基于贝叶斯压缩感知的定位算法研究∗
2017-11-28李文浩张旭东
李文浩 张旭东
(中国船舶重工集团公司第七一五研究所 杭州 310023)
基于贝叶斯压缩感知的定位算法研究∗
李文浩 张旭东
(中国船舶重工集团公司第七一五研究所 杭州 310023)
随着物联网时代的到来,人们对基于位置的服务的需求越来越大,尤其是GPS无法进行有效定位的区域,比如室内和水下。水下环境异常负责,通过对室内定位算法的研究,对于未来进一步研究水下探测技术有重要意义。论文采用将新兴的贝叶斯压缩感知理论引入到室内定位算法中,它比传统的压缩感知定位算法更加精确、高效、抗噪性更好。该文通过仿真实验进行了证明。
贝叶斯压缩感知;位置指纹定位;RSSI;压缩感知
1 引言
无线传感器网络(Wireless Sensor Networks,WSN)需要对各种环境中的监测对象进行实时监测、位置感知和信息采集,必须要有定位技术的支持。
在陆地,室内定位技术应用广泛,如建筑物发生火灾、人质挟持,矿井发生瓦斯爆炸、地质塌陷等,地震、泥石流等自然灾害后进行灾后救援。
除了通过将传感器搭载在平台上散布于陆地进行环境探测之外,未来探测技术的重点发展方向之一是将水听器、浮标等传感器形成分布式水下网络。
水下无线传感器网络[1]目前正在被广泛应用于海洋环境探测,特别是在军事领域的研究已经成为各国抢占的技术制高点之一。新型的水下无线传感网络不再只是简单的水声网络,而是一种将水声、静电场、磁场等融为一体的具备综合性的物理网络,集军事侦察、战略戒备、水声信息通信、舰船导航、水下目标定位与攻击的综合作战系统。
无论是陆地,还是水下,定位技术影响着普通老百姓的生产生活方式,更是一种大国之间博弈的全球战略。
目前发展比较成熟的室内定位技术中基于射频识别(Radio Frequency Identification,RFID)的室内定位技术[2]定位精度高、技术成本低、工作效率高,具有非接触、非视距的特点,是室内定位的首选技术。
LF定位法包括离线位置指纹库构建和在线匹配定位两个阶段。离线阶段的主要工作是根据待定位区域内散布的不同参考点接收的信号强度值,构建一个能准确体现各位置特征的位置指纹库[4],作为实施有效室内定位的基础。在线定位阶段是LF定位法的核心,应用于此的算法颇多,近年来有学者将压缩感知(Compressed Sensing,CS)[5]理论引入到室内定位算法中,将定位问题转化为稀疏信号的重构问题,并被证明是定位精度相对较高的算法之一。特别是在此基础上发展而来的基于贝叶斯压缩感知(Bayesian Compressed Sensing,BCS)的定位算法,它比传统的压缩感知定位算法更加精确、高效、抗噪性更好。本文主要研究LF定位法的在线定位阶段,并就基于BCS的定位算法进行分析,最后通过仿真实验验证。
2 基于贝叶斯压缩感知理论的定位算法
近年来,众多新型的CS理论如雨后春笋般涌现出来,具有代表性的主要有贝叶斯压缩感知(Bayesian Compressed Sensing,BCS)[6-7]、分布式压缩感知(Distributed Compressed Sensing,DCS)[8]等,其中以BCS为最热门的研究方向,应用最为广泛,这种运用统计学思想解决CS重构问题的理论,应用在室内定位中,相比传统的CS理论,具有精度更高、速度更快的特点。
BCS理论是由Shihao Ji等提出的,BCS理论解决问题的基本思想是为CS的恢复问题建立了一个贝叶斯框架,将贝叶斯思想融入到CS理论中,通过统计学解决问题的新视角来重新对待传统CS理论的信号重构问题。
基于BCS理论进行室内位置指纹定位[9],具体流程如图1所示。

图1 基于BCS的室内定位流程图
将定位区域划分成N个网格,假设该区域的阅读器RD的数量为Z,移动标签的数量为T。网格表示的位置信息与N×1维的位置信号向量s中的元素相互对应,如果s中的元素是1,表示此时所对应的网格点处是有移动标签即待定位目标存在;如果s中的元素是0,表示此时所对应的网格点处没有移动标签即待定位目标存在。离线阶段建立的位置指纹库ψ表示形式如下:其中,ψi,j表示各阅读器RDi接收到所划分的各网格中心点处WGj的信号强度值的平均值,其中

