新型路缘石滑模机的初步设计
2017-11-30陈立东陈秀宏王卫东郭广亮刘荣昌冯利臻李国昉
陈立东,陈秀宏,王卫东,郭广亮,刘荣昌,张 亮,冯利臻,李国昉
新型路缘石滑模机的初步设计
陈立东1,2,陈秀宏1,王卫东3,郭广亮4,刘荣昌1,张 亮1,冯利臻1,李国昉1,2
(1.河北科技师范学院机电工程学院,河北秦皇岛 066600;2.河北科技师范学院农业机械研究所,河北秦皇岛 066600;3.中信渤海铝业控股有限公司,河北秦皇岛 066000;4.秦皇岛科博工程机械制造有限公司,河北秦皇岛 066604)
为了解决传统路缘石修筑方法费工、费时、效率低、质量差等问题,以18 kW拖拉机发动机为滑模作业动力源,采用虚拟设计与样机试验相结合的方法,为新型路缘石滑模机设计路面不平自适应高度调整系统、四柱双缸并联同步液压系统、高压水清洗系统及自适应转弯系统。结果表明,样机作业速度达到2~14.5 m·min-1,转场速度达到35 m·h-1,滑模作业表面光滑,满足设计指标要求,可为新型路缘石滑模机的改进提供借鉴。
路缘石;滑模机;高压清洗系统;自适应调整
0 引言
与人工作业方式相比,采取路缘石滑模自动成型机械进行路缘石浇筑成型,可以提高成型质量和作业效率,节约劳动力,降低作业成本,减少资源浪费[1-4]。目前,国内现有的路缘石滑模机大多采用自行方式,作业时虽然也能实现一定程度高度的调整,但调整精度较低,作业后也需要运输车辆进行辅助转场,效率非常低,同时作业后由于工作装置与混凝土物料之间有较强的黏附性[5-10],需要专门运到清洗场地进行模具清洗,而清洗效果并不理想。因此,开发性能良好、转场效率高且价格适中的路缘石滑模机对促进道路施工机械技术进步、加快改善路缘石施工方式具有重要作用。
