基于虚拟仪器的导航控制实验教学平台设计
2017-11-24王玲玲,富立
王玲玲,富立

摘要:为了丰富导航专业课程设计和综合实验的教学内容,设计了导航控制一体化的单旋翼飞行器综合实验教学平台,并采用虚拟仪器搭建了该实验教学平台的数据分析和导航控制程序。基于该实验教学平台新增了嵌入式导航算法设计、PID和抗扰动控制算法比较等实验教学内容,取得了较好的教学效果。
关键词:虚拟仪器;导航控制;实验平台;综合实验
中图分类号:U666.1 文献标志码:A 文章编号:1674-9324(2017)48-0277-02
一、引言
课程设计和综合实验是北航自动化专业本科实践教学的重要环节。近几年,在校、院、系各级领导关怀和大力支持下,教学过程冲破传统观念束缚,结合专业特点进行了大胆探索,注重多学科之间的融合,研制了基于虚拟仪器的单旋翼无人飞行器导航控制实验平台,将惯性信息、导航与控制融为一体,既丰富了课程设计和综合实验内容,又实现了学生与实验对象之间的交互式操作,为提高学生的创新实践能力奠定了基础[1-4]。
二、单旋翼无人飞行器导航控制实验平台结构分析
考虑到单旋翼无人飞行器导航控制实验平台在教学过程中的具体应用,为了提高实验平台的运行效率,将其分为了两部分:空中部分和地面控制系统部分,如图1所示。
其中空中部分为单旋翼无人飞行器本体,主要包括碳纤维材质的飞行器框架、惯性测量组件、电机、马达、驱动器等;地面部分主要是基于虚拟仪器开发的具备可重复编程、实时监测飞行器状态、灵活可靠的地面控制系统,包括数据采集设备、PWM输出设备、无刷电机控制器等。空中和地面部分之间的通信通过Wifi无线传输实现。
三、基于虛拟仪器的控制系统设计
1.虚拟仪器功能与应用。利用LABVIEW可为用户提供灵活交互的可编程界面,单旋翼无人飞行器导航控制实验平台的地面控制系统采用了NI-9401,NI-9474和NI CRIO-9074,分别作为无人飞行器信号采集卡、PWM 输出卡和远程飞行控制卡。其中作为地面控制系统主要部件的NI CRIO-9074控制器由CompactRIO套件组成,包括嵌入式实时控制器、底层FPGA开发包和丰富的I/O端子,分别可通过基于主机的LABVIEW图形化编程语言操作。为了提高无人机中传感器的数据采样率及信息预处理效率,采用底层FPGA模块实时采集相关信息并处理。
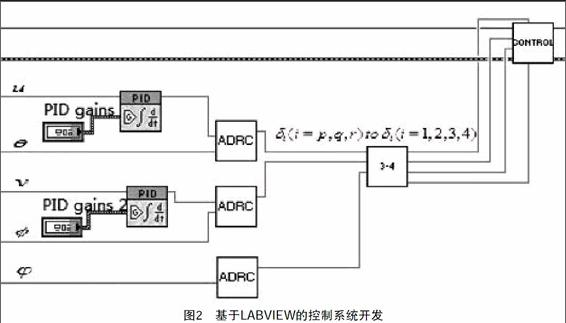
2.基于LABVIEW的控制系统实现。虚拟仪器构建的地面控制系统除了完成惯性信息的采集和处理外,还需要实现对空中无人飞行器的控制。因此,需要通过Labview编程实现控制算法,并通过无线传输方式控制飞行器的运行状态。在建立无人飞行器动态模型基础上,设计了基于PID和抗扰动控制器相结合的旋翼无人机姿态控制算法如图2所示:
通过在线调节控制系统的增益参数可实现对旋翼无人机的稳定控制。可视化程序及在线调试方式增强了学生的直观性认识,为学生对比不同控制算法的控制效果提供了有利条件。
四、应用情况及改进
导航控制的专业实验项目之前比较单一化,主要是以捷联导航算法的验证为主,并未与控制领域知识点相衔接。基于虚拟仪器的单旋翼无人飞行器导航控制实验平台的应用,在涵盖以前所有专业实验项目的基础上,不仅丰富了专业实验教学内容,关键是实现了信息处理、导航、控制学科间的融合,增开了嵌入式导航算法的设计与实现、控制方法的在线调试与设计、无人飞行器悬停控制方法的比较等多项专业综合实验,极大地激发了学生的实验兴趣,使更多的学生在创新思维、创新能力方面得到锻炼。目前该实验平台已经在导航专业课程设计与综合实验中为三届学生提供了便利,获得学生的一致好评。作为新开发的实验设备,该实验平台在目前的教学过程中已初见成效。考虑到未来的发展趋势,此后将研制多套单旋翼无人飞行器导航控制实验平台,实现单旋翼无人飞行器群之间的协同控制。
参考文献:
[1]王文花.深化实验教学改革的途径[J].实验室研究与探索,2005,24(6):11-13.
[2]谢新开.自动化专业综合实验教学改革探析[J].实验科学与技术,2009,(10):102-104.
[3]黄爱民.对建立实验教学体系的思索[J].实验室科学,2003,(5):17-19.
[4]冯毅萍.自动化实践类课程成绩综合评定创新研究[J].实验技术与管理,2006,23(3):19-21.endprint
