仿生感觉毛气流传感器*
边义祥*,张 弋,何 灿,孙凯旋,刘榕榕
(扬州大学机械工程学院,江苏 扬州 225127)
模仿昆虫感觉毛的结构,设计制备了表面对称电极含金属芯PVDF气流传感器SMPF(Symmetric Metal core PVDF Fiber)。利用自制的拉制纤维设备,制备了SMPF胚体。在表面涂镀对称电极后,经过高温极化、电极封装等工艺后,成功制备了SMPF气流传感器。基于第1类压电方程和流体力学理论,建立了悬臂梁结构的SMPF气流传感模型,分析了传感器输出信号与纤维长度、气流速度以及气流作用方向之间的关系。将悬臂梁结构的SMPF安置在气流流场中,进行冲击气流测试实验。实验结果表明,SMPF气流传感器的输出信号与纤维长度成非线性关系,与气流速度成平方关系,与气流作用方向成“8”字形关系。实验结果验证了理论模型,表明SMPF传感器能够感知气流的速度和作用方向,具有较广泛的工程应用前景。
气流传感器;仿生传感器;压电方程;PVDF纤维;表面对称电极
在自然界中,雄性蚊子通过触角及其上密布的纤毛,感知周围的气流,进而判断周围雌性蚊子的方位,进行求偶活动[1];蟋蟀通过尾纤上密布的纤毛感知周围气流的流动方向和速度,从而判断捕食者的方位,躲避天敌[2-4];鱼类通过侧线系统感知周围水流变化,辨别食物方位,躲避捕食者[5-6];水黾通过四肢上的毛发感受器感知水面波纹的变化,通过水面波纹传递的信息确定水面物体的具体方位,进行捕食[7]。上述这些生物都是通过生长于体表的毛发感受器,感知周围的气流或水流运动情况。这类毛发感受器均为悬臂梁结构,即一根长长的纤毛连接在它们的感觉神经细胞上,另一端悬空呈自由状。当有外部激励作用在这些纤毛上时,纤毛会产生弯曲或振动变形,进而作用在它们的神经细胞上,产生神经冲动,沿着神经纤维传递给它们的大脑,大脑通过对不同的神经信号进行分析和判断,产生相应的应激反应[8]。
受到动物感觉毛感知机理的启发,一些研究者设计制备了仿生毛发传感器,用来感知周围流场的变化。目前,大部分仿生人工毛发传感器主要是基于蟋蟀尾纤结构的仿生,即采用悬臂梁结构,一端固定于基体、并与其垂直,另一端呈自由状。仿生人工毛发传感器,按照传感原理可以分为3种形式,分别为电容式、压阻式和压电式[9]。电容式传感器中的悬臂梁根部与一个微型活动电容相连,当悬臂梁在外部激励作用下产生倾转时,将改变活动电容值,通过测量活动电容值的改变量,可以计算出悬臂梁受到的激励[10]。压阻式传感器的结构和电容式类似,一根悬臂梁的根部和压阻元件相连,通过测量压阻元件阻值的变化,计算出悬臂梁受到的激励[11]。
压电材料具有直接的机电转换性能,做成悬臂梁结构时,通过测量响应电荷值,可以直接计算出悬臂梁受到的外部激励。压电式仿生毛发传感器一般为圆形截面,分为含芯和不含芯两种形式。我们在前期的工作中,主要采用压电陶瓷材料制备含金属芯压电纤维,并在纤维的表面涂镀全部电极、部分电极、2片对称电极、4片对称电极等,用作动态微力传感器或气流传感器[12-13]。但是,由于压电陶瓷是脆性材料,这种类型的仿生毛发传感器在大的载荷或长期的低频激励作用时,容易损坏,失去传感能力。
为了克服压电陶瓷纤维的缺点,在前期工作的基础上,本文采用自制的拉伸设备,制备了PVDF纤维胚体,并在纤维的纵向表面涂镀一定长度、形状完全对称的导电层,制备了含金属芯PVDF仿生毛发传感器,用于风洞的气流测量。