1 新型路缘石滑模机的基本组成
新型路缘石滑模机主要由机体、物料输送装置、物料成型装置、动力装置、行走装置、找平装置、升降装置、牵引装置、高压清洗系统等组成,如图1所示。
2 路面不平自适应高度调整系统的设计
自适应高度调整系统是新型路缘石滑模机的重要组成部分,集控制技术、机械设计、液压传动、检测与转换技术等于一体,主要由找平仪检测装置和控制系统等组成[11]。当作业路面不平时,滑模机通过高度调整系统在找平仪调高范围内实时调整高度适应路面变化,使滑模机达到最佳作业效果。
2.1 自适应高度调整控制系统的组成
滑模机作业时,首先由控制系统根据找平仪滑杆的偏移信号自动输出滑模机在本作业面采样点的高度控制信号,这些控制信号经D/A转换、放大,施加于高度调整液压系统,控制滑模机的四柱液压缸,使滑模机上升或下降,对滑模机位置进行及时调整,实现滑模机的自适应高度变化,以保证作业效果。控制系统的组成如图2所示[12]。
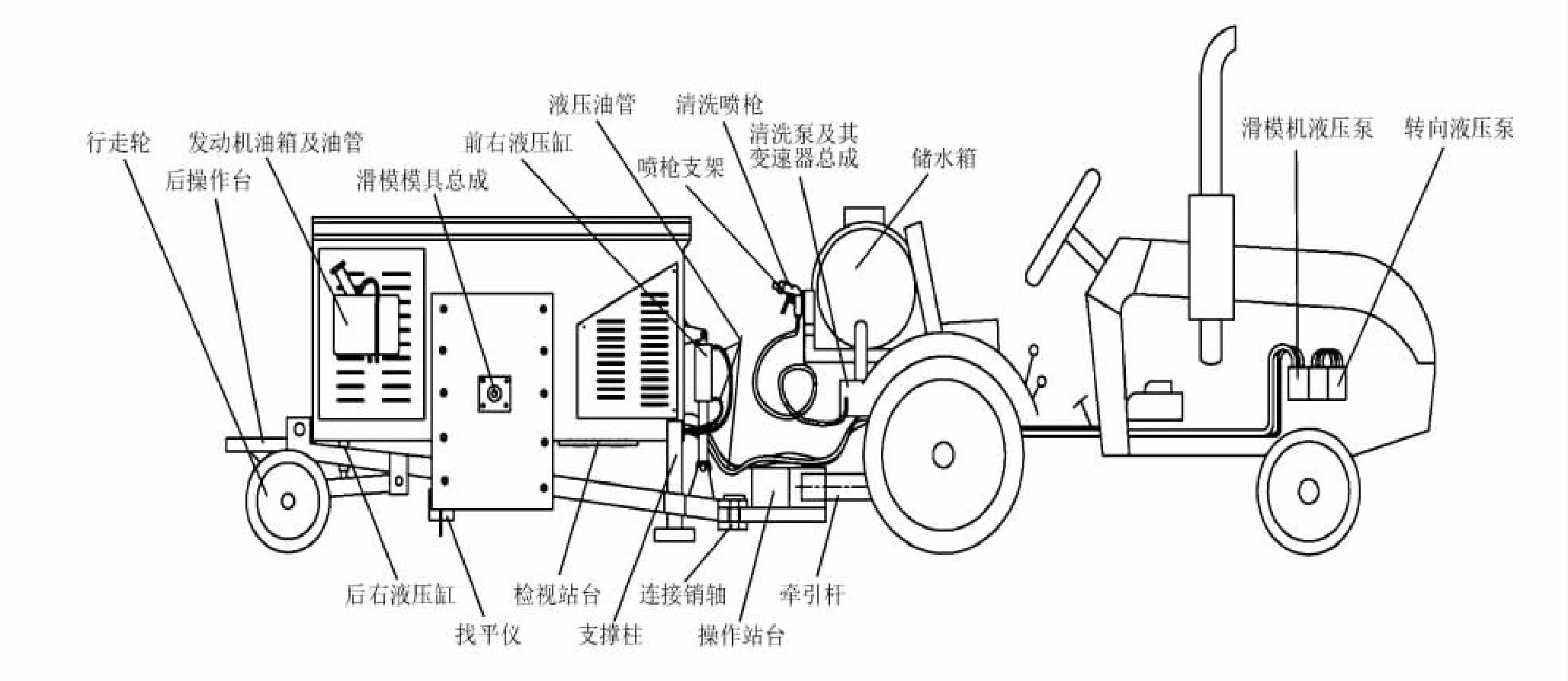
图1 新型路缘石滑模机的总体结构

图2 自适应高度调整控制系统
2.2 自适应高度调整控制策略的选择
自适应高度调整控制系统采用了专家PID控制算法[13-14],其控制器原理如图3所示。本控制系统运行实践结果表明:控制器的鲁棒性好,控制精度高,能很好地适应外界条件变化,有较强的抗干扰能力,在控制过程中专家PID控制器的控制与决策符合人的思维逻辑,有较高的人工智能效果。
3 四柱双缸并联同步液压系统的设计
