改进小波阈值法在MEMS陀螺随机误差分析中的应用
2017-11-29王辛望沈小林刘新生
王辛望,沈小林,刘新生
(1.中北大学计算机与控制工程学院,山西 太原 030051;2.江苏曙光光电有限公司,江苏 扬州 225009)
改进小波阈值法在MEMS陀螺随机误差分析中的应用
王辛望1,沈小林1,刘新生2
(1.中北大学计算机与控制工程学院,山西 太原 030051;2.江苏曙光光电有限公司,江苏 扬州 225009)
由于传统小波阈值去噪法在减小MEMS陀螺随机误差有很大的局限性,介绍一种改进阈值函数去噪法,通过调整阈值函数,克服传统方法的缺点和不足,从而减小MEMS陀螺随机误差,提高MEMS陀螺的精度。首先介绍传统阈值函数去噪法,然后基于传统阈值函数进行改进,提出一种新的阈值函数。采用改进后的方法对MEMS陀螺输出数据进行处理,并用Allan分析法比较传统方法与改进方法的效果。实验结果表明,角度随机游走(N)减少78.85%,零偏不稳定性(B)减小82.14%,角速率随机游走(R)减少92.53%,均值下降90.6%,均方差下降70%,信噪比增加26.43%,提高MEMS陀螺的精度。
随机误差;MEMS陀螺;阈值函数;小波阈值去噪;Allan方差;信噪比
0 引 言
微机电系统 (micro-electro-mechanical system)被提出后,自20世纪80年代以来微机械陀螺广泛应用于战术武器领域、民用领域及大量低成本惯导系统中[1]。与激光陀螺、光纤陀螺等传统陀螺相比较,微机械陀螺(MEMS)拥有体积小、高耐靠、价格低廉、功耗低等优点。然而微机械陀螺的精度较差,误差类别相对较多,会导致惯导系统的精度受到较大的影响,极大限制了微机械陀螺的发展。因此,如何减小它的随机误差以及提高其精度成为讨论重点[2]。
