基于龙伯格扰动观测器的永磁同步电机PWM电流预测控制*
2017-12-05储建华魏海峰
薛 峰, 储建华,2, 魏海峰,2
(1. 莱克电气股份有限公司, 江苏 苏州 215009;2. 东南大学 电气工程学院,江苏 南京 211189)
基于龙伯格扰动观测器的永磁同步电机PWM电流预测控制*
薛 峰1, 储建华1,2, 魏海峰1,2
(1. 莱克电气股份有限公司, 江苏 苏州 215009;2. 东南大学 电气工程学院,江苏 南京 211189)
针对传统永磁同步电机(PMSM)PWM电流预测控制中电机参数扰动造成的电流静差及振荡问题,提出基于龙伯格(Luenberger)观测器的PWM电流预测控制。首先,将系统参数扰动引入到电机电压方程,构建在参数扰动中拥有优良性能的Luenberger观测器来观测系统扰动。其次,离散化Luenberger扰动观测器,通过极点配置分析系统稳定性。最后,将观测器估计系统扰动引入含参数扰动项的电压方程中,为PWM电流预测控制算法提供实时性扰动补偿。仿真结果表明,所提算法能够快速无静差地观测出系统扰动,有效避免参数扰动造成的电流静差及振荡问题,提高电流预测算法的鲁棒性。
永磁同步电机; PWM电流预测控制;龙伯格观测器;扰动补偿
0 引 言
交流伺服系统中,电流环决定了系统的暂态和稳态性能,构造一个稳定性高、动态性能良好且控制精度高的电流环成为高性能伺服控制的关键,因此,具有优良暂态性的电流预测控制成为伺服控制的研究热点。电流预测控制精度依赖准确模型参数,预测过程须对参数扰动进行充分考虑。
由于PWM预测算法具有良好的电流动态性能,所以众多国内外学者致力于改进传统的PWM预测算法,通过结合扰动观测[1-3]、鲁棒控制[4-5]、模型参考自适应[6]等方法将PWM预测控制引入电流预测控制中,加强对参数扰动的鲁棒性。文献[1]基于无差拍思想推出预测方程,用龙伯格(Luenberger)观测器观测的电流构造鲁棒预测电流控制算法。文献[2-3]将扰动观测方法引入电机电流预测中,补偿参数误差引起电流预测误差。文献[4]通过引入两个电流权系数,使系统在模型参数不准确时依然能保持大范围稳定。文献[5]在文献[4]鲁棒性算法的基础上,利用电流误差在线调节磁链参数以及增加积分环节以消除dq轴电流静差。文献[7]对传统预测电流控制进行延伸,不仅降低了电流纹波,也提高了系统对参数不确定性的鲁棒性。文献[8-9]提出了一种基于电流差分检测技术驱动系统,只利用定子电流以及对应于不同开关状态的逆变器的电流差异,提高电流跟踪性能。文献[10]结合广义预测控制理论和扩展状态观测器提出新型转速跟踪控制方法,通过对扰动量的补偿,提高了鲁棒性。
