基于虚拟模型的雾滴与叶片的交互行为分析
2017-11-24丁维龙金梦杰罗临风吴福理徐利锋姬广梅朱德峰
丁维龙,金梦杰,罗临风,吴福理※,徐利锋,姬广梅,朱德峰
(1. 浙江工业大学计算机科学与技术学院,杭州 310023;2. 中国水稻研究所水稻生物学国家重点实验室,杭州 310006)
基于虚拟模型的雾滴与叶片的交互行为分析
丁维龙1,金梦杰1,罗临风1,吴福理1※,徐利锋1,姬广梅2,朱德峰2
(1. 浙江工业大学计算机科学与技术学院,杭州 310023;2. 中国水稻研究所水稻生物学国家重点实验室,杭州 310006)
该文针对现有雾滴与植物叶片交互行为的研究局限于水平叶片的问题,提出了一种基于试验的液滴与不同倾角的植物叶片交互行为的模拟方法,并设计了一种新的液滴弹跳方向计算方法。首先利用微距高速摄像机对液滴在不同倾角的叶片上的静态接触角大小做了精确测量,并拟合了其随叶片倾角增大的变化规律,然后以此将弹跳判定公式推广到0°~50°范围内任意倾斜的叶片上。在液滴弹跳方向计算上引入了蒙特卡洛法,代替了原有的镜面反射计算液滴弹跳方向。模拟结果表明该方法能够较真实的模拟液滴与任意倾斜叶片的弹跳判定、碰撞、驻留以及飞溅现象。该文提出的方法,为研究雾滴与叶片的交互行为提供新的思路,使得模拟过程的计算量相对较小,为植物冠层与大量雾滴交互的沉积量计算和大规模植物场景与雾场交互的实施绘制提供了技术参考。
机械化;农药;喷雾;虚拟模型;雾滴;叶片;交互行为分析
0 引 言
以大容量淋雨式喷雾法为代表的传统农药施用技术,其农药有效利用率很低[1-3]。过量的农药使用造成土壤的农药污染状况相当严重。流失到土壤中的药液,通过对地表水的污染会直接破坏天然水产资源并影响饮用水的质量,进而威胁人类的健康。因此,如何提高农药的利用率,以最少的化学农药使用量,获得最佳的病虫害防治效果,最大程度保护农田生态环境,显得尤为迫切。
作物农药施用有效利用率除与喷施机械、施药方法、药液组成有关外,与作物的叶片形态及株型也密切相关。研究雾滴在叶片上的沉积特性及行为特点,可以优化农药喷施方案,提高农药在农作物上的沉积量,降低农药在非靶标环境中的投放量具有重要意义[2]。为提高喷雾技术的农药有效利用率,众多学者在叶片表面性质[4-5]、叶片倾角[4]、雾滴大小及施药液量[6-7]对雾滴在作物叶片上沉积量的影响、不同喷雾方式对农药雾滴在水稻群体不同部位的沉积分布的影响[8]、喷雾机械的气流速度场[9-10]、雾滴沉积分布特性及影响因素[11-12]等众多问题进行了深入而又细致的探索。这些研究大多基于室内或田间试验,尽管卓有成效,但这种传统的试验方法,比较耗时耗力,而且费用也很昂贵。
近年来出现的虚拟植物模型[13-15],在与植物形态结构有关的诸多农业科学问题中,具有重要的研究价值。比如,研究建立虚拟作物冠层内雾滴沉积与传输模型[16],结合作物冠层株叶形态,研究农药喷雾的雾滴行为,分析冠层对农药喷雾的截留以及雾滴在冠层的沉积[17],对提高农药的有效利用率具有重要意义。再如,利用虚拟植物模型,可以帮助农技人员分析病害在作物群体三维空间中的扩散规律[18-19],虫害在作物群体三维空间中的藏匿和觅食规律[20],从而确定最佳的喷药时间和方式,以降低成本、减少环境污染。
国内外已有不少学者致力于虚拟作物与雾滴交互的研究[16-17,21-22]。比如,Dorr等将雾滴的运动模型与植物的三维结构相结合,开发了一个可模拟雾滴围绕不同植物结构飘移的湍流概率模型[22]。他们建立的植物结构模型比较简单,只假设雾滴一旦被叶片截获,就黏附在叶片上。事实上,与叶片碰撞后,雾滴的行为可能包括黏附[17]、分裂[17,23]和飞溅等[17,24],因此他们的模型很难模拟这个过程中所涉及到的物理过程。在后来的研究中,他们改进了这种模型,提出了利用基于过程的模型预测叶片对雾滴的截获以及雾滴在植物叶片上的沉积[25-26]。与之前的工作相比,尽管有了很大的进步,但他们的研究是基于叶片水平放置且雾滴垂直地喷洒在叶面上的假设,没有涉及叶片倾斜时雾滴与叶片的交互情况。事实上,作物冠层中的叶片,其空间位置绝大多数都不是水平的。如果雾滴从正上方垂直落下,那么雾滴与叶片的碰撞以及碰撞后的飞溅行为,对于倾斜放置的叶片和水平放置的叶片而言,结果显然是不同的。因此,基于水平放置的叶片推导出的雾滴碰撞判定公式和弹跳方向计算公式,对于处于倾斜状态的叶片是不适用的,需要发展新的计算方法。
鉴于Dorr等[26]模拟雾滴与植物叶片交互行为的工作仅针对水平叶片的局限,本文在其基础上,基于试验获取所需诸如静态接触角等物理参数,研究了雾滴与倾斜叶片的交互行为规律,进而更逼真地模拟虚拟叶片与喷雾的交互过程。本文的研究,可以为研究雾滴在叶片上的沉积特性及行为规律提供新的研究方法,也可为国内外同类研究提供技术参考。
