EHA半主动悬架时滞补偿控制研究*
2017-11-24寇发荣王哲范养强杜嘉峰李冬
寇发荣 王哲 范养强 杜嘉峰 李冬
(西安科技大学,西安 710054)
EHA半主动悬架时滞补偿控制研究*
寇发荣 王哲 范养强 杜嘉峰 李冬
(西安科技大学,西安 710054)
为了改善汽车平顺性,设计了车辆电动静液压(EHA)半主动悬架结构。计算了EHA半主动悬架系统临界时滞,分析了时滞的影响。提出了一种改进型Smith时滞预估补偿器,并将其应用于模糊控制EHA半主动悬架的时滞补偿,进行了仿真分析和试验验证。结果表明,改进型Smith预估补偿器能够对补偿环节的悬架模型参数误差进行修正,提高了悬架系统的抗干扰能力,可有效减小时滞对该半主动悬架的影响,从而改善其动态性能。
1 前言
悬架是汽车底盘重要的组成部分之一。汽车悬架分为主动悬架、半主动悬架和被动悬架。半主动悬架的减振效果介于被动悬架和主动悬架之间,但能耗较低,引起了国内外学者的广泛关注[1~4]。
研究表明,时滞是干扰半主动悬架动态性能的主要因素之一[5]。文献[6]通过建立含时滞半主动悬架系统仿真模型,分析得到了时滞对悬架系统的影响规律。文献[7]采用预瞄控制策略对含时滞主动悬架进行研究,结果表明,时滞量较大会造成系统控制效果恶化,但未考虑时滞补偿环节悬架模型的误差对系统的影响。
针对以上问题,本研究设计了电动静液压(Electro-Hydrostatic Actuator,EHA)车辆半主动悬架结构[8],通过计算EHA半主动悬架系统的临界时滞,分析时滞对EHA半主动悬架幅频特性和减振效果的影响,提出一种改进型Smith预估补偿器,将其用于模糊控制EHA半主动悬架的时滞补偿,并利用台架试验验证时滞补偿器的有效性。
2 含时滞EHA半主动悬架动力学模型
2.1 EHA半主动悬架结构与原理
EHA半主动悬架的基本结构如图1所示,主要由螺旋弹簧和EHA作动器两部分组成。EHA作动器由液压缸、液压泵、无刷直流电机、控制器构成。同时在车身上安装有加速度传感器,用来检测当前车辆的运动状态并将信号反馈给控制器。在车身的振动作用下,液压缸随动工作,该悬架系统工作在被动状态,系统阻尼力由液压系统的基值阻尼力提供。控制器采集传感器信号,根据模糊控制规则改变电机回路中的外接负载阻值,从而改变电机的电磁转矩大小,使液压缸产生的可控阻尼力得到控制,从而实现EHA半主动悬架系统的闭环运动控制。
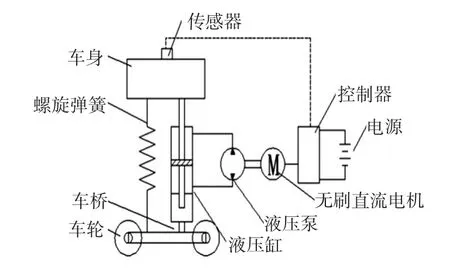
图1 EHA半主动悬架结构原理
2.2 含时滞EHA半主动悬架力学模型的建立
根据图1中EHA半主动悬架的基本结构,建立该悬架车辆二自由度动力学模型,如图2所示。

图2 EHA半主动悬架系统二自由度模型
该悬架减振器的阻尼力u分为基值阻尼力Fs和可控阻尼力Fr。设EHA半主动悬架系统的可控阻尼系数为cr,基值阻尼系数为cs,控制系统的时滞为τ,则:

含时滞EHA半主动悬架汽车二自由度动力学方程为:

式中,z为路面输入激励;kt为轮胎刚度系数;ks为悬架刚度系数;mu为非簧载质量;ms为簧载质量;x1为非簧载质量位移;x2为簧载质量位移。
2.3 含时滞EHA半主动悬架临界时滞计算
EHA半主动悬架系统的临界时滞是系统由渐进稳定状态到失稳的临界时滞值,根据微分方程解的存在条件得到式(2)的非零解特征方程:
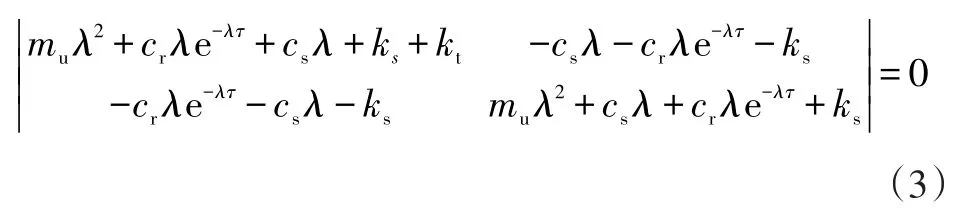
该系统临界失稳条件是特征方程式(3)存在纯虚根λ=iω。将λ=iω代入式(3),同时分离实部和虚部,得到纯虚根的存在条件[9]:

对式(4)进行求解,得到EHA半主动悬架的临界时滞:

当EHA半主动悬架参数一定时,根据式(5)可得可调阻尼cr与临界时滞τ的关系,如图3所示。由图3可以看出,当基值阻尼cs一定时,临界时滞τ随可控阻尼cr的增大而减小,同时临界时滞τ减小的幅度由大到小,当系统可控阻尼足够小时,系统进入全时滞稳定状态。

图3 可控阻尼cr与临界时滞τ的关系
该液压系统在实际工作过程中,cs与cr的不同组合将会引起EHA半主动悬架系统时滞稳定区域的变化,如图4所示。由图4可以看出,当cs/cr>1时,系统将进入全时滞稳定状态。

图4 (cs,cr)平面内全时滞稳定区域
3 EHA半主动悬架模糊时滞补偿控制
3.1 改进型Smith预估补偿器
Smith预估补偿器结构简单,易于实现,是控制领域内比较常用的时滞控制方法之一,但由于其对于模型的误差十分敏感,鲁棒性较差,抗干扰能力不足,制约了其在非线性时变时滞系统领域的应用[10~11]。
本研究在Smith预估补偿器的基础上进行改进,引入了含有一阶惯性滤波的动态反馈环节M(s),其时滞补偿原理如图5所示。其中Gc(s)为控制器传递函数,e-τps为预估滞后环节,e-τ′ps为被控对象实际滞后环节。

图5 改进型Smith预估补偿原理
当时滞补偿模型G′p(s)e-τ′ps出现误差时,为了避免模型误差对系统的影响,对时滞补偿环节的模型偏差进行补偿后,经过一阶惯性滤波环节F(s)滤波后,反馈给控制器,进而减小模型误差对系统的影响,提高了系统时滞补偿效果。
3.2 EHA半主悬架模糊控制器
模糊控制器在工业领域中应用较为广泛,图6所示为模糊控制器结构[12]。
按照EHA半主动悬架的工作原理,选择簧载质量加速度E及其偏差Ec作为控制系统的输入量。选择7个模糊子集对输入和输出量的状态进行表征,即正大(PB)、正中(PM)、正小(PS)、零(ZE)、负小(NS)、负中(NM)和负大(NB),设输入量E和Ec的基本论域都为[-6,6],输出量u的基本论域为[-7,7]。通过MATLAB软件得到输入量E和Ec以及输出量u之间的规则曲线如图7所示。
3.3 EHA半主动悬架模糊时滞补偿控制系统
该系统采用改进型Smith时滞预估补偿器改善EHA半主动悬架的动态特性,采用模糊控制方案提高系统的适应性。EHA半主动悬架系统中的时滞环节较多,例如电机响应时滞、液压油路响应时滞等,因而将改进型Smith预估补偿原理和模糊控制器相结合,得到如图8所示的模糊时滞补偿控制器结构。

