细纱车间自动引导坐车的设计与研究
2017-11-24盐城工业职业技术学院杨晓芳武银飞徐帅
盐城工业职业技术学院杨晓芳 武银飞 徐帅
本文结合AGV技术,设计了一种细纱车间自动引导坐车,其设有断纱自动识别装置,自动化程度较高。断纱识别采用图像采集、灰度化、纠偏、识别判断的步骤方法,实验表明,该方法能有效地识别断纱的发生。
AGV;图像处理;细纱机;磁导航
细纱车间自动引导坐车的设计与研究
盐城工业职业技术学院杨晓芳 武银飞 徐帅
近年来,随着生活水平的上升、人口老龄化以及劳动人员素质的普遍提升,纺织行业日渐出现了“无工可用”的情况。究其原因,纺织行业劳动强度大、环境差是主要原因。以细纱长车为例,挡车工巡回时劳动强度较大,曾有学者估算,挡车工每天要走20多里路,这对于工人的身心健康是很大的挑战。针对此,国内一度出现各种载人巡检车,但其采用落后的导轨进行导向,且不能自动探测断纱并停车,自动化程度低,虽能部分减低工人劳动强度,但对于工作效率提高不大。为此,本文研究设计了一种采用磁导航、基于机器视觉的细纱车间自动引导坐车。
1 车体结构设计
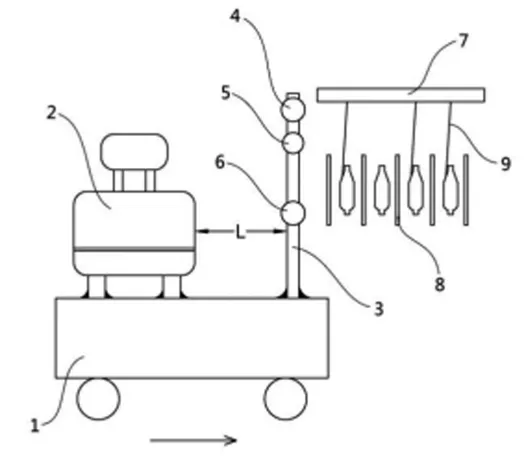
图1 细纱自动引导坐车车体结构
图1是本文设计的细纱自动引导坐车的结构示意图。细纱自动引导坐车主要包括车体1、车座2和立柱3,车座2和立柱3均装于车体1上,二者间有一距离L,L一般为20~50cm。立柱3上装有工业相机4和位置传感器6,工业相机4的上下位置与细纱机前罗拉7相当,目的是使工业相机4能较好获得前罗拉7输出纱线9的图像。位置传感器6的上下位置与细纱机隔纱板8相当,由于目前细纱机隔纱板大都是铁质材料制成,因此位置传感器6可以使用电感式接近开关。具体工作时,车体1在沿细纱机行进时,其位置传感器6将感应到每个纱锭的隔纱板8,并相应地给出一个信号,该信号触发工业相机4采集图像,当纱线断裂时,采集的图像上将没有纱线,此时巡检车将开始制动,经过上述L距离后,车座正好停于断纱纱锭处。
上述巡检车能自动识别细纱机上的断纱,并经过一段制动距离后准确停于断纱纱锭处,大大提高了工作效率、自动化程度和舒适性。
为了进一步提高采集图像的质量,还可以在工业相机4下安装光源5。
2 控制系统硬件结构设计
本文的细纱自动引导坐车与目前的AGV有相似之处,控制系统的硬件结构上也参考AGV控制系统。图2是本文细纱自动引导坐车的控制系统组成示意图。其中,控制系统的控制器采用STM32系列微处理器,断纱的图像识别、直流无刷电机的速度反馈、速度控制、导航控制均在其控制下完成。断纱识别采用图像处理的方法,识别结果输出给主控CPU。速度反馈来自无刷电机的霍尔传感器;无刷电机速度控制及导航控制采用PID控制算法,算的结果采用PWM占空比方式调节两只无刷电机转速。
