基于矢量控制的五相永磁同步电机相电流重构方法研究*
2017-12-05张其林赵美玲
张其林, 全 力, 张 超, 赵美玲
(江苏大学 电气信息工程学院,江苏 镇江 212013)
基于矢量控制的五相永磁同步电机相电流重构方法研究*
张其林, 全 力, 张 超, 赵美玲
(江苏大学 电气信息工程学院,江苏 镇江 212013)
针对五相永磁同步电机控制需要电流传感器数量多、成本高的问题,提出了一种五相永磁同步电机相电流重构方法。它只使用两个电流传感器便可实现对五相电流的全采集,能有效减少硬件电路的成本和复杂性,重构精度和速度能够满足五相电机控制的需要。最后在MATLAB仿真中对所提方法进行验证,仿真结果证实了所提方法的正确性和有效性。
五相永磁同步电机;相电流重构;电流采集;电流传感器
0 引 言
五相永磁同步电机具有可靠性高、转矩脉动小、低压大功率等优点,被广泛应用于航空航天、军事武器、新能源汽车等领域。为了达到对电机的高精度控制,需要多个电流传感器以实时采集电机绕组电流信息[1]。高精度的电流传感器价格昂贵,使用多个电流传感器势必会增加硬件电路的成本和复杂性。为降低硬件电路成本,学者们展开了单电流传感器重构相电流方面的研究,其中以三相电机单电流传感器的研究最为深入[2-5]。
单电流传感器重构相电流方法主要分为两类:电流重构法与状态观测器法。电流重构法采集直流母线侧电流信息,利用母线电流与相电流对应关系重构电机相电流[6]。状态观测器法基于电机数学模型,通过采集直流侧母线电流来重构电机相电流,但需要知道准确的电机参数[7]。在实际运行过程中,由于温升、振动等原因会引起电机参数发生变化,存在电流重构精度随电机参数变化下降和低调制区域无法重构等缺点。对五相电机电流重构的问题,鲜有文献进行研究。
本文在充分分析五相永磁同步电机矢量控制原理的基础上,提出一种使用两个电流传感器的五相永磁同步电机相电流重构方法。在五相逆变器中的两个桥臂安放电流传感器,通过检测桥臂电流与指定电机相电流之和,便可实现对全部相电流信息的采集。为较好地说明该方法,本文在五相逆变器的模型上分析了不同矢量作用下逆变器电流回路,并指出不同矢量作用下电流传感器输出电流与电机相电流之间的对应关系。本方法可以在减少电流传感器数量的同时获得较高的重构精度,大大降低电机控制成本。最后通过仿真对本文所提方法进行了验证。仿真结果表明:五相永磁同步电机相电流重构方法,只需要两个电流传感器便可实现对全部电流的采集,仿真试验充分证明了此方法的有效性。
1 三相永磁同步电机相电流重构
1.1三相电流重构基本原理
三相逆变器拓扑结构如图1所示,电流传感器安装在直流母线侧。用三相逆变器A、B、C相上桥臂开关管的通断情况构成的二进制数SaSbSc(1:上管导通,0:上管关断),来描述逆变器处于该开关状态下所形成的电压矢量。例如:SaSbSc=110表示A、B相的上管打开,C相的上管关断,其形成的电压矢量为U110。三相逆变器总共有6个开关管,可以形成8个电压矢量,把空间分为6个扇区,如图2所示。