四柱双缸并联同步液压系统由4个双作用液压缸、4个M型三位四通换向阀、4个液压锁组成。其中滑模机前方设置2个液压缸,且分别与2个分流集流阀连接,通过控制器控制2个液压缸且实现同步升降[15];另2个液压缸设置在滑模机后方,通过控制器控制2个液压缸,实现独立升降,提高滑模机的控制灵活性。四柱液压缸分别与连杆机构及滑模机机架连接。4个三位四通换向阀分别与4个液压锁通过油管相连,换向阀与换向阀之间串联连接。四柱双缸液压原理如图4所示。
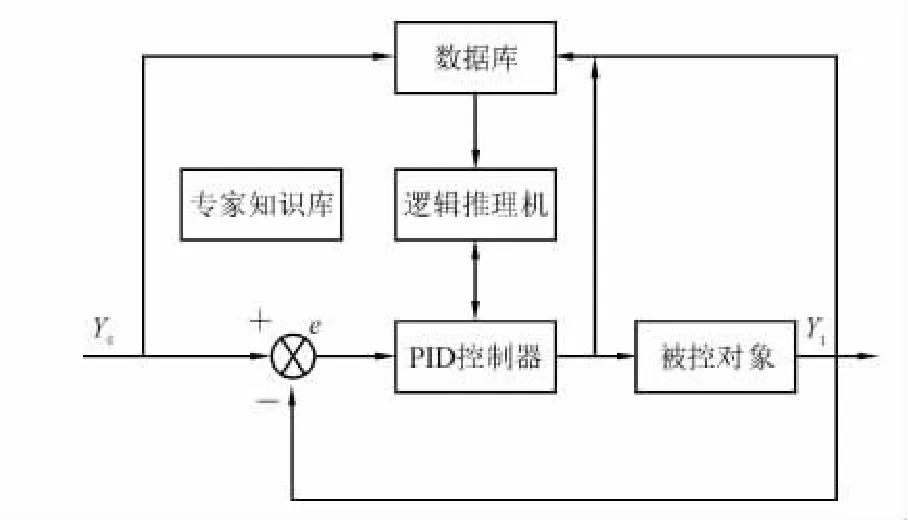
图3 专家PID控制器原理
滑模机工作过程中,液压泵在牵引拖拉机的带动下将油箱中的液压油吸出,其中液压油经滤油器过滤后分为二路:一路经过先导式溢流阀调压后连接油箱,具有对系统的调压功能;另一路流经单向阀进入三位四通换向阀、双向液压锁、分流集流阀后进入液压缸的无杆腔,液压油从液压缸的有杆腔流出,经液压锁和三位四通换向阀返回油箱。
当三位四通换向阀处于中位时,由于原有的进油和回油管路不通,系统保持原有压力,从而实现滑模机作业过程中的保压。
3.1 同步控制的前端液压系统
同步控制的前端液压系统由分流集流阀控制,组成包括油箱、过滤器、液压泵、电动机、单向阀、先导式溢流阀、三位四通换向阀、分流集流阀、双向液压锁和液压缸。滑模机前端左右2个液压缸在下降工进时,2DT通电吸合后三位四通换向阀右位接通,液压油在液压泵作用下经单向阀、三位四通换向阀、双向液压锁右侧单向阀进入有杆腔,无杆腔内液压油由分流集流阀以等分流量经液压锁、三位四通换向阀后回油箱。