基于MSK4310的模拟控制伺服系统设计
2017-11-24陈子玮冯小强王万雷
杨 帆 陈子玮 白 雷 冯小强 王万雷 付 士
基于MSK4310的模拟控制伺服系统设计
杨 帆 陈子玮 白 雷 冯小强 王万雷 付 士
(湖北三江航天红峰控制有限公司,孝感 432000)
为满足伺服系统体积小、质量轻、负载大、低气压环境的要求,设计了一种基于无刷电机驱动器MSK4310的模拟控制伺服系统。本文从电路设计、结构设计、仿真分析三方面详细分析阐述,并根据产品试验测试论证系统性能完成情况。采用用无刷电机驱动器和无刷直流电机构成的模拟控制伺服系统满足设计需求,具有功能完善、结构简化的特点,产品技术成熟、质量可靠应用前景广。
MSK4310;无刷电机;伺服系统
1 引言
针对系统刚度高、偏转角度精度高、动态特性好、低气压工作环境的要求,设计一种基于无刷电机驱动器MSK4310的伺服系统。该系统由于工作在低气压环境,因此采用无刷直流电机作为控制对象。系统与上位机通信收发接口均使用模拟信号,为简化电路机构、保证质量可靠性,选用模拟控制方式。系统中控制信号、反馈信号通过有源滤波器处理后参与控制算法实现闭环控制。控制算法实现电路输出量连接无刷电机驱动器驱动电机旋转。
相对于传统分立元件MOSFET搭建三相桥电路作为功率驱动电路,选用集成电路无刷电机驱动器MSK4310具有结构体积较小、外围电路配置简单、无需HALL信号解码回路设计等优点,驱动无刷无刷直流电机搭建的伺服控制系统,集成化高、调速范围广、质量体积小、能效比高,在伺服系统领域有良好的推广应用前景。
2 系统方案
伺服系统由两个机电做动作、一个控制器及电缆网组成。
控制器接收上位机发出的模拟控制信号,并将控制信号和舵机反馈信号按照一定的控制规律生成电压信号,经驱动电路功率放大后驱动电机转动,电机通过减速机构带动输出轴偏转,实现角度和力矩输出。采用位置传感器敏感舵轴位置并转换为电压信号反馈至控制器,实现伺服系统位置闭环。其系统框图见图1。

图1 系统方案原理图
3 电路设计
3.1 控制器电路原理
控制器分为控制部分和驱动部分。控制部分主要由二次电源、综合放大器、滤波器组成。根据输入和遥测信号进行隔离的要求增加隔离和电源芯片。驱动部分采用无刷电机驱动器,设计外围配置电路。控制器电路原理框图如图2所示。
3.2 主要电路设计
3.2.1 二次电源电路设计
根据控制电路需要,将提供的+28V通过电源模块变换为±15V、±15V1、+5V、±12V等。±15V、+5V用于运放等供电,±15V1用于信号隔离电路供电,±12V用于角度传感器供电,原理图如图3所示。

图3 二次电源电路
3.2.2 隔离电路设计
隔离电路主要是将输入作动器控制信号隔离后用于伺服系统内部控制,将作动器反馈信号隔离后提供给上位机。采用隔离芯片ISO120SG对作动器控制信号和反馈信号进行隔离。
3.2.3 滤波器设计
角度传感器反馈的电压信号是参与系统控制算法的重要控制量之一,考虑信号通过复杂环境条件及伺服系统带宽要求等,对反馈信号设计一个二级低通滤波器。通过设计参数,滤波器衰减斜率为-40dB/10oct,阻尼系数为1.73,截止频率为30Hz,能够有效虑除反馈信号中的高频噪声,确保信号稳定有效等要求。
3.2.4 综合放大器设计
伺服系统采用经典PID控制算法,控制电路对控制信号、反馈信号等进行综合,经比例环节、积分环节、微分环节控制及处理后,最后综合放大输出无刷电机驱动器接收的速度控制信号。
PID控制算法实现,控制信号与反馈信号综合产生误差信号,当误差信号大于零时,驱动信号随误差值增大而增大至饱和,电机调速至最大速度,转动极性控制信号方向保持一致;当误差信号小于零时,电机反向制动,降低电机速度,误差值迅速减小,直至控制信号与反馈信号相同。通过仿真分析、实物对接测试,确定合适参数值,保证伺服系统性能合格。
3.2.5 驱动电路设计
控制信号和反馈信号经综合放大器处理生成驱动模块接收的速度控制信号,用于控制电机转动方向和速度。根据伺服系统要求,设计电流调节电路及制动电路。驱动模块采用MS Kennedy公司的无刷直流电机MSK4310驱动器,其接受电机反馈的霍尔信号,与输入驱动信号比较,实现电机速度闭环,并具有限电流保护功能和制动控制功能。电机选用直流无刷电机,其工作电压28V,额定转速5600r/min,额定转矩0.03N/m。
4 结构设计
4.1 机电作动器组成及工作原理
机电作动器由直流无刷电机、齿轮组、滚珠丝杠副、摇臂输出轴、角度传感器组成。
机电作动器工作原理:机电作动器配电后,电机通过齿轮组减速后驱动滚珠丝杠副运动,将丝杠的旋转运动转化为螺母的直线运动,螺母推动摇臂动作,即当电机在控制系统作用下正反向运动时,经过齿轮组、滚珠丝杠副、摇臂的减速,实现输出轴的正反角度偏转及力矩输出,而与输出轴同轴安装的角度传感器可即时敏感并反馈输出角度的变化。机电作动器工作原理如图4所示。