1 理论分析
本节主要介绍了本研究的相关理论。1.1介绍了静态接触角,包括前进角和后退的定义;1.2介绍了液滴与叶片碰撞后的行为,具体介绍了弹跳的判断以及弹跳速度计算。
1.1 静态接触角
静态接触角是指在固体水平平面上静置液滴,固体表面上的固、液、气三相交界点处(如图1a中θ角所示[21]),其气体液体界面和固体液体界面两切线把液相夹在其中时所形成的角。当运动的液滴在某一时刻接触角大于静态接触角或者小于静态接触角时,液滴表面的张力就会驱使液滴表面发生前进或者回退,以使得液滴此时的接触角逼近于静态接触角。
当液滴所在的固体平面处于水平状态时,液滴各个方向的静态接触角都相同,如图 1a。然而当固体平面变为倾斜状态时,静态接触角随之发生变化,如图 1b。在图 1b中,B点处的静态接触角达到最大,称为前进角(advancing contact angle,缩写为ACA)。A点处的静态接触角达到最小,称为后退角(receding contact angle,缩写为RCA)。在前进角与后退角之间位置的静态接触角呈现一个递减的过程。
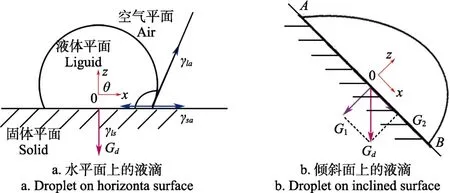
图1 液滴的静态接触角[21]Fig.1 Static contact angle of droplet
1.2 液滴与叶片碰撞后的行为分析
叶片是作物冠层的主要组成部分,因此研究液滴与作物冠层的交互过程,首先需要研究单个叶片与液滴交互过程中的行为特性和物理规律。早期的研究[26-28]将液滴与叶片碰撞的交互过程分为3个阶段:1)液滴的破碎判定;2)液滴的弹跳判定;3)弹跳后液滴的速度计算。
1.2.1 液滴与叶片碰撞的弹跳判定
发生碰撞后,液滴在叶片上逐渐扩展,其能量在动能与势能的转换之间发生变化,在形式上表现为液滴接触角的变化。如图 2所示,在扩展阶段,液滴的动能将转化为势能,液滴四周的接触角不断减小,与叶片接触的底面中径也越来越大[17]。当动能全部转化为势能时,液滴达到完全扩展状态,液滴与叶片的接触角达到最小,而接触底面半径则达到最大。液滴完全扩展时候的半径被称为扩展半径。当液滴到达完全扩展状态后,则进入回退阶段,势能将逐渐转化为动能,液滴四周的接触角则慢慢变大。相应地,叶片接触的液滴中径则逐渐减小。当液滴完全恢复到扩展阶段时,若其剩余能量大于零,则发生弹跳,反之则附在叶片上。
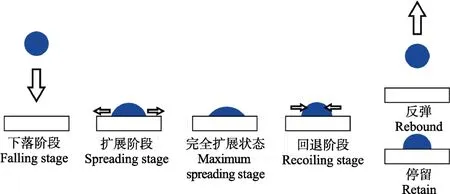
图2 液滴碰撞后的行为阶段[17]Fig.2 Behavior of droplet after collision
从以上的分析可以看出,液滴的扩展半径是决定液滴是否弹跳的重要参数。为了研究扩展半径的大小与液滴属性的关系,文献[27]利用微距摄像机拍摄不同半径、速度、密度时的液滴图像,随后归纳出液滴在碰撞时最大扩展半径与液滴属性的关系:
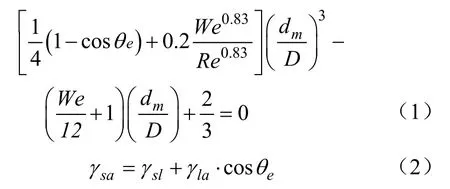
公式(1)中dm为液滴扩展半径,m;D为液滴的初始中径,m,θe为液滴的静态接触角(°)。We为韦伯数,Re为雷诺数。公式(2)中γsa,γsl和γla分别为固体-气体,固体-液体和液体-气体之间的表面张力,N/m,如图 1所示。静态接触角是联系固液气三者之间表面张力的纽带,因而本文使用静态接触角而不是动态接触角作为液滴的接触角属性。基于文献[27]所提出的液滴属性与液滴扩展半径的关系,Dorr等[26]研究了液滴与水平放置的植物叶片的碰撞,模拟出了水平叶片上液滴的破碎、弹跳以及驻留。但是,以上几位学者的工作仅研究水平放置的叶片与液滴的交互,并没有涉及到倾斜的叶片。如前所述,相同的液滴在水平叶片上和在倾斜叶片上,其与叶片的静态接触角截然不同。当叶片水平放置时,液滴的静态接触角当作一个定值来处理。但在叶片倾斜状态下,由于重力的原因,液滴与叶片的静态接触角在不同方向上是不同的,无法用一个定值来表示。Mercer等模拟了液滴与倾斜玉米叶片的碰撞,并且考虑了液滴在倾斜叶片上静态接触角的变化[17];但是在前进角与后退角的具体计算方面,他将液滴前进角与后退角的大小近似为液滴水平状态下静态接触角的大小加上或减去叶片的倾角。这种粗略的方法无法得到倾斜叶片上静态接触角的精确数值。
1.2.2 液滴与叶片碰撞后的速度计算
液滴与叶片碰撞后的速度决定液滴随后的行为,也决定了液滴在植物冠层的沉积量。计算碰撞后液滴的速度主要包括速度大小以及弹跳方向2个方面。液滴速度的大小取决于液滴经过回退阶段恢复初始形状时的剩余能量。文献[27]通过试验得到了剩余能量EERE的计算方法:

对于液滴的弹跳方向,由于受到不同因素的影响,具有一定的随机性。之前的研究[21,26-27]都以镜面反射处理为主,通过法向量来改变液滴的弹跳方向。这种单纯以镜面反射思想来模拟液滴的弹跳不够真实。由于叶片表面的粗糙度和亲水度等物理特性都会对其弹跳方向产生扰动,因此单纯的镜面反射方法不能真实的模拟其运动。
综上所述,国内外现有的液滴与叶片交互过程的研究,还存在诸多问题,比如倾斜叶片上液滴前进角与后退角的精确计算、基于扩展半径的弹跳判定只局限在水平叶片、液滴弹跳方向模拟比较粗糙。针对这些状况,本文主要在以下几点开展了创新性研究:1)利用微距镜头拍摄液滴在倾斜叶片上的静态接触角并计算其大小,随后归纳出静态接触角随着叶片倾斜变化的规律。2)改进液滴与叶片碰撞扩展半径以及剩余速度公式的计算,使其适用于液滴与任意倾斜角度叶片的碰撞判定计算。3)改进液滴与叶片碰撞后的弹跳方向计算方法,利用蒙特卡洛模拟近似出叶片微观结构对液滴弹跳方向的扰动。
2 液滴与任意倾斜角度叶片的碰撞行为的研究
2.1 任意倾斜叶片上液滴前进角与后退角的测量
要判断液滴与倾斜叶片碰撞后是否弹跳,首先必须求得液滴在倾斜叶片上的前进角与后退角大小。为此,本文利用接触角测量仪JC2000C1,通过微距摄像头近距离拍摄体积相同而叶片倾角不同的液滴图像后,测量其前进角与后退角,并利用线性插值方法来求解处于二者之间任意点P位置的静态接触角大小,如图3所示。具体步骤如下:
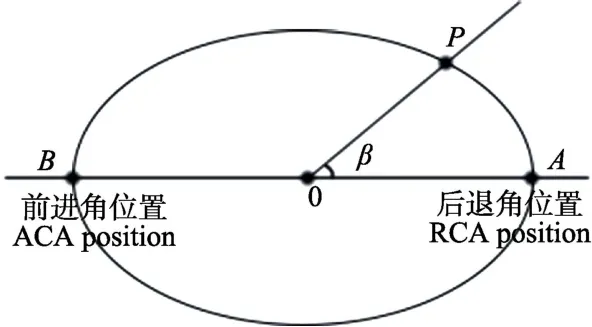
图3 液滴俯视示意图Fig.3 Top view of droplet
1)选取处于分蘖期的水稻丰两优6号和台中本地1号(TN1)叶片若干,正面朝上平整固定于洁净的载玻片上,调整灯光大小使液滴的轮廓与背景分离,调整摄像头与液滴间的距离,使得液滴周围轮廓清晰。
2)利用毛细滴管挤压出0.1,0.15,0.2以及2.5μL(粒径为576、659、725和1 684 mm)的蒸馏水,缓缓提升云台以使液滴轻轻附着在叶片上方,然后水平放置载玻片获取玻片水平状态下液滴的图像。受试验条件限制,更小粒径液滴难以滴落且易快速蒸发,误差较大。
3)轻轻将载玻片抬升一段高度使得叶片处于倾斜状态,获取此时液滴的图像。载玻片不断抬升,使得叶片的处于不同的倾角,然后分别对液滴的图像进行采样(部分结果如图4所示)。
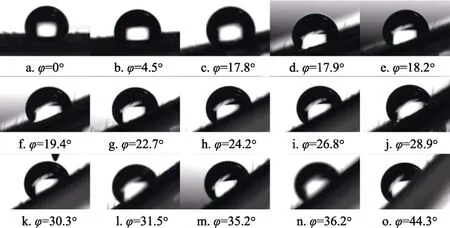
图4 微距摄像头采样不同倾角叶片上的液滴Fig.4 Sample droplets on blades at different angles of inclination using macro camera
4)测量每一张图像上叶片的倾角、液滴的前进角与后退角。如图5所示,点A和点C标定出了载玻片所在的平面,点B为液滴边缘与载玻片的交点,点E为液滴的顶点,而点D为连接点B与点E圆弧中的点。根据B、D、E三点计算出液滴与载玻片交点的曲率。由于手动标点存在误差,因此在C和点E之间多次选取不同的点D位置以获得多个曲率值,再根据曲率的算术平均最后由软件获得接触角的实际大小。
图 5给出了利用五点拟合法计算该液滴前进角的示意图,若要计算液滴的后退角,只需将C、D、E三点标定在后退角所在的半圆弧即可。若A、B两点的坐标已知,则利用正切函数即可计算出液滴所在载玻片的倾斜角度α:

式中点A和点B的坐标为(A.x,A.y),(B.x,B.y)。

图5 基于五点拟合法的液滴静态接触角计算Fig.5 Calculation of static contact angle of droplet based on five-point fitting method
2.2 液滴任意位置静态接触角的线性插值
在水平叶片上,液滴的前进角与后退角大小一致,因此液滴各个位置插值所得到的静态接触角大小也是一样的。当叶片由水平状态向倾斜状态转变时,随着叶片倾斜角的变化,液滴的前进角θ1变大,而后退角θ2减小。由上文 2.1节所获得的静态接触角大小随叶片倾角的数值拟合结果,故可知前进角θ1、后退角θ2与叶片倾角α的关系为:

再利用线性插值δ函数来计算前进角与后退角中间点任意位置处的静态接触角θ:

式中的β角为点线段OP与OA之间的夹角且满足 0°<β<180°,如图 3所示。将θ1与θ2代入上式中,即可求得倾斜叶片上液滴任意位置上的静态接触角的大小:

2.3 液滴弹跳行为的判定
