椰糠培育叶菜种苗移植机械手设计与试验
2017-11-24吕亚军胡俊生谢忠坚杨艳丽江海宇
黎 波 ,辜 松 ,2※,初 麒 ,吕亚军 ,胡俊生,谢忠坚,杨艳丽,江海宇
(1. 华南农业大学工程学院,广州 510642;2. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642;3. 广州实凯机电科技有限公司,广州 510642;4. 广州市绿翔机电安装工程有限公司,广州 511400)
椰糠培育叶菜种苗移植机械手设计与试验
黎 波1,辜 松1,2※,初 麒1,吕亚军1,胡俊生1,谢忠坚1,杨艳丽3,江海宇4
(1. 华南农业大学工程学院,广州 510642;2. 华南农业大学南方农业机械与装备关键技术教育部重点实验室,广州 510642;3. 广州实凯机电科技有限公司,广州 510642;4. 广州市绿翔机电安装工程有限公司,广州 511400)
针对椰糠与泥炭相比容重小、孔隙度大、颗粒间黏附性弱,现有移植机械手对椰糠培育种苗移植适应性不佳的问题,该文以椰糠培育芥蓝种苗为移植对象,设计了一种4伸缩针式移植机械手,伸缩针直径2.5 mm、入土角76°。在移植机械手移植过程中,仅依靠基质块的基质散落质量百分比难以说明移植部件对种苗根系的影响,该文提出了一种基质散落质量百分比结合基质散落区域评分的综合评价法。针对50穴盘椰糠培育芥蓝种苗,通过伸缩针拾取试验,在保证椰糠基质块移植过程中保持完整条件下,确定了移植机械手伸缩针间距为36 mm;通过移植作业性能试验表明,叶菜种苗根系状态对移植成功率影响最大,机械手作业移动加速度也有一定影响,对最优组合分析后补做试验,试验结果表明对于正常长势椰糠培育芥蓝种苗根系状态,在根系分布率大于80%、垂直加速度0.3 m/s2、水平加速度1.5 m/s2和基质含水率81.01%条件下,芥蓝种苗移植成功率可达100%。该研究可为移植椰糠培育种苗的移植机开发提供技术参考。
农业机械;设计;试验;水培叶菜;种苗;移植机械手;椰糠基质
0 引 言
中国设施园艺近年发展迅速,2015年设施园艺生产面积达到433.33万 hm²以上,然而中国设施园艺机械化水平还相对落后,占比达 95%的蔬菜综合机械化生产水平仅达25%左右[1],这与2012年中国水稻、玉米、小麦综合机械化生产水平分别为68.82%、74.95%和93.21%[2]相比存在较大差距。设施水培蔬菜生产过程中种苗移植作业主要采用人工,人工移植作业不仅劳动强度大、效率低、移植质量不稳定[3-4],人工成本也在逐年攀升[5-6],因此开发适应中国水培蔬菜生产模式的穴盘种苗移植机械是设施园艺现代化生产的发展趋势。
在国外,荷兰、美国等国家穴盘种苗移植技术发展已较为成熟[7],其移植对象主要是盆栽花卉种苗,移植机械手主要分为铲式和针式2种类型[1]。近年,随着设施水培蔬菜生产的发展,欧洲开发出了水培叶菜种苗移植机,但因采用基质块培育种苗,其移植机械手结构相对简单[8],不适合中国穴盘生产水培蔬菜种苗的模式[9]。国内,张诗[10]、刘凯[11-12]、孙国祥[13-14]、韩绿化[15-16]等针对穴盘种苗移植提出了不同形式的移植机械手,冯青春[17]、童俊华[18]、高国华[19]、王跃勇[20]等针对移植机械手进行了作业性能研究,但上述研究均针对泥炭基质栽培种苗。目前华南地区水培叶菜种苗生产多以椰糠为主要栽培基质,椰糠与泥炭相比容重小、孔隙度大、颗粒间黏附性弱[21-22],现有移植机械手入土位置及收缩拾取模式都难以保证椰糠基质块的完整性,伤及种苗根系。本文以为广东省水培叶菜种植企业研制水培叶菜种苗自动移植机为目标,开发适合椰糠栽培的水培叶菜种苗移植机械手,通过机械手移植试验,确定移植机械手关键结构参数及作业参数,为椰糠栽培种苗自动移植机开发提供技术参考。
1 移植机械手设计
1.1 设计条件
本研究针对的水培叶菜种苗为种植企业生产量大、具有较好效益[23-25]的芥蓝种苗。芥蓝种苗移植苗龄为 2周,其栽培基质由椰糠、泥炭和珍珠岩组成,种植企业使用的基质质量比为8∶2∶1。