滑模机需要调整上升时,液压缸在1DT通电吸合后,三位四通电磁换向阀左位接通,液压油经油泵、三位四通换向阀、双向液压锁进入分流集流阀,等分流量进入双液压缸无杆腔,推动滑模机机体前端同步上升,有杆腔的液压油经双向液压锁后经三位四通换向阀流回油箱[16]。本滑模机液压系统油路2个方向分别有分流集流作用,有效保证了2个液压缸在上升和下降时的同步运行,且同步精度较高。
3.2 独立控制与同步控制相结合的后端液压系统
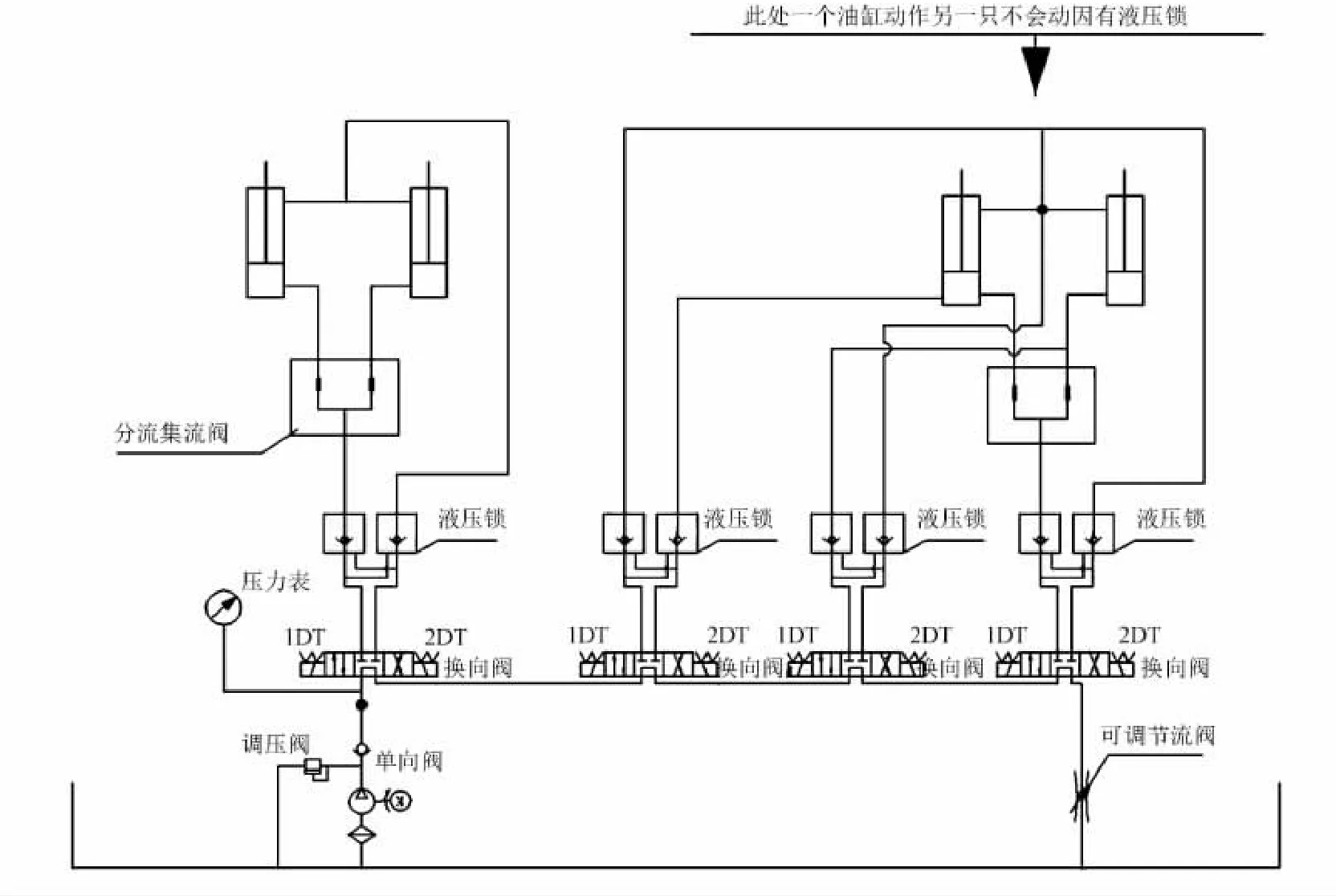
图4 四柱双缸并联同步液压原理
为了提高滑模机升降系统的灵活性,滑模机后端的2个升降液压缸采用独立控制与双缸同步液压控制相结合的液压回路。该液压回路由3部分组成,即由液压锁及三位四通换向阀控制的2个独立的控制回路和由分流集流阀控制的液压同步系统[17],其组成包括油箱、过滤器、液压泵、单向阀、溢流阀、3个串联的三位四通电磁换向阀、分流集流阀、双向液压锁和液压缸,系统原理如图5所示。
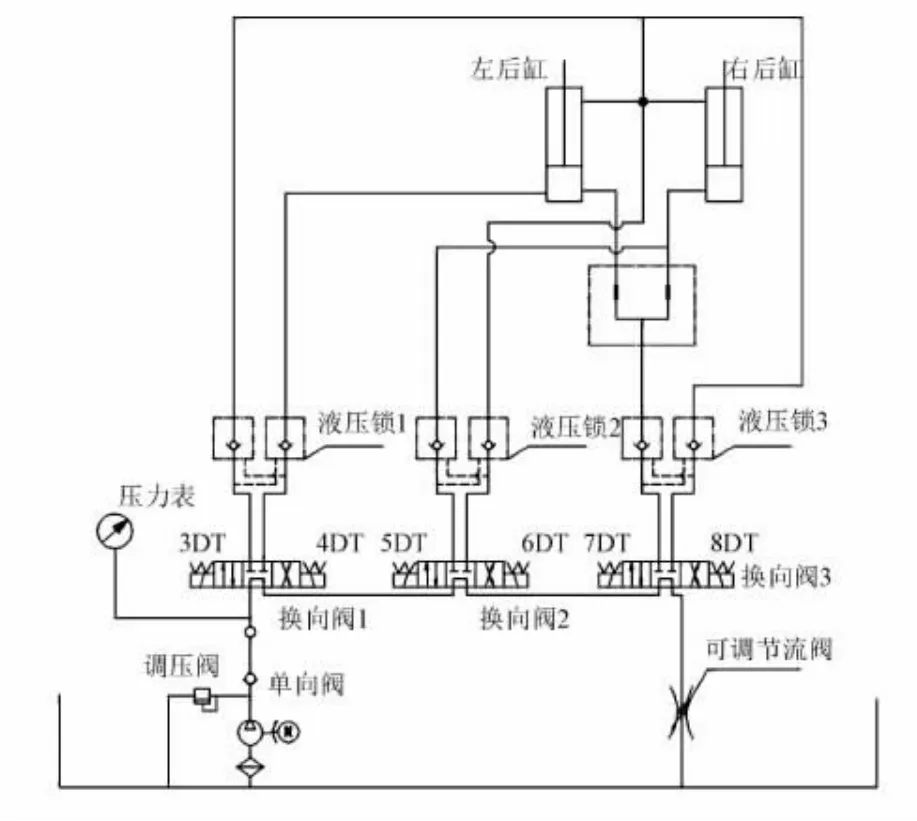
图5 独立控制与同步控制的后端液压原理
滑模机后端左右2个液压缸在滑模机工作过程中可实现同步提升、同步下降或完成独立升降。在双缸同步下降工进时,8DT通电吸合后三位四通电磁换向阀右位接通,液压油在液压泵作用下经单向阀、3个串联的三位四通电磁换向阀后,经双向液压锁右侧单向阀进入有杆腔,无杆腔内液压油由分流集流阀以等分流量经液压锁、三位四通换向阀后回油箱。滑模机需要调整同步上升时,液压缸在7DT通电吸合后三位四通电磁换向阀左位接通,液压油经油泵、3个三位四通换向阀后经双向液压锁进入分流集流阀等分流量进入双液压缸无杆腔,推动滑模机机体前端同步上升,有杆腔的液压油经双向液压锁后经三位四通换向阀流回油箱。液压系统油路2个方向分别有分流和集流作用,有效保证了2个液压缸在上升和下降时的同步运行,且同步精度较高。
