基于模糊控制的雷达红外双传感器有轨电车防撞系统*
2017-12-08赵振翔旷文珍
赵振翔, 旷文珍
(1.兰州交通大学 光电技术与智能控制教育部重点实验室,甘肃 兰州 730070;2.兰州交通大学 自动化与电气工程学院,甘肃 兰州 730070)
基于模糊控制的雷达红外双传感器有轨电车防撞系统*
赵振翔1, 旷文珍2
(1.兰州交通大学光电技术与智能控制教育部重点实验室,甘肃兰州730070;2.兰州交通大学自动化与电气工程学院,甘肃兰州730070)
有轨电车与行人车辆的共享路权使得防撞系统成为行车安全的一个关键环节。采用2套传感器对测量向量异步数据融合并在显示端设置三级声光报警保证障碍检测的可靠性和安全性。在控制器部分,从安全性和舒适性2方面设计了两种模糊控制规则比较输出,保证行车安全的基础上提高了电车制动时的舒适度评价。仿真结果表明:较好地实现了有轨电车的制动要求。
异步数据融合; 列车防撞系统; 模糊控制; 系统仿真
0 引 言
有轨电车(tram)车辆技术成熟于19世纪,其与机动车以及行人共享路权,对行车安全产生重大挑战[1]。仅仅依靠司机的判断,不能满足高安全性行车要求,一旦司机疏忽或未及时对前方障碍物作出反应,将会造成重大的交通事故。传统的列车防撞分为被动防撞和主动防撞2类,被动防撞技术,如欧盟国际铁路的SAFETRAM项目[2],其延长了撞击缓冲时间,但不能对事故提前预判。目前,国内外对于有轨电车主动防撞技术的研究主要借鉴了航运和高速铁路的先进经验[3],有轨电车通过全球定位系统(global positioning system,GPS)定位,毫米波雷达等设备实时的监测行驶中的障碍物的异常情况。其中上海通号研究中心在其设计的有轨电车避障系统中利用了车载前置雷达子系统对列车行使前方进行短距离扫描,监测是否有障碍物。德国Bosch公司于2014年基于其在无人驾驶汽车领域的经验开--------------------------------------------------