水培叶菜种苗生产使用50穴(5×10)塑料穴盘,外形尺寸为280 mm × 540 mm,穴孔上部边长46 mm,下部边长22 mm,深度48 mm,穴盘厚度1 mm,材料为PVC。
为考察芥蓝种苗几何参数,选取移植苗龄芥蓝种苗60株(图1),测得株高为(65±15)mm,主茎分布区域直径为(21±7)mm。
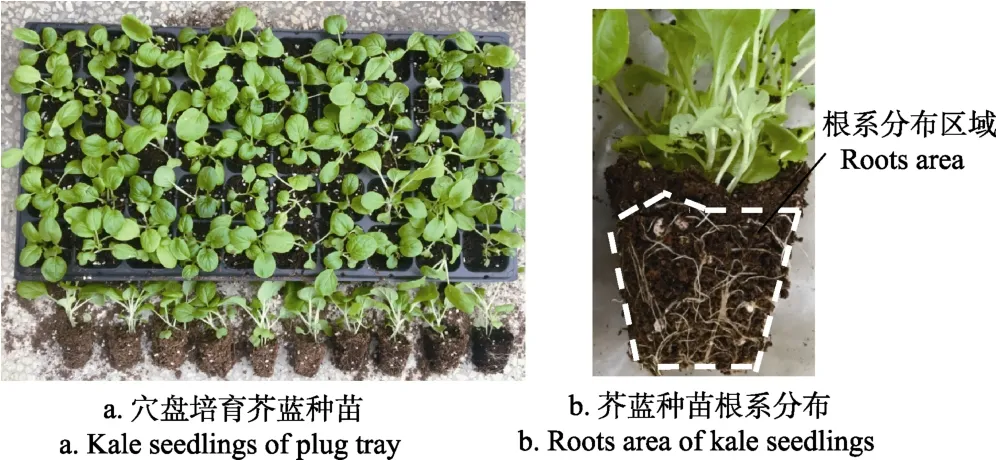
图1 芥蓝种苗Fig.1 Kale seedlings
1.2 基质特性分析
本研究移植对象主要采用椰糠作为栽培基质,其特性见表1[26],椰糠的容重不到泥炭的1/3,总孔隙度是泥炭的 2倍,这使得椰糠颗粒间的黏附力比泥炭的小,导致椰糠基质块相比于泥炭容易散裂。
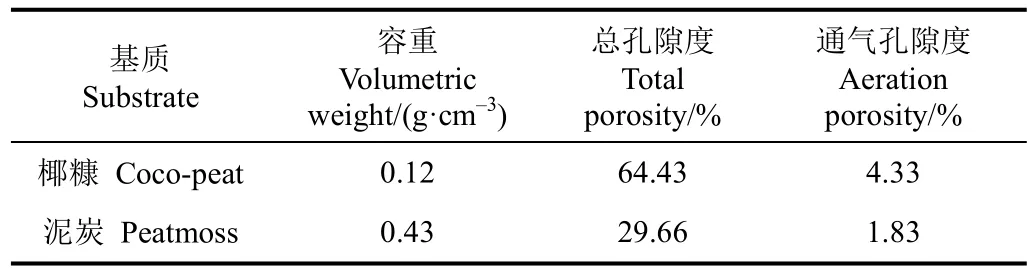
表1 椰糠与泥炭特性参数Table 1 Characteristic parameters of cocopeat and peatmoss
为对比椰糠与泥炭颗粒黏附特性,分别以椰糠和泥炭为对象进行立方块压缩试验,针对50穴盘基质块大小,取35 mm×35 mm×35 mm立方自然填充的基质,再将其压缩至原有体积 80%的立方块以利成形,利用 ARK-10M4-20型测力仪以1 mm/s的速度进行平板压缩(图2),测试 2种基质立方块发生散裂的压缩率,此状态下的压缩率称为临界压缩率,各条件下测试重复5次。图2测试结果表明,压缩时椰糠比泥炭更容易散块,这是因为椰糠孔隙度大,颗粒间难以形成黏附力所致,这种趋势随着基质含水率的增加而增加。
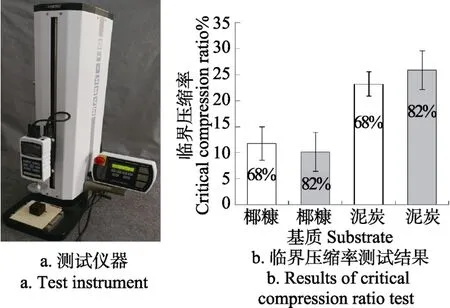
图2 基质立方块散裂临界压缩率测试结果Fig.2 Results of critical compression ratio test for substrate cubes spallation
1.3 设计方案
设施园艺移植机主要用于盆栽花卉种苗移植作业,常见移植机械手以拾取部件来分类主要有铲式和针式两种形式[27](图3)。铲式移植机械手伸缩铲插入基质边缘,各伸缩铲向基质块中心聚拢实现对基质块的收缩拾取,铲式机械手尺寸较大,易对基质块造成破坏,适用于小苗移植;针式移植机械手,利用伸缩针插入基质,收缩夹持提取基质块,也有不收缩依靠伸缩针倾角提取基质块[9],适用于大苗移植。
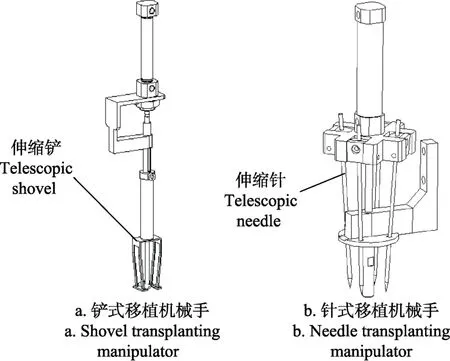
图3 常见移植机械手Fig.3 Commonly transplanting manipulator
根据椰糠孔隙度大、颗粒间黏附力较小、基质块易散裂的特性,本研究采用不收缩针式移植手结构,以减少对椰糠主体基质块的扰动、避免基质块散裂,依靠伸缩针的倾角提取基质块。
为了解伸缩针移植水培叶菜种苗的受力情况,对基质块刚好脱离穴盘时的受力进行分析,如图4所示。
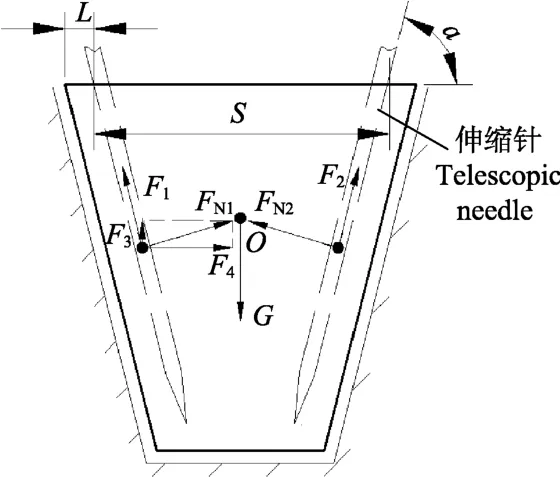
图4 基质块脱离穴孔壁时刻受力分析图Fig.4 Force analysis diagram when substrate cube break away from wall of plug tray hole
O点为基质块质心,伸缩针与水平方向夹角记为入土角α,FN1和FN2为基质块对伸缩针的正压力,FN1对基质块产生2个分力,F3对基质块向上提升,F4将基质块向中心挤压。当伸缩针插入基质块点与外边缘距离L较小时,伸缩针上承载的基质块质量较大,FN1较大,F3和F4也相应较大,伸缩针对基质块的提升效果较好,但基质块会受到较大挤压力。另外基质块还受到伸缩针对其的张力F1和F2的作用,F1和F2沿伸缩针斜向上对基质块起提升作用,张力与基质含水率及基质颗粒间黏附性等物理参数有关[28]。