文献[3]仅提出了硬、软阈值去噪法,但没有对硬、软阈值去噪法进行改进,文献[4]采用小波分析法对MEMS陀螺随机误差进行了分析,但是只进行了滤波前后的方差对比,并没有比较Allan方差辨识出的误差系数,文献[5]虽然提出了半软阈值法、软硬阈值折衷法和多项式插值法等方法,但是没有解决阈值函数在平滑方面以及去噪后信号特征方面具有很多缺点。为了解决以上方法对改善MEMS陀螺随机误差的局限性,提出一种新阈值函数,相比于传统阈值函数,改进的阈值函数高阶可导,既克服了硬阈值函数不连续的劣势,又缩小了软阈值函数的估计小波系数与分解小波系数之间的恒定偏差。运用改进后的方法与传统方法对信号去噪后的效果对比,而且通过Allan方差辨识出的误差系数相互比较,证明了改进后此法的可行性和有效性。
1 改进的小波阈值去噪法
1.1 小波阈值去噪法
小波阈值去噪法的思想即对小波分解后的各层系数中模大于或者小于阈值的系数进行计算,再根据计算得出小波系数进行反变换,重构处理后的信号。小波阈值去噪拥有简便、运算量不大、滤波程度最佳等特点,因此普遍应用于工程实践中[6-7]。其去噪步骤如图1所示。
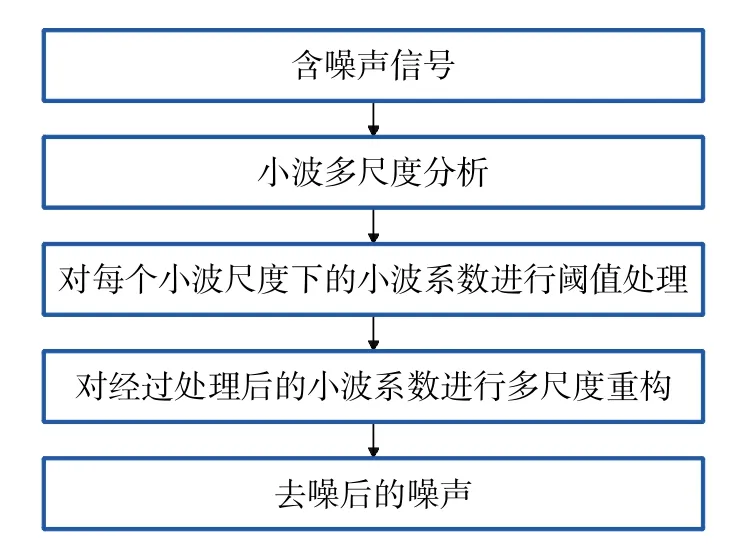
图1 小波阈值去噪法步骤
一般主要使用硬阈值和软阈值法,其阈值函数依次是式(1)、(2)。 其中wj,k和i,j分别是去噪前后小波变换系数,sign(·)是符号函数,阈值为噪声程度的预计值,N是信号的长度[8]。
硬阈值函数:

软阈值函数:

1.2 软、硬阈值法的局限性
软、硬阈值函数法的核心是阈值的设置,不一样的阈值产生不同的效果。根据实际工程和以往经验,两种方法都有一定的劣势。硬阈值法仅保留了大部分小波系数,却将另外一小部分的系数直接取零,造成滤波后系数在阈值位置有间断点,重构时会造成信号的震荡,而软阈值法把大部分小波系数使用缩小变换,不会影响其间断性,但滤波后的系数在i,j以及|wj,k|之间有一定的偏差λ,会改变重构信号与原始信号之间的逼近程度[9]。硬阈值法在均方差上更优于软阈值法,但是所得到的估计信号会产生一定的震荡,在光滑度上与原始信号存在一定的差异。同时,两种方法皆把小于阈值的系数直接取零,把混叠在噪声频谱中的有效信号彻底去除,势必使重构信号与原始信号之间有恒定的误差[10]。
1.3 改进的小波阈值去噪法
为了解决传统阈值函数的劣势,介绍一种改进小波阈值算法。改进的阈值函数为

改进后的阈值函数在软、硬阈值函数中能够随意选择,任意调整参数c、d,获得合适的阈值函数。它是以i,j=wj,k为渐近线,随着wj,k的增大,i,j逐渐靠近wj,k,减小了i,j和wj,k之间的误差。 另外,改进后函数不但在c、d取任何值时具有连续性,而且参数d可以选用更多的值[11]。同时,改进后函数高阶可导,有利于各种运算处理,因而改进后的方法比传统方法具有相当多的优势。
2 Allan方差分析法
Allan方差在1960年前后由David Allan首先提出,初期应用于分析振荡器的稳定性。此后由于其作为频率稳定度的时域分析方法,容易获得和辨识出各种随机误差源的统计特性,因此1971年被IEEE正式推荐并用于陀螺仪随机误差的建模。