针对传统PWM电流预测控制存在的由电机参数扰动造成的电流静差及振荡问题,构建Luenberger观测控制系统扰动,对系统扰动进行实时补偿。仿真结果验证了基于Luenberger扰动观测器的PWM电流预测控制算法的有效性:观测器能够快速无静差地观测出系统扰动,为鲁棒性预测算法提供实时补偿,有效避免了参数扰动造成的电流静差及振荡问题。
1 Luenberger扰动观测器的设计
转子磁场定向dq坐标系中,永磁同步电机(PMSM)电压方程为
式中:ud、uq,id、iq——定子电压矢量和电流矢量在dq轴上的分量;
R——定子电阻;
ωe——电角速度;
ψf——转子永磁体磁链;
Ld、Lq——dq轴电感,对于表贴式电机来说,有Ld=Lq=L。
实际系统运行时,电机参数会随着运行时间及工况变化而发生扰动,考虑系统参数扰动项,式(1)电压方程变为
式中:R0、L0、ψf0——电机铭牌标称参数;
ΔR、ΔL、Δψf——系统参数扰动。
针对式(2),提取dq轴电压方程上的参数扰动项:
式中:fd、fq——dq轴系统扰动;
Td、Tq——dq轴噪声干扰。
将式(3)代入式(2),得到含有系统扰动的电压方程为

其中:
相应地,构建Luenberger扰动观测器为

k1、k2——观测器增益,其取值大小影响系统稳定性。
对式(6)Luenberger扰动观测器进行离散化:
其中:E=
根据式(7),离散Luenberger扰动观测器结构图如图1所示。

图1 离散Luenberger扰动观测器结构图
2 系统稳定性分析
重新整理式(7),得到
其中:E1=
考虑到采样时间Ts足够小,认为TsR/L0=0,并且Tsωe=0,系统状态观测器特征方程为
|λI-E1|=-[λ2+(k1-2)λ+
求解特征方程,得到观测器极点为
根据系统稳定性条件,当观测器极点均分布于z域单位圆内时,系统稳定。由此推得观测器增益取值范围如下:
考虑系统响应快速性以及噪声敏感性,经过MATLAB多次仿真试验,最终k1取值为1.5,k2取值为-40。
3 基于Luenberger观测器的电流预测控制