考虑基质块拾取稳定性,选取 4根伸缩针,移植机械手主要由气缸、导管座、导管、伸缩针构成(图5a)。气缸杆与导管座连接,4个导管固定在导管座上,4根伸缩针与气缸体连接,可在气缸驱动下在导管内滑动。如图 5b,为避免移植机械手拾取时压伤水培叶菜种苗,根据芥蓝种苗株高(65±15) mm,导管垂直长度C1取为80 mm;根据基质块深度为48 mm,伸缩针伸插入基质块的垂直深度C2取为43 mm,因此气缸选为CDQ2B 32-45型;伸缩针入土角α取为基质块的倾角,根据基质块的几何尺寸计算为76°。
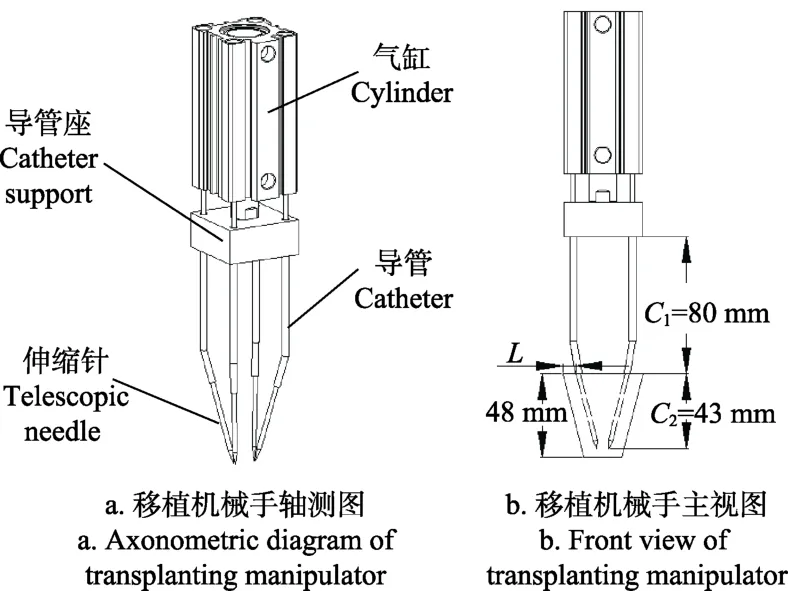
图5 水培叶菜种苗移植机械手Fig.5 Seedlings transplanting manipulator of hydroponics leafy vegetables
为确定伸缩针外径,选取1、1.5、2、2.5、3、3.5、4 mm钢针依次安装于移植机械手气缸上对芥蓝种苗基质块进行拾取效果探索试验,试验针对根系分布较差、基质处于较干状态的芥蓝种苗。试验结果表明,2 mm及以下伸缩针刚性差、易弯曲,不利于基质块稳定拾取;3 mm及以上伸缩针,基质块易被伸缩针扎裂破碎,导致基质块在移植过程开裂而使基质散落。综上所述,伸缩针直径确定为2.5 mm,伸缩针材料采用不锈钢。
根据图4的受力分析,伸缩针的间距S与L呈相关性,因L的大小影响伸缩针对基质块的提升力和破裂程度,L与S值通过机械手移植试验确定。
2 机械手移植试验
2.1 伸缩针拾取试验
为确定伸缩针插入基质块插入点与外边缘的适宜距离L及伸缩针间距S,进行距离L、根系状态T、及基质含水率W影响伸缩针伤根情况的正交试验。
2.1.1 试验因素
由基质块移植时受力分析可知,伸缩针插入基质块点与外边缘距离L影响伸缩针对基质块的拾取效果,因此将L作为对根系损伤的影响因素。L越小,承载于伸缩针上基质块质量越大,伸缩针对基质块整体提升性能越好,但L过小,伸缩针易破坏基质块的边缘部分且易扎破穴盘,考虑到伸缩针的直径及作业偏差,取L最小值为 5 mm;L过大,伸缩针插入点会进入芥蓝种苗茎干分布区伤及茎干,根据芥蓝种苗主茎分布区域直径最大值 28 mm和穴孔上部边长46 mm,L最大值取9 mm,L的3个水平取为9、7和5 mm。
根系损伤情况还与基质含水率有关,将其也作为一对根系损伤的影响因素。播种前向穴盘填充等质量基质,芥蓝成苗后,以基质块浇透水为高含水率,放置3 d后为低含水率,取高、低含水率湿基质样本,分别使用HX1002T型电子天平称湿基质质量,通过DHG-9070A型电热鼓风干燥箱,以120 ℃连续烘干10 h,再称取烘干后质量,基质含水率依据下式计算[29]

计算得到基质高、低含水率分别为89.90%、72.12%。中含水率为高、低含水率的平均值81.01%,为保证各基质块含水率基本一致,根据计算,分别对每一基质块浇水获得中含水率基质块,因此含水率的3个水平为72.12%、81.01%和89.90%。
种苗根系对基质块有聚合作用,将水培叶菜种苗根系状态也作为对根系损伤的另一影响因素。由于根系的立体分布特征,无法进行无损测量,在此以基质块 4个侧面根系分布面积(图 1b)与侧面总面积比值(根系分布率)的平均值来说明根系的分布,当根系分布率小于50%时,根系状态记为“差”;当根系分布率为50%~80%时,根系状态记为“中”;当根系分布率大于80%时,根系状态记为“好”,据此,根系分布率的3个水平为差、中和好。
2.1.2 试验评价指标
水培叶菜种苗栽培农艺要求移植过程中尽量减小对根系的损伤,移植时基质在伸缩针挤压下发生破碎而部分散落,会导致种苗部分根系受拉力作用被拉断,而基质散落越靠近基质块中部根系,根系损伤程度越大,因此应保证移植后基质块尽可能完整。韩绿化等[15]以根土破坏率,王跃勇等[20]以基质完整率考察根系破坏程度,二者方法均以移植时脱落的基质质量来反映根系损伤情况,然而不同区域基质散落对根系的损伤情况是不同的,根系在基质块中是由中部向外放射性分布,如图6a中基质块单侧散落质量与图6b中基质块双侧散落质量基本相同,但二者造成根系损伤结果会不同,因此根系损伤情况仅依靠基质块散落质量来描述存在局限性。针对此问题本研究对基质块进行放射层式分区,依据对中心根系可能产生的损伤分为4个区,并进行评分,如图6c,1~4区对应分值分别为1区:1分,2区:2分,3区:3分,4区:4分。根系损伤得分SRD为各分区分值与该分区基质未散落质量百分比乘积之和,基质块无散落为10分,SRD计算公式如下