图1 SMPF的结构
1 传感器设计与制备
传感器的结构如图1所示,一根金属丝位于SMPF的中心位置,外面包裹着厚度均匀的PVDF层,在纤维的纵向表面,涂镀一定长度、形状完全对称的两片导电胶层。纤维的制备过程为:首先称取适量的PVDF颗粒,经过脱水处理后,放入自制设备的料斗中,加热至180 ℃,呈现熔融状态;PVDF从料斗的小孔中和金属丝一起被挤压出来,制成SMPF胚体。在SMPF胚体的制备过程中,当熔融状的PVDF被挤出小孔,经过空气冷却后,迅速转化成固体状态,并继续被前方已凝结成固态的PVDF层拉伸至稳定状态,在此机械拉伸过程中,一部分β相转化成α相,增加了PVDF层的压电常数,增加了传感器的灵敏度。
在SMPF胚体的纵向表面,涂镀上形状完全对称的导电银浆后,放入90 ℃的硅油中进行极化,极化电路如图2(a)所示,中间金属丝用作一个电极,表面2片导电层连接成另一个电极。极化30 min后,随着硅油冷却至室温,取出洗净后,将表面两片导电层分别接出,就可以用作SMPF仿生毛发传感器了。纤维中经过极化的PVDF层,表面没有被电极覆盖的区域认为没有被极化,不具有压电性;表面有电极覆盖的区域被极化,具有压电性,极化方向为径向,如图2所示。传感电路如图2(b)所示。

图2 电路图
2 气流传感理论模型
仿照昆虫感觉毛的结构,将悬臂梁结构的SMPF放置于流场中,测量气流的大小和方向,其结构如图3所示。图3中l0为涂镀电极的长度,L为SMPF的长度。

图3 SMPF传感器模型
当SMPF受到气流冲击作用时,作用在SMPF表面的力可以等效为均布载荷,表示为:
(1)
式中:FD为SMPF单位长度上的载荷,U0为气流速度;R是SMPF的截面半径;ρair为空气的质量密度,在室温条件下,一般取1.21×103g/m3;CD为阻尼系数,具体数值和气流速度有关。在均布载荷作用下,SMPF的弯矩表示为:

(2)
式中:L为纤维总长;z为沿纤维长度方向坐标。
本文采用第1类压电方程建立传感器的理论模型,表达式为:
(3)
(4)

为了计算和公式的推导方便,本文使用圆柱坐标系建立模型的坐标系,其中z方向、θ方向和r方向分别对应压电方程中的1方向、2方向和3方向。由于SMPF的长度远大于直径(直径为0.3 mm,长度为30 mm左右),所以圆周方向与切向的应力可以忽略,即SMPF只有轴向(z方向)有应变,其余方向的应变均为0,而且SMPF在长度方向上可以自由伸缩。由此得到悬臂梁结构SMPF的应力和电场的边界条件为:
Srr=Sθθ=Srθ=Sθz=Srz=0
(5)
Dθ=Dz=0
(6)
Er=0
(7)
式中:θ为SMPF周向;r为SMPF径向;z为SMPF长度方向。
将式(5)~式(7)代入到式(3)和式(4)中,可以得到SMPF的电位移:

(8)
由于SMPF的长度远大于它的半径,所以当SMPF产生较小的弯曲变形时,可以认为各部分的曲率半径都相同,设为ρ,则:

(9)
式中:E表示整个纤维的弹性模量;I表示整个纤维的惯性矩;EI为纤维的抗弯刚度。
由此,得到SMPF表面电极R、θ处的应变为:

(10)
把式(10)代入式(8)得电位移:

(11)
SMPF纤维横截面上一片电极的表面电荷可以表示为:

(12)
式中:α为表面电极的覆盖角度。
把式(11)代入式(12),积分后可以得到:

(13)
因为气流吹来的方向与y轴成夹角γ(如图3(b)所示),考虑角度的影响,再将式(1)代入到式(13)中,可以得到:

(14)
式中:Q为在气流U0作用下,SMPF表面1片电极上产生的电荷值。由于SMPF的结构,两片表面电极都是完全对称布置的,因此,在另一片表面电极上,将产生极性相反,幅值相同的电荷。将这两片电极按照图2(b)所示的连接方式接入到传感电路中,则SMPF传感器的输出信号是Q的2倍。
从式(14)可以看出,在SMPF的基本尺寸(R、l0)、参数(EI)确定的情况下,并忽略阻尼系数的变化,传感器的输出电荷与SMPF的长度L成线性递增关系,与气流速度U0平方成线性递增的关系,与气流的作用角度γ成余弦关系。
3 气流冲击传感实验
3.1 实验平台搭建
为了验证理论分析的正确性,本文设计了气流冲击传感实验,实验装置如图4所示。主要有微型风洞测试仪、三杯式风速传感器、直流电源、电荷放大器、SPMF、工控机。实验时,把SMPF和三杯式风速传感器并排地放置在微型风洞测试仪中。SMPF输出的电信号先通过导线传输到电荷放大器中,经电荷放大器放大后,通过数据采集卡输入到工控机中。三杯式风速传感器输出的电信号,直接通过数据采集卡采集输入到工控机中。两组数据分别通过工控机中的Labview和Origin软件处理和分析。对数据进行带阻滤波(40 Hz~3 000 Hz)处理,进而得到最终的实验数据。
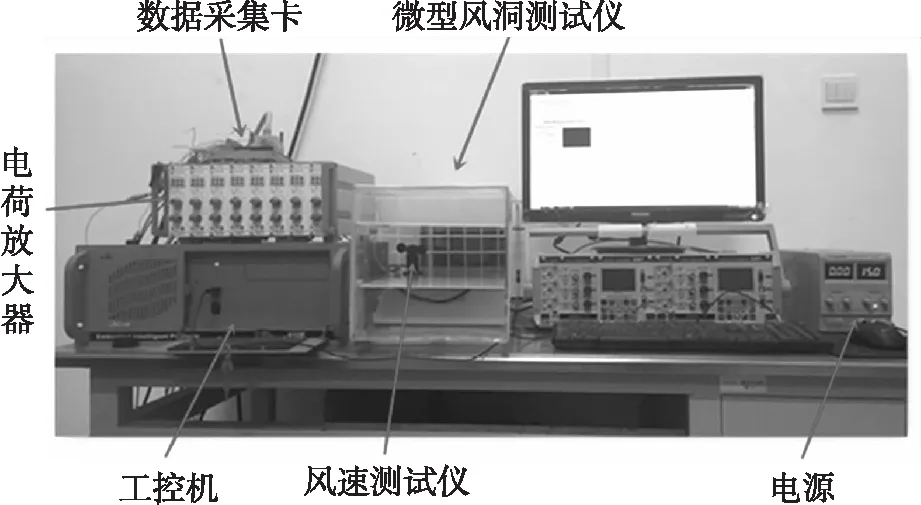
图4 实验装置
3.2 实验结果和结论分析
3.2.1 实验结果
实验过程中,首先将调节微型风洞的风速。风速稳定后,突然打开风洞的门,冲击气流冲击SMPF,使SMPF产生电荷信号,通过电荷放大器,转换成电压信号后,经过数据采集卡,输入到电脑中的Labview程序中。同时,将三杯式风速传感器的输出信号也经过数据采集卡,输入电脑中。图5是一次气流冲击过程中SMPF和三杯式风速传感器的完整输出信号。
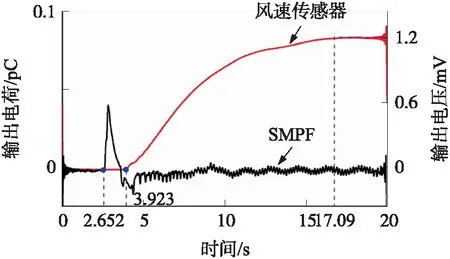
图5 一次气流冲击下,SMPF和风速传感器的输出信号
从图5可以看出,冲击气流同时作用在SMPF和三杯式风速传感器时,二者开始响应的开始时间不同。SMPF在2.652 s时,产生电荷信号,随后迅速增大到最大值后,又快速降低并逐渐趋于稳定状态。SMPF的感知过程是由压电材料的特性决定的,因此,压电类的传感器只能感知变化的激励信号。在本文的实验过程中,取每次冲击气流作用过程中,SMPF产生的电荷信号的峰值,作为气流传感信号。三杯式风速传感器在3.923 s时产生电信号,之后逐渐增大,在17.09 s后趋于稳定。产生这个时间差的主要原因是本文制备的SMPF具有直接的机电转换性能,而三杯式风速传感器自身存在的一些机械性能缺陷而导致的。在实验过程中,风速传感主要起到校准风速大小和对比的作用。
3.2.2 气流速度和传感信号的关系
为了测试SMPF对于气流速度的传感性能,选取长度为30 mm的SMPF进行气流传感实验,其中表面电极长度l0为1 mm,保持不变。每一组实验中,保持SMPF的长度不变,逐渐增大气流速度,每次增大1 m/s,气流速度分别为3 m/s、4 m/s、5 m/s、6 m/s、7 m/s、8 m/s、9 m/s、10 m/s。每做完一组实验后,将SMPF的长度L剪短,重新进行下一组实验。实验共进行了6组,其中SMPF的长度L依次为30 mm,25 mm,20 mm,15 mm,10 mm,5 mm。将实验结果以气流速度为横坐标,以SMPF的输出电荷,即传感信号为纵坐标,得出如图6所示的实验规律。