发了有轨电车声光报警防撞系统,通过摄像头和雷达采集信息,在前方行人或车辆距离小于危险距离时发出声光报警。目前使用的有轨电车主动防撞系统主要存在2个不足:1)采用雷达传感器或前置摄像头,其检测角度有限,尤其在弯道行驶时无法检测前方车辆[4];2)上述新型的有轨电车防撞技术能在前方障碍物处于危险距离时对司机发出提醒,但未较好地与有轨电车自动tram保护(automatic tram protection,ATP)系统结合,在司机不能及时反应时自行制动。
由于传统的有轨电车防撞系统传感器单一导致障碍识别存在误报情况,本文提出了一种基于毫米波雷达和无源红外的双传感器异步数据融合的有轨电车防撞系统,利用红外传感器较广的测量角弥补传统雷达、摄像头测量角度的不足[5]。
1 有轨电车防撞系统设计
系统包括毫米波雷达、无源红外接收器、障碍物识别模块、路况信息显示模块、声光三级报警模块、模糊控制器、列车制动模块。系统结构如图1所示。利用毫米波雷达与无源红外接收器在空间和频率上的互补[6],通过优化性准则产生对障碍一致性描述,进而提高系统判断的准确性。数据融合分为集中式、分散式、混合式和反馈式[7,8]。本文选择集中式系统,其具有融合精确度高,信息损失小的特点。
基于红外雷达的融合方法在球坐标下定义雷达的坐标(tm(t),θm(t),φm(t)),直角坐标下障碍物t时刻的坐标值为(x(t),y(t),z(t))。
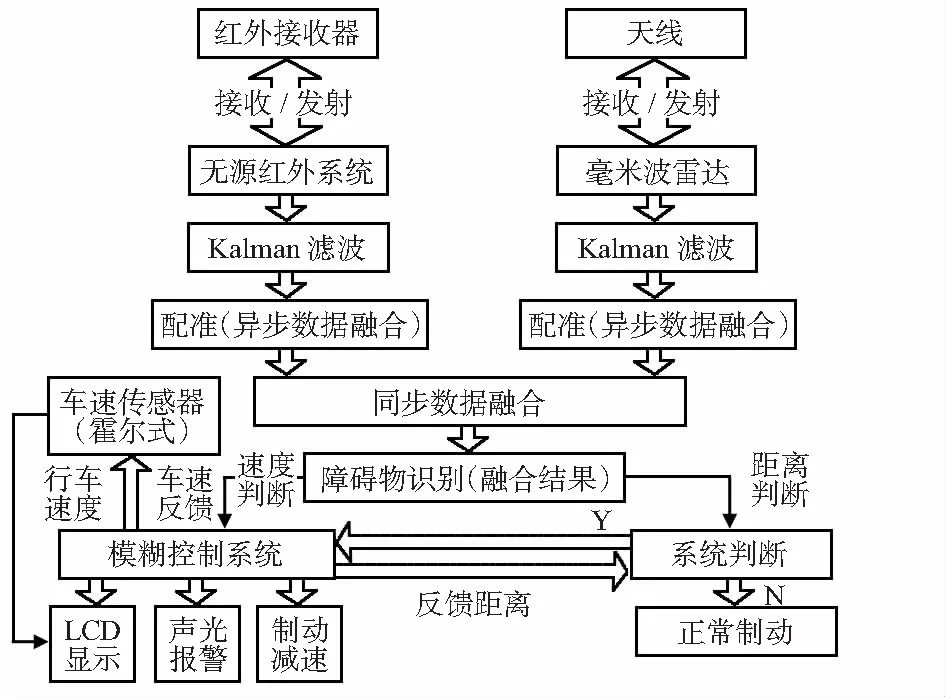
图1 有轨电车防撞系统结构
考虑到无源红外传感器与毫米波雷达测量时序T的不同步性[9],设两者采样周期分别为Tr和Tm,Tm/Tr=p。对于毫米波雷达Zm(t)为测量向量
Zm(t)=(rm(t),θm(t),φm(t))T
(1)
用普通最小二乘法(ordinary last square,OLS)法[10]对2个测量值进行异步对准,融合后的T时刻毫米波雷达测量值为
(2)
方差为
(3)
融合后的T时刻无源红外测量值为
(4)
方差为
(5)
利用加权平均法对2个测量值进行同步加权融合,拉格朗日乘法求解权系数最优分配后[11],得到方位角和俯仰角的测量值、白噪声的方差为
(6)
(7)