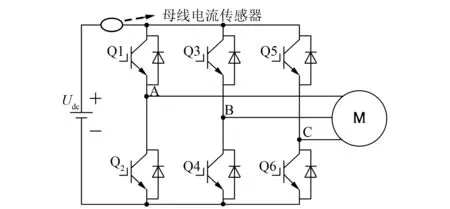
图1 三相逆变器拓扑结构

图2 空间电压矢量分布
一个PWM调制周期会存在许多不同的开关状态,逆变器处于不同的开关状态时,其对应的电压矢量也不同。表1给出了不同电压矢量作用下母线电流idc与相电流的对应关系。

表1 母线电流与电机相电流的对应关系
在七段式SVPWM调制方式中,一个SVPWM调制周期由七段基本电压矢量组成。在有效的电压矢量作用期间,利用母线电流与相电流的对应关系,采集母线电流便可以得到相电流。如图3所示:以参考电压矢量在第一扇区为例,当电压矢量U100作用时,采集母线电流可以得到A相电流值;U110作用时,采集母线电流可以得到C相电流值,然后利用ia+ib+ic=0得到电机三相电流。
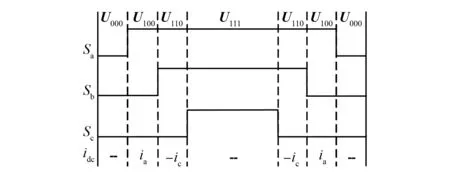
图3 第一扇区内母线电流与相电流对应关系
1.2相电流重构死区
在理想的情况下,电流传感器对电流的采样可以瞬间完成。但是在实际情况中,为了确保电流传感器可以完成对电流的采样,要求基本电压矢量最小作用时间Tmin,必须大于PWM信号死区时间Tdeadtime、电流建立时间Tset、采样保持时间Thold之和,即:
当参考电压矢量落入某些特殊区域时,基本电压矢量作用时间有一个或者两个不满足基本电压矢量最小作用时间Tmin要求,导致无法进行相电流重构。无法进行相电流重构的区域被称为重构死区,该区域内无法获得电机相电流信息,会导致电机失控。重构死区主要分为低调制区域和扇区边界区域,如图4所示。
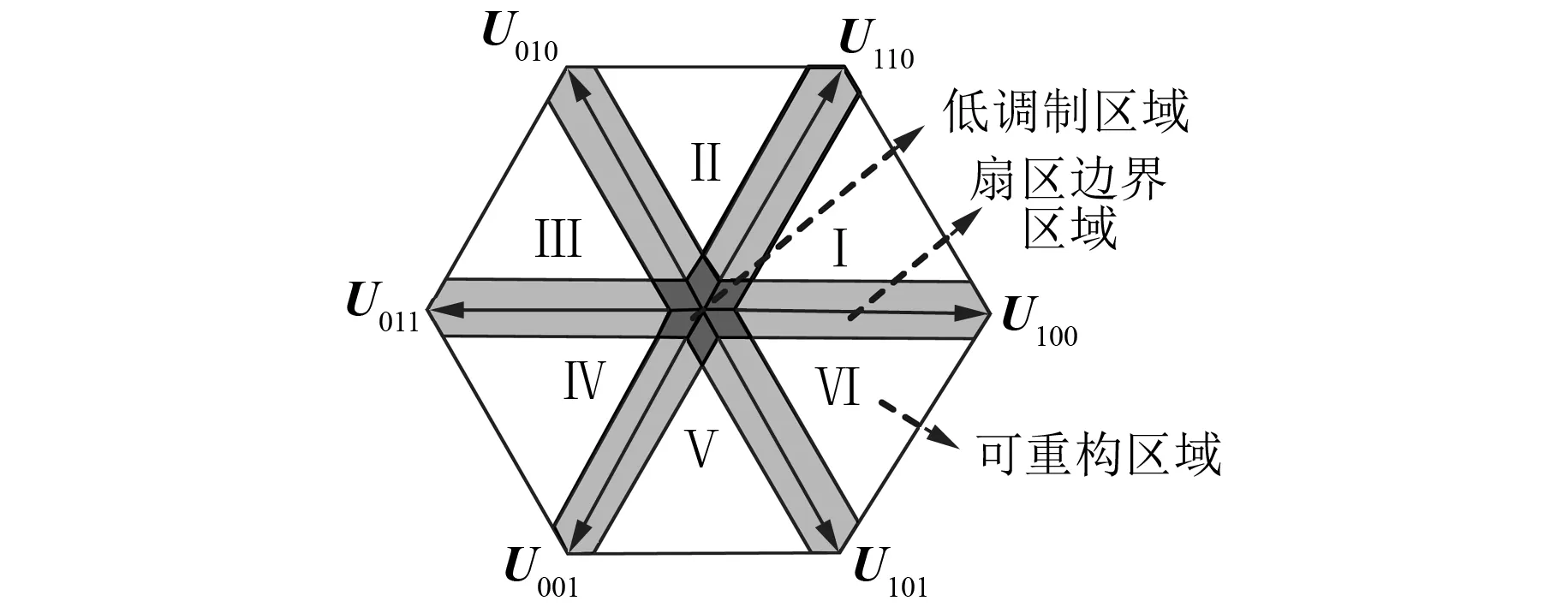
图4 相电流重构死区
当电压矢量在低调制区域时,参考电压矢量幅值很小,两个电压矢量作用时间都小于Tmin,电流传感器无法在有效电压矢量作用期间完成电机相电流采样,故无法完成电机相电流的重构。
当电压矢量在扇区边界区域时,有一个电压矢量的作用时间小于Tmin,电流传感器只能通过采样得到电机一相电流,因此也无法完成电机相电流的重构。
1.3重构死区解决方法
当电压矢量落在重构死区内,母线电流传感器无法获取相电流信息,电机易失控。为了缩小重构死区面积,文献[8]提出了平移PWM开关状态信号的方法来实现对母线电流的采样;文献[9]提出了在PWM调制周期中,用电流采样矢量代替零矢量的方法来进行相电流重构;文献[10]提出利用高频采样脉冲来实现电机相电流的采样;文献[11]把空间六边形划分成两类,在两类不同的区域内采用不同的PWM波调制方式来实现参考电压矢量的合成。但以上几种方法存在以下问题:
(1) 重构算法复杂,编程实现难度较大。
(2) 部分方法修改PWM开关信号会造成一个周期内PWM开关信号不再对称,导致电机相电流谐波增加,影响电机控制效果。
为避免上述问题,文献[12]提出了在非有效电压矢量作用时段进行采样并重构电机相电流的方法,取得了较好的效果。
2 五相永磁同步电机相电流重构