当需要独立控制后端液压缸进行升降动作时,其工作过程为:液压泵将油箱中的油吸出,经过滤器过滤后压出,其中一路经过溢流阀调压后连接油箱,对系统具有调压功能,另一路经换向阀1后经过液压锁进入左后液压缸完成其升降;当3DT通电吸合后三位四通换向阀1左位接通,液压油经油泵、单向阀、换向阀1左位、液压锁至左后液压缸有杆腔,推动滑模机左后端下降;当4DT通电吸合后三位四通换向阀1右位接通,液压油经油泵、单向阀、换向阀1右位、液压锁至左后液压缸无杆腔,推动滑模机左后端上升。同理,换向阀2用来控制右后液压缸的升降。
4 滑模机模具高压水清洗系统
为了提高滑模机模具作业效果,滑模机在作业完成后需要进行及时清洗,然而滑模机一般是在野外作业,清洗作业不方便,特别是水源不好找。为此,本项目滑模机利用牵引拖拉机的动力,增加设计了模具高压水清洗系统,由动力传动装置、水泵、储水箱、水管、高压水枪等组成,如图6所示。
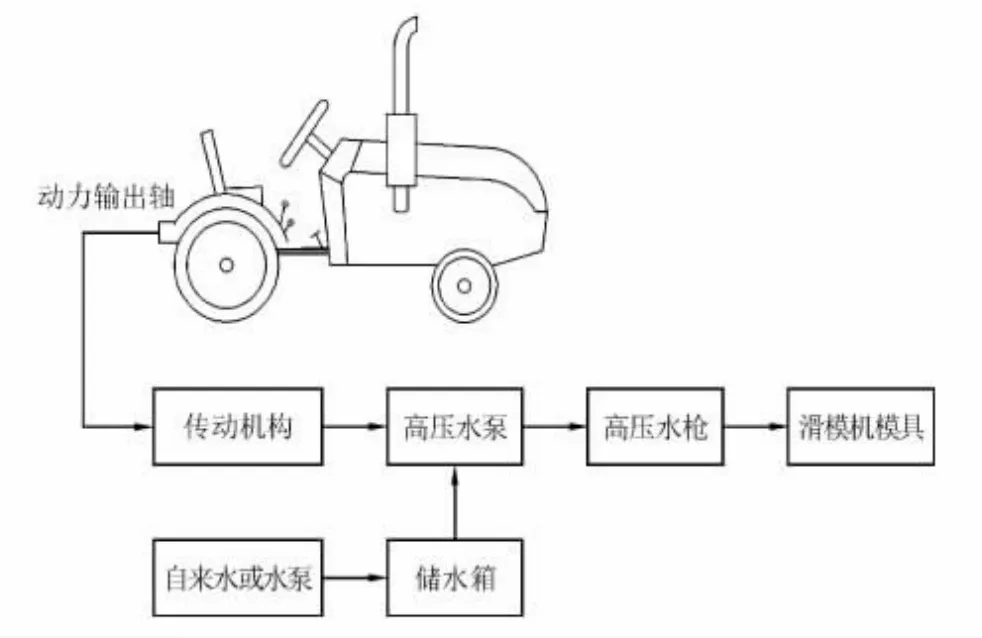
图6 滑模机模具高压水清洗系统的组成
5 电控-液压式自适应转弯系统
牵引式滑模机虽然结构简单、转场效率高、自适应好,但由于牵引拖拉机与滑模机体之间采用牵引连接,且具有一定的距离,因此在进行弯道施工作业时,滑模机随着牵引拖拉机的转弯而转弯,容易造成路缘石滑模路径偏差,从而影响滑模效果。牵引拖拉机距离模具越远,偏差就越大。为了能适应弯道路缘石滑模特点,采用了电控-液压式自适应转弯系统[18]。