式中SRD为根系损伤得分;A、B、C和D区分别为1、2、3和4区基质未散落质量百分比,%。
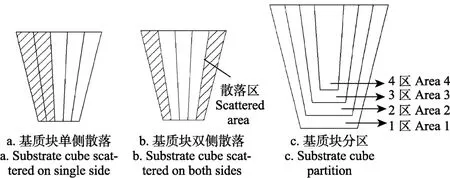
图6 基质块两种散落情况对比及评分分区Fig.6 Comparison of two different substrate cube scattered and its score partition
根系损伤得分分值越高,说明靠近根系的基质散落量越少,该评价方法可以较好地反映基质散落量与根系损伤情况之间的关系,本试验以根系损伤得分为拾取位置试验的目标函数进行考察。
2.1.3 试验设计
针对考核指标根系损伤得分,影响因素伸缩针插入基质块插入点与外边缘距离L的 3个水平取为 9、7、5 mm,根系分布状态3个水平取为“差”、“中”、“好”,基质含水率3个水平取为72.12%、81.01%、89.90%。试验选用L9(33)正交表安排,每个试验条件组合移植30株种苗, 具体试验因素水平如表2所示。
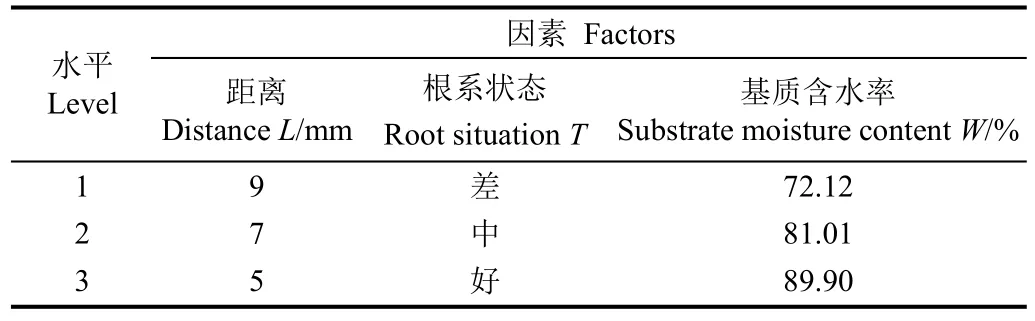
表2 移植机械手拾取位置正交试验因素与水平Table 2 Orthogonal experiment factors and level of transplanting manipulator picking up location
移植试验装置如图 7所示,机械手挂接于 Denso VP-6242E/GM六轴机械手臂上进行移植试验,机械手臂最大可搬运负荷2 kg。
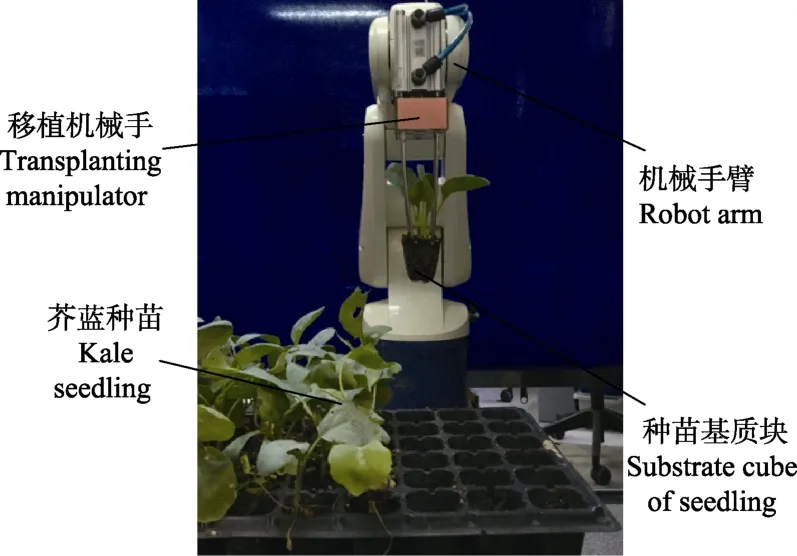
图7 移植机械手拾取位置试验装置Fig.7 Test devices of transplanting manipulator picking up position
2.1.4 结果与分析
对表 3中的试验结果利用极差法分析可知,影响根系损伤得分的主次因素顺序依次为根系状态、距离、基质含水率。最优水平组合为:距离L=5 mm、根系状态为“好”、基质为中等含水率81.01%,此时根系损伤得分为8.87分,基质散落情况与图6c中只有1区基质块全部散落(9分)大致相当。
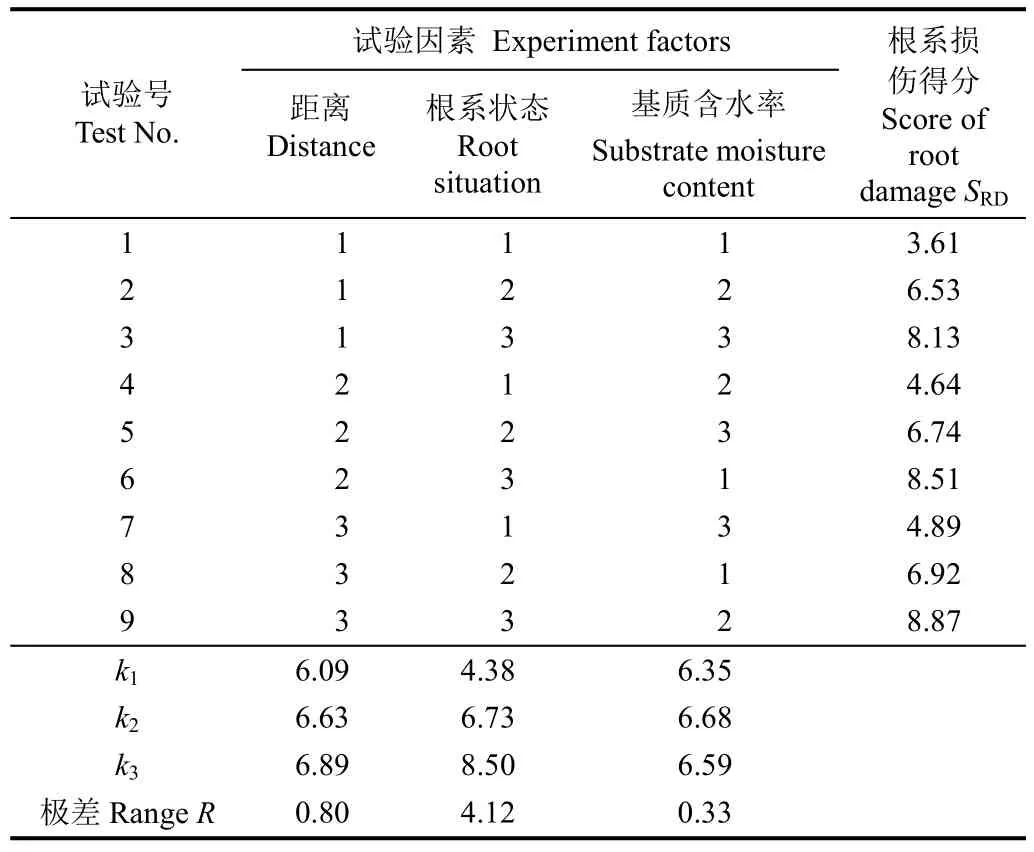
表3 移植机械手拾取位置正交试验结果Table 3 Orthogonal experiment results of transplanting manipulator picking up location
根系状态对根系损伤得分的影响最显著,根系状态为“好”时,根系损伤得分均大于 8分,而当根系状态分别为“中”与“差”时,根系损伤得分分别降为6.5分与 4分左右,主要原因为根系状态越差,根系对基质块的聚合效果越差,伸缩针插入基质块易发生破碎,此时基质散落拉断根系而导致根系受损。
含水率对于根系损伤得分的影响最小,由表 3中基质含水率所在列k1<k2和k2>k3可知,根系损伤得分随着含水率的增大,先增大后减小,出现该现象的原因是随着含水率增大,基质块颗粒间黏附张力增大,伸缩针对基质块提升力也增大,基质块不易散落,有利于基质块的拾取作业,但含水率继续增大会使基质块与穴盘壁黏附力增大,基质在拾取过程中易黏附于穴盘壁而散落导致根系被拉断,因此在水培叶菜生产中,应将浇透水的水培叶菜种苗静置一段时间再进行移植作业,可减少对基质块根系的损伤。
距离L由9 mm减为5 mm的过程中,根系损伤得分在不断增大,为减小对水培叶菜种苗根系的损伤,L取为5 mm,根据基质块上边长为46 mm,于是伸缩针的间距S取为36 mm。