2.1五相电流重构原理分析
五相逆变器拓扑结构及传感器安装位置如图5所示,定义上桥臂开关管开通为1,关断为0。每个开关管开关状态对应着空间的一个电压矢量。五相逆变器总共有10个开关管,可以形成25个电压矢量,把空间分为10个扇区。为实现五相永磁同步电机相电流重构,需对原来的电流传感器安放位置进行重新设计,其中电流传感器1检测的是A相下桥臂与电机B相绕组电流之和,电流传感器2检测的是C相下桥臂与电机D相绕组电流之和。

图5 五相逆变器拓扑结构
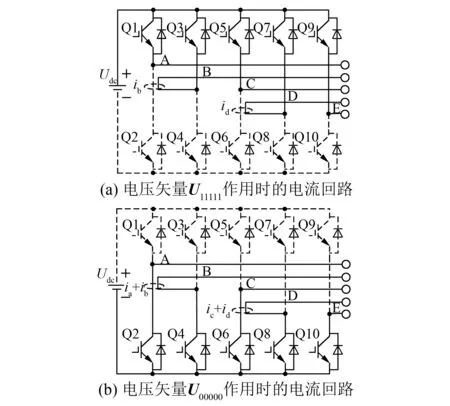
图6 五相电机逆变器拓扑结构
以图6所示结构为例,来进一步说明电流传感器输出电流与电机相电流之间的对应关系。定义电流传感器1、2的采样值分别为M、N。图6(a)为逆变器处于电压矢量U11111作用下的电流回路,此时Q1、Q3、Q5、Q7、Q9开通,电流通过A、B、C、D、E相流入电机。电流传感器1检测到的电流值M1,电流传感器2检测到的电流值N1,此时根据逆变器电流回路信息,传感器检测电流与相电流的对应关系如式(2)所示。
图6(b)为逆变器处于电压矢量U00000作用下的电流回路,此时Q1、Q3、Q5、Q7、Q9关断,电流通过A、B、C、D、E相流出电机。电流传感器1检测到的电流值M0,电流传感器2检测到的电流值N0,此时对应关系如式(3)所示。
对于不同的电压矢量,电流传感器检测到的电流值与电机相电流之间的对应关系如表2所示。其中逆变器上管开关状态不确定的用X表示,未在表2中的电压矢量为非电流采样矢量。

表2 电流传感器采样电流与相电流的对应关系
2.2矢量控制下的相电流重构
五相永磁同步电机矢量控制常用算法主要有最大相邻两矢量调制算法(Near Two Vectors SVPWM,NTV-SVPWM)与相邻四矢量调制算法(Near Four Vectors SVPWM,NFV-SVPWM)。其中,NTV-SVPWM利用扇区边界两侧的两个最大来合成所需的参考电压矢量,其算法较NFV-SVPWM算法简单,但存在伴生三次谐波无法消除、两相开关状态同时改变易造成桥臂直通等缺点,因此NTV-SVPWM算法在五相永磁同步电机控制应用上受到了很大的限制。NFV-SVPWM利用扇区边界两侧的两个最大与两个中等幅值矢量共4个电压矢量来合成参考矢量,其电机控制性能较NTV-SVPWM有大幅度提升[13-14]。因此,本文研究的重点为采用NFV-SVPWM的五相电机矢量控制下的相电流重构。
当电压矢量位于第一扇区时,参考电压矢量由零矢量(U00000和U11111)、最大幅值矢量(U11000和U11001)、中等幅值矢量(U10000和U11101)三种矢量共同作用生成,其PWM波如图7所示。在电压矢量U11111作用时,电流传感器1采集到的电流值M1,电流传感器2采集到的电流值N1。在电压矢量U00000作用时,电流传感器1采集到的电流值M0,电流传感器2采集到的电流值N0。这样根据式(2)、式(3)就可以得到ia、ib、ic、id,根据公式ia+ib+ic+id+ie=0便可计算出另外一相电流值ie。对参考矢量在10个扇区的合成情况进行分析可知:相电流重构算法在10个扇区均可以重构出五相电机的全部相电流。