图4 机电作动器工作原理示意图
4.2 传动机构设计
机电作动器传动机构主要由壳体、减速机构、输出轴等组成,实现与上级机械接口对接、力矩及速度的传递、电机和角度传感器的对接等。
5 仿真分析
建立伺服系统的数学模型如图5所示,模型由位置环、位置经滤波、微分后的速度环、内部电流环组成。

图5 伺服系统模型
5.1 伺服机构时域特性分析
通过仿真分析,在空载条件下,给伺服机构施加2°阶跃信号时,机电作动器的响应曲线如图6所示,上升时间为70ms,满足系统要求的125ms要求。
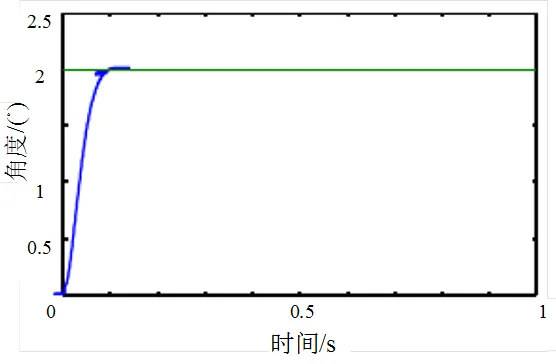
图6 2°时域特性图
5.2 伺服机构频域特性分析
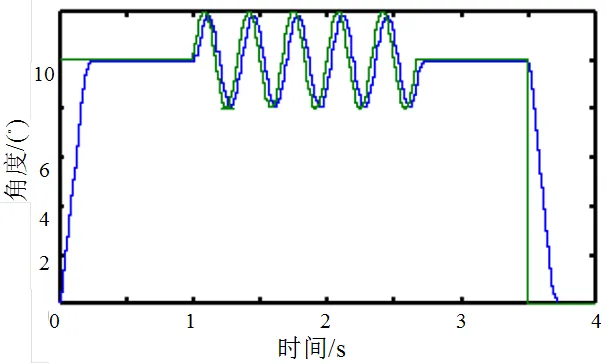
图7 2°、3Hz频率特性图
在1N.m/º弹性负载下,给伺服机构施加2°/3Hz、偏置10°的正弦波信号,响应情况仿真结果见图7,幅频值-0.6dB、相频值-36.2°,满足系统要求。
6 实物测试
伺服系统按要求装配完成后,通过电缆网连接测试仪,进行系统性能测试。伺服机构单项性能测试包括零位测试、位置测试、时域特性、频域特性及死区特性等,检测系统动态特性及系统刚度是否满足要求。
6.1 时域特性测试
在空载带模拟惯量条件下,分别对±1.33V(2°)时域特性进行了测试,测试结果如图8所示。

图8 带惯量±1.33V时域特性曲线
通过上图可以看出,伺服机构在±1.33V、阶跃响应达到90%的上升时间分别为53/51(ms)。伺服机构试验结果均满足上升时间不大于125ms的设计要求。机电作动器带配重惯量模拟实际工作状况,由于惯量是重量6.4kg,直径为100mm的圆柱体,质量大、质心高、惯量矩大,阶跃环节对系统工作造成一定影响,对伺服系统刚度提出很高的要求。
6.2 频域性能测试

图9 带惯量时2°、3Hz响应曲线
伺服机构在带模拟机惯量条件下,2°、3Hz频率特性测试,反馈曲线较好跟随控制曲线,其结果为(-0.575dB,-19.414°)。满足带宽2°、3Hz带宽要求,试验结果见图9。
6.3 死区测试
在空载条件下,施加信号为+0.1°方波,作动器反馈信号测试曲线如图10所示,结果表明系统死区小于0.1°。测试结果表明,伺服系统各项测试满足要求,系统动态特性及系统刚度符合技术需求。

图10 死区测试响应曲线
7 结束语
根据技术要求,设计了一种基于无刷电机驱动器MSK4310的模拟控制伺服系统,经实物测试检验,证明系统性能符合设计需求。伺服系统对空间要求较严、体积小,且机电作动器的负载惯量相对较大,因此要求系统具有良好的刚度,最终通过调整控制环节参数与机电作动器的可控参数实现。此系统采用模拟控制方式,选用无刷直流电机驱动器和直流无刷电机构成,相对于传统模拟控制系统驱动有刷电机,系统体积小、质量轻、效率高、适用低气压环境、寿命长等,且产品技术成熟,在伺服领域具有良好的推广应用前景。
1 陈佰时.电力拖动自动控制系统-运动控制系统[M]. 北京:机械工业出版社,2003
2 敖荣庆.袁坤.伺服系统[M]. 北京:航空工业出版社,2006
3 郁有文.常健.程继红.传感器原理及工程应用[M]. 西安:西安电子科技大学出版社, 2009
4 魏林.无人机载光电任务设备升降机构的控制器设计[J]. 微电机,2015,23(14):46~48
Design of Analog Control Servo System Based on MSK4310
Yang Fan Cheng Ziwei Bai Lei Feng Xiaoqiang Wang Wanlei Fu Shi
(Hubei Sanjiang Space Hongfeng control Co,Ltd., Xiaogan 432000)
In order to meet the requirements of small size, light weight, large load and low pressure environment of servo system, an analog control servo system based on brushless motor driver MSK4310 is designed. The performance of the system is demonstrated according to the product test and is analyzed from the circuit design, the structural design, and the simulation analysis. The analog servo system composed of brushless motor driver and brushless motor has the characteristics of perfect function and simplified structure. The product is mature in technology, reliable in quality and promising in application.
MSK4310;brushless motor;servo system
杨帆(1987),硕士,控制理论与控制工程专业;研究方向:伺服系统设计。
2017-08-24