2.2 移植作业性能试验
为考察作业参数对移植机械手作业性能的影响,将移植机械手挂接于移植机上,在以机械手移植成功率为考核指标的同时,以根系状态T、移植机械手水平加速度Gh、移植机械手垂直加速度Gv为影响因素进行移植机械手作业性能正交试验。
2.2.1 试验材料与方法
本试验以机械手的移植成功率为目标函数,移植机械手顺利把水培叶菜种苗由穴盘移植至种植槽种植孔内,且基质散落质量低于原质量的30%定义为移植成功。
机械手移植时有垂直提升与水平输送两个动作,因此对于移植成功率,垂直加速度及水平加速度是重要影响因素。为确定垂直加速度Gv水平,进行初步移植试验,选取不利作业条件组合,即基质为低含水率72.12%、根系状态为“差”、伸缩针插入基质块插入点与外边缘距离L=13 mm,移植部件加速度调节通过控制伺服电机来实现。试验结果表明当Gv大于0.8 m/s2时,移植成功率低于50%;Gv小于0.2 m/s2时,移植成功率可达95%以上;但Gv小于 0.3 m/s2时,垂直运动耗时大于 2 s,远大于Gv为0.8 m/s2时的0.5 s,综合考虑上述2个因素,因此影响因素Gv的3个水平取为0.3、0.5、0.7 m/s2。水平加速度Gh与Gv对基质块的作用方式都为惯性冲击,因此采用相同试验方式确定影响因素Gh的3个水平取为0.5、1.0、1.5 m/s2。
试验用水培叶菜种苗与试验2.1相同,基质含水率选取最优水平81.01%。由试验2.1可知,芥蓝种苗根系状态对移植作业有较大影响,本试验仍将水培叶菜种苗根系状态T作为影响因素,因素水平与试验2.1相同,选用L9(33)正交表安排试验, 具体试验因素水平如表4所示。
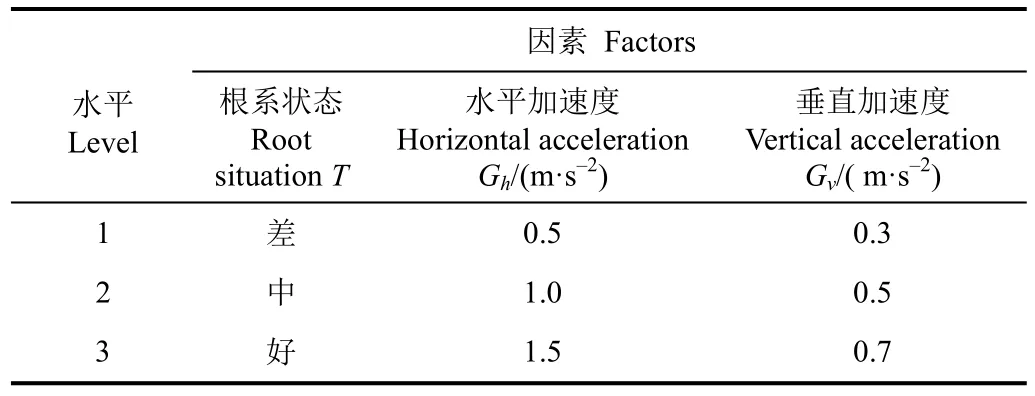
表4 移植机械手作业性能正交试验因素与水平Table 4 Orthogonal experiment factors and level of transplanting manipulator work capability
试验利用开发出的水培叶菜种苗移植机进行,如图8所示,移植机上安装5个移植机械手对应5×10穴盘,初始状态下,5个移植机械手贴合在一起,位于穴盘第一列种苗正上方,移植机械手分别对应一个穴盘穴孔;移植机械手由穴盘拾取种苗,通过伺服电机精准定位将种苗输送至种植槽正上方;然后通过笔形气缸将 5个移植机械手间距拉大至种植槽种植孔刚好对准,各移植机械手间距与相邻种植孔孔间距一致;接着移植机械手将种苗投放至种植槽种植孔内,移植机械手完成一次循环移植作业后,回到穴盘第 2列种苗正上方,每个试验条件组合移植30株种苗。
2.2.2 结果与分析
试验结果如表5所示,根系状态极差R值最大,说明根系状态对移植成功率的影响最显著。当根系状态为“好”,平均移植成功率可达96.67%,而当根系状态为“差”,平均移植成功率降为66.67%,因此在生产中应注意对水培种苗叶菜根系状态进行观察,应保证根系分布率大于80%以上再进行移植作业。
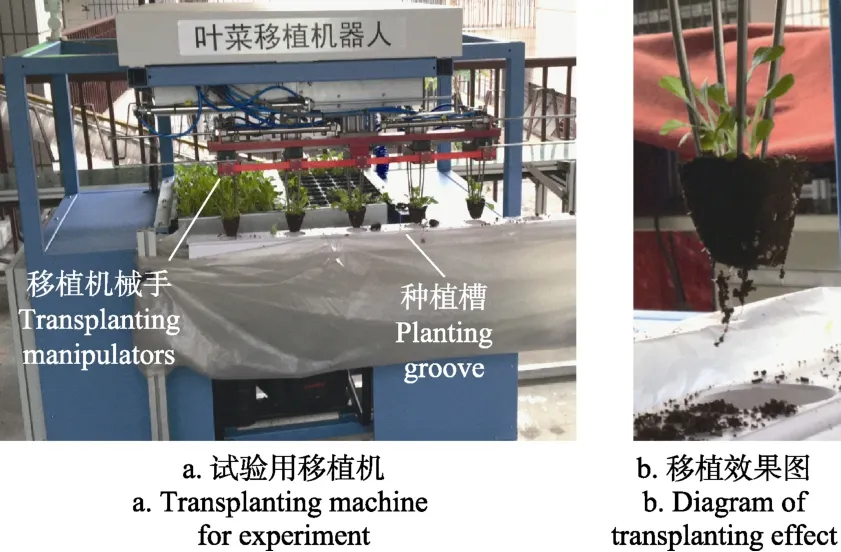
图8 作业性能试验用移植机及移植效果Fig.8 Transplanting machine for work capability experiment and transplanting effect
垂直加速度对移植成功率的影响也较大,在不同根系条件下都表现出,垂直加速度越大,成功率越低,当垂直加速度由0.3 m/s2增为0.7 m/s2,平均移植成功率由86.67%降为76.67%,这是因为垂直加速度越大,在重力作用下基质块受到的垂直冲击就越大,基质越易发生散落,在移植作业中垂直加速度不宜超过0.3 m/s2。