假定MEMS陀螺以时间间隔t0采集一段时间,共收集到N个数据,将N个采样点分为P组,每组共有n个采样点,其中n<(N-1)/2。每一组持续时间t=nt0称为相关时间,则每一组的平均值:

Allan方差定义:

其中<·>表示求整体的平均值。
对于不同的相关时间t,可求得对应的Allan方差,Allan方差的平方根σAllan(t)一般称为 Allan标准差,至此获得一系列的点对ti~σ^2Allan(ti)或ti~σ^Allan(ti),i=1,2,3,…。
综上,该方差法可以分离、辨识、量化数据中各种噪声,如表1所示。

表1 功率谱与Allan方差的对应关系
根据分布在不同频段噪声的不同特性,将MEMS陀螺随机误差的噪声归为量化噪声Q、角度随机游走N、零偏不稳定性B、角速率随机游走R和速率斜坡K。不同的噪声分布在不同的t区域里,5类不同的噪声项Q、N、B、R、K在Allan方差图中依次表现为-1,-1/2,0,1/2,1 斜率的直线如图 2 所示[12-14]。

图2 Q、N、B、R、K的Allan方差分布图
因此根据5类噪声的上述特点,可以拟合成式(5)。一般来说,方差比较小,不易于比较,因此拟合成标准差不仅可以提高精度,还便于表示,可化简为

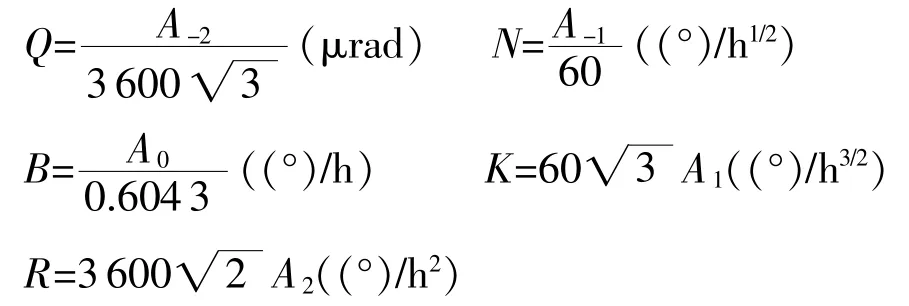
根据最小均方定义,拟合函数σAllan(t),可以得出拟合函数An,然后根据上述公式可以计算出5类噪声的估计值,依次为
3 随机漂移误差的分析
3.1 静态数据采集