图7 第一扇区内采样电流与相电流对应关系
2.3电压有效工作区域及重构区域
相电流重构方法主要利用两个特殊矢量(U00000与U11111)的作用时间来对相电流进行采样并重构。由PWM调制原理可知:这两个矢量作用时间相等,且都为零矢量作用时间T0的一半。为保证电流重构不会失效,传感器必须在U00000与U11111作用时间内采集到电流值,故需要每个矢量作用时间大于Tmin,即:0.5T0gt;Tmin。定义有效电压矢量作用时间系数为A、输出电压矢量幅值为U,则有:

式中:Amax——有效电压矢量作用时间系数最大值;
Udc——直流母线侧电压;
Umax——输出电压矢量最大幅值,即电压矢量有效工作区域的半径。
由式(6)可以看出,输出电压矢量最大幅值Umax与直流母线侧电压Udc、电压矢量最小作用时间Tmin、PWM调制频率fs有关,并随着PWM调制频率的提高逐渐缩小,促使电压矢量有效工作区域逐渐向中心靠近,如图8所示。这种方法使相电流重构区域几乎为整个电压矢量有效工作区域,重构死区并不明显。

图8 相电流重构区域
3 仿真及结果分析
为验证本文提出的重构算法的可行性,在MATLAB/Sinmulink环境下搭建重构算法仿真模型。电机选用模型库中自带的表贴式五相永磁同步电机。电机相关参数如下:定子相电阻Rs=0.23 Ω、直轴电感Ld=0.006 H、交轴电感Lq=0.006 H、永磁体磁链Ψf=0.175 Wb、极对数p=18、转动惯量J=0.008 kg·m2。控制系统参数如下:速度环Kp=0.05、Ki=0.9;电流环Kp=13、Ki=140;PWM调制频率fs=10 kHz、调制周期Ts=0.000 1 s;逆变器直流母线侧电压Udc=140 V。控制系统结构框图如图9所示。电机采用NFV-SVPWM控制策略,利用PWM驱动信号控制电压型五相逆变器给电机供电。电机电流经过解耦分为直轴电流id、交轴电流iq,分别对id、iq进行闭环


图9 重构算法结构框图
为说明相电流重构算法的有效性,在电机稳态运行时进行了仿真。给定电机转速为n=800 r/min,负载保持T=8 N·m恒定,此时的电流波形如图10所示。图10(a)、图10(b)分别为电机的转速与转矩波形,图10(c)是利用该算法重构得到的电机A相电流,图10(d)为电机实际的A相电流。

图10 稳态时的相电流
为了分析采用重构算法后,重构相电流是否会出现高频谐波增多的情况,分别对图10(c)、图10(d)进行电流FFT分析,其结果如图10(e)和图10(f)所示。由于五相永磁同步电机控制方面的原因,所以实际的电机相电流包含有一定的谐波畸变。利用重构算法进行相电流重构后,总谐波畸变率从6.00%小幅度增加到7.83%,重构得到的相电流总谐波畸变率并未明显增加。
