基于自适应控制的车灯转动系统的设计
2017-11-30杜洋江苏无线电厂有限公司
杜洋 江苏无线电厂有限公司
基于自适应控制的车灯转动系统的设计
杜洋 江苏无线电厂有限公司
汽车在夜间行驶,由于固定式的车灯不能随车实际的行进方向同步,因此造成了视野盲区,容易引发交通事故。为了提高驾驶员夜间行车的安全性,设计了一种车灯随动控制系统。
自适应控制 角度传感器 模糊控制
本文设计了一种行车灯控制系统,该系统可以自动控制近光灯随车轮转动,增加驾驶员的可视范围,降低了事故风险。
1 车灯控制系统
本系统通过传感器将车轮转动的角度转化为电信号输入到控制芯片中,然后再将信号输出给照明灯转动电机,从而实现对车灯照射角度的改变。系统示意图如图一所示。
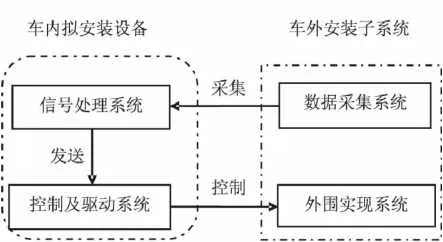
图1 控制系统结构简图
2 自适应控制系统
2.1 自适应控制概述
自适应控制系统能够根据参数改变,而进行自身特性的调整的反馈控制系统,具有线性定常的特性。自适应控制器设计的参考因素包括:收敛性、稳定性和鲁棒性,自适应控制系统模型由于其获得的信号的特性中没有计生高频成分,故可能会导致系统的不稳定。该系统使用收敛性分析方法应用具有一定局限,不能适用于复杂的模型上,并且对适用条件要求严格。
2.2 自适应控制器
汽车在转弯过程中转向轴偏转的角度称为偏差。系统采用双端输入、单端输出,确保系统控制输入输出的稳定性和准确度。定义E为偏差,De为偏差变化率,E和De作为双端输入量,转动角度P作为单端输出控制量。
方向盘极限偏差为540°。假设偏差E的离散点数量为 15,则其论域为:{1,2,3,4,5,6,7,8,9,10,11,12,13,14,15},DE与 E的 论 域 相 同。 用 符 号{ZB,ZV,ZM,ZS,Z,YS,YM,YV,YB}分别表示偏差量定性描述{左大,左较大,左中,左小,零,右小,右中,右较大,右大}。
转动角度P相对参考点的论域为{-35,35}。其离散点分别为{-5,-4,-3,-2,-1,0,+1,+2,+3,+4,+5} 共 计 11 个,定量描述取{左大,左中,左小,右小,右中,右大},用字母表示为{ZB,ZM,ZS,YS,YM,YB}。
假定向左为正,向右为负,则车轮偏转角度上下限为±35°,转向轴偏差范围为±540°,偏差E的基本论域为{-540,540}。取n=7,离散为15个点,定义量化系数为k1,由式(1)计算得:

设偏差变化率的实测值Ds,它是非线性连续的。假设De的变化范围为{-5,5},取n=5,离散为11个点,则量化系数k2通过(1)计算得0.009。Ds经过模糊处理后,映射到De论域上的点Ns计算得:

若偏差变化率实测值为Es,则模糊化侯的论域点可计算:

偏差隶属度采用等腰三角形模化法确定,偏差E的定性描述模糊划分如图2所示。De的定性描述模糊划分与图2相似,只需将坐标轴转化为De。
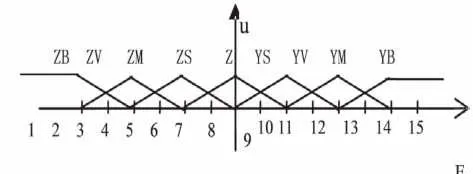
图2 偏差E模糊划分
参照专项控制系统特点,偏差E、转角P和偏差变化率De相互影响,构成蕴涵关系。因此,系统的控制能力取决于偏差和偏差变化率,两者均较大时,控制力强。De较小时,系统稳定。
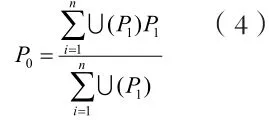
模糊化后的输入偏差和偏差变化率为模糊量,分别将两个输入的模糊量定义为H0、G0,定义输出的模糊量为M0。则。然后根据E、De的偏差模糊量计算得到M0。清晰量P按照系统中心法得:
根据设计,前照近光灯的转动角度P上下限为±35°。取值n=5,其论域离散为11个点。转换比例因子设Np为P论域上的点,则输出的实际控制量
3 转角控制模块设计
3.1 角度传感器
角度传感器用于感应转动角度的变化,转轴每转过22.5°,计数一次。同方向转动计数增加,反向改变计数减小。传动驱动系统动作频率高,也要求较高的精度,采用四环闭环控制配置角度传动系统,以减少机械磨损导致的误差。
3.2 电机控制单元
步进电机的速度影响了其是否能够正常启动,为使电机正常启动并且能高速运转,本系统的脉冲频率采用线性曲线脉冲的方式。选取升压升频驱动方式的电机,恒压控制驱动电路,采用8通道的逻辑驱动,便于对单极两相步进电机或者直流电机进行驱动。
4 结束语
本文设计的车灯随动系统,采用了模糊控制算法和自适应系统两种方式,以方向盘的连续转动为信号源,在影响原有照明设计的条件下实现对车灯的随动控制。增加了驾驶员夜间行车的可视范围,保障了行车安全。
[1]袁慧彬.汽车前照灯转角模糊控制设计[J].四川职业技术学院学报,2009,19(2):116-117.
[2] Jin Q B, Liu S W, Ling Q, et al. Internal Model Control Based on Singular Value Decomposition and Its Application to Non-square Processes[J]. Acta Automatica Sinica, 2011, 37(3):354-359.
[3] Qian a L I, Bin a L I, Zhu X D B. Fuzzy Self-adjusting PID Controller Design and Simulation[J]. Control amp; Instruments in Chemical Industry,2010.
杜洋,1989.12,男,汉族,江苏省南京市,本科,助理工程师,从事电子通信方面的研究。