国内现行的100 %低地板有轨电车主要车型车辆底盘与地面距离约为40 cm左右[12],对于融合后的测量值(rL(t),θL(t),φL(t))在rL(t)cosθ>40 cm时,障碍物高度已不可忽略。
2 有轨电车安全距离计算
有轨电车制动过程分为:驾驶员反应阶段、制动力增长阶段和持续制动阶段3个过程[13]:
1)前方车辆、行人静止或为静态障碍物时(沿轨道方向速度为0 km/h即视为静止)车辆主动安全预警间距为

(8)
车辆主动安全自动制动间距为
(9)


(10)
车辆的主动安全预警距离为

(11)
车辆主动安全自动制动间距为
(12)
3)当自车制动时本车的制动距离为
(13)
车辆的主动安全预警距离为
(14)
车辆主动安全自动制动距离为
(15)
式中v1为本车车速;v2为前车车速;ΔV为相对车速;a1为本车制动减速度;a2为前车制动减速度;S1为本车的制动距离;d0为最终安全车间距;d1为自动制动间距;d为报警时实际车间距;t1为轨电车驾驶员反应时间,s;t2为制动减速增长时间,s。
3 模糊控制规则
经过融合的数据由模糊控制器输出控制,有轨电车减速、报警或停车的模糊控制中考虑到单一控制规则的安全性、可靠性、乘客承受能力(舒适度)以及停车精度等需求[14],运用2套控制规则分别输出控制量再进行对比,以保证对于电车控制量的可靠性,控制过程如图2所示。其中ΔD为本车与障碍物的距离,a为本车加速度,Δa为本车的加速度变化率。
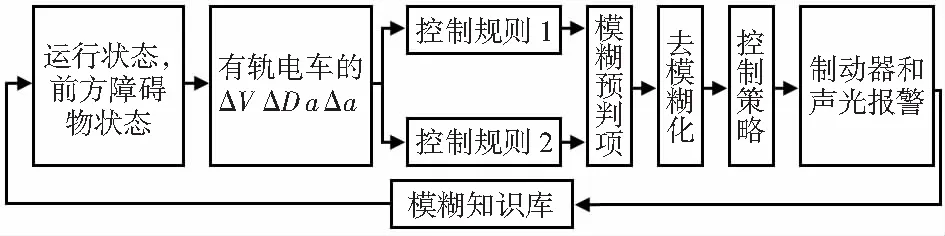
图2 有轨电车制动时的模糊控制原理
根据2015年长春公共交通集团电车公司对有轨电车制动安全距离于锦阳路至南阳路路段的定点测试,如表1所示。
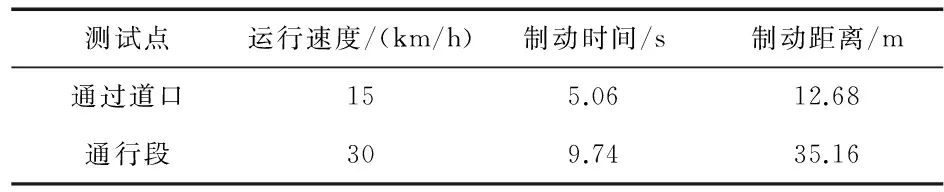
表1 有轨电车制动测试
有轨电车自动制动时,应当在制动距离充足的情况下,保证加速度a尽可能小。有轨电车乘客对于列车加速度和加速度变化率的容忍度如表2所示[14]。
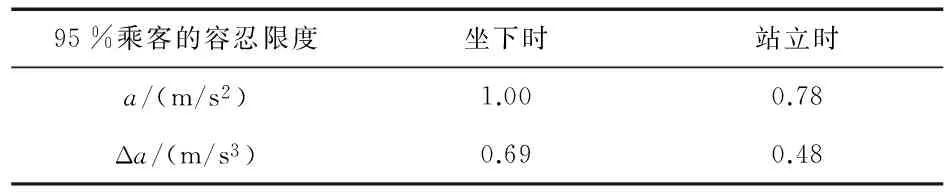
表2 大部分乘客(95 %)对列车加速度和加速度变化率的容忍度
