水下机器人(ROV)在水库大坝检测作业的安全分析
2017-12-01张洪星
吕 骥,张洪星,陈 浩
(上海遨拓深水装备技术开发有限公司,上海 201306)
水下机器人(ROV)在水库大坝检测作业的安全分析
吕 骥,张洪星,陈 浩
(上海遨拓深水装备技术开发有限公司,上海 201306)
文章针对现有的水库大坝水下检测作业中,缺少ROV相关的作业安全分析(JSA)规范的事实,提出有必要制定JSA方案,以便适应于水库大坝水下检测作业。通过分析ROV的作业环境,讨论ROV作业团队的安全隐患及对策,ROV设备的安全及对策。通过采用JSA,包括在编写项目作业方案时进行风险预判,以及列出ROV作业相关的子项并逐条分析作业风险,从“软件”方面提高设备在复杂环境下作业的使用安全等级。
水下机器人(ROV);水库大坝;检测作业;作业安全分析(JSA)
1 背景介绍
水下机器人(Remote Operational Vehicle,ROV),或者说无人有缆潜器,是一种利用自身搭载的仪器设备在水下进行人为操纵作业的潜水设备。水下的ROV本体有浮力材料、框架、推进器及相应的电子舱,水上的控制系统通过一定长度的脐带缆将电力和控制信号传到水下的ROV本体,并将数据信号上传到控制系统并输出。ROV本体利用浮力材料来调整载荷的大小,通过改变框架来选择搭载诸如高清摄像头、广角/微光摄像头、图像声呐、三维扫描声呐、侧扫声呐、多波束声呐、超短基线信标、多功能机械手、采样仪器等设备。其广泛应用于海洋油气作业、海底管道检测、科学考察等海洋水体,也可适用于陆上水体的水下结构物观测、水库电站的检测以及渔业观测作业等。
在国内的水利水电工程中,现有9万多座水库大坝,内河流域还有众多水闸需要检测[1]。这些水库大坝中,除了近十年新建的大型、特大型水库和高坝,多数为建国后十年修建的中小型水库,以现在的安全标准来评估,多数水库大坝存在诸多安全隐患。在水库大坝安全检测和维护过程中,需要探明水下混凝土缺陷、大坝渗漏、面板裂缝与淘蚀、金属结构腐蚀和水库淤积等安全运行隐患。
作为水利水电水下设施的现场检测技术手段之一,相比利用超声波、水下电视、电磁法、电场法、电极法等其他现场检测技术,利用ROV作为检测平台,可以搭载光学和声学仪器对大坝、涵洞、闸门等水下结构进行水下全方位扫描检测,并可对重点部位近距离“驻足”观测测量。检测数据通过数字化的形式储存,形成水库、大坝、水闸等结构的“体检”档案。
在海洋油气作业中,考虑各种海况变化的不确定性,ROV的作业安全分析-Job Safety Analysis(JSA)是作为行业规范来执行的。而在现有的水库大坝水下检测作业中,没有ROV相关的作业安全分析规范。一方面,国内越来越重视利用新的高科技手段,包括水下机器人,来确保满足在水利工程从简单到复杂等各种环境条件下的作业安全要求。另一方面,随着ROV产业化的推广,ROV制造企业逐渐转变为以工程服务带动产品销售,在各种小型/中型ROV应用到水利工程服务中,尤其是相对具有复杂环境的水库大坝水下检测作业时,设备的自身安全和适应作业要求的改装也变得日益重要。所以,制定适应于水库大坝水下检测作业的ROV作业安全分析(JSA)就变得很有必要。
2 ROV作业环境分析
在水利水电工程中,ROV作业环境一般位于水库大坝的坝前和坝后区域、引水隧洞/涵洞的充水环境、内河水闸和桥梁的水下区域等。其工作环境因素包括:水流速、水下能见度、水面杂物、水底堆积物和水下复杂结构等。
3 ROV人员的安全及对策
ROV作业是以团队合作为基础的,考虑到在水利水电工程的检测作业现场可能出现的安全隐患,需要考虑作业人员的安全注意事项并采取相应的对策。
3.1 高压电
电动观察级ROV工作电压是220V交流或380V交流。经过电源转换脐带缆传输270~300V直流,这些电压值对人员构成了潜在的危害。