图7 模糊推理系统的输入输出曲面

图8 模糊时滞补偿控制器结构
在MATLAB中建立EHA半主动悬架模糊时滞补偿仿真模型。 EHA半主动悬架参数为:kt=150 kN/m,ks=15.734 kN/m,mu=40 kg,ms=250 kg,cs=1 kN·s/m,cr=0~2.5 kN·s/m。EHA作动器的参数为:电机电磁转矩系数K=69 kN·m/A,液压马达排量q=63 mm3/rad,电机电枢电感L=60.5 μH,电机绕组电阻R=0.5 Ω,外界负载电阻Ra=0.1 Ω,液压缸活塞有效面积A=7.657 6×10-4m2。
4 时滞补偿EHA半主动悬架仿真分析
4.1 时滞对EHA半主动悬架的影响
4.1.1 时域内的影响
为了分析时滞对EHA半主动悬架减振效果的影响,建立不含时滞补偿的模糊控制EHA半主动悬架仿真模型,仿真结果如图9所示。

图9 不同时滞的簧载质量加速度
从图9中可以看出,当模糊控制EHA半主动悬架的时滞增大时,其减振效果逐渐降低,且当时滞增大到一定程度时,其减振效果甚至不如被动悬架,时滞继续增大,悬架系统甚至出现失稳现象。因此时滞对模糊控制EHA半主动悬架的减振效果有很大的影响。
4.1.2 频域内的影响
按照频率响应函数的求解过程,对EHA半主动悬架车辆二自由度模型幅频特性进行求解,首先对含时滞的EHA半主动悬架动力学方程进行傅里叶变换:

由式(6)得到路面激励对簧载质量位移的幅频特性:

根据式(7)利用MATLAB/Simulink进行仿真,最终得到不同时滞对EHA半主动悬架二自由度模型幅频特性的影响曲线,如图10所示。
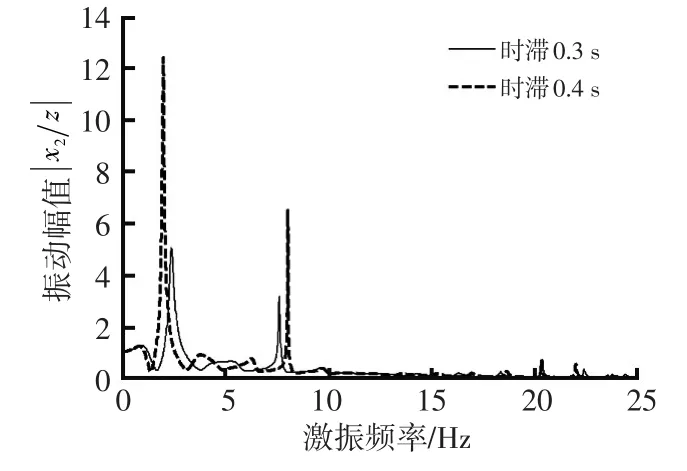
图10 时滞对EHA半主动悬架幅频特性的影响
由图10可知,EHA半主动悬架系统时滞的增大,会引起系统低阶主振型振幅的增大,也会引起一阶、二阶主振型共振频率的相互逼近。当半主动悬架系统的时滞增大到一定限度时,系统的幅频特性曲线将出现多个振峰,说明理论控制力与实际控制力不同步,系统出现了汽车的“轮跳”现象。因此,时滞不仅会影响EHA半主动悬架的控制效果,甚至会因为“轮跳”现象而导致系统失稳从而影响汽车行驶安全性。
4.2 EHA模糊时滞补偿效果分析
根据改进型Smith预估补偿控制器的设计方法,以及EHA半主动悬架模糊时滞补偿仿真模型,在MATLAB中建立含有改进型Smith时滞预估补偿器的模糊控制EHA半主动悬架系统仿真模型,同时建立C级白噪声路面模型,设置模型车速为40 km/h,时滞分别为0.3 s和0.6 s,选择平顺性评价指标为簧载质量加速度和轮胎动载荷,对有时滞补偿和无时滞补偿的模糊控制EHA半主动悬架的减振效果进行仿真对比,仿真结果如图11、图12及表1所示。