水平加速度极差值仅为 2.2远小于根系状态极差值30,因此水平加速度对移植成功率的影响较小,且不同水平加速度下平均移植成功率都为 80%左右,因为基质块所受水平力只会造成基质块水平晃动,对基质块造成的影响不足以使基质散落。当水平加速度取为最大1.5 m/s2时,移植成功率仍可达96.67%,为提高生产效率,水平加速度可取为1.5 m/s2。
对表 5试验结果进行极差分析,影响根系损伤得分的主次因素依次为根系状态T、垂直加速度Gv、水平加速度Gh,最优水平组合为根系状态“好”、Gh为0.5 m/s2、Gv为0.3 m/s2。但考虑到此条件组合下生产率较低,因此将Gh提高至1.5 m/s2补做试验,该组试验移植30株种苗,试验结果表明:Gh为1.5 m/s2时,移植成功率S为100%。

表5 移植机械手作业性能正交试验结果Table 5 Orthogonal experiment results of transplanting manipulator work capability
3 结 论
1)本研究针对以椰糠作为栽培基质培育水培叶菜种苗存在基质孔隙度大、颗粒间黏附性不强易破碎等问题,设计了一种 4伸缩针式移植机械手,依靠伸缩针的倾角提取基质块,伸缩针入土角 76°,伸缩针直径 2.5 mm、伸缩针入土间距36 mm,可实现椰糠为主要栽培基质的水培叶菜种苗的稳定移植作业。
2)本研究提出了基质散落质量百分比结合基质散落区域评分的综合评价法,通过基质散落量与散落区域位置综合描述散落量与根系分布位置的关系,克服了仅依靠基质散落量难以体现其对根系损伤程度的缺点。
3)通过对4伸缩针式移植机械手移植作业性能试验,针对使用椰糠为主要栽培基质的水培叶菜芥蓝种苗,当基质含水率为81.01%、水平加速度不大于1.5 m/s2、垂直加速度不大于0.3 m/s2、根系分布率大于80%情况下,芥蓝种苗移植成功率可达100%。
[1] 辜松. 设施园艺现代生产装备与技术[M]. 北京:中国农业出版社,2015:1-2.
[2] 陈永生,胡桧,肖体琼,等. 我国蔬菜生产机械化现状及发展对策[J]. 中国蔬菜,2014(10):1-5.
[3] 刘炜,刘继展. 穴盘苗移栽机器人末端执行器综述[J].农机化研究,2013(7):6-10.Liu Wei, Liu Jizhan. Review of end-effectors in tray seedlings transplanting robot[J]. Journal of Agricultural Mechanization Research, 2013(7): 6-10. (in Chinese with English abstract)
[4] 岳建魁,郭俊先,梁佳,等. 国内外移栽机械发展现状[J].新疆农机化,2016(5):30-32.Yue Jiankui, Guo Junxian, Liang Jia, et al. The development status of transplanting machinery at home and abroad[J].Xinjiang Agricultural Mechanization, 2016(5): 30-32. (in Chinese with English abstract)
[5] 齐飞,周新群,张跃峰,等. 世界现代化温室装备技术发展及对中国的启示[J]. 农业工程学报,2008,24(10):279-285.Qi Fei, Zhou Xinqun, Zhang Yuefeng, et al. Development of world greenhouse equipment and technology and some implications to China[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2008, 24(10): 279-285. (in Chinese with English abstract)
[6] 金三林,朱贤强. 我国劳动力成本上升的成因及趋势[J].经济纵横,2013,154(2):37-42.