控制规则一:考虑到有轨电车普遍的运行速度在15~60 km/h,选取ΔD=[0,350]为相对距离参考论域,ΔV=[-60,60]为相对速度的参考论域,其中,ΔD为本车与障碍物的相对距离,ΔV为本车与障碍物的相对速度。在新的论域[-5,5],以量化因子Kv=5/60,将ΔV模糊化为A={负大(NB),负中(NM),负小(NS),零(ZO),正小(PS),正中(PM),正大(PB)},选取三角波函数和模糊熵作为度量,采用最小隶属度法构造描述速度误差的隶属函数μ(ΔV),建立如下模型[14]

(16)
求解上述最优模型,得隶属函数如图3所示。

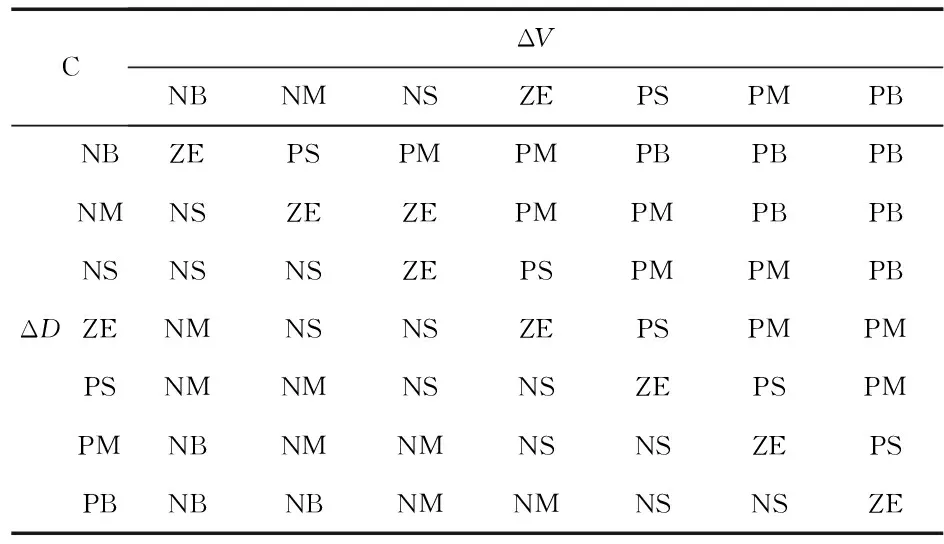
表3 相对速度与距离的模糊控制规则
控制规则二:鉴于国内有轨电车的平稳性评价指标没有形成统一的规则,本文参考铁道车辆动力学性能评定和试验鉴定规则 GB5599—1985[14],通过对速度采集一定的时间和段数将W作为平稳性等级[15],取有轨电车安全运行的最大舒适加速ac=max(astand,asit)=0.78 m/s2,最大安全加速度取as=1 m/s2;最大舒适加速度变化Δac=max(astand,asit)=0.48 m/s3,最大安全加速度变化取Δas=0.6 m/s3,设定电车制动时的舒适性评价函数为:μc(a,Δa)=0.7μc(a)+0.3μc(Δa)。
采样频率设定为500 ms,模糊预判项对上述两控制规则的输出进行预判比对,选择更接近理想值的控制测量,在安全性要求上选择平稳性评价指标较大的输出值,同时考虑有轨电车停车精度的要求,制动力在乘客容忍限度内不能过小。对于不安全行驶时的报警采取声光三级预警模型,视有轨电车与目标障碍物的相对距离预警设备做出不同的安全反应,三级预警模型如图4所示。
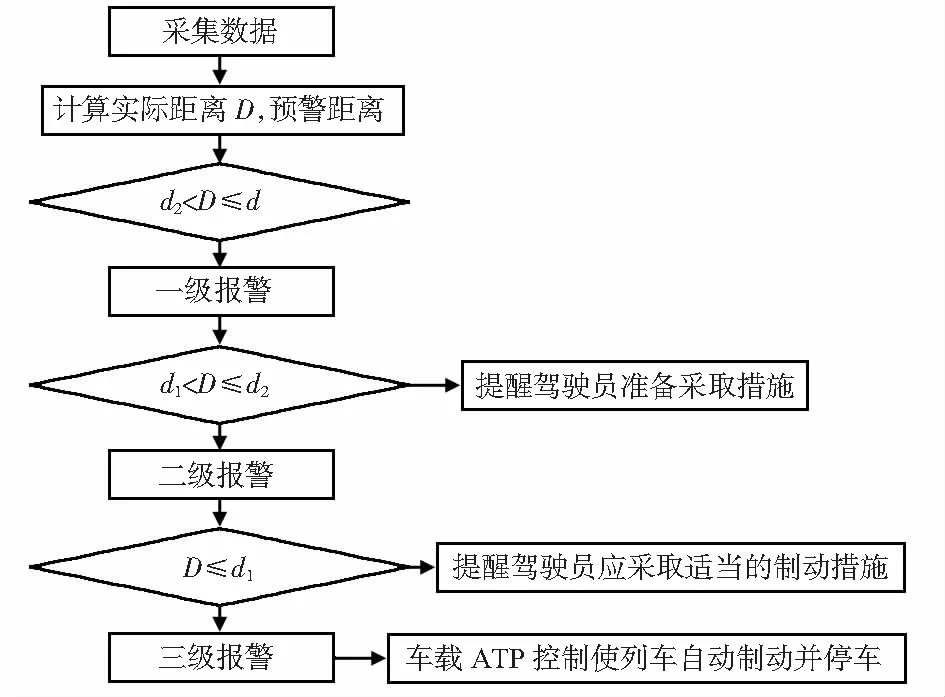
图4 声光三级预警系统总控制流程
4 仿真结果
利用Matlab对景区的一段有轨电车跟车行驶进行仿真,模拟景区仿真路线的参数:线路总长度为8.32 km,最高限速为60 km/h,正常运行速度为30 km/h,路段运行时长为约16.64 min,通过道口速度为15 km/h。