在文献[27]中,为判定液滴与水平叶片碰撞后是否弹跳,他们先基于能量守恒原理求出液滴回退阶段结束时的剩余能量值,具体求解方式如公式(3)。若剩余能量大于零则判定其为弹跳。在公式(3)中,液滴本身的属性,如密度、静态接触角等是已知的,唯一要求得的是液滴的扩展半径dm。换言之,需要先通过公式(1)求得液滴的扩展半径,然后才能计算剩余能量。公式(1)是一个求解dm/D变量的一元三次方程,此处引入过渡参数p与q代替其余参数可得:
其中p与q的具体数值如下:

上文1.1节提到当叶片由水平变为倾斜时,其上液滴的前进角与后退角不再相等,液滴的静态接触角也不再是一个恒定不变的值,其变化规律如2.2节中公式(8)所示。为将公式(1)与公式(3)扩展到倾斜叶片上,需要对公式(1)与公式(3)中静态接触角的计算方法进行改进。在求液滴碰撞dm/D的数值时,将p与q两个过渡参数表达式中静态接触角θe按照公式(8)的规律进行积分,得到如下公式:
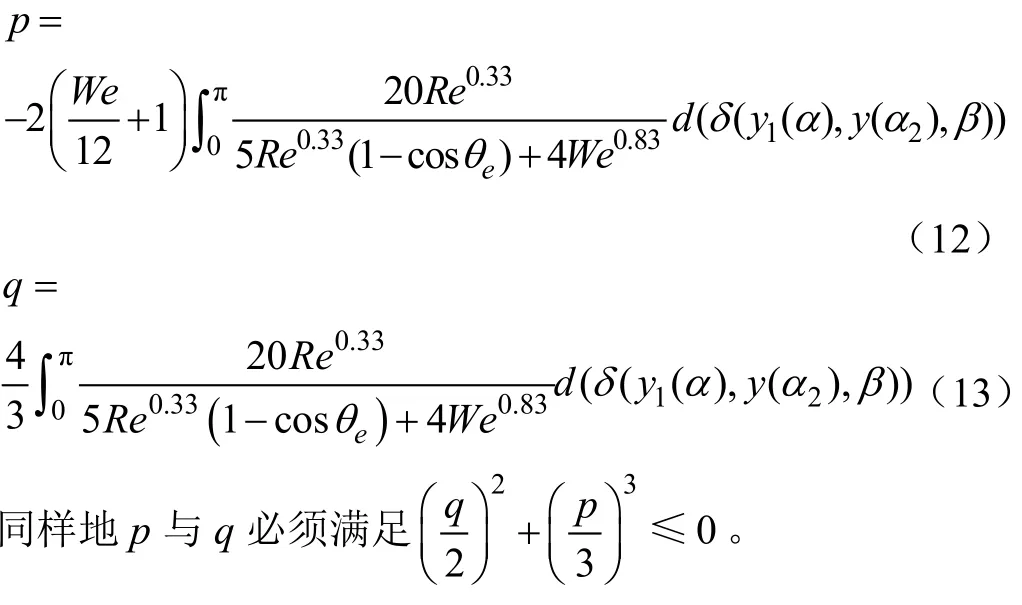
随后将p与q的具体数值后代入公式(9),就能求得dm/D。然后将公式(3)剩余能量计算公式中的静态接触角参数进行同样的积分处理,可得:
式中EERE是液滴剩余能量大小,将dm/D代入公式(14)中,即可求得液滴剩余能量的大小。若剩余能量大于零,则判定液滴撞击倾斜叶片后将会发生弹跳。
2.4 液滴弹跳判定后速度和弹跳方向的计算
弹跳判定后液滴的速度将会发生变化,主要包括速度大小以及弹跳方向。弹跳速度大小Vexit的计算采用文献[27]提出的公式:
式中ρ指蒸馏水密度(取 1.0×10³ kg/m3)。雾滴从叶片上的弹跳方向,具有一定的随机性,很难预测,但众多雾滴在叶片上的弹跳则遵循一定的统计规律。蒙特卡洛方法(Monte Carlo method)是一种以概率统计理论为指导的一类非常重要的数值计算方法。它使用随机数(或更常见的伪随机数)来解决一些自身规律复杂很难预测但是结果却易于统计的问题。因此,使用蒙特卡洛思想来解决液滴碰撞叶片后弹跳方向的判定,不失为一种有效的方法。如图6所示,X和Z分别为碰撞面的横轴和纵轴,N为碰撞面的法向量,L为液滴的入射方向,L′为液滴遵循镜面反射原理时候的液滴弹跳方向,L1′,L2′,L3′和L4′为液滴被叶片表面粗糙度等扰动后的弹跳方向;L′与Li′之间的夹角被称为扰动角度。因此只要求得扰动角度的大小,在镜面反射弹跳方向L′的基础上加上扰动角度就能求得液滴被扰动后的弹跳方向出现。

图6 液滴弹跳的镜面反射方向与扰动后的方向Fig.6 Bounce directions of droplets after specular reflection and after disturbance
液滴与叶片碰撞后的扰动角度与叶片的表面特性有关,例如当叶表面多茸毛时,液滴弹跳方向改变较大。为了模拟液滴与叶片碰撞后的扰动,本文将叶面的粗糙度作为扰动因子,粗糙度越大,则扰动角度越大,反之,若叶片表面粗糙度越小,则扰动角度越小,而当叶片表面粗糙度为零,液滴的反射速度方向遵循镜面反射原理。文献[28]中利用蒙特卡洛法选用正态分布作为概率密度函数,模拟了无限高处雨滴与物体碰撞后的破碎方向,有较好的效果,因此本文也利用正态分布概率密度函数用蒙特卡洛法来计算扰动角度。比对正态分布函数的参数,本文将粗糙度的大小与正态分布的标准差参数σ对应,其取值范围为(0,+∞)。当σ越大则函数图像越发散,表现为叶片的粗糙度越大,对液滴弹跳方向的扰动也越大,扰动角度也越大;当σ趋近0时,表示该叶片为无茸毛光滑叶片,液滴弹跳符合镜面对称规则。
正态分布的解析式转化为如下所示:

式中x表示扰动角度大小,(°);R(x)表示当扰动角度大小为x时的概率大小,换言之R(x)既为扰动角度x的概率密度函数。ω为液滴最大扰动角度,(°),以使得利用蒙特卡洛法求得的扰动角度不至于过大影响渲染效果。获得扰动角度大小的概率密度函数后,就能利用蒙特卡洛法求出扰动角度。蒙特卡洛法模拟主要包含:选定随机范围、在随机范围内抽样获得随机样本、对随机样本进行筛选并判断其是否符合要求、进行必要的数学计算从而最终求出结果。本文利用该方法计算扰动角度的具体步骤如下:
Step 1:确定蒙特卡洛法的随机区域范围。如图7所示,根据上文选定的概率密度函数可知随机区域范围为由x轴方向(-ω,ω)以及y轴方向(0,R(x))所组成的矩形。
Step 2:在区域范围内随机一个点N,N.x与N.y分别为N在x轴与y轴上的坐标且满足在随机区域的范围之内。
Step 3:判断点N是否落在概率密度函数之内,即图7中灰色部分,若该值处于白色区域中,则返回step 2。
Step 4:计算扰动角度大小。
图7 蒙特卡洛法概率密度函数的随机区域Fig.7 Random region of probability density function of Monte Carlo method