[7] 辜松,杨艳丽,张跃峰. 荷兰温室盆花自动化生产装备系统的发展现状[J]. 农业工程学报,2012,28(19):1-8.Gu Song, Yang Yanli, Zhang Yuefeng. Development status of automated equipment systems for greenhouse potted flowers production in Nether lands[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(19): 1-8. (in Chinese with English abstract)
[8] 秦四春,辜松,王跃文. 欧洲水培叶菜机械规模化生产系统[J]. 农机化研究,2017(12) :264-268.Qin Sichun, Gu Song, Wang Yuewen. The production system of hydroponic leafy vegetables mechanical large-scale in European[J]. Journal of Agricultural Mechanization Research,2017(12): 264-268. (in Chinese with English abstract)
[9] 高国华,冯天翔,李福. 斜入式穴盘苗移栽手爪工作参数优化及试验验证[J]. 农业工程学报,2015,31(24):16-22.Gao Guohua, Feng Tianxiang, Li Fu. Working parameters optimization and experimental verification of inclinedinserting transplanting manipulator for plug seedling[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(24): 16-22. (in Chinese with English abstract)
[10] 张诗,田素博,邱立春. 穴盘苗自动移栽机械手的结构设计与仿真[J]. 沈阳农业大学学报,2007,38(3):437-439.Zhang Shi, Tian Subo, Qiu Lichun. Structure design and simulation on manipulator of transplanting potted tray seedlings[J]. Journal of Shenyang Agricultural University,2007, 38(3): 437-439. (in Chinese with English abstract)
[11] 刘凯,辜松. PLC 在穴盘苗移栽机器人控制系统中的应用[J]. 农机化研究,2009(12):179-181.Liu Kai, Gu Song. The application of PLC in the control system of transplanting potted seedling manipulator[J].Journal of Agricultural Mechanization Research, 2009(12):179-181. (in Chinese with English abstract)
[12] 刘凯. 2YZ-2000型秧苗移栽机关键部件的开发研究[C]//中国农业工程学会2011年学术年会论文集. 重庆:西南大学出版社,2011:22-25.
[13] 孙国祥,汪小旵,何国敏,等. 穴盘苗移栽机末端执行器设计与虚拟样机分析[J]. 农业机械学报,2010,41(10):48-53.Sun Guoxiang, Wang Xiaochan, He Guomin, et al. Design ofthe end-effector for plug seedlings transplanter and analysison virtual prototype[J]. Transactions of the CSAM, 2010, 41(10):48-53. (in Chinese with English abstract)
[14] 孙国祥. 基于机器视觉技术的穴盘苗自动移栽机器人研究[D]. 南京:南京农业大学,2009.Sun Guoxiang. Automatic Plug Seedlings Ttransplanting Rrobot Based on Machine Vision[D]. Nanjing: Nanjing Agricultural University, 2009. (in Chinese with English abstract)
[15] 韩绿化,毛罕平,严蕾,等. 穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J]. 农业机械学报,2015,46(7):23-30.Han Lühua, Mao Hanping, Yan Lei, et al. Pincette-type endeffector using two fingers and four pins for picking up seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 23-30.(in Chinese with English abstract)
[16] 韩绿化. 蔬菜穴盘苗钵体力学分析与移栽机器人设计研究[D]. 镇江:江苏大学,2014.Han Lühua. Mechanical Analysis of the Root Lumps and Development of A Robotic Transplanter for Vegetable Plug Seedlings[D]. Zhenjiang: Jiangsu University, 2014. (in Chinese with English abstract)
[17] 冯青春,王秀,姜凯,等. 花卉幼苗自动移栽机关键部件设计与试验[J]. 农业工程学报,2013,29(6):21-27.Feng Qingchun, Wang Xiu, Jiang Kai, et al. Design and test of key parts on automatic transplanter for flower seedling[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2013, 29(6): 21-27. (in Chinese with English abstract)
[18] 童俊华,蒋焕煜,蒋卓华,等. 钵苗自动移栽机器人抓取指针夹持苗坨参数优化试验[J]. 农业工程学报,2014,30(16):8-16.Tong Junhua, Jiang Huanyu, Jiang Zhuohua, et al. Experiment on parameter optimization of gripper needles clamping seedling plug for automatic transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(16): 8-16. (in Chinese with English abstract)
[19] 高国华,冯天翔,李福. 盆栽红掌移栽手爪设计与工作参数优化[J]. 农业工程学报,2014,30(17):34-42.Gao Guohua, Feng Tianxiang, Li Fu. Design and optimization of operating parameters for potted anthodium transplant manipulator[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(17): 34-42. (in Chinese with English abstract)
[20] 王跃勇,于海业. 穴盘幼苗机械手取苗基质完整率影响因素试验与分析[J]. 农业工程学报,2015,31(14):65-71.Wang Yueyong, Yu Haiye. Experiment and analysis of impact factors for soil matrix intact rate of manipulator for picking-up plug seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 65-71.(in Chinese with English abstract)
[21] 李伟,郁书君,崔元强,等. 椰糠替代泥炭作观赏凤梨基质的研究[J]. 热带作物学报,2012,33(12):2180-2184.Li Wei, Yu Shujun, Cui Yuanqiang, et al. Comparative study on peatmoss and cocopeat as substrates in Hydroponics for Guzmania Ostara[J]. Chinese Journal of Tropical Crops, 2012,33(12): 2180-2184. (in Chinese with English abstract)
[22] 代惠洁,纪祥龙,杜迎刚,等. 椰糠替代泥炭作番茄穴盘育苗基质的研究[J]. 北方园艺,2015(9):46-48.
[23] 张静,张鲁刚,张玉. 芥蓝种质资源营养成分及商品性评价[J]. 中国蔬菜,2009(16):41-44.Zhang Jing, Zhang Lugang, Zhang Yu. Evaluation on nutritive elements and commodity traits of Chinese Kale Germplasm resources[J]. China Vegetables, 2009(16): 41-44. (in Chinese with English abstract)
[24] 宋世威,廖国秀,刘厚诚,等. 不同芥蓝品种产量及品质性状聚类分析[J]. 中国农学通报,2011,27(19):161-165.Song Shiwei, Liao Guoxiu, Liu Houcheng, et al. Cluster analysis on yield and quality characters of different Chinese Kale varieties[J]. Chinese Agricultural Science Bulletin, 2011,27(19): 161-165. (in Chinese with English abstract)
[25] 李桂花,熊瑞权,张辉玲,等. 芥蓝种质资源的营养品质分析[J]. 广东农业科学,2014,41(11):33-36.Li Guihua, Xiong Ruiquan, Zhang Huiling, et al. Physiological quality analysis on different cultivars of Chinese Kale[J].Guangdong Agricultural Sciences,2014, 41 (11): 33-36. (in Chinese with English abstract)
[26] 许明修. 椰糠、泥炭对蝴蝶兰生长影响[N]. 中国花卉报,2016-09-06(009).