根据以上设定道路参数和列车运行状况,基于前模糊控制策略,对比后输出并且用Matlab分别对通过段时的电车运行时速30 km/h和通过道口时15 km/h结果进行仿真,仿真周期设定为0.5 s,并且设定在t=2.5 s时列车遇到障碍物,有轨电车以600 kPa的制动压力进行制动,直到列车完全停止。仿真结果如图5所示。
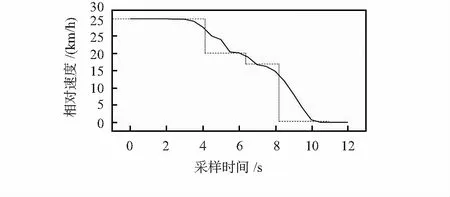
(a) 电车30 km/h行驶
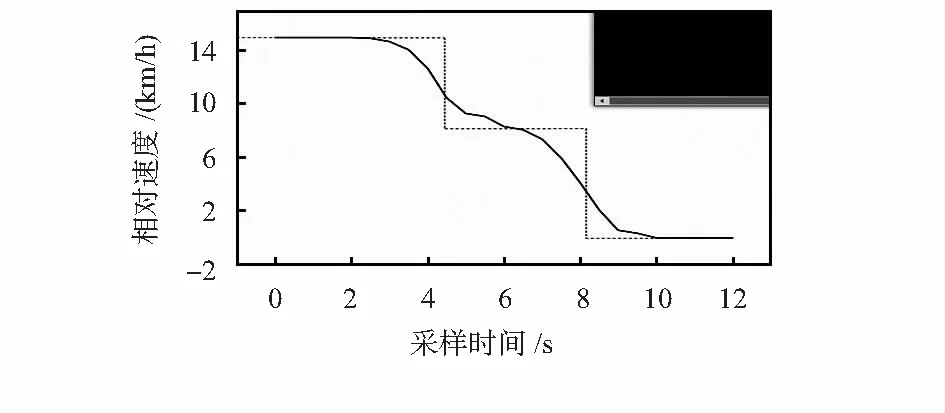
(b) 电车15 km/h行驶图5 制动结果
以30 km/h行驶的电车(通过段)制动时间为9. 5ms,以15 km/h行驶的电车(通过段)制动时间为7. 5ms,从结果可以看出:电车制动速度下降过程中根据行驶速度的不同采取多次制动而不是紧急空气制动。从制动次数上看,电车行驶速度越高制动次数越多,跟随精度也更强,舒适性更强,模糊策略的优势更加明显。列车在30 km/h运行时模糊控制采用了3次制动,制动时间误差为9 740-9 500=240 ms,停泊精度约为±20 cm,基本满足普通有轨电车准确停泊的要求。
5 结束语
本文针对有轨电车设计了基于双传感器异步数据融合的模糊控制系统,对无源红外和雷达的异步滤波和数据融合,利用毫米雷达与无源红外优势互补。分别制定了2套基于行车安全和舒适性的模糊控制规则和评判函数,根据实际运行状况采用多次制动。在预警装置上使用三级声光报警和液晶显示器(liquid crystal display,LCD)保障行车安全,仿真实验表明模糊控制在有轨电车防撞中有较好的效果。
[1] Teschke K,Frendo T,Shen H,et al.Bicycling crash circumstances vary by route type:A cross-sectional analysis[J].BMC Public Health,2014,14(1):1205-1205.