将上述Luenberger扰动观测器观测出的dq轴系统扰动引入含参数扰动的电压方程式(4)中,对其离散化,得到基于Luenberger扰动观测器的PWM电流预测控制算法:
基于Luenberger扰动观测器的鲁棒PWM电流预测控制算法框图如图2所示。速度环采用传统的PI控制,电流环采用本文提出的基于Luenberger观测器的电流预测控制算法,系统运行过程中Luenberger观测器可实时观测电机参数扰动造成的系统扰动fd、fq,为PWM电流预测控制算法提供实时性扰动补偿,避免参数扰动造成的电流静差及振荡问题。
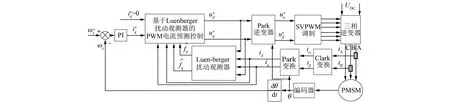
图2 基于Luenberger扰动观测器的鲁棒PWM电流预测控制算法框图
4 算法仿真分析
为验证本文提出的基于PWM电流预测控制算法的有效性,采用MATLAB/Simulink进行仿真。电机模型参数如下:额定转速nN=3 000 r/min,定子电感L=6.35 mH,定子电阻R=2.2 Ω,输出额定转矩TN=2.39 N·m,额定电流IN=10 A,永磁体磁链ψf=0.09 Wb,极对数p=4,采样频率设置为10 Hz。

图3 电感扰动对dq轴电流的影响以及扰动观测
(2) 算法给定2L电感值,图4为基于传统PWM电流预测控制算法下的相电流及FFT频谱分析,图5为基于Luenberger观测器下的PWM电流预测控制算法下的相电流及频谱分析。由图4、图5可明显看出基于Luenberger观测器电流预测控制下的相电流正弦度较传统预测算法较好,谐波含量低,Luenberger扰动观测增强了系统鲁棒性。
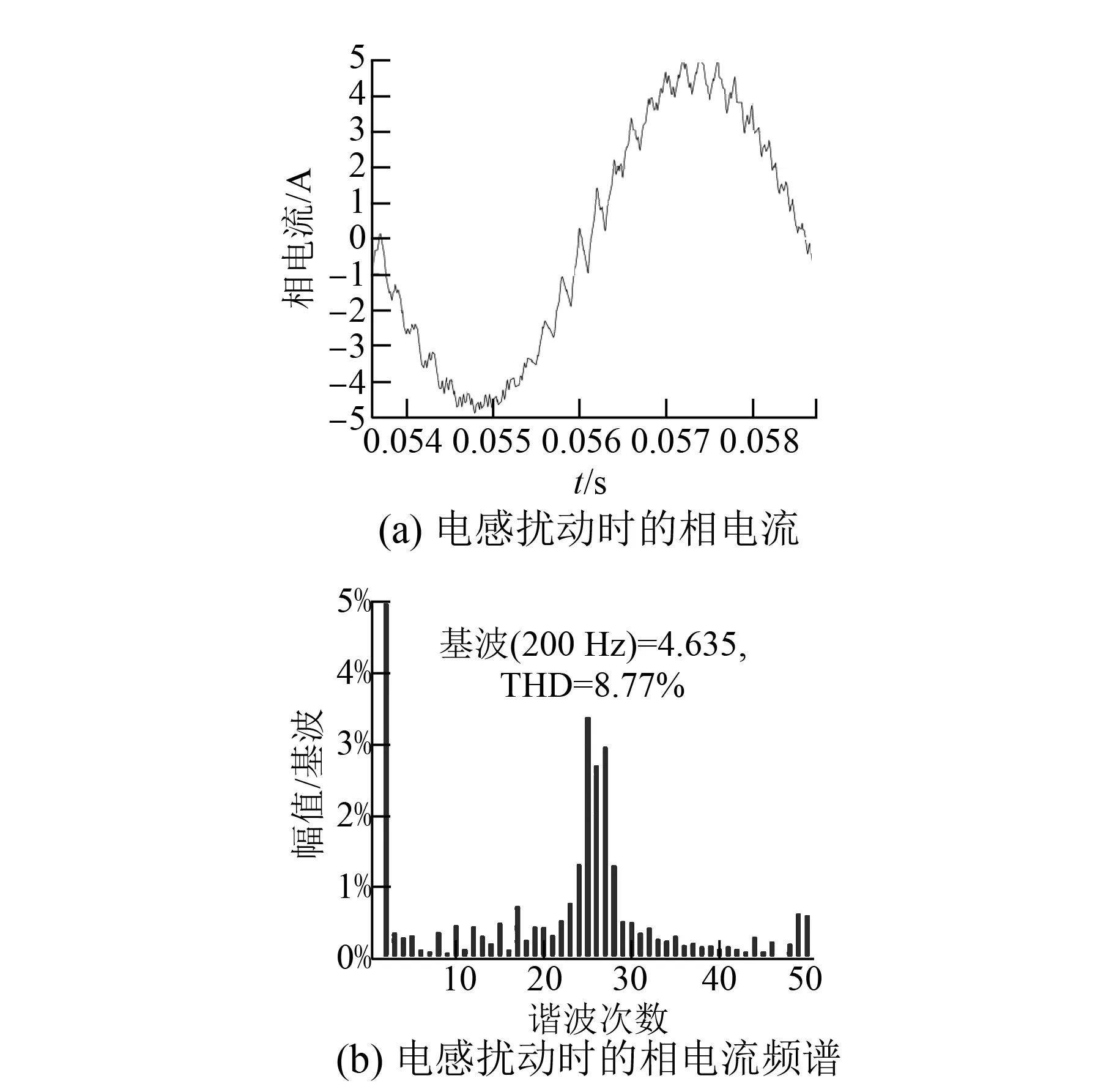
图4 传统PWM电流预测控制算法下的相电流及频谱

图5 新型PWM电流预测控制算法下的相电流及频谱
5 结 语
本文提出一种基于Luenberger扰动观测器的永磁同步电机PWM电流预测控制算法,通过Luenberger扰动观测器对电机运行过程中的系统扰动进行实时性补偿。仿真结果表明,本文提出的新型PWM电流预测控制算法对于电机参数扰动具有较宽的容忍度,能够快速无静差地观测出系统扰动,为鲁棒性预测算法提供实时补偿,避免参数扰动造成的电流静差以及振荡问题。
[1] 牛里,杨明,王庚,等.基于无差拍控制的永磁同步电机鲁棒电流控制算法研究[J].中国电机工程学报,2013,33(15): 78-85.