电控-液压式自适应转弯系统主要由弯道转弯偏差传感器、弯道调整液压缸、流量控制阀、电液伺服阀、电子控制单元、弯道标线等组成,如图7所示。其基本的工作过程是:当滑模机进行弯道作业时,由安装在滑模机上的转弯偏差传感器检测弯度偏差,并将偏离信号传给电子控制单元(ECU),电控单元进行修正处理后,发出控制指令给液压系统电磁换向阀、伺服阀等,为液压缸提供动力,从而实现机组的自适应调整。
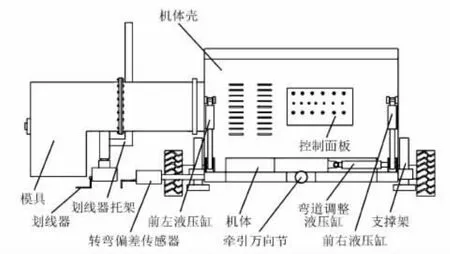
图7 电控-液压式自适应转弯系统的组成
6 样机作业试验
2014年9月在贵州省平坝县进行了样机应用,样机作业速度为2~14.5 m·min-1,转场速度快,达到了35 km·h-1,滑模作业效果如图8所示。本机与其他同类机型的性能参数比较如表1所示。

图8 矩形断面路缘石滑模作业效果
7 结语
为适应复杂的路缘石滑模机工作环境,同时考虑节约生产成本,本文开发设计了转场效率高、易清洗且价格适中的牵引式路缘石滑模机。四柱双缸并联同步液压系统提高了滑模机自适应高度调整的准确度;由牵引拖拉机动力输出轴提供动力的高压水清洗系统提高了滑模机组的使用方便性;电控-液压式自适应转弯系统,对弯道路缘石滑模作业具有很好的纠偏效果,提高了弯道作业质量,减小了弯道施工误差。本机采用通用的35马力四轮拖拉机作为牵引动力,在山区平直道路路缘石滑模作业的效果突出,效率提高3~5倍,转场速度提高到35 km·h-1。

表1 本机与其他同类产品技术经济指标对比
[1] 焦建民,张竹平,朱绍安,等.LCI型路缘石自动成型[J].筑路机械与施工机械化,1993,10(2):4-7.