保持电机转速n=800 r/min恒定,电机负载在1 s时由3 N·m突变到8 N·m的情况下进行试验,结果如图11所示。从图11(a)、图11(b)可以看出电机负载增大后,转速先出现下降后逐渐上升并稳定在给定转速,电机转矩上升并趋于稳定。

图11 负载变化时的电流传感器输出与相电流
从图11(c)中可以看出电流传感器1输出电流包含有A相电流信息,与理论分析相符。从图11(d)可以看出电机电流含有一定的高频谐波,这是由五相电机控制方式导致的。从图11(e)可以看出利用重构算法得到相电流也包含有一定的高频谐波。从图11(e)、图11(d)对比来看,相电流重构精度与负载变化无关,重构的相电流与实际的相电流吻合度较高,重构的相电流可反映实际的相电流。
保持电机负载T=8 N·m恒定,使电机转速在1 s时由300 r/min突然增大到800 r/min,相关电流波形如图12所示。从图12(e)与图12(d)对比可以看出,相电流重构算法从电机低速到电机高速均可准确地重构相电流信息。
为了验证相电流重构方法在实际控制系统中的可靠性,在T=8 N·m、n=800 r/min、控制系统参数相同的情况下,对采用相电流重构方法的NFV-SVPWM控制和采用多传感器的NFV-SVPWM控制进行对比试验,结果如图13所示。从图13(a)、图13(b)可以看出采用相电流重构方法控制后电机转速脉动稍微增加,但基本可以忽略。从图13(c)、图13(d)可以看出采用相电流重构方法控制后,稳态时电机转矩脉动较传统多传感器控制的电机转矩脉动稍微增加,但增加幅度不大。从图13可以看出采用相电流重构方法在降低传感器数量的同时保证了电机较好的控制效果。
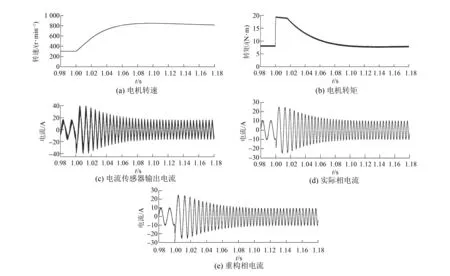
图12 转速变化时的电流传感器输出与相电流
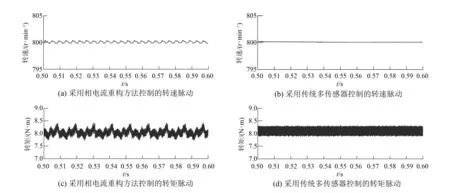
图13 相电流重构控制与传统多传感器控制对比
4 结 语
为减少五相永磁同步电机中电流传感器的数量,将三相永磁同步电机电流重构技术应用于五相永磁同步电机。本方法可以快速准确地实现对相电流的重构,在减少传感器数量的同时获得较好的电机控制性能。本文首先研究了传统的三相电流重构原理及其重构死区,然后分析了五相逆变器中电流回路的情况,据此提出五相电机相电流重构方法,通过在逆变器中的两个桥臂上安放电流传感器来检测桥臂电流与指定绕组相电流之和,借助电流传感器输出电流与相电流的对应关系得到五相电流的全部信息。最后在MATLAB软件中完成了系统建模以及对所提算法的验证。仿真结果表明:五相永磁同步电机相电流重构精度不随负载、转速的变化而改变,仅需两个电流传感器便可实现各种运行状态下的五相电流高精度重构,大大减小了电路的成本和复杂性。仿真结果充分验证了本文所提算法的正确性和有效性。
[1] 袁登科,胡宗杰,王焜.五相永磁同步电机矢量控制系统仿真分析[J].大功率变流技术,2016(4): 18-22.