[2] Zhou Hechao,Wang Wenbin,Hecht Markus.Three-dimensional derailment analysis of a crashed city tram[J].Vehicle System Dynamics,2013,51(8):821-823.
[3] Nguyen M D,Nguyen V T,Tamaru H.Automatic collision avoiding support system for ships in congested waters and at open sea[C]∥International Conference on Control,Automation and Information Sciences,2012:96-101.
[4] 高 军,董 昱,王 晶.新型有轨电车自动防护系统的研究[J].科学技术与工程,2014,14(3):246-250.
[5] Katz R,Schulz R.Towards the development of a laser scanner-based collision avoidance system for trams[C]∥Intelligent Vehicles Symposium,IEEE,2013:725-729.
[6] Quaranta C.Technique for radar and infrared search and track data fusion[J].Optical Engineering,2013,52(4):602.
[7] 黄漫国, 樊尚春, 郑德智,等. 多传感器数据融合技术研究进展[J]. 传感器与微系统, 2010, 29(3):5-8.
[8] 吕漫丽,孙灵芳.多传感器信息融合技术[J]. 自动化技术与应用,2008,27(2):79-81.
[9] 王 洁,韩崇昭,李晓榕.异步多传感器数据融合[J].控制与决策,2001,16(6):877-881.
[10] 李 冰,黄伟平,冯德玉,等.一种异类传感器的异步数据融合算法[J].计算机仿真,2010,27(3):5-7.
[11] 凌林本,陈超英.多传感器数据融合时权的最优分配原则[J].中国惯性技术学报,2000,8(2):36-39.
[12] 沈训梁,陆 云,李 俊,等.100 %低地板有轨电车及其转向架发展现状[J]. 都市快轨交通,2013,26(5):21-24.
[13] Niittymäki J,Sane K J.The tram simulation in Helsinki—A new research method[C]∥Applications of Advanced Technologies in Transportation Engineering,2010:76-80.
[14] GB 5599—1985.铁道车辆动力学性能评定和试验鉴定规范[S].
[15] 王海涌,王晓明,党建武.基于模糊约简的高速列车舒适性综合评价[J].铁道学报,2010,32(5):98-102.
Collisionavoidsystemfortramwithradarandinfraredsensorsbasedonfuzzycontrol*
ZHAO Zhen-xiang1, KUANG Wen-zhen2
(1.KeyLaboratoryofOpto-electronicTechnologyandIntelligentControlofMinistryofEducation,LanzhouJiaotongUniversity,Lanzhou730070,China;2.SchoolofAutomatic&ElectricalEngineering,LanzhouJiaotongUniversity,Lanzhou730070,China)
Sharing the right of way with tram and pedestrians leads the collision system becoming the vital part of tram.Two sets of asynchronous sensors are fused,three-grade sound and light alarm are set on show end to insure the safety and reliability of obstacle detection.In order to improve the comfort evaluation index as well as safety index in driving.In controller part,design two sets of fuzzy control rules and compare output.Control result is simulated and simulation result shows that fuzzy control meets the basic needs of tram braking intensely well.
asynchronous data fusion; tram collision avoid system;fuzzy control; system simulation
10.13873/J.1000—9787(2017)12—0108—04
TP 273
A
1000—9787(2017)12—0108—04
2017—01—09
甘肃省青年科学基金资助项目(148RJZA043)
赵振翔(1992-),男,硕士研究生,主要研究方向为控制理论与控制工程。