求得扰动角度之后,将液滴弹跳的镜面反射方向加上扰动角度,获得其被扰动后的弹跳方向,如图6中L1′,L2′,L3′和L4′所示,该弹跳方向为被叶片表面粗糙度扰动后的弹跳方向。
3 试验结果与讨论
3.1 静态接触角的测量
为得到液滴在倾斜叶片上相对较为精确的前进角与后退角,同时归纳出随着叶片倾斜角变化前进角与后退角变化的规律,基于试验的方式得到液滴在倾斜叶片上的前进角与后退角,详细步骤见2.1节。试验过程中,利用 JC2000C1接触角测量仪来进行微距拍摄。利用Microliter Syringes微量进样器(5和10μL装)进行液滴大小的控制,液滴种类选用蒸馏水。在叶片的选择上,为了让前进角与后退角的变化差异较大,本文选用疏水性较好的水稻作物叶片,品种为丰两优6号、TN1。采样得到液滴原始图像之后利用五点法计算叶片倾角,液滴前进角与后退角,经过对试验数据的拟合,获得如图 8所示结果。

图8 拟合的前进角与后退角关系Fig.8 Fitting relationship between advacing and receding contact angles
从图 8中可以看出,随着叶片倾角的逐步增大,前进角与后退角逐步呈线性变化。两条拟合直线相关系数R2分别为0.946 7和0.912 2,并且二者显著性P值(P-value)<0.05,有较高的模拟精度。
3.2 利用蒙特卡洛方法模拟液滴的弹跳方向
基于 2.4小节中利用蒙特卡洛法模拟叶片表面复杂物理特性对液滴弹跳方向的扰动的算法思想,该文对雾滴与倾斜叶片碰撞后弹跳的方向进行了计算机模拟。碰撞后液滴的弹跳方向同叶表面粗糙度密切相关。根据粗糙度不同,本文利用粒子簇来模拟现实世界的水柱,粒子簇中的粒子以一定的初速度撞击碰撞盒,在模拟试验中,本文利用 4种不同的粗糙度的碰撞盒与粒子簇进行交互,试验粒子体积为2.5μL,粒径为1 684 mm,效果如图9所示。图9a为碰撞盒粗糙度为0.0的情况下,粒子簇的弹跳方向基本没有扰动的情况,弹跳方向与入射方向符合镜面反射原理。图9b~9d的粗糙度σ分别设为1.0、2.0和5.0。当粗糙度不为零时,粒子簇弹跳方向出现扩散现象。σ等于1.0时,粒子簇弹跳方向呈现小幅扰动(图 9b),随着粗糙度模拟值的增大,粒子簇的弹跳方向的扰动幅度也逐步增大(图9c~图9d)。
图9 不同粗糙度对粒子的反射速度方向扰动Fig.9 Disturbances of bounce directions with different roughness
图9a为碰撞盒粗糙度为零的情况下,粒子簇的弹跳方向基本没有扰动的情况,弹跳方向与入射方向符合镜面反射原理。图9b到图9d中随着碰撞盒的粗糙度逐渐提升,粒子簇的弹跳方向被扰动的幅度逐步提升。
3.3 液滴与任意倾角叶片的交互行为模拟
在模拟液滴与任意倾角叶片碰撞的交互行为之中,本文改进了Mao运用于水平叶片的弹跳判定公式以及剩余能量公式[27],使得其能够适用在任意倾角的叶片之中。为了获取弹跳判定所需要的前进角与后退角的值,通过试验获得了液滴在不同倾角叶片上的前进接触角和后退接触角的大小。最后利用蒙特卡洛法扰动液滴的弹跳方向用以替代传统粗糙的镜面反射。相比于基于物理规律的液滴弹跳方向模拟,这种方法能够减少计算量,增加渲染效率。
本文实现了上述算法思想,所用机器配置为2.60 Hz四核处理器,NVDIA Geforce GT650M显示适配器。利用贝塞尔曲线模拟叶片边缘,利用GPU的并行能力模拟雾滴场,计算雾滴与叶片的碰撞。本文中每个液滴的运动过程是独立计算的。单个粒子的生命过程中,一般会经历“发射-下落-碰撞-弹跳检测-弹跳”这一过程。为贴近农业上的喷雾场景,本文将粒子簇以锥形方向喷出,在外力作用下,粒子以不同角度与叶面发生碰撞。在2.3中我们提出了一种倾斜叶面上基于剩余能量计算的弹跳判定方法。2.4中计算了发生弹跳液滴的弹跳速度和方向,并通过蒙特卡洛方法模拟了叶面粗糙度对弹跳的影响,增加了弹跳液滴的扰动。若发生扰动,则最终反弹角度为镜面出射角度与扰动角度之和,有别于镜面弹跳,这使得模拟效果更为逼真。如图10所示,随着叶片倾角的越来越大,碰撞时液滴的速度与法向量夹角越大,使得液滴碰撞后平均剩余能量减小,越多的粒子依附在叶片上面。这基本符合现实的情况。在液滴的弹跳方向上没有了镜面反射时候所产生的单一方向,弹跳的粒子随机分布于反射方向上的空间内。
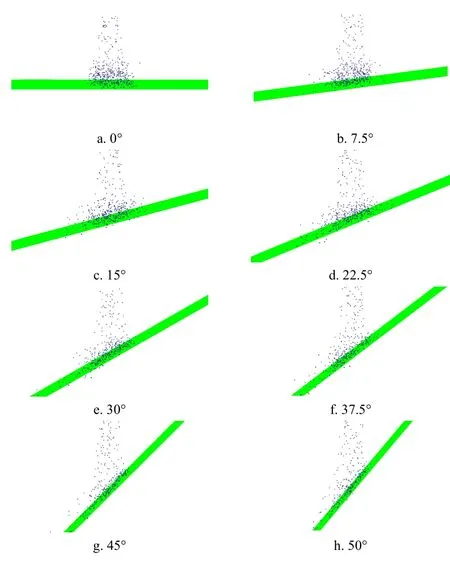
图10 不同倾角下液滴与叶片的碰撞行为Fig.10 Collision behavior between droplets and blades at different inclination angle