图6 相同长度条件下,SMPF输出信号和冲击气流速度关系
从图6可以看出,在长度不变的条件下,SMPF输出的电荷值(传感信号),随着气流速度的增加呈非线性递增的关系,这和式(14)中的结论相符,即Q值和气流速度U0的平方大约成线性关系。Q值和气流速度U0的平方之所以不是非常严格的线性关系,是由于阻尼系数CD的值随着气流速度U0的变化,呈现出非严格单调的变化关系,影响了Q值的变化。对不同长度的SMPF进行相同的实验,都可以得出同样的规律。


图7 SMPF输出信号的线性化
由图7可见,此时,传感器的输出-输入为线性关系,其中的理论输出采用最小二乘法拟合直线,由Origin软件自动完成。传感器的线性度、灵敏度、分辨率、重复性误差如表1所示。其中,传感器的线性度、灵敏度由图7经过计算得到,分辨率、重复性误差由图5所示的多次实验结果得到。

表1 SMPF气流传感器特性
3.2.3 SMPF长度和传感信号关系实验
为了测试SMPF长度L对传感信号的影响,选取长度为30 mm的SMPF进行实验,实验分为8组进行。每一组实验中,控制气流冲击速度大小不变,依次剪短SMPF,每次剪短5 mm,即本实验使用SMPF的长度依次为30 mm、25 mm、20 mm、15 mm、10 mm、5 mm。每做完一组实验,调节气流的速度进行下一组实验,气流的速度从3 m/s,以1 m/s的幅度逐渐增加到10 m/s。同样取每一次实验中SMPF产生的电荷信号峰值作为传感器信号,8组实验的结果如图8所示。
从图8可以看出在相同速度的气流冲击条件下,SMPF输出的电荷值都是随着SMPF长度的增加而呈现非线性递增关系。在不同速度的气流作用下,都可以得出同样的规律。同时从图8还可以看出,随着气流速度的增大,SMPF输出的信号也增大。实验结果验证了式(14)的理论模型。

图8 相同气流冲击条件下,SMPF输出信号和自身长度关系
3.2.4 SMPF的方向性传感实验
在上面的实验系统之上,进行SMPF的方向性传感实验。每次实验中气流的速度都为5 m/s。每次实验开始时,旋转SMPF的角度,以改变气流的作用角度γ,旋转幅度为15°/次。对采集到的实验数据进行分析、处理,做出SMPF输出信号和角度γ的关系图,如图9所示,横坐标为SMPF转动的角度,纵坐标为SMPF在不同气流冲击角度下输出的电荷值。从图中可以很好地看出,随着SMPF转动角度的变化,SMPF输出的电荷值Q与转动角度γ呈余弦的变化关系。实验数据与理论分析数据相吻合,验证式(14)的正确性,故SMPF可以判断冲击气流的冲击方向。
图9 MPF输出信号和气流角度γ的关系
同样,在极坐标下对实验数据进行处理,得出如图10所示的“8”字图。从图10可以看出,在不同的角度下SMPF输出的电荷值是不同的,即SMPF输出的电荷值是随着角度的转动而变化的。