[2] 张 华,肖小芬.YC15型路缘石滑模机[J].建筑机械化,1993(4):28-29.
[3] 赵国普,何慧国.路缘石滑模摊铺机在国内外的发展与应用[J].筑路机械与施工机械化,2009,26(11):16-20.
[4] 胡永彪,郑成波,康敬东,等.路缘石滑模施工设备及其施工技术的发展[J].筑路机械与施工机械化,2009,26(4):35-37.
[5] 胡永彪,何挺继,陈 蝶.我国筑路机械的现状与未来[J].筑路机械与施工机械化,1998,15(6):2-4.
[6] 晟 华.江苏四明SMC-522轮胎式滑模机[J].筑路机械与施工机械化,2009,26(11):32.
[7] 邢鹏飞.牵引式路缘石滑模摊铺机的设计与研究[D].秦皇岛:河北科技师范学院,2015.
[8] 张 奕.PC200路缘石滑模机关键技术研究[D].秦皇岛:燕山大学,2010.
[9] 晟 华.江苏四明SMC-522轮胎式滑模机[J].产品大观,2009(11):32.
[10] 郑成波.路缘石滑模机工作装置防粘技术研究[D].西安:长安大学,2009.
[11] 赵国普,徐宝国,周正明,等.水泥混凝土构造物滑模摊铺机自动控制系统[J].筑路机械与施工机械化,2015,32(7):90-94.
[12] 陈丹凤,徐宝国,宋爱国,等.智能化履带滑模机测控系统设计[J].测控技术,2013,32(7):95-99.
[13] 张金焕.PID控制系统和模糊自适应PID控制系统的研究及比较[J].武汉理工大学学报,2005,27(5):286-290.
[14] 刘莉宏.基于智能控制的PID控制方式的研究[J].北京工业职业技术学院学报,2012,11(2):33-38.
[15] 刘 飞.双缸四柱液压机同步控制系统仿真与研究[D].上海:上海工程技术大学,2016.
[16] 赵国普,于勤玲,徐宝国,等.路缘石水泥滑模摊铺机液压控制系统[J].筑路机械与施工机械化,2015,32(12):49-53.
[17] 林 涛,王 欣,贾剑锋.同步分流阀在全液压平地机上的试验研究[J].筑路机械与施工机械化,2008,25(5):52-54.
[18] 郑凯峰.四轴重型车辆电控液压全轮转向系统研究[D].北京:北京理工大学,2014.
Preliminary Design of New Slipform Curb Machine
CHEN Li-dong1,2,CHEN Xiu-hong1,WANG Wei-dong3,GUO Guang-liang4,LIU Rong-chang1,ZHANG Liang1,FENG Li-zhen1,LI Guo-fang1,2
(1.School of Mechanical and Electrical Engineering,Hebei Normal University of Science and Technology,Qinhuangdao 066600,Hebei,China;2.Agricultural Machinery Institute of Hebei Normal University of Science and Technology,Qinhuangdao 066600,Hebei,China;3.CITIC Bohai Aluminium Industries Holding Company Limited,Qinhuangdao 066000,Hebei,China;4.Qinhuangdao Kebo Engineering Machinery Manufacturing Co.Ltd.,Qinhuangdao 066604,Hebei,China)
In order to solve the problems of traditional curb construction method,such as timeconsuming,low efficiency and poor quality,the 35 hp tractor was used as the traction power,and the 18 kW engine was used as the driving force for slipforming.The combination of virtual design and prototype test was applied,and an adaptive height adjustment system,a four-column double-cylinder synchronous hydraulic system,a high-pressure water cleaning system and an adaptive turning system were designed for the new slipform curb machine.The experimental results show that the operating speed is 2 ~14.5 m·min-1,the transfer speed reaches 35 m·h-1,the slipforming surface is smooth and meets the design requirements,which can provide reference for the improvement of the new slipform curb machine.
curb;slipform paver;high-pressure cleaning system;adaptive adjustment
U417.4
B
1000-033X(2017)10-0106-05
2017-03-12
河北省高等学校科学技术研究重点项目(ZD2015029)
陈立东(1973-),男,河北唐山人,副教授,硕士,研究方向为机械创新设计与试验。
[责任编辑:王玉玲]