在线阶段也就是运用算法达到定位目的的阶段,在此过程中,根据移动标签处的无线信号强度值精确求解出各待定位目标所在的位置。
原始信号值 xi∈RZ( )i=1,2,...,Z 表示第i个RD接收到的信号强度值,xi可以表示为位置指纹库ψi与位置信号向量si相乘的形式,xi也就是接收到的信号强度值:

考虑到实际定位区域存在噪声,则测量值可以表示为

其中,φi表示一个标准高斯观测矩阵,φi∈RM×Z;表示的是一个高斯噪声,其均值为0,方差为;Θi表示一个M×N的等效矩阵。
然后,利用压缩采样得到的测量值yi、离线阶段构建的位置指纹库ψi和观测矩阵φi,通过以贝叶斯压缩感知重构算法为基础的定位算法就可以计算出待定位目标的位置信号向量si。位置信号向量si中非零值元素对应哪些网格,那么这些网格对应的就是无线终端所在的位置,进而实现了有效定位的目的。
基于BCS的定位算法步骤可以归纳如下:输入:等效矩阵Θ、测量值y。
输出:位置信息向量s、均值u和方差∑。
初始化:首先初始化一个基函数Θ1,指定其超参数ξ1如式(4)所示。并设其它所有超参数ξi为无穷大,ξ0=0.01×var(y),λ=0,迭代次数 t=1,设定初始观测值数目M=M0。

Step1选择候选的基函数Θi。
Step2计算对应的稀疏因子αi和量化因子βi。

1)如果 βi2-αi>ω且 ξi=∞ ,则增加基函数 Θi到当前模型中,并按照式(7)更新超参数;
2)如果 βi2-αi>ω 且 ξi<∞ ,表示模型中已经存在基函数Θi,并按照式(7)更新超参数;
3)如果 βi2-αi≤ω 且 ξi<∞ ,则将基函数 Θi从模型中删除,并令ξi=∞。
Step3更新均值u和方差∑,方差∑的对角线元素的均方根被称为误差条。

Step4如果平均的误差条大于预设误差条的值Νe,则测量数目加1,M=M+1,如果平均的误差条小于预设误差条的值Νe,则测量数目减1,M=M-1。
3 基于BCS和CS的信号重构仿真实验
仿真实验中,选取CS重构算法的两种代表性算法:贪婪算法的典型算法——正交匹配追踪(Orthogonal Matching Pursuit,OMP)[10]算法和凸松弛算法的典型算法——基追踪(Basis Pursuit,BP)[11]算法与BCS进行对比实验。
在主频分别为3.40GHz和3.39GHz的Intel i3双核CPU的PC机上,利用Matlab 7.1平台对一个一维的单元脉冲信号进行了信号的重构对比实验,取信号长度为N=512,其中包含了M=20个峰值,测量值为K=100,峰值所在的位置通过均匀分布的方式进行随机化选取,峰值为±1,噪声信号符合N(0 , 0.0052)。
实验中,分别运用OMP、BP和BCS对该信号进行重构,结果如图2所示,可以看出BCS的性能方面更加稳定,重构效果更好。图2(a)表示原始信号,图2(b)表示OMP重构所得的结果,图2(c)表示BP重构所得的结果,图2(d)表示BCS重构所得的结果。
最后比较各重构算法的平均误差值及运算时间,如表1所示。通过比较可知,BCS相比BP、OMP重构精度更高,运算时间虽然略长于OMP,但运算速度却远远快于精度较高的BP算法,可以较好地解决求解精度和运算速度之间的矛盾。
4 基于OMP和BCS的定位仿真实验
实验场景假设为一个6m×6m的室内区域,实验中采用了4个阅读器与9个参考标签,仿真布局图如图3所示,信号强度值采用无线信号传播损耗模型公式计算获得。由于BP的复杂度较高、运行时间较长,不适合实时定位,因此选用OMP与BCS进行定位仿真实验,结果如图4所示。
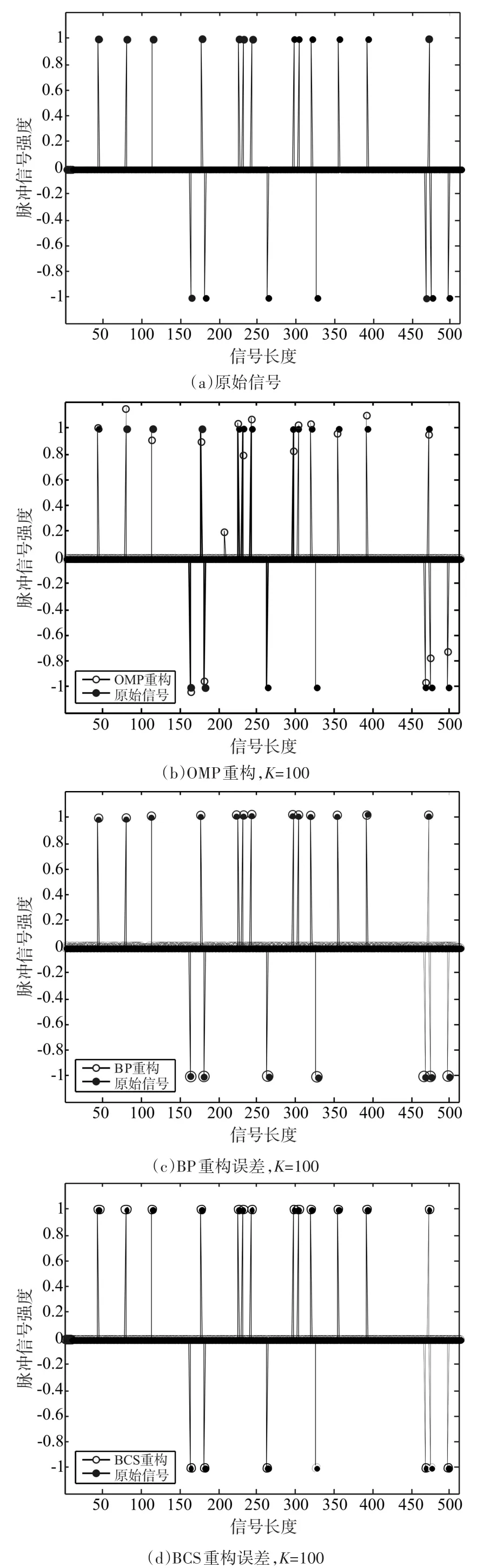
图2 BCS与BP、OMP重构结果对比图
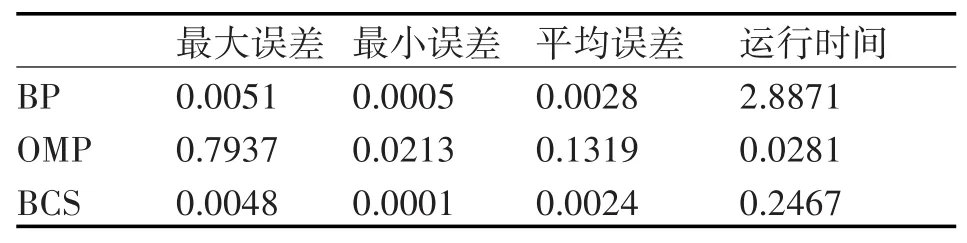
表1 BP、OMP和BCS重构结果的部分性能参数比较表
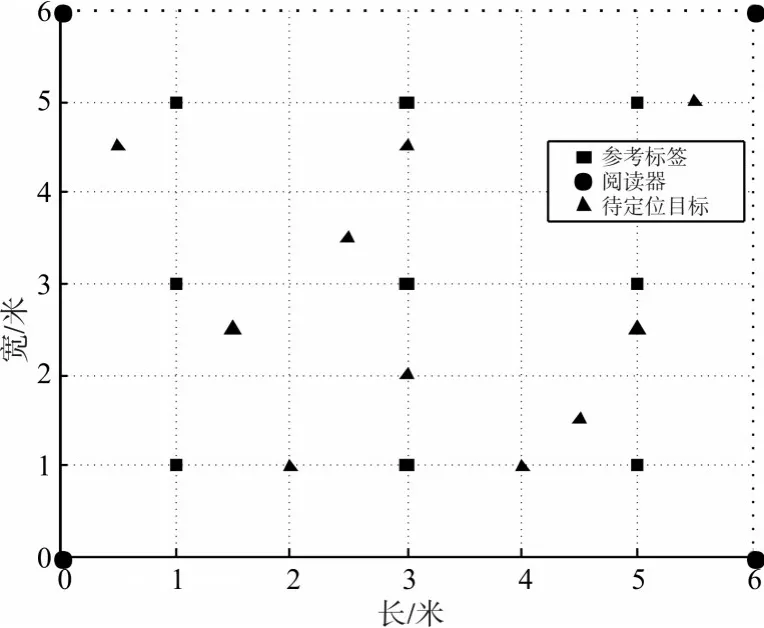
图3 定位实验仿真布局图
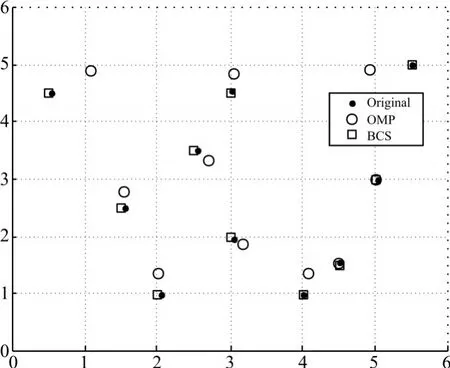
图4 BCS与OMP仿真实验定位对比图