图11 时滞为0.3 s时的仿真结果

图12 时滞为0.6 s时的仿真结果
结合图11、图12和表1可以看出:时滞能降低EHA半主动悬架减振性能,且时滞越大,对该半主动悬架性能的影响越大;含时滞补偿的EHA半主动悬架的减振效果优于无时滞补偿的EHA半主动悬架;时滞越大,改进型Smith预估补偿器对EHA半主动悬架的时滞补偿,可以越明显地降低时滞对EHA半主动悬架减振性能和系统稳定性的影响。
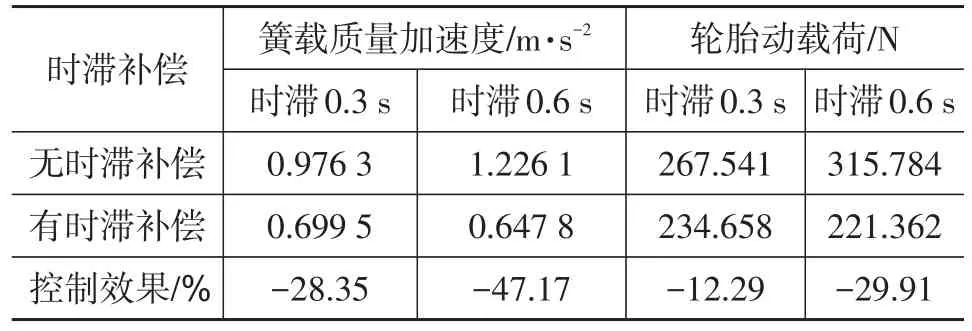
表1 含时滞补偿和无时滞补偿的模糊控制半主动悬架对比
4.3 EHA模糊时滞补偿策略抗干扰能力分析
悬架系统的干扰一般是由汽车系统质量、悬架系统结构参数、控制系统采样误差等因素引起的,这些干扰一般具有随机性和突变性。本文选择随机振荡作为该系统的仿真干扰源,将其施加到时滞补偿环节中。设随机干扰±5时为弱干扰,随机干扰±10时为强干扰,如图13所示。
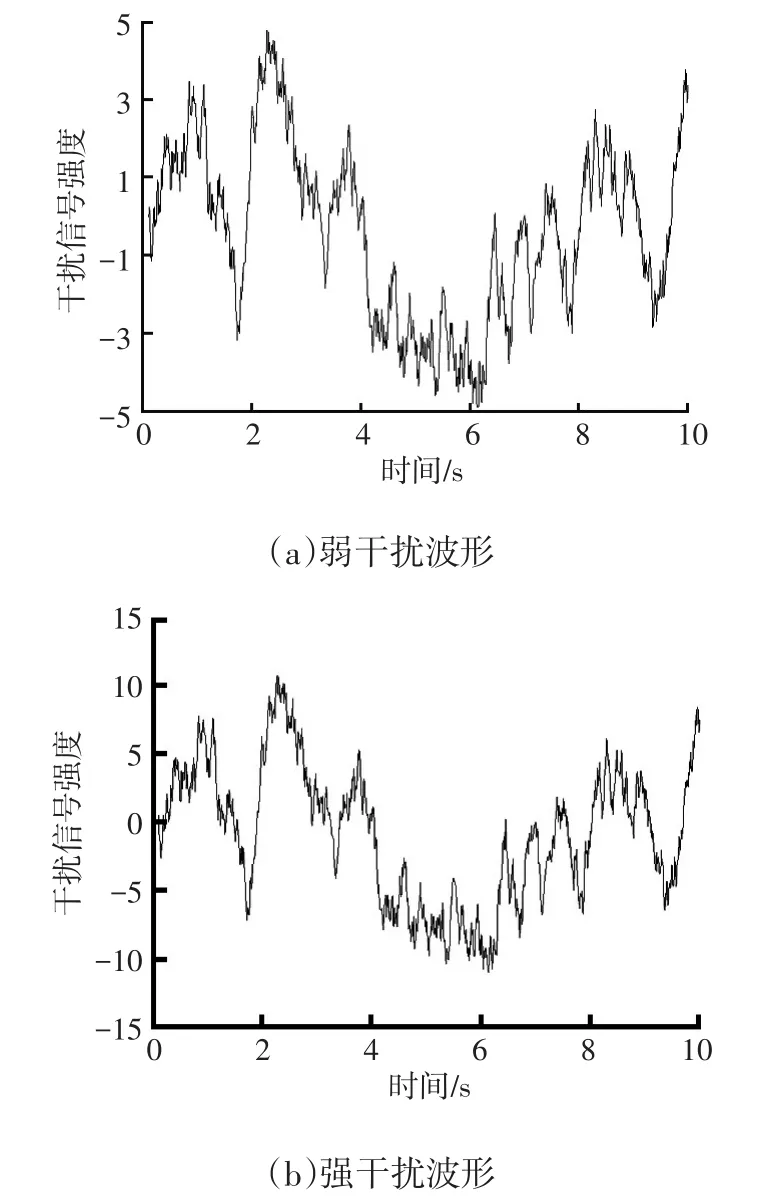
图13 施加于悬架系统的干扰波形
为了分析改进型Smith预估补偿器时滞补偿效果,分别建立Smith和改进型Smith模糊时滞补偿EHA半主动悬架仿真模型,并在模型补偿环节引入强、弱干扰进行仿真,结果如图14所示。
从图14可以看出,当补偿环节的悬架模型误差对系统造成干扰时,Smith预估补偿器的时滞补偿能力明显不如改进型Smith预估补偿器,同时,随着时滞补偿环节模型误差对系统干扰增大,Smith预估补偿器的时滞补偿能力急剧下降,甚至出现系统失稳现象,而改进型Smith预估补偿器通过动态反馈对模型参数误差进行自我修正,提高了时滞补偿能力和抗干扰能力。

图14 干扰条件下时滞预估补偿器效果
5 EHA半主动悬架时滞补偿效果试验验证
5.1 试验方案
利用EHA半主动悬架振动试验系统,对改进型Smith预估补偿器的时滞补偿效果进行试验研究。EHA台架试验系统如图15所示。该系统主要由电磁振动台、上、下横梁、螺旋弹簧、导向机构、滑块导轨支撑机构、DSP控制器、数据采集与处理系统等组成。其中,在上横梁加载配重块模拟簧载质量,EHA作动器、液压缸、下横梁模拟非簧载质量,并在上横梁处安装加速度传感器用以测量簧载质量加速度。试验中采用东华测试公司生产的DH186型加速度传感器对簧载质量加速度进行采集。

图15 EHA台架试验系统
为了进一步验证EHA半主动悬架时滞补偿控制效果,试验分为两组进行:含改进型Smith预估补偿器和不含改进型Smith预估补偿器。
5.2 试验结果分析
对含改进型Smith预估补偿器和不含改进型Smith预估补偿器的EHA半主动悬架的簧载质量加速度进行对比。输入频率、振幅不同的正弦激振力的试验结果如图16所示。

图16 不同频率、振幅的正弦力输入下时滞补偿试验结果
从图16可以看出,在不同振幅和频率的正弦激励输入下,含时滞补偿器的EHA半主动悬架的簧载质量加速度较不含时滞补偿器的EHA半主动悬架簧载质量加速度小,说明改进型Smith预估补偿器能够明显降低时滞对于半主动悬架的影响,同时验证了所建立的含改进型Smith预估补偿器的EHA半主动悬架模型的正确性。
6 结束语
针对时滞对EHA半主动悬架系统的影响,提出了一种改进型Smith时滞预估补偿器,将其用于模糊控制EHA半主动悬架进行时滞补偿,并进行了仿真与台架试验,结果表明,改进型Smith时滞预估补偿器能够对系统模型误差参数进行自我修正,从而提高系统的抗干扰能力,降低时滞对于半主动悬架的影响,提高了EHA半主动悬架的动态性能。
1 宋作军.汽车半主动悬架的非线性动力学分析.中国机械工程,2016,27(20):2835~2839.
2 Snamina J,Orkisz P.A Comparison of Active and Semi-Active Sliding Mode Controllers Applied in Vibration Reduction Systems.Solid State Phenomena,2016,248:93~102.
3 李罡,张晗,王彧,等.基于电磁阀式阻尼连续可调减振器的半主动悬架试验研究.汽车技术,2016,47(9):35~38.
4 Chen M Z Q,Hu Y,Li C,et al.Semi-active suspension with semi-active inerter and semi-active damper.IFAC Proceed⁃ings Volumes,2014,47(3):11225~11230.
5 寇发荣,范养强,张传伟,等.车辆电动静液压作动器的半主动悬架时滞补偿控制.中国机械工程,2016,27(15):2111~2117.
6 祖广浩.磁流变半主动悬架的史密斯预估器—泰勒级数扩展LQG时滞补偿控制:[学位论文].镇江:江苏大学,2016.
7 宋刚,许长城.考虑控制时滞的车辆主动悬架随机预瞄控制.农业机械学报,2013,44(6):1~7.
8 寇发荣,杜嘉峰,张传伟,等.电液自供能式车辆主动悬架多模式切换控制.机械科学与技术,2016,35(12):1937~1943.
9 申永军,祁玉玲,杨绍普,等.含时滞的单自由度半主动悬架系统的动力学分析.振动与冲击,2012,31(24):38~40.
10 刘长良,马增辉.Smith预估模型参数仿真分析及多目标优化.系统仿真学报,2014,26(8):1706~1712.
11 齐朝阳,郑恩让,侯再恩.模糊相轨迹模型Smith预估控制.系统科学与数学,2016,36(4):476~486.
12 陶业英,高嵩.汽车主动悬架模糊控制方法研究.汽车技术,2013,44(11):29~32.
(责任编辑 斛 畔)
修改稿收到日期为2017年6月30日。
Research on Time Delay Compensation Control of Semi-Active Suspension with EHA
Kou Farong,Wang Zhe,Fan Yangqiang,Du Jiafeng,Li Dong
(Xi′an University of Science and Technology,Xi′an 710054)
In order to improve vehicle ride comfort,the structure of vehicle semi-active suspension with EHA(Electro-Hydrostatic Actuator)was designed.The critical time delay of EHA semi-active suspension system was calculated,and the influence of time delay on EHA semi-active suspension was analyzed.In this paper,an improved Smith time delay predictive compensator was proposed,which was used to compensate the time delay of EHA semi-active suspension with fuzzy control,and simulation analysis and experimental verification were done.The results show that the improved Smith predictive compensator can correct the error of the suspension model parameters in compensation,improve the antiinterference ability of suspension system,and reduce the impact of the time delay on semi-active suspension,thereby improve the dynamic performance of EHA semi-active suspension.
EHA,Semi-active suspension,Improved Smith predictor compensator,Antiinterference,Timedelay compensation
EHA 半主动悬架 改进型Smith预估补偿器 抗干扰 时滞补偿
U463.33 文献标识码:A 文章编号:1000-3703(2017)10-0034-06
国家自然科学基金面上项目(51775426);陕西省教育厅服务地方专项计划项目(17JF017);国家自然科学基金项目(51275403)。