3.4 讨 论
1)利用五点法获取采样图像上的前进角与后退角时,由于人工取样特征点存在着误差,因此对于图 5所示特征点D,需要进行 5次以上的采样次数来计算相应的角度,使得获得的角度准确可靠。然而利用手动选取采样点的方式无法避免产生误差,因此在以后拟利用图像处理的方法,引入边缘提取算子来获取液滴轮廓,进而计算液滴的前进角与后退角。
2)本文利用了有疏水特性的水稻叶片来进行前进角与后退角的测量试验,目的是为了增加前进角与后退角之间的差异,若采用亲水性的植物叶片将导致前进角与后退角之间的大小差异过小,无法直观的探究液滴随着叶片倾角变化而改变的规律。
3)试验倾斜角范围设置:受到接触角测量仪的结构限制,以及大倾斜角易使液滴直接滚落的影响,本文将试验过程中的叶片倾角范围限制 0°~50°之间,高于 50°时,液滴易离开摄像机的视线范围而导致采样失败。同时考虑到液滴在试验过程中的蒸发,使得液滴的体积逐渐减小进而影响其静态接触角大小,过大的叶片倾斜范围会使得采样密度过小,导致前进角与后退角变化规律拟合过程中出现偏差。
4)在利用蒙特卡洛法扰动液滴弹跳方向的时候,由于正态分布的定义域为(-∞,∞),尽管离中心越远值域也趋向于零,但其大小却并不为零。这也意味着液滴可能会因为扰动角度大于 90°而使得弹跳方向与入射方向处于同一边,甚至于扰动角度与弹跳角度重合,然而在现实中不可能有这样的情况。为了杜绝这一种可能,我们规定液滴的扰动角度不超过90°,使得液滴的弹跳方向与入射方向处在法向量所在平面的两侧。
5)由于缺乏现实中叶片粗糙度与正态分布中粗糙度参数的映射关系,本文仅以可视化效果以及与现实中的对比作为粗糙度选择的标准。本文结论 3.2和 3.3中设σ=0,1.0,2.0和5.0,但是在实际中不同叶片的粗糙度不同,单纯以可视化效果作为标准来运用蒙特卡洛法对叶片的弹跳方向作为扰动显然不符合标准。文献[25]和文献[29]引入统计的概念,利用试验的方式求得参数后,再利用离散格子玻尔兹曼方法成功模拟了液滴与倾斜表面的碰撞和弹跳。因此,在未来的研究中,本文也拟用液滴与叶片碰撞试验来获取液滴弹跳方向的分布规律,然后将分布规律拟合正态分布,从而最终求出液滴被扰动角度的方差,进而求出粗糙度。
6)值得说明的是,本文没有直接对水稻叶片进行测量和模拟,而是基于本课题组已经发表的成果。具体试验过程和技术细节请参见文献[30]。
4 结 论
本文通过基于试验的数据与物理规律结合的方式,模拟了液滴与任意角度倾斜叶片的交互行为。主要工作包括:1)利用微距摄像头获取液滴在不同叶片倾角下的前进角与后退角数值,并且拟合了其变化规律。2)改进液滴弹跳判定公式,使其适用于液滴和任意倾斜叶片的碰撞。3)利用蒙特卡洛法计算液滴的弹跳方向,代替了简单的镜面反射模拟液滴的弹跳方向。
在未来的工作中,在测量液滴前进角与后退角的试验中,拟将叶片的倾斜角度扩展到90°。引入不同试剂以及不同的液滴尺寸,以更精确地提取液滴轮廓来计算液滴的静态接触角,代替人为标定特征点的五点法来处理采样的液滴图片,从而使得静态接触角的数据在处理阶段更加精确。拟通过喷头试验测量弹跳液滴的分布情况来拟合正态分布模型,从而对不同的植物测得其粗糙度,使得蒙特卡洛模拟液滴弹跳方向更加真实。
[1] 何雄奎.改变我国植保机械和施药技术严重落后的现状.农业工程学报,2004,20(1):13-15.He Xiongkui. Improving severe draggling actuality of plant protection machinery and its application techniques[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(1): 13-15. (in Chinese with English abstract)
[2] 王穗,彭尔端,吴国星,等.农药雾滴在作物上的沉积量和其分布规律的研究概述[J].云南农业大学学报,2010,25(1):113-117.Wang Sui, Peng Erduan, Wu Guoxing, et al. Surveys of deposition and distribution pattern of pesticide droplets on crop leaves[J]. Journal of Yunnan Agricultural University,2010, 25(1): 113-117. (in Chinese with English abstract)
[3] 袁会珠,郑加强,何雄奎,等.农药使用技术指南[M].北京:化学工业出版社,2004.