表2 BCS和OMP定位结果的部分性能参数比较表
通过仿真实验可以看出,BCS相比OMP虽然运算时间略有增加,但定位精度显著提高,更符合室内定位的实际要求。
5 结语
本文详细阐述了基于BCS理论的室内位置指纹定位算法。并通过仿真实验证明了BCS用于室内定位的可行性及优越性。
通过对室内定位算法的研究,相信对于未来进一步研究水下探测技术具有重要意义。
[1]王静,陈建峰,张立杰,等.水下无线传感器网络[J].声学技术,2009,28(1):89-95.
[2]李丽娜,马俊,徐攀峰,等.RFID室内定位技术研究综述[J].计算机应用与软件,2015,32(09):1-3,96.
[3]石欣,印爱民,陈曦.基于RSSI的多维标度室内定位算法[J].仪器仪表学报,2014,(02):261-268.
[4]李文浩,李丽娜,徐攀峰,等.基于矩阵填充的室内定位位置指纹库构建[J].辽宁大学学报(自然科学版),2015,42(4):325-329.
[5] DONOHO DL.Compressed sensing[J].IEEE Transactions on Information Theory,2006,52(4):1289-1306.
[6]JI SHIHAO,XUE YA,CARIN LAWRENCE.Bayesian compressive sensing[J].IEEE Trans Signal Processing,2008,56(6):2346-2356.
[7]甘伟,许录平,苏哲,等.基于贝叶斯假设检验的压缩感知重构[J].电子与信息学报,2011,33(11):2640-2646.
[8]胡海峰,杨震等.无线传感器网络中基于空间相关性的分布式压缩感知[J].南京邮电大学学报(自然科学版),2009,29(6):12-16.
[9]吴哲夫,许丽敏,陈滨,等.基于贝叶斯压缩感知多目标定位算法[J].哈尔滨工程大学学报,2014,35(10):1282-1287.
[10]Tropp J,Gilbert A.Signal recovery from random measurements via orthogonal matching pursuit[J].IEEE Transactions on Information Theory,2007,53(12):4655-4666.
[11]Chen S B,Donoho D L,Saunders M A.Atomic decomposition by basis pursuit[J].SIAM Journal on Scientific Computing,1998,20(1):33-61.
Positioning Technology Research Based on Bayesian Compressed
LI WenhaoZHANG Xudong
(The 715th Research Institute of China Shipbuilding Industry Corporation,Hangzhou 310023)
With the advent of the era of Internet of things,people's demand for location-based services is growing,especially for areas where GPS can not be effectively positioned,such as indoor and underwater.It is important to study the indoor location algorithm,which is of great significance for further study of underwater detection technology in the future.In this paper,the new Bayesian compressed sensing theory is introduced into the indoor localization algorithm.It is more accurate,efficient and better than the traditional Compressed Sensing algorithm.This paper proves it by simulation experiment.
Bayesian compressed sensing,location fingerprint localization,RSSI,compressed sensing
Signal Strength Indication,RSSI)[3]方法是基于RFID的定位技术中被广泛采用的一种,具有实现简单、成本低、无需同步机制等优点。基于RSSI的室内定位算法主要包括几何定位方法及基于场景分析的定位方法两种。其中,基于RSSI的几何定位方法如三边定位法、质心法等,算法原理简单,实现容易,但受多径效应影响较显著。典型的场景分析法为位置指纹(Location Fingerprint,LF)定位法,是一种将无线信号强度作为场景特征进行室内定位的方法,该方法具有定位精度高、受室内环境因素影响小、稳定性好、通信开销小、实现灵活等特点,是当前最热门的室内定位算法,应用广泛。
TP301.6
10.3969∕j.issn.1672-9730.2017.10.011
Class Number TP301.6
2017年4月6日,
2017年5月27日
李文浩,男,硕士,助理工程师,研究方向:控制系统设计、信号处理。张旭东,男,硕士,助理工程师,研究方向:水声信号处理。