试验采用某型MEMS陀螺,将其采样频率设为100Hz并水平放在温箱中固定,确保试验在恒温恒湿的条件下进行。首先先将陀螺通电预热1h,保证其稳定运行后,以100Hz连续采集2h,重复上述过程连续采集5d,取其中一次比较好的20min数据作为样本,获得陀螺的静态输出,共采集到120000个数据样本如图3所示。
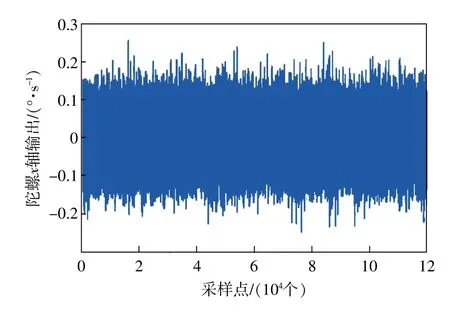
图3 陀螺原始数据
3.2 实验结果与讨论
首先,分别用传统去噪法以及改进后的方法对原始数据处理,小波基选择db4,分解层数选择5,根据阈值计算公式,λ=0.26,对于改进的阈值法,经过多次试验,a=8500,b=13。改进前和改进后的去噪效果图分别如图4~图6所示[14-15]。对比可看出,硬阈值和软阈值去噪法并不理想,硬阈值法波形不仅有一定波动而且比较粗糙;软阈值法虽然波形比较平滑,但是滤波后准确度较差,可能会遗失重要信息。改进后的波形较为光滑,重构精度较高,结果更明显[16]。
其次,通过Allan方差对数据解析,获得Allan方差辨识得误差系数。一般来说,方差相对较小,不利于对比,所以拟合成Allan标准差与相关时间的双对数曲线。

图4 硬阈值法
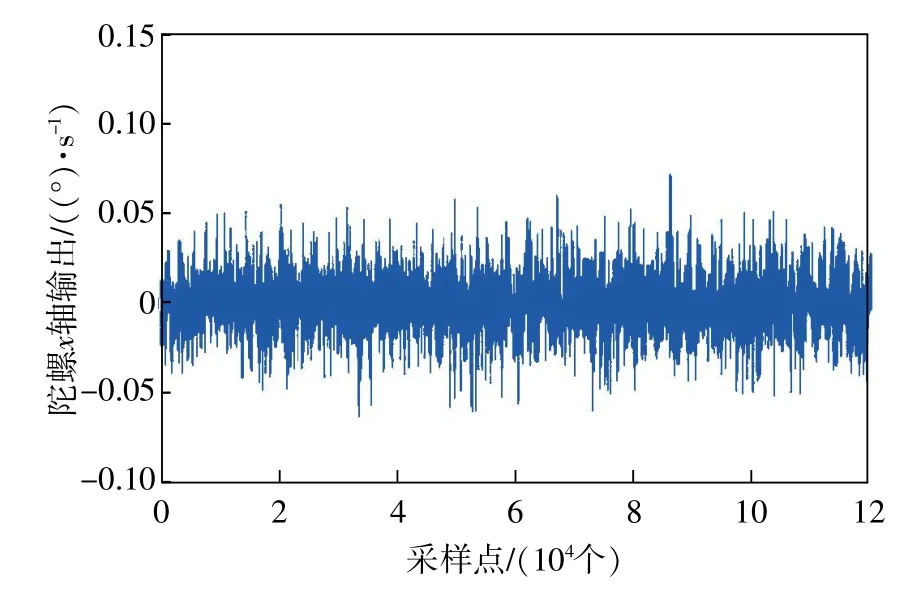
图5 软阈值法
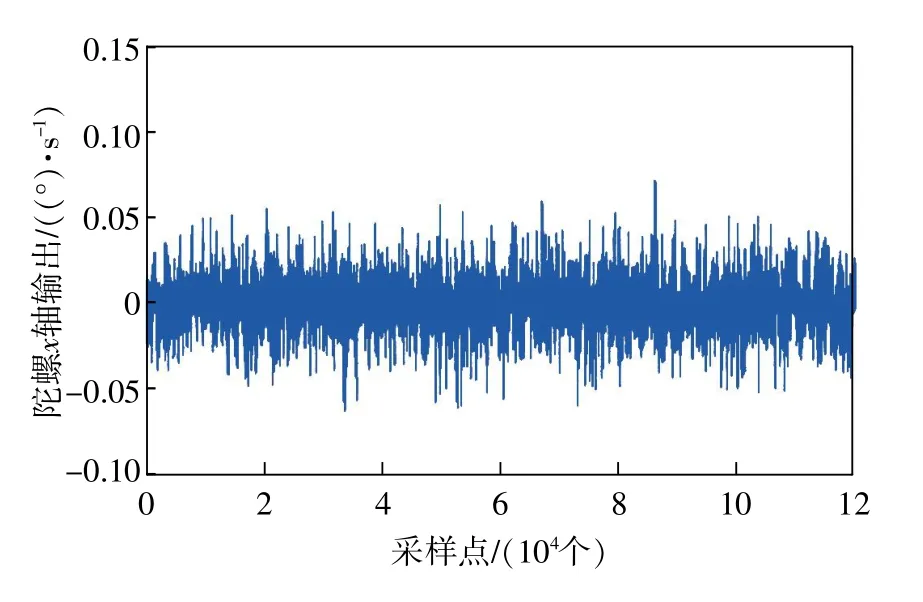
图6 改进的阈值函数法

表2 Allan方差法辨识误差系数

图7 原始数据Allan标准差双对数曲线
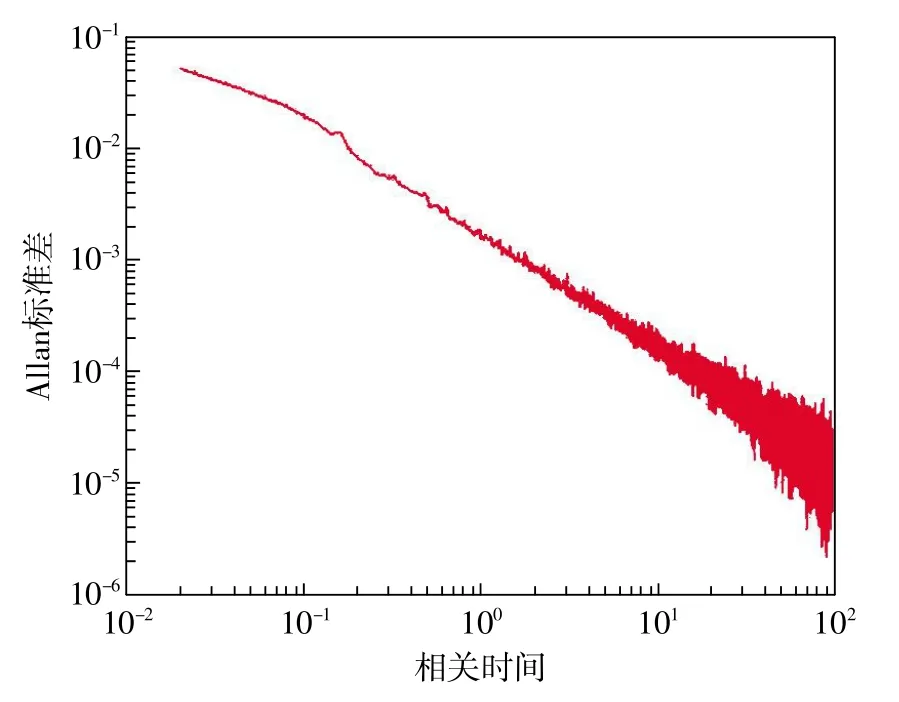
图8 硬阈值法Allan标准差双对数曲线
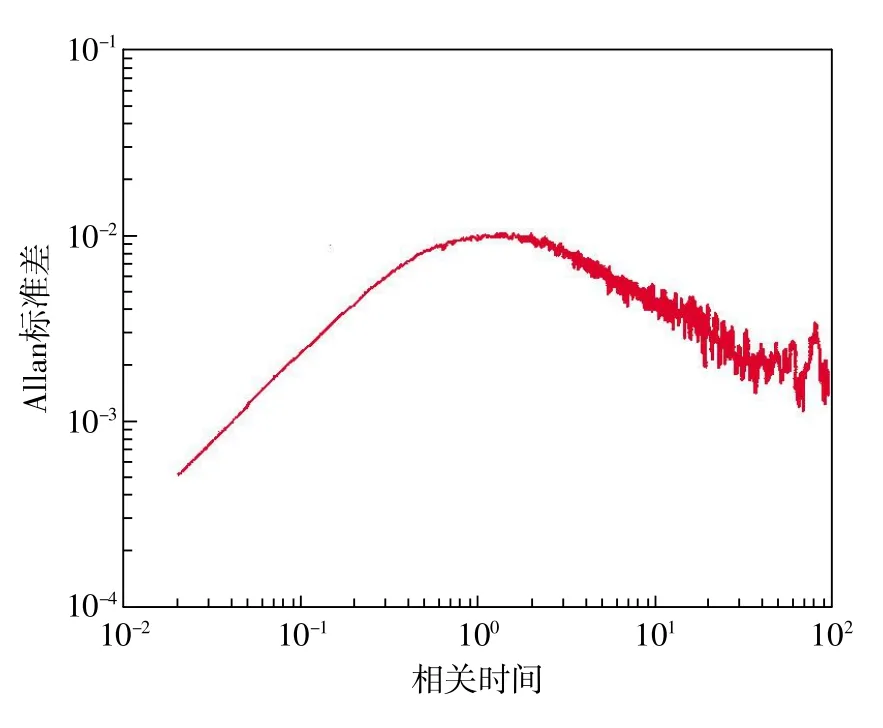