[2] BOYS J T. Novel current sensor for PWM AC drives[J].IEE Proceedings B-Electric Power Applications,1988,135(1): 27-32.
[3] JANG Y H, KIM D Y, KO A Y, et al. Three phase current reconstruction method using predictive current in three shunt sensing PWM inverter[C]∥ IEEE Transportation Electrification Conference and Expo, Asia-Pacific, IEEE, 2016: 436-440.
[4] KIM K S, YEOM H B, KU H K, et al. Current reconstruction method with single DC-link current sensor based on the PWM inverter and AC motor[C]∥ Energy Conversion Congress and Exposition, IEEE, 2014: 250-256.
[5] IM J H, KIM S I, KIM R Y. An improved saliency-based sensorless drive with single current sensor using current prediction method for permanent-magnet synchronous motors[C]∥ IEEE Vehicle Power and Propulsion Conference, IEEE, 2016: 1-6.
[6] PARK J, JUNG S, HA J I. Phase current reconstruction with single DC-link current sensor for six-step operation in three phase inverter[C]∥ IEEE Energy Conversion Congress and Exposition, IEEE, 2015: 906-912.
[7] HAFEZ B, ABDEL K A S, MASSOUD A M, et al. Single-sensor-based three-phase permanent-magnet synchronous motor drive system with luenberger observers for motor line current reconstruction[J].IEEE Transactions on Industry Applications,2014,50(4): 2602-2613.
[8] 顾义坤,倪风雷,杨大鹏,等.基于母线电流传感器的相电流重构方法[J].电机与控制学报,2009,13(6): 811-816.
[9] LAI Y S, LIN Y K, CHEN C W. New hybrid pulsewidth modulation technique to reduce current distortion and extend current reconstruction range for a three-phase inverter using only DC-link sensor[J].IEEE Transactions on Power Electronics,2013,28(3): 1331-1337.
[10] KIM H, JAHNS T M. Phase current reconstruction for AC motor drives using a DC-link single current sensor and measurement voltage vectors[C]∥ IEEE, Power Electronics Specialists Conference,IEEE,2005: 1346-1352.
[11] LU H, CHENG X, QU W, et al. A three-phase current reconstruction technique using single DC current sensor based on TSPWM[J].Power Electronics IEEE Transactions on,2014,29(3): 1542-1550.
[12] CHO Y, LABELLA T, LAI J S. A three-phase current reconstruction strategy with online current offset compensation using a single current sensor[J].IEEE Transactions on Industrial Electronics,2012,59(7): 2924-2933.
[13] 张静.五相永磁同步电机驱动及容错控制的研究[D].哈尔滨:哈尔滨工业大学,2015.
[14] 薛山,温旭辉.基于矢量空间解耦的五相永磁同步电机建模与仿真[J].微特电机,2006,34(6): 21-23.
ResearchonPhaseCurrentReconstructionAlgorithmforFive-PhasePermanentMagnetSynchronousMotorBasedonVectorControl*
ZHANGQilin,QUANLi,ZHANGChao,ZHAOMeiling
(School of Electrical and Information Engineering, Jiangsu University, Zhenjiang 212013, China)
Considering the problem of over many current sensors used in five-phase permanent magnet synchronous motor control system, a new method of current reconstruction for five-phase permanent magnet synchronous motor was proposed. This method used only two current sensors to realize full acquisition of five-phase current, could effectively reduce the cost and complexity of the hardware circuit. The reconstruction precision and speed could meet the needs of five-phase permanent magnet synchronous motor control. Finally, the proposed method was validated in MATLAB. Results showed the correctness and effectiveness of the proposed method.
five-phasepermanentmagnetsynchronousmotor;phasecurrentreconstruction;currentacquisition;currentsensor
国家自然科学基金项目(51377073)
张其林(1990—),男,硕士研究生,研究方向为永磁同步电机及其驱动系统。全 力(1963—),男,博士生导师,教授,研究方向为特种电机和汽车的电气控制技术。
TM 351
A
1673-6540(2017)11- 0018- 08
2017 -03 -25