图10 极坐标下,SMPF输出信号和气流角度γ的关系
4 结论
本文将设计制备的SMPF用作气流传感器,感知冲击气流的速度和方向。首先,采用挤压拉伸的方法制备了纤维胚体,经过涂镀表面电极、极化、电极封装等工艺后,成功制备了SMPF传感器。采用第1类压电方程和材料力学理论,建立的悬臂梁结构SMPF气流传感器的理论模型。搭建了实验系统,测试了SMPF的气流传感器性能。结果表明,SMPF传感信号和气流速度成平方关系,和纤维长度成非线性递增关系,和气流作用角度成余弦关系。实验结果验证了理论模型。本文设计制备的SMPF气流传感器有着较为广泛的工程应用前景,有望应用于空间狭窄、要求传感器体积较小,并能大规模布置的工程领域。
[1] Avitabile D,Homer M,Champneys A R,et al. Mathematical Modelling of the Active Hearing Process in Mosquitoes[J]. Journal of the Royal Society Interface,2009,7(42):105-122.
[2] Landolfa M A,Miller J P. Stimulus-Response Properties of Cricket Cereal Filiform Receptors[J]. Journal of Comparative Physiology A,1995,177(6):749-757.
[3] Cokl A,Doberlet M V. Communication with Substrate-Borne Signals in Small Plant-Dwelling Insects[J]. Annual Review of Entomology,2003,48:29-50.
[4] Van Dyck M,De Mey F,Peremans H. A Computational Study of Biomimetic Mechanosensor Array Processing for Air Flow Sensing[C]//IEEE International Symposium on Intelligent Signal Processing. IEEE,2007:1-6.
[5] Yang Y,Klein A,Bleckmann H,et al. Artificial Lateral Line Canal for Hydrodynamic Detection[J]. Applied Physics Letters,2011,99(99):023701-023701-3.
[6] Ahmad T Abdulsadda,Xiaobo Tan. An Artificial Lateral Line System Using IPMC Sensor Arrays[J]. International Journal of Smart and Nano Materials,2012,3(3):226-242.
[7] Goodwyn P P,Katsumata-Wada A,Okada K. Morphology and Neurophysiology of Tarsal Vibration Receptors in the Water Strider Aquarius Paludum(Heteroptera:Gerridae)[J]. Journal of Insect Physiology,2009,55(9):855-861.
[8] Huerta R,Nowotny T. Fast and Robust Learning by Reinforcement Signals:Explorations in the Insect Brain[J]. Neural Computation,2009,21(8):2123-2151.
[9] Tao J,Yu X. Hair Flow Sensors:from Bio-Inspiration to Bio-Mimicking—A Review[J]. Smart Materials and Structures. 2012,21(11):113001.
[10] Fan Z F,Chen J,Zou J,el al. Design and Fabrication of Arificial Lateral Line Flow Sensors[J]. Journal of Micromechanics and Microengineering,2002,12:655-661.
[11] Jung I,Roh Y. Design and Fabrication of Piezoceramic Bimorph Vibration Sensors[J]. Sensors and Actuators A:Physical,1998,69:259-266.
[12] 边义祥,裘进浩. 半电极含金属芯压电纤维的动态微力传感器[J]. 传感技术学报,2011,24(10):1391-1395.
[13] 夏咸龙,周桂祥,边义祥,等. 表面部分电极含金属芯压电纤维气流传感特性研究[J]. 传感技术学报,2016,29(2):195-201.

边义祥(1973-),男,汉族,扬州大学机械工程学院副教授,博士,研究方向为仿生传感器、生物感知机理,yxbian@yzu.edu.cn;

张弋(1989-),男,汉族,扬州大学硕士研究生,研究方向为仿生传感器,540983993@qq.com。
ABionicSensoryHairforAirflowSensor*
BIANYixiang*,ZHANGYi,HECan,SUNKaixuan,LIURongrong
(College of Mechanical Engineering,YangZhou University,Yangzhou Jiangsu 225127,China)
Imitation of insect hair senses the structure of hair,a symmetric-electrodes metal core PVDF fiber(SMPF)airflow sensor was designed and fabricated. A SMPF embryo was successfully prepared using self-made drawn fiber equipment. After coated symmetrical electrodes on the surface,high temperature polarization,electrode packaging and other processes,a SMPF air flow sensor was successful fabricated. Based on the first type of piezoelectric equation and fluid mechanics theory,the SMPF airflow sensor model of cantilever structure is established. The SMPF of the cantilever structure is placed in the air flow field and the impact airflow test is carried out. The experimental results show that the output signal of SMPF air flow sensor has a nonlinear relationship with the fiber length,which is in square relationship with the velocity of air flow and the“8”shape relationship with the direction of airflow. The experimental results verify the theoretical model. It is shown that the SMPF sensor can sense the speed and direction of the airflow and has a wide range of engineering application prospects.
airflow sensor;bionic sensor;piezoelectric equations;PVDF fiber;surface symmetrical electrodes
TM282
A
1004-1699(2017)11-1647-06
项目来源:国家自然科学基金项目(51275447,51775483);江苏省研究生实践创新计划项目(SJLX16_0589)
2017-04-24修改日期2017-08-15
10.3969/j.issn.1004-1699.2017.11.006