图9 软阈值法Allan标准差双对数曲线
从图中和表2中可以看出,对比5类误差系数,量化噪声(Q)和速率斜坡(K)没有明显变化,而角度随机游走(N)、零偏不稳定性(B)、角速率随机游走(R)的改变较为明显,特别是提出的改进后的方法,N、B、R皆有明显改善。此外,3种方法的均值如表3所示,根据表中的数据可以看出,改进后的方法明显比传统方法在均值的对比上更占有一定优势。因此改进后的方法可以明显增强MEMS陀螺性能。
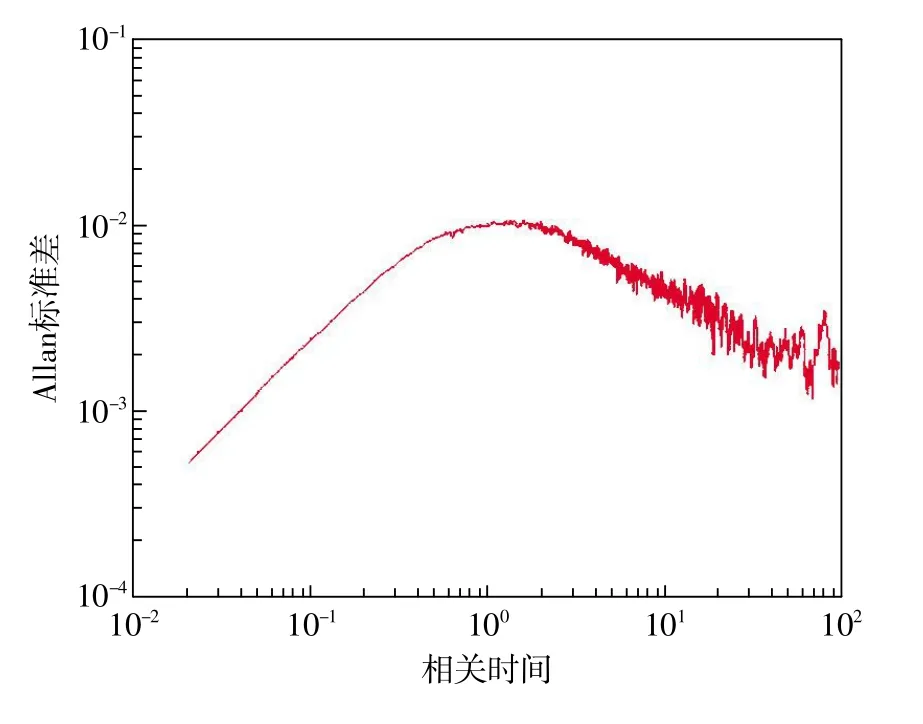
图10 改进的阈值函数法Allan标准差双对数曲线

表3 均值对比
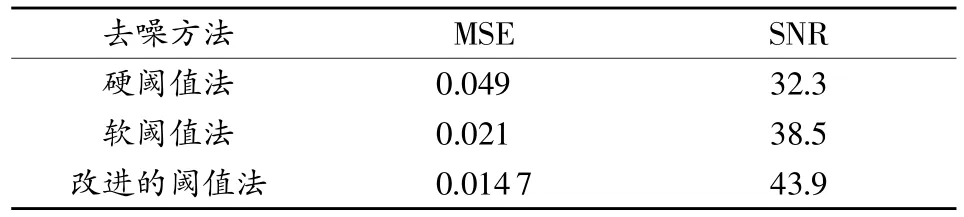
表4 均方差和信噪比对比
为了再一次验证改进的阈值函数法的可用性,计算并对比了3种方法去噪前后信噪比和均方差。针对带有噪声的信号,处理后的信噪比越大,均方差越小表明去噪结果更优。从均方差和信噪比对3种方法进行分析,由表4可见改进的方法优于其他方法[16]。
4 结束语
通过常用小波阈值去噪法分析,根据工程以及实际需要,介绍一种改进的阈值函数,采用几种方法对MEMS陀螺随机误差进行分析。实验结果证明,角速度随机游走减少78.85%,零偏不稳定性减小82.14%,角速率随机游走减少92.53%,均值下降90.6%,均方差下降70%,信噪比提高26.43%。改进后的方法较传统方法可以显著减少MEMS陀螺的随机误差,解决了其精度低的难题。
[1]刘俊,石云波,李杰.微惯性技术[M].北京:电子工业出版社,2005:25-128.