[2] MOHAMED Y A R I, ELSAADANY E F. Robust high bandwidth discrete-time predictive current control with predictive internal model—a unified approach for voltage-source PWM converters[J].IEEE Transactions on Power Electronics,2008,23(1): 126-136.
[3] XIA C,C,WANG M,SONGO Z,et al. Robust model predictive current control of three-phase voltage source PWM rectifier with online disturbance observation[J].IEEE Transactions on Industrial Informatics,2012,8(3):459-471.
[4] 牛里,杨明,刘可述,等.永磁同步电机电流预测控制算法[J].中国电机工程学报,2012,32(6):131-137.
[5] 王庚,杨明,牛里,等.永磁同步电机电流预测控制电流静差消除算法[J].中国电机工程学报,2015,35(10):2544-2551.
[6]WANGW,XIAOX,DINGY.AnadaptiveincrementalpredictivecurrentcontrolmethodofPMSM[C]∥PowerElectronicsandApplications(EPE), 2013 15thEuropeanConferenceonIEEE,2013: 1-8.
[7]SIAMIM,KHABURIDA,ABBASZADEHA,etal.Robustnessimprovementofpredictivecurrentcontrolusingpredictionerrorcorrectionforpermanent-magnetsynchronousmachines[J].IEEETransactionsonIndustrialElectronics,2016,63(6): 3458-3466.
[8]LINCK,LIUTH,FULC,etal.Model-freepredictivecurrentcontrolforinteriorpermanent-magnetsynchronousmotordrivesbasedoncurrentdifferencedetectiontechnique[J].IEEETransactionsonIndustrialElectronics,2014,61(2): 667-681.
[9]LINCK,LAIYS,YUHC,etal.Simplifiedmodel-freepredictivecurrentcontrolforinteriorpermanentmagnetsynchronousmotors[J].ElectronicsLetters,2016,52(1): 49-50.
[10] 刘旭东,李珂,孙静,等.基于广义预测控制和扩展状态观测器的永磁同步电机控制[J].控制理论与应用,2015,32(12): 1613-1619.
PWMPredictiveCurrentControlofPermanentMagnetSynchronousMotorBasedonLuenbergerDisturbanceObserver*
XUEFeng1,CHUJianhua1,2,WEIHaifeng1,2
(1. KingClean Electric Co., Ltd., Suzhou 215009, China;2. School of Electrical Engineering, Southeast University, Nanjing 211189, China)
Since motor parameter disturbance could cause current static error and oscillation in PWM predictive current control of permanent magnet synchronous motor (PMSM), PWM predictive current control based on Luenberger observer was proposed. Firstly, system parameter disturbance was introduced into the motor voltage equation, and Luenberger observer with excellent performance in parameter perturbation was constructed to observe the system disturbance. Then, Luenberger disturbance observer was discretized, and system stability was analyzed by pole assignment. Finally, disturbance from the observer was introduced into the voltage equation with parameter disturbance to provide real-time disturbance compensation for the algorithm. Simulation results showed that the proposed algorithm could rapidly observe the disturbance of the system without static error, effectively avoid the current static error and oscillation caused by inductance parameter error, and improved the robustness of current prediction algorithm.
permanentmagnetsynchronousmotor(PMSM);PWMpredictivecurrentcontrol;Luenbergerobserver;disturbancecompensation
国家自然科学基金项目(61503161);江苏省自然科学基金面上项目(BK20161229);江苏省产学研前瞻性联合研究项目(BY2016073-01)
薛 峰(1967—),男,工程师,研究方向为微特电机技术。储建华(1982—),男,博士,副研究员,研究方向为微特电机与伺服控制技术。魏海峰(1981—),男,博士,副教授,研究方向为微特电机与伺服控制技术。
TM 301.2
A
1673-6540(2017)11- 0001- 05
2017 -03 -06