[4] 杨希娃,代美灵,宋坚利,等.雾滴大小、叶片表面特性与倾角对农药沉积量的影响[J].农业工程学报,2012,28(03):70-73.Yang Xiwa, Dai Meiling, Song Jianli, et al. Effect of droplet size, leaf characteristics and angle on pesticide deposition[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(3): 70-73. (in Chinese with English abstract)
[5] 徐广春,顾中言,徐德进,等.稻叶表面特性及雾滴在倾角稻叶上的沉积行为[J].中国农业科学,2014,47(2):4280-4290.Xu Guangchun, Gu Zhongyan, Xu Dejin, et al. Characteristics of rice leaf surface and droplets deposition behavior on rice leaf surface with different inclination angles[J]. Scientia Agricultura Sinica, 2014, 47(2): 4280-4290. (in Chinese with English abstract)
[6] 朱金文,吴慧明,程敬丽,等.雾滴体积中径与施药量对毒死蜱在棉花叶片沉积的影响[J].棉花学报,2004,16(2):123-125.Zhu Jinwen, Wu Huiming, Cheng Jingli, et al. Influence of droplet sizes and spray volume on deposition of chlorpyrifos on cotton leaves[J]. Acta Gossypii Sinica, 2004, 16(2): 123-125. (in Chinese with English abstract)
[7] 朱金文,吴慧明,孙立峰,等.叶片倾角、雾滴大小与施药液量对毒死蜱在水稻植株沉积的影响[J].植物保护学报, 2004,31(3):259-263.Zhu Jinwen, Wu Huiming, Sun Lifeng, et al. Influence of leaf incline angle, droplet size and spray volume on deposition of chlorpyrifos on rice plants[J]. Journal of Plant Protection,2004, 31(3): 259-263. (in Chinese with English abstract)
[8] 徐德进,顾中言,徐广春,等.喷雾方式对农药雾滴在水稻群体内沉积分布的影响.中国农业科学,2014,47(1):69-79.Xu Dejin, Gu Zhongyan, Xu Guangchun, et al. Influence of spray method on the deposit and distribution of spray droplets in rice field[J]. Scientia Agricultura Sinica, 2014,47(1): 69-79. (in Chinese with English abstract)
[9] 傅泽田,王俊,祁力钧,等.果园风送式喷雾机气流速度场模拟及试验验证[J].农业工程学报,2009,25(1):69-74.Fu Zetian, Wang Jun, Qi Lijun, et al. CFD simulation and experimental verification of air-velocity distribution of air-assisted orchard sprayer[J] . Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2009, 25(1): 69-74. (in Chinese with English abstract)
[10] 陈发元,汪小旵,丁为民,等.果树喷雾用圆盘风扇三维气流速度场数值模拟与验证[J].农业机械学报.2010,41(8):51-55.Chen Fayuan, Wang Xiaochan, Ding Weimin, et al.Numerical simulation and experimental verification of 3-D air-velocity field of disk fan used in orchard sprayer[J].Transactions of the Chinese Society for Agricultural Machinery, 2010, 41(8): 51-55. (in Chinese with English abstract)
[11] 宋淑然,洪添胜,王卫星,等.水稻田农药喷雾分布与雾滴沉积量的试验分析[J].农业机械学报,2004,35(6):90-93.Song Suran, Hong Tiansheng, Wang Weixing, et al. Testing analysis on deposit and distribution of pesticide spraying in rice fields[J]. Transactions of the Chinese Society of Agricultural Machinery, 2004, 35(6): 90-93. (in Chinese with English abstract)
[12] 孙国祥,李永博,汪小旵,等.背负式喷雾器雾滴分布特性的CFD模拟与试验[J].农业工程学报,2012,28(20):73-79.Sun Guoxiang, Li Yongbo, Wang Xiaochan, et al. CFD simulation and experiment of distribution characteristics for droplet of knapsack sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(20): 73-79. (in Chinese with English abstract)
[13] 郭焱,李保国.虚拟植物的研究进展[J]. 科学通报,2001,46(1):1-5.Guo Yan, Li Baoguo. New advances in virtual plant research[J]. Chinese Science Bulletin, 2001, 46(1): 1-5. (in Chinese with English abstract)
[14] Fan X R, Kang M Z, Heuvelink E, et al. A knowledge-anddata-driven modeling approach for simulating plant growth:A case study on tomato growth[J]. Ecological Modelling,2015, 312: 363-373.
[15] Prusinkiewicz P, Rollandlagan A G. Modeling plant morphogenesis[J]. Current Opinion in Plant Biology, 2006,9(1):83.
[16] Dorr G J, Hanan J, Woods N, et al. Combining spray drift and plant architecture modeling to minimise environmental and public health risk of pesticide application[J]. Modsim International Congress on Modelling & Simulation Advances& Applications for Management & Decision Making, 2005,1(3):1499-1500.
[17] Caunce J, Elvin A, Fulford G, et al. Process driven models for spray retention by plants[J]. Proceedings of the 2006 Mathematics-In-Industry Study Group, 2006: 57-85.
[18] Corinne Robert F, Christian Fournier, Bruno Andrieu, et al.Coupling a 3D virtual wheat (Triticum aestivum) plant model with a Septoria tritici epidemic model (Septo3D): A new approach to investigate plant–pathogen interactions linked to canopy architecture[J]. Functional Plant Biology, 2008,35(1/2): 997-1013.
[19] 李界光,唐丽玉,陈崇成. 基于虚拟植物的冠层内生菌空间分布可视化[J]. 中南林业科技大学学报,2012,32(6):138-141.Li Jieguang, Tang Liyu, Chen Congcheng. Visualization of canopy endophytes space distribution based on virtual plant[J]. Journal of Central South University of Forestry &Technology, 2012, 32(6): 138-141. (in Chinese with English abstract)
[20] Hanan J, Prusinkiewicz P, Zalucki M, et al. Simulation of insect movement with respect to plant architecture and morphogenesis[J]. Computers and Electronics in Agriculture,2002, 35: 255–269.
[21] Hanan J, Renton M, Yorston E. Simulating and visualiing spray deposition on plant canopies[C]. International Conference on Computer Graphics and Interactive Techniques February. 2003: 259-260.