[2]严恭敏,李四海,秦永元.惯性仪器测试与数据分析[M].北京:国防工业出版社,2012:20-135.
[3]DONOHO D L,JOHNSTONE I M.Adapting to unknown smoothness via wavelet shrinkage[J].Journal of the American Statistical Association,1995,90(432):1200-1224.
[4]吉训生,王寿荣.小波变换在MEMS陀螺仪去噪声中的应用[J].传感技术学报,2006,19(1):150-152.
[5]郭晓霞,杨慧中.小波去噪中软硬阈值的一种改良折衷法[J].智能系统学报,2008,3(3):222-225.
[6]周伟.基于Matlab的小波分析应用[M].西安:西安电子科技大学出版社,2010:55-107.
[7]曹威,孙晓云,程恩,等.改进阈值去噪法在锚杆参数检测中的应用[J].中国矿业,2016,25(8):130-134.
[8]任重,刘莹,刘国栋,等.改进的小波双阈值双因子函数去噪[J].计算机应用,2013,33(9):2595-2598.
[9]GAN Y, SUI L, WU J, et al.An EMD threshold denoising method forinertial sensors[J].Measurement,2014,49(1):34-41.
[10]李红延,周云龙,田峰,等.一种新的小波自适应阈值函数振动信号去噪算法[J].仪器仪表学报,2015,36(10):2200-2206.
[11]王宏强,尚春阳,高瑞鹏,等.基于小波系数变换的小波阈值去噪算法改进[J].振动与冲击,2011,30(10):165-168.
[12]宋吉磊,吴训忠,郭铃.基于Allan方差法的微机械陀螺误差分析[J].导弹与航天运载技术,2014(2):15-17.
[13]宋海宾,杨平,徐立波.MEMS传感器随机误差分析及处理[J].传感技术学报,2013(12):1719-1723.
[14]刘晓光,胡静涛,高雷,等.基于改进小波阈值的微机械陀螺去噪方法[J].中国惯性技术学报,2014,22(2):233-236.
[15]DONG Y,YI X.Wavelet denoising based on four improved functions for threshold estimation[J].Journal of Mathematics,2006,26(5):473-477.
[16]吴光文,王昌明,包建东,等.基于自适应阈值函数的小波阈值去噪方法[J].电子与信息学报,2014,36(6):1340-1347.
(编辑:刘杨)
Application of improved wavelet thresholding method for analysising MEMS gyroscope random error
WANG Xinwang1, SHEN Xiaolin1, LIU Xinsheng2
(1.School of Computer and Control Engineering,North University of China,Taiyuan 030051,China;2.Jiangsu Shuguang opto-electronics Co.,Ltd.,Yangzhou 225009,China)
Because the traditional wavelet threshold de-noising method has limitations in reducing the random errorof MEMS gyroscope, thispaper introducesan improved threshold function de-noising method, by adjusting the threshold function, to overcome the shortcomings of traditional methods,so as to reduce the random error and to improve the accuracy of MEMS gyroscope.The traditional threshold function de-noising methods have been introduced first,and then the methods have been improved,a new threshold function has been proposed.The new method and Allan analysis are used to analyze the random error of MEMS gyroscope and compare to the effect of these methods.Experimental results indicate that the angular random walk is reduced by 78.85%,the bias instability is reduced by 82.14%,the rate random walk is reduced by 92.53%,the average is declined 90.6%,average variance is decreased by 70%,the SNR is increased by 26.43%and the accuracy of MEMS gyroscope is improved.
random error; MEMS gyroscope; threshold function; wavelet threshold de-noising;Allan variance;signal-noise ratio
A
1674-5124(2017)11-0026-05
10.11857/j.issn.1674-5124.2017.11.006
2017-03-09;
2017-05-04
王辛望(1991-),男,河北石家庄市人,硕士研究生,专业方向为控制理论与控制工程,导航、制导与控制。