作业级ROV,输入工作电压为380V交流,经过变压器升压输出2000/3000V高压,通过脐带缆到达ROV的变压器模块,这些高压对人员构成潜在的危害。
3.2 推进器
电动ROV的推进器需要在下水前后进行岸上检测调试,这时要注意避免触碰高速推进器,防止造成伤害。
液压ROV也要进行岸上调试,推进器的压力控制可达300Bar以上,对接近推进器的人员构成了潜在的危险。
3.3 液压油
ROV系统中的液压油泄漏会对环境造成污染。
3.4 对策措施
(1)根据技术手册,熟知推进器、变压器的工作原理。
(2)穿戴劳保防护用品。
(3)连接/拆卸系统各部分的电缆线时,应确保电源控制箱的主电源开关处于关闭状态。检修人员要配置两人,一人操作,一人看护协作,保证手干燥或戴绝缘手套,拆线前先用接地导线棒接触放电,使用万用表检查带电情况。
(4)针对推进器,在进行岸上推进器调试时,检测人员和ROV操作员要时刻保持对讲机工作正常、沟通正常,同时避免正面接触高速运行的推进器。
4 ROV设备的安全及对策
水下检测是水利工程日常管理、应急抢修、水库大坝安全评估不可或缺的重要技术手段。基于ROV的水下检测技术已经越来越多应用于水利工程中,包括:三峡大坝的导流底孔封堵检修门水下清理工作[2], 长江航道治理中的应用[3], 基于三维成像声呐技术的水下结构检测方法[4],在阿海水电站大坝、闸门槽和流道的水下检测应用[5]。
4.1 作业时设备的安全隐患
ROV在水库大坝水下检测中会有一定的使用局限性:首先在应用中存在脐带缆易缠绕和大坝渗漏点难于发现的问题[6];其次,不宜在流速大于0.75m/s、垃圾杂物多、水下结构复杂等环境中检测作业,避免出现水下树枝、渔网、垃圾袋等杂物缠绕脐带缆和推进器的问题;在水质较差的区域,需要依靠声呐系统代替光学摄像来获取结构信息,但是声呐仪器的精度差异造成扫描成像的质量问题。
4.2 采取的对策
对于这些作业中出现的问题和难点的解决,一方面是“硬件”方面的提高,包括高清摄像技术的应用,高精度声呐扫描成像技术的应用;另一方面,通过采用作业安全分析(JSA),在人员和管理上从“软件”方面提高设备在复杂环境下作业的使用安全等级。
5 ROV的作业安全分析(JSA)的应用
ROV的作业安全分析(JSA)是一种应用于设备作业安全的评估手段。它主要是根据项目方案中对ROV在作业中所有可能出现的安全隐患和风险做出预先分析和评估并做出安全分析表格,然后通过作业团队的讨论沟通完善这个表格内容,使得作业团队充分理解整个项目的风险意识,并在同业主沟通项目方案时,按照JSA的事项获得业主的支持和理解,从而提高项目方案的可行性。
JSA工作安排在现场勘查作业完成后,配合项目作业方案同时展开。这里通过现场案例的回顾,来展示JSA的工作。
5.1 编写项目作业方案,进行风险预判
根据现场勘察结果对作业中存在的风险进行预判,找出作业中可能存在的风险点。一般JSA由经验丰富的主管领导主持,作业团队成员全部参与。要明确作业中可能存在的风险,并找出应对的方法,确保作业中人员和设备安全得到有效的保障。对限制性作业内容,严格遵守作业许可制度,按照相关规定进行作业,特殊作业还需要另行申请备案,确保作业中不出现安全隐患,最大限度的保障人员和设备的安全。
一般常见ROV作业JSA主要包括工作人员的直接风险和非直接风险、设备在作业中存在的直接或间接风险。人员工作中存在的非直接性风险包括工作中通讯不畅,人员滑倒、摔伤,搬运姿势不正确导致扭伤等;人员的直接风险包括作业中因误操作或设备故障等因素导致的人员被机器磕伤,电击,液压冲击,噪声等因素伤害。
作业风险控制的方法是根据作业时产生的风险和控制等级对作业中的风险进行分类,提高风险的辨识与控制力度,科学提高作业安全系数。