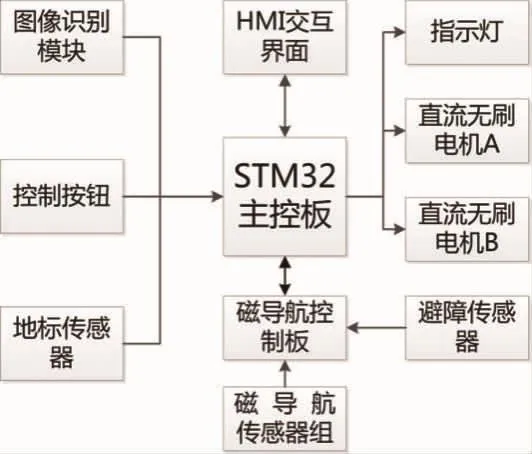
图2 细纱自动引导坐车硬件组成
总体来讲,目前对于无刷电机速度控制的解决方案较完备,可参考的资料较多,控制系统的重点是导航控制与断纱识别。
3 断纱自停识别与研究
传统上,细纱的断纱检测完全靠人工进行。近年来,细纱断纱检测成为纺织自动化的研究热点之一,出现了钢丝圈运动光电扫描、钢丝圈运动电磁感应、导纱钩纱条光路遮断、导纱钩摩擦热敏传感、导纱钩张力位移等各种方法。由于本文的系统实时性较高,且随着引导车运行,因此采用图像处理的方法进行断纱识别。本文断纱识别的一般步骤是:图像采集→灰度化→纠偏→识别判断。
图3是细纱机上实地采集的图像,可以发现纱线会有一定程度倾斜。
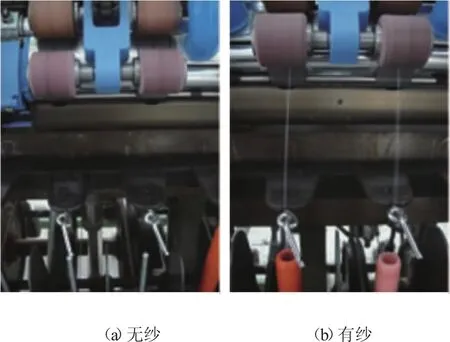
图3 细纱图像采集
图4是对倾斜的纱线进行纠偏后的对比图。纠偏方法是:以0.1°为步长作循环,计算角度对应的直线上所有像素点的灰度平均值,同时标明这些平均值对应的角度,循环结束后得到201个灰度平均值及对应的201个角度。这些灰度平均值当中的最小值所对应的角度就是所要寻找的图像纠偏角度。从图4可以看出,本方法能有效纠偏,为下一步识别打下基础。
对图4的图像进行曲线图形式显示,结果如图5所示,可直观发现二者差异。进一步进行方差运算,并据此判别是否断纱。
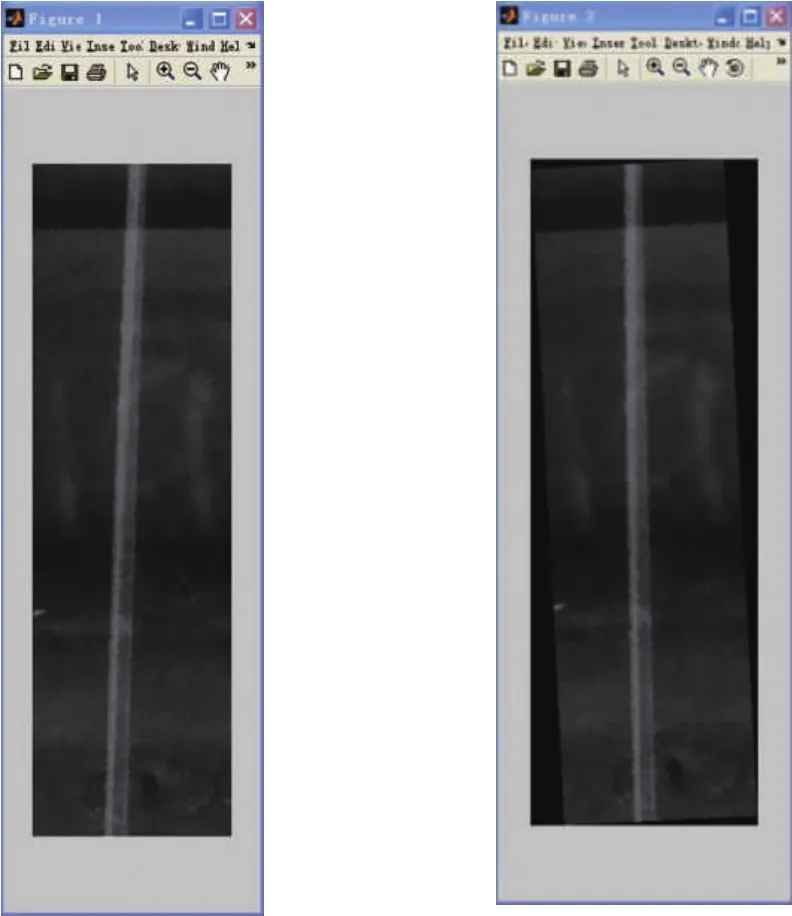
图4 纠偏前后对比图
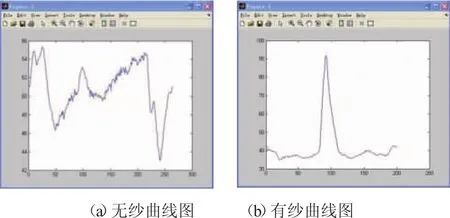
图5 有无纱线曲线图对比
4 结论
本文主要研究设计了一种细纱自动引导坐车,其采用先进的AGV技术,实现了自动引导,为进一步提高坐车自动化提供了参考。本文还研究了基于图像处理的断纱识别技术,结果表明,该技术能较可靠识别有无断纱,并且方便应用在移动行走的坐车上。
[1]苟永波.细纱机纱线断头监测技术的研究[J].科技与企业,2016(03):239+242.
[2]康吉源.环锭纺细纱机断头监控系统的研究设计[D].东华大学,2015.
[3]宋晓亮.环锭纺细纱断纱在线监测[D].江南大学,2014.
[4]王琳华.磁导式AGV自动导航车控制系统的设计[D].长沙理工大学,2013.
[5]龚羽,倪远.环锭细纱机纺纱断头监测技术现状与发展评析[J].纺织导报,2012(06):100~104.
[6]罗军辉,冯平等.MATLAB7.0在图像处理中的应用.北京:机械工业出版社,2005.
杨晓芳,女,1984年出生,硕士,讲师,研究方向:机械工程。
项目:盐城工业职业技术学院2015年度科研课题“细纱车间快速充电自动引导坐车的研究与开发”(项目编号ygy1511)。