[27] 王蒙蒙,宋建农,刘彩玲,等. 蔬菜移栽机曲柄摆杆式夹苗机构的设计与试验[J]. 农业工程学报,2015,31(14):49-57.Wang Mengmeng, Song Jiannong, Liu Cailing, et al. Design and experiment of crank rocker type clamp seedlings mechanism of vegetable transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(14): 49-57. (in Chinese with English abstract)
[28] 缪小花,毛罕平,韩绿化,等. 黄瓜穴盘苗拉拔力及钵体抗压性能影响因素分析[J]. 农业机械学报,2013,44(增刊1):27-32 Miu Xiaohua, Mao Hanping, Han Lühua, et al. Analysis of influencing factors on force of picking plug seedlings and pressure resistance of plug seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1):27-32. (in Chinese with English abstract)
[29] 杜森,高祥照. 土壤分析技术规范[M]. 北京:中国农业出版社,2006.
Design and experiment on manipulator for transplanting leaf vegetables seedling cultivated by coco-peat
Li Bo1, Gu Song1,2※, Chu Qi1, Lü Yajun1, Hu Junsheng1, Xie Zhongjian1, Yang Yanli3, Jiang Haiyu4
(1.College of Engineering, South China Agricultural University, Guangzhou510642,China; 2.Key Laboratory of Key Technology on Agricultural Machine and Equipment, Ministry of Education, South China Agricultural University, Guangzhou510642,China;3.Guangzhou Sky Mechanical & Electrical Technology Co., Ltd., Guangzhou510642,China;4.Guangzhou Lüxiang Mechanical and Electrical Installation Engineering Co., Ltd., Guangzhou511400,China)
Currently, cultivated area of facilities horticulture is growing rapidly in China, while the level of mechanization is very low, and the production of hydroponic leafy vegetables during the seedlings transplanting is mainly manual. So it is needed to develop a plug tray seedlings transplanting machine which fits the mode of China's hydroponics leafy vegetables production. The main operation object of the current transplanting machine in facilities horticulture is potted flowers that use different culture-substrate comparing with hydroponics leafy vegetables. In contrast, the production of hydroponics leafy vegetables uses coco-peat as the main culture-substrate in the South of China. Coco-peat has characteristics of small bulk density, large porosity, poor water-retention capacity, and poor adhesion between particles. Therefore, the existing facility horticultural transplanting manipulators are not suitable for such substrate. In view of the above problems, a 4-needle-type transplanting manipulator for hydroponics leafy vegetables for coco-peat substrate was designed in this paper. In the transplanting manipulator, we used a non-shrinkable needle structure that depended on the angle of the telescopic needle which can reduce the disturbance of the coco-peat as well as avoided the spallation of the substrate cube. In order to compare the adhesion characteristics between coco-peat and peat moss, a cube compression test has been done. The test results showed that coco-peat was more likely to be scattered than peat moss because the coco-peat has the characteristics of large porosity and difficulty forming adhesion between particles, and this trend was intensified with the increasing of substrate moisture content.The percentage of scattered substrate mass in the transplanting process and the remaining component on seedling root growth needed to be evaluated. As such, a comprehensive evaluation method that the percentage of scattered substrate mass combined with scored scattered area was proposed in this study. An experiment was carried out that used hydroponics leafy vegetables of kale (Brassica oleracea) seedlings as transplanting target, and the plug tray for seedlings cultivation was a 50 (5×10) standard plug tray, the culture-substrates were coco-peat, peat moss and perlite with mass ratio of 8:2:1. Through the design and experiment study, the structure parameters of 4-needle-type transplant manipulator were as follow, telescopic needle diameter,2.5 mm, the angle that telescopic needles insert into the substrate cube, 76°, the distance from the insert point of telescopic needles to the substrate cube edge, 5 mm. The results indicated that the root situations of hydroponics leafy vegetables seedlings had the greatest effects on the transplanting success rate, and the movement accelerations of the robot manipulator also had influences. The success rate of kale seedling transplantation was 100% , under the condition that the seedlings was in the status of normal growth, the vertical acceleration was 0.3 m/s2, the horizontal acceleration was 1.5 m/s2and the substrate moisture content was 81.01%. This study provides a technical reference for developing transplanting manipulator which transplanted the hydroponics leafy vegetables seedlings that use coco-peat as the main culture substrate.
agricultural machinery; design; experiments; hydroponics leafy vegetables; seedlings; transplanting manipulator; cocopeat
10.11975/j.issn.1002-6819.2017.14.003
S233.74
A
1002-6819(2017)-14-0018-07
黎 波,辜 松,初 麒,吕亚军,胡俊生,谢忠坚,杨艳丽,江海宇.椰糠培育叶菜种苗移植机械手设计与试验[J]. 农业工程学报,2017,33(14):18-24.
10.11975/j.issn.1002-6819.2017.14.003 http://www.tcsae.org
Li Bo, Gu Song, Chu Qi, Lü Yajun, Hu Junsheng, Xie Zhongjian, Yang Yanli, Jiang Haiyu. Design and experiment on manipulator for transplanting leaf vegetables seedling cultivated by coco-peat[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(14): 18-24. (in Chinese with English abstract)
doi:10.11975/j.issn.1002-6819.2017.14.003 http://www.tcsae.org
2017-01-24
2017-04-10
国家重点研发计划项目(2017YFD0701504)
黎 波,男,江西广昌人,博士生,主要从事现代园艺生产智能装备的研究。广州 华南农业大学工程学院,510642。
Email:bolee0086@sina.com
※通信作者:辜 松,男 ,博士生导师,教授,博士,主要从事现代园艺生产装备的研究。广州 华南农业大学工程学院,510642。
Email: sgu666@sina.com