5.2 列出作业子项
在方案列出后,具体列出ROV作业相关的子项并逐条分析作业风险。
5.2.1 ROV布放方式
根据大坝的结构及现场环境条件来确定,可以选择ROV在岸上连接调试完成后,通过岸上吊机吊放入水。ROV使用LOCK-LATCH锁扣装置,通过岸上人员操作,给水面ROV解锁释放;或者通过水面小船的人员给水面的ROV解扣。
5.2.2 ROV碰撞和推进器缠绕
在ROV上安装防护支架或防碰垫,保护ROV本体在水下运动时搭载的传感器等设备。ROV操作手操作ROV在水下运动时,要观察水下情况,避开水下的网状物或绳子,减少对ROV的威胁。如果ROV的运动轨迹与实际操作的轨迹有偏离(跑偏或者转圈),可能造成脐带缆有异物缠绕或者推进器本身故障,回收ROV出水检查。
5.2.3 脐带缆缠绕
ROV领航员按照作业前确定的下水路线(下水点的确定,水下多少高程开始移位)下潜和回收,下潜过程若路径因水下结构物有变化,提醒副操在下水记录表中记录结构物特征和所处位置,回收ROV时在路径变化位置注意。岸上放缆人员时刻观察脐带缆在水中的走向,听从ROV领航员的放缆长度;在回收缆过程中如发现拉缆费力或拉不动立即停止拉缆,并需提醒ROV领航员,ROV领航员根据声纳图像标定的反射板距离确定ROV的位置定位。
考虑坝体铁质金属结构对ROV路径的影响,ROV不要贴近坝体,以避免局部较大流速造成操作和定位困难。为避免该类风险,在作业前需要对作业区域有一定的了解。
(1)对孔洞门槽位置的辨认。
(2)水下移动方向辨识。
(3)清理和搬运大体积重物。采用作业级ROV,搭载多功能机械手。
(4)清理狭小分析内的异物。搭载多功能机械手,在机械手能够工作的区域使用机械手,在设备运动不畅的区域使用外接工具代替ROV本体进行工作。
(5)脐带缆在绷紧的情况下被水下结构割破甚至割断的极端情况。
(6)ROV本体被引水隧洞附近的水流带向拦污栅被挂住/卡住,而无法靠自身动力挣脱。通过业主确认可否将ROV被吸的引水隧洞所在机组关闭,调整为远端机组发电。或者等待机组检修时再考虑ROV解脱。
图1列出了有关ROV的作业安全分析(JSA)应用的逻辑框图。
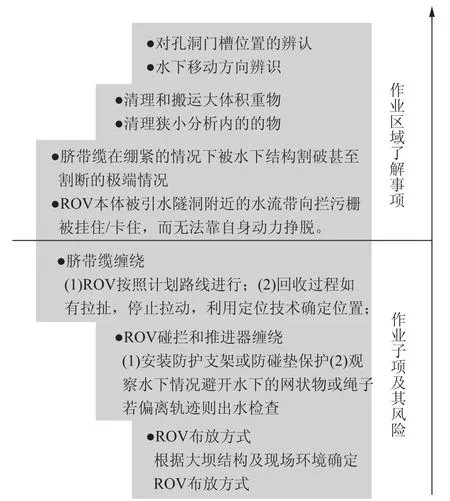
图1 ROV的作业安全分析应用逻辑框图
6 结论
本文通过提出并制定一种适应于水库大坝ROV水下检测作业的JSA方法(ROV的作业安全分析),使得在面对水库大坝复杂环境的水下检测作业时,ROV及搭载仪器的自身安全性得以提高,而且还扩大了作业设备的改装适应性。
[1]贾金生.中国水利水电工程发展综述[J].Engineering,2016,2(03): 302-312.
[2]单宇翥,陈洋.水下机器人在三峡水利枢纽导流底孔封堵检修门水下清理工程中的应用[J].大坝与安全,2005(03):51-53.
[3]张晏方,邓勇,毕文焕,等.水下隐蔽工程检测技术在长江航道整治工程中的应用[J].水运工程,2010(10):64-69.
[4]戴林军,郝晓伟,吴静,等.基于三维成像声纳技术的水下结构探测新方法[J].浙江水利科技,2013(03):62-65.
[5]李福年,陈慕雄,田维坤.ROV原理及在阿海水电站工程中的应用[J].云南水力发电,2013(03):119-121,133.
[6]郑发顺.遥控水下机器人系统在水库大坝水下检查中的应用[J].水利信息化,2014(02):45-49,51-53.
TV698.1
A
1672-2469(2017)10-0112-03
10.3969/j.issn.1672-2469.2017.10.031
2017-08-08
吕 骥(1978年-),男,工程师。