[22] Dorr G, Hanan J, Adkins S, et al. Spray deposition on plant surfaces: A modeling approach[J]. Functional Plant Biology,2008, 35: 988-996.
[23] Yoon S S, Desjardin P E. Modelling spray impingement using linear stability theories for droplet shattering[J].International Journal for Numerical Methods in Fluids, 2006,50(4): 469-489.
[24] Losasso F, Gibou F, Fedkiw R. Simulating water and smoke with an octree data structure[J]. ACM Transactions on Graphics, ACM Press, 2004, 23(3): 457-462.
[25] Raman K A, Jaiman R K, Lee T S, et al. Lattice Boltzmann study on the dynamics of successive droplets impact on a solid surface[J]. Chemical Engineering Science, 2016, 145:181-195.
[26] Dorr G J, Kempthorne D M, Mayo L C, et al. Towards a model of spray–canopy interactions: Interception, shatter,bounce and retention of droplets on horizontal leaves[J].Ecological Modelling, 2014, 290(C): 94-101.
[27] Mao T, Kuhn D C S, Tran H. Spread and rebound of liquid droplets upon impact on flat surfaces[J]. Aiche Journal, 1997,43(9): 2169–2179.
[28] Saint-Jean S, Chelle M, Huber L. Modelling water transfer by rain-splash in a 3D canopy using Monte Carlo integration[J].Agricultural & Forest Meteorology, 2004, 121(121): 183-196.
[29] Raman K A, Jaiman R K, Lee T S, et al. Lattice Boltzmann simulations of droplet impact onto surfaces with varying wettabilities[J]. International Journal of Heat & Mass Transfer, 2016, 95: 336-354.
[30] 丁维龙,谢涛,徐利锋,等.一种基于虚拟模型的水稻冠层叶面积计算方法[J].农业工程学报,2017,33(2):192-198.Ding Weilong, Xie Tao, Xu Lifeng, et al. A calculation method of rice canopy leaf area based on virtual model[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(2): 192-198. (in Chinese with English abstract)
Behavior analysis of spray droplet interacting with plant leaves based on virtual model
Ding Weilong1, Jin Mengjie1, Luo Linfeng1, Wu Fuli1※, Xu Lifeng1, Ji Guangmei2, Zhu Defeng2
(1.College of Computer Science & Technology, Zhejiang University of Technology, Hangzhou310023,China;2.State Key Laboratory of Rice Biology, China National Rice Research Institute, Hangzhou310006,China)
More scholars in recent years have interest in studying the interaction between spray droplets and leaves. However,due to limitations on the computational efficiency of the computer, the physical-based approaches to simulate the processes cannot meet the requirements on both rendering efficiency and considering physical laws at the same time. Aiming at the limitation of traditional simulation on interactions between droplets and leaves, which can only be applied to horizontal leaves,an experiment-based simulation method on interactions between droplets and any leaves, together with a new algorithm on bounce direction of droplets was proposed in this study in order to improve the situation of overly cost calculation time yet poor on accuracy on fluid mechanics of the popular spray models used currently. The interaction between droplets and leaves was simulated based on the experimental results in this paper by combining the improved algorithms based on the predecessors of existing formulas. As the first step, the macro-high-speed camera was used to monitor droplet on the leaf at different angles among 0°~50° of inclination, and measure its static contact angle size. Then the pattern of changes on the static contact angle of the droplet was fitted when the leaf inclination angle was increasing, and generalizing the existing bounce judgment formula to any inclined leaf. Finally, the Monte Carlo method was introduced to calculate the direction of droplet bounce. Instead of using the original specular reflection, the direction of droplet bounce was not in accordance with a single track to run, but turbulent as a sector, making it more consistent with the real environment. The simulation in this study was carried out on the platform of Windows8 Operating System, and using OpenGL to simulate the interaction between droplets and leaves.Simulation results showed that this method can reflect the physical law of collision, bounce judgment, dwell and splash of droplet with any inclined leaf. Besides, simulation in this study prevented the abuse of computational work load caused by the fluid mechanics formulas, and furthermore, the Monte Carlo perturbation was used instead of specular reflection ,making the simulation process in the calculation relatively small while at the same time being more in line with the actual physical laws.This study provides a new way to look into the interaction between droplets and leaves, supporting the calculation on the deposition amount of plant canopy interacting with a large number of droplets, and also possibilities for real-time rendering of large-scale plant scene and fog field interaction.
mechanization; pesticides; spraying; virtual model; spray droplets; plant leaves; interactive behavior analysis
10.11975/j.issn.1002-6819.2017.14.006
TP391
A
1002-6819(2017)-14-0040-09
丁维龙,金梦杰,罗临风,吴福理,徐利锋,姬广梅,朱德峰. 基于虚拟模型的雾滴与叶片的交互行为分析[J]. 农业工程学报,2017,33(14):40-48.
10.11975/j.issn.1002-6819.2017.14.006 http://www.tcsae.org
Ding Weilong, Jin Mengjie, Luo Linfeng, Wu Fuli, Xu Lifeng, Ji Guangmei, Zhu Defeng. Behavior analysis of spray droplet interacting with plant leaves based on virtual model[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2017, 33(14): 40-48. (in Chinese with English abstract)
doi:10.11975/j.issn.1002-6819.2017.14.006 http://www.tcsae.org
2016-12-31
2017-07-08
国家自然科学基金资助项目(61571400,31471416);浙江省自然科学基金资助项目(LY14C130015)
丁维龙,男,安徽萧县人,博士,教授,博士生导师,研究方向为虚拟植物模拟。杭州 浙江工业大学计算机科学与技术学院,310023。
Email:wlding@zjut.edu.cn.
※通信作者:吴福理,男,安徽安庆人,博士,副教授,主要从事计算机图形学、医学图像可视化和计算机科学可视化等领域研究。杭州 浙江工业大学计算机科学与技术学院,310023。Email:fuliwu@zjut.edu.cn.
中国农业工程学会会员:丁维龙(E041200291